西电计算机组成原理26
计算机组成原理实验报告 西电版

计算机组成原理实验报告成评语:绩教师:年月日班级:学号:姓名:地点:时间:实验一存储器实验1、F PGA中LPM_ROM定制与读出实验实验课件参考:/CMPUT_EXPMT/E XPERIMENTS/E XPMT3/实验3-1.PPT 实验示例参考:/CMPUT_EXPMT/Experiments/Expmt3 / DEMO_3_1_rom一.实验目的1、掌握FPGA中lpm_ROM的设置,作为只读存储器ROM的工作特性和配置方法。
2、用文本编辑器编辑mif文件配置ROM,学习将程序代码以mif格式文件加载于lpm_ROM中;3、在初始化存储器编辑窗口编辑mif文件配置ROM;4、验证FPGA中mega_lpm_ROM的功能。
二.实验原理ALTERA的FPGA中有许多可调用的LPM (Library Parameterized Modules)参数化的模块库,可构成如lpm_rom、lpm_ram_io、lpm_fifo、lpm_ram_dq的存储器结构。
CPU中的重要部件,如RAM、ROM可直接调用他们构成,因此在FPGA中利用嵌入式阵列块EAB可以构成各种结构的存储器,lpm_ROM是其中的一种。
lpm_ROM有5组信号:地址信号address[ ]、数据信号q[ ]、时钟信号inclock、outclock、允许信号memenable,其参数都是可以设定的。
由于ROM是只读存储器,所以它的数据口是单向的输出端口,ROM中的数据是在对FPGA现场配置时,通过配置文件一起写入存储单元的。
图3-1-1中的lpm_ROM 有3组信号:inclk——输入时钟脉冲;q[23..0]——lpm_ROM的24位数据输出端;a[5..0]——lpm_ROM的6位读出地址。
实验中主要应掌握以下三方面的内容:(1)lpm_ROM的参数设置;(2)lpm_ROM中数据的写入,即LPM_FILE初始化文件的编写;(3)lpm_ROM的实际应用,在GW48_CP+实验台上的调试方法。
2022年西安电子科技大学计算机网络技术专业《计算机组成原理》科目期末试卷B(有答案)
2022年西安电子科技大学计算机网络技术专业《计算机组成原理》科目期末试卷B(有答案)一、选择题1、某计算机的存储系统由Cache一主存系统构成,Cache的存取周期为10ms,主存的存取周期为50ms。
在CPU执行一段程序时,Cache完成存取的次数为4800次,主存完成的存取次数为200次,该Cache一主存系统的效率是()。
【注:计算机存取时,同时访问Cache和主存,Cache访问命中,则主存访问失效;Cache访问未命中,则等待主存访问】A.0.833B.0.856C.0.95 8D.0.8622、局部性原理是一个持久的概念,对硬件和软件系统的设计和性能都有着极大的影响。
局部性通常有两种不同的形式:时间局部性和空间局部性。
程序员是否编写出高速缓存友好的代码,就取决于这两方面的问题。
对于下面这个函数,说法正确的是()。
int sumvec(int v[N]){int i, sum=0;for(i=0;i<N;i++)sum+= v[i]eturn sum;}A.对于变量i和sum,循环体具有良好的空间局部性B.对于变量i、sum和v[N],循环体具有良好的空间局部性C.对于变量i和sum,循环体具有良好的时间局部性D.对于变量i、sum和v[N],循环体具有良好的时间局部性23、假定有4个整数用8位补码分别表示:rl=FEH,r2=F2H,r3=90H,r4=F8H,若将运算结果存放在一个8位寄存器中,则下列运算会发生溢出的是()。
A.rlxr4B.r2xr3C.rlxr4D.r2xr44、下列为8位移码机器数[x]移,当求[-x]移时,()将会发生溢出。
A.11111111B.00000000C.10000000D.011l1l115、并行加法器中,每位全和的形成除与本位相加两数数值位有关外,还与()有A.低位数值大小B.低位数的全和C.高位数值大小D.低位数送来的进位6、总线的数据传输速率可按公式Q=Wf/N计算,其中Q为总线数据传输速率,W为总线数据宽度(总线位宽/8),f为总线时钟频率,N为完成一次数据传送所需的总线时钟周期个数。
西电计算机组成原理26
微指令设计 一、微指令地址的生成
2. 单地址格式
IR
(计数方式, 增量方式)
状态标志
加载 分支 分支 地址 逻辑
K 微程序首地址
多路选择器
PC
加1 复位
跳
转
地
址
CM
硬件代价极低 PC利用率高
分支控制
微指令长度被有效地缩短
IR AC 地址 控制域
图6.13 单地址格式的分支控制逻辑 17
微指令设计 一、微指令地址的生成
13
微指令设计
微指令的一般格式:
地址域:决定如何取得微指令 控制域:微指令的执行
设计微指令需要从两方面考虑:
微指令的长度 → 减少控制器占CPU集成芯片的面积 微指令的执行时间 → 提高CPU的工作速度
14
微指令设计 一、微指令地址的生成
下一条微指令的地址有三种可能: ①由指令寄存器确定的微程序首地址: 每一个指令周期仅出现一次,且仅出现在刚刚获 取一条指令之后。 ②下一条顺序地址 下一条微指令地址=当前微指令地址+1 ③分支跳转地址 无条件和条件跳转 两分支和多分支跳转
12
微程序控制原理
三、微程序控制器的一般结构和工作原理
微程序控制器在一个时钟周期内完成如下工作: ① 时序逻辑电路给控制存储器发出read命令; ② 从微地址寄存器AR指定的控存单元读出微指 令,送入微指令寄存器IR; ③ 根据微指令寄存器的内容,产生控制信号,给 时序逻辑提供下条微地址信息; ④ 时序逻辑根据来自微指令寄存器的下条微地址 信息和CPU内外状态,给微地址寄存器加载一 个新的微地址。
3. 可变格式
使任何微指令执行时不存在无用信息:让微指令在
顺序执行时只提供控制信号的产生,需要分支时再
西安电子科技大学_计算机组成与体系结构_第3章运算方法与运算器_课件PPT
17
3.1.1 加减运算 4. n位加法器的实现
2) 先行进位加法器
三级门的延时
P3* G3*
C4
C3
C2
C1
≥1
≥1
≥1
≥1
≥1
&
&& &
&
&& &
&&
&
G3
&
X3 Y3
P3
≥1
X3 Y3
G2
&
X2 Y2
P2
≥1
G1 P1
& ≥1
G0 P0
& ≥1
X2 Y2 X1 Y1 X1 Y1 X0 Y0 X0 Y0 C0
x xxxxxxx
10
3.1.1 加减运算 2. 溢出判断 3) 根据运算结果的符号位和进位标志判别
适用于两同号数求和或异号数求差时判别溢出。溢出 的逻辑表达式为:
VF=SF⊕CF
0 xxxxxxx 1 xxxxxxx + 0 xxxxxxx + 1 xxxxxxx
c s xxxxxxx c s xxxxxxx
01100010 …98
11000001 … -63 + 11011101 …11111 … 63 + 11011101 … -35
100011100 … 28
7
3.1.1 加减运算 2. 溢出判断
当两个同符号的数相加(或者是相异符号数相减)
时,运算结果可能发生溢出。 00111111 …63
补码一位乘法:校正法,布斯(Booth)法
补码二位乘法
阵列乘法器
适于流水线工作的阵列乘法器
32
3.1.2 乘法运算 1. 原码乘法运算
1) 原码一位乘法的法则 假定被乘数X和乘数Y为用原码表示的纯小数,
电子科技大学计算机组成原理计算机组成原理PPT课件

计算机的硬件
1.2.1 计算机的硬件系统组成CPU
(第3章) 控 制 器
运算器
高速缓存
总
( 第
线
4 章
主存储器
和
)
输
入
虚拟存储器
输 出
(磁盘设备)
接 口
(第5章)
输入设备 ( 第 6 章
输出设备 )
第22页/共62页
计算机的一般组成结构为: 运算器+存储器+控制器+输入/
输出设备。
输出结果
执行指令
存储程序
将程序转换为 指令序列
图 计算机的工作流程
第15页/共62页
1.1.2 信息的数字化表示
1. 在计算机中用数字代码表示各种信息 二进制代码
例1 用数字代码表示数据 5 表示为 0 101
- 5 表示为 1 101
第16页/共62页
例2 用数字代码表示字符
A 表示为 1000001
的辅助存储器。 如:磁盘存储器、光盘存储器等,其主要特
点是存储容量大,价格便宜,工作速度较慢。
第34页/共62页
/
………… …………
地 址 寄 存
译 码 器
器
存储体
控制线路
读
数
写 线
据 寄 存
路
器
讨论
存储单元读/写原理、存储器逻辑设计
第35页/共62页
/
………… …………
地 址 寄 存
译 码 器
B 表示为 1000010
例3 用数字代码表示命令、状态
启动
表示为 00
停止
表示为 01
正在工作 表示为 10
西安电子科技大学834数据结构、计算机组成原理2021年考研专业课初试大纲

834“数据结构、计算机组成原理”复习参考提纲一、考察目标834 数据结构、计算机组成原理要求考生比较系统地掌握上述专业基础课程的基本概念、基本原理和基本方法,能够综合运用所学的基本原理和基本方法分析、判断和解决有关理论问题和实际问题。
二、考试形式和试卷结构1、试卷满分及考试时间:本试卷满分为150,考试时间为180分钟2、答题方式:闭卷,笔试3、试卷内容结构:数据结构75分、计算机组成原理75分三、考察范围数据结构:【总体要求】“数据结构”要求学生掌握常用数据结构的构造和实现,具备应用数据结构分析、设计和求解实际问题的能力。
要求掌握数据结构的基本概念、基本原理和基本方法;掌握线性结构、树和图的逻辑结构、存储(物理)结构,以及基本操作在不同存储结构上的实现,并能够对基本算法进行时间复杂度和空间复杂度分析;掌握基本的查找和排序方法及其算法实现,并能够利用这些方法对实际问题进行分析和求解,具备采用C或C++或Java等编程语言设计与实现算法的能力。
(一)线性表 1)线性表的基本概念和基本操作2)线性表的顺序存储及实现3)线性表的链式存储及实现4)线性表的应用(二)栈和队列 1)栈和队列的基本概念和基本操作2)栈和队列的存储结构与实现(1)栈的顺序存储及实现(2)栈的链式存储及实现(3)队列的链式存储及实现(4)循环队列的定义及实现3)栈和队列的应用(三)串1)串的基本概念和基本操作2)串的顺序存储、链式存储及实现3)串的模式匹配(1)基本的模式匹配算法(2)KMP模式匹配算法(模式串的next函数计算)(四)数组和广义表1)数组的基本概念和基本操作2)数组的顺序存储3)特殊矩阵的压缩存储、稀疏矩阵的压缩存储4)广义表的基本概念和存储结构(五)树与二叉树1)树的基本概念2)二叉树(1)二叉树的定义及性质(2)二叉树的顺序存储和链式存储(3)二叉树的先序、中序、后序遍历和层序遍历运算(4)线索二叉树的定义与基本运算3)树和森林(1)树的存储结构(2)树(森林)与二叉树的相互转换(3)树和森林的遍历4)哈夫曼(Huffman)树的构造与应用(六)图1)图的基本概念和基本操作2)图的存储结构(1)数组表示法(邻接矩阵表示法)(2)邻接表表示法、逆邻接表表示法(3)邻接多重表(4)十字链表3)图的遍历(1)深度优先遍历(DFS)算法(2)广度优先遍历(BFS)算法4)图的应用(1)最小生成树求解方法(Prim算法、Kruskal算法)(2)最短路径求解方法(Dijkstra算法、Floyd算法)(3)AOV-网和拓扑排序方法(4)AOE-网和关键路径求解方法(七)查找1)查找的基本概念2)静态查找表(1)无序顺序表、有序顺序表(2)顺序查找算法(3)折半查找算法、折半查找判定树的构造3)动态查找表(1)二叉查找树(二叉检索树、二叉排序树)的构造及查找、插入和删除运算(2)平衡二叉树的构造及查找运算(3)B-树的特点及查找运算(4)B+树的基本概念4)哈希表(1)哈希表的基本概念(2)哈希表的构造及查找运算5)查找算法的分析(平均查找长度计算)及应用(八)排序1)排序的基本概念(排序过程中的基本操作、排序算法的时空复杂度及稳定性)2)简单排序方法(1)直接插入排序算法(2)冒泡排序算法(3)简单选择排序算法3)快速排序4)堆排序5)归并排序6)基数排序(1)多关键排序方法(2)链式基数排序方法及特点7)外部排序的基本概念计算机组成原理:【总体要求】“计算机组成原理”要求学生掌握单处理器计算机系统中各部件的内部工作原理、组成结构以及相互连接方式,具有完整的计算机系统的整机概念。
计算机组成原理ThePrincipleofComputer

6.2.1 控制方式
2.异步控制方式 可变时序控制方式或应答控制方式。执行一条指令需要多 少节拍,不作统一的规定,而是根据每条指令的具体情况 而定,需要多少,控制器就产生多少时标信号。 特点:每一条指令执行完毕后都必须向控制时序部件发回 一个回答信号,控制器收到回答信号后,才开始下一条指 令的执行。 优点:指令的运行效率高; 缺点:控制线路比较复杂。 异步工作方式一般采用两条定时控制线来实现。我们把这 两条线称为“请求”线和“回答”线。当系统中两个部件 A和B进行数据交换时,若A发出“请求”信号,则必须有 B的“回答”信号进行应答,这次操作才是有效的,否则 无效。 16 计算机组成原理 西北工业大学计算机学院
I/O状态信息
MAR
对各功能部件产生控制
去内存取指令或取数据
……
...
PC
增量
PSR
GR
微操作信号产生器
…
...
ALU
…
时序部件 启停电路
...
指令译码器
...
地址形成部件
到MAR 或ALU
DB
AB
O P 寻址方式 AC
IR …
中断控制逻辑
…
控制台 脉冲源
DB MDR
…… 中断源
8
控制器基本结构
计算机组成原理 西北工业大学计算机学院
计算机组成原理
西北工业大学计算机学院
5
6.1.2控制器的基本功能
1.控制指令的正确执行
(1)指令流出控制:取指令 (PC)→MAR,Read (MDR) →IR (2)分析指令:指令译码器ID分析确定操作性质,判明 寻址方式并形成操作数的有效地址EA (3)执行:根据分析的结果和形成的EA产生相应的操作 控制信号序列,控制相应部件完成操作 (4)指令流向控制:下一条指令地址的形成控制 ①(PC)=本条指令的(PC)+本条指令字长 ② (PC)=转移的目标地址(或子程序入口地 址,或中断服务程序入口地址)
2022年西安电子科技大学数据科学与大数据技术专业《计算机组成原理》科目期末试卷B(有答案)
2022年西安电子科技大学数据科学与大数据技术专业《计算机组成原理》科目期末试卷B(有答案)一、选择题1、存储器采用部分译码法片选时,()。
A.不需要地址译码器B.不能充分利用存储器空间C.会产生地址重叠D.CPU的地址线全参与译码2、下列存储器中,在工作期间需要周期性刷新的是()。
A. SRAMB. SDRAMC.ROMD. FLASH3、下列关于进制的说法中正确的是()。
I.任何二进制整数都可用十进制表示Ⅱ.任何二进制小数都可用十进制表示Ⅲ.任何十进制整数都可用二进制表示IⅣ.任何十进制小数都可用二进制表示A.I、ⅢB. I、Ⅱ、ⅢC.I、Ⅱ、Ⅲ、ⅣD.Ⅱ、IV4、在补码加减交替除法中,参加操作的数和商符分别是()。
A.绝对值的补码在形成商值的过程中自动形成B.补码在形成商值的过程中自动形成C.补码由两数符号位“异或”形成D.绝对值的补码由两数符号位“异或”形成5、计算机中表示地址时,采用()。
A.原码B.补码C.移码D.无符号数6、下列有关总线定时的叙述中,错误的是()。
A.异步通信方式中,全互锁协议最慢B.异步通信方式中,非互锁协议的可靠性最差C.同步通信方式中,同步时钟信号可由各设备提供D.半同步通信方式中,握手信号的采样由同步时钟控制7、在异步通信方式中,一个总线传输周期的过程是()。
A.先传送数据,再传送地址B.先传送地址,再传送数据C.只传输数据D.无法确定8、计算机()负责指令译码。
A.算术逻辑单元B.控制单元(或者操作码译码器)C.存储器电路D.输入/输出译码电路9、下列选项中,能缩短程序执行时间的措施是()。
1.提高CPU时钟频率Ⅱ.优化数据通路结构ll.对程序进行编译优化A.仪I、ⅡB.仅I、ⅢC.仅Ⅱ、ID.I、Ⅱ、Ⅲ10、在中断周期,CPU主要完成以下工作()。
A.关中断,保护断点,发中断响应信号并形成中断服务程序入口地址B.开中断,保护断点,发中断响应信号并形成中断服务程序入口地址C.关中断,执行中断服务程序D.开中断,执行中断服务程序11、若磁盘转速为7200r/min,平均寻道时间为8ms,每个磁道包含1000个扇区,则访问一个扇区的平均存取时间大约是()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8
微程序控制原理
二、微指令 对在一个时间单位(节拍)内出现的一组微操作进 行描述的语句称作微指令(microinstruction)。 一个微指令序列称作微程序(microprogram)或固 件(firmware)。 通过一组微指令产生的控制信号,使一条指令中的 所有微操作得以实现,从而实现一条指令的功能。 指令、微程序、微指令的关系:
两地址格式(断定方式) 单地址格式(计数方式,增量方式) 可变格式
15
微指令设计
1. 两地址格式 (断定方式)
一、微指令地址的生成
IR K 微程序首地址 多路选择器
地址 状态标志 分支 选择 逻辑
AR
跳 转 地 址
顺 序 地 址
CM
条件选择
IR AC 地址1 地址2 控制域
图6.12 两地址格式的分支控制逻辑
13
微指令设计
微指令的一般格式:
地址域:决定如何取得微指令 控制域:微指令的执行 微指令的长度 → 减少控制器占CPU集成芯片的面积 微指令的执行时间 → 提高CPU的工作速度
设计微指令需要从两方面考虑:
14
微指令设计
一、微指令地址的生成
下一条微指令的地址有三种可能:
①由指令寄存器确定的微程序首地址: 每一个指令周期仅出现一次,且仅出现在刚刚获 取一条指令之后。 ②下一条顺序地址 下一条微指令地址=当前微指令地址+1 ③分支跳转地址 无条件和条件跳转 两分支和多分支跳转
18
微指令设计
3. 可变格式
一、微指令地址的生成
IR K 微程序首地址 多路选择器 PC 分 支 控 制 S=1 跳 转 地 址 CM IR S 控制域/地址域
加载 分支 状态标志 分支 地址 逻辑
加1 复位
图6.14 可变格式的分支控制逻辑 (设S=0,控制指令;S=1,跳转指令)
AC
S=0
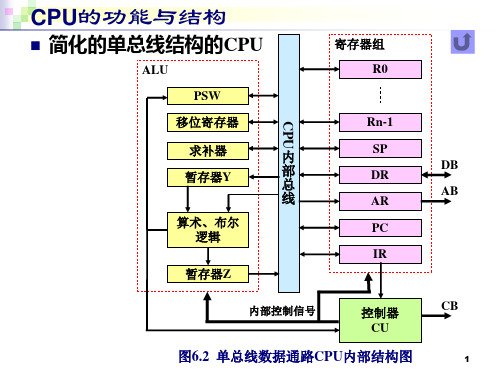
CPU的功能与结构
简化的单总线结构的CPU
ALU PSW 移位寄存器 求补器 暂存器Y
寄存器组 R0
Rn-1 SP
CPU 内 部 总 线
DR
AR PC IR
DB
AB
算术、布尔 逻辑 暂存器Z
内部控制信号
控制器 CU
CB
图6.2 单总线数据通路CPU内部结构图
1
微操作
二、微操作流程 1. 时序信号的产生 (1)节拍周期信号的产生 状态利用率高 需要采取措施消除竞争冒险
字段2(4位)
NOP 0000 R0out 0001 R1out 0010 …… R7out 1000 IRout 1001 Zout 1010 ARout 1011 DRIout 1100 DRSout 1101 PCout 1110 SPout 1111
字段3(4位)
NOP ADD SUB AND OR SHL SHR ROL ROR PC+1 SP+1 SP-1 0000 0001 0010 0011 0100 0101 0110 0111 1000 1001 1010 1011
按功能 按功能 按功能/资源 按资源
微指令设计
图6.2 图6.9
字段1(4位)
NOP 0000 R0in 0001 R1in 0010 …… R7in 1000 IR in 1001 Yin 1010 ARin 1011 DRIin 1100 DRSin 1101 PCin 1110 SPin 1111
16
微指令设计
2. 单地址格式 (计数方式, 增量方式)
一、微指令地址的生成
IR K 微程序首地址 多路选择器 PC 跳 转 地 址 加1 复位
加载 分支 状态标志 分支 地址 逻辑
CM
硬件代价极低 分支控制 PC利用率高 微指令长度被有效地缩短
IR AC
地址
控制域
图6.13 单地址格式的分支控制逻辑
字段4(3位)
NOP Mread Mwrite IOread IOwrite
字段5
000 其他信号 001 010 011 100
表6.2 优化后的 字段组织和编码
28
*NOP为无效控制信号
二、微指令控制域编码 1. 水平型微指令控制域的编码 (3) 字段译码法(字段编码) 也可以对字段进行关联设计,使一个域用于解释另 一个域。
12
微程序控制原理
三、微ห้องสมุดไป่ตู้序控制器的一般结构和工作原理
微程序控制器在一个时钟周期内完成如下工作: ① 时序逻辑电路给控制存储器发出read命令; ② 从微地址寄存器AR指定的控存单元读出微指 令,送入微指令寄存器IR; ③ 根据微指令寄存器的内容,产生控制信号,给 时序逻辑提供下条微地址信息; ④ 时序逻辑根据来自微指令寄存器的下条微地址 信息和CPU内外状态,给微地址寄存器加载一 个新的微地址。
一 条 机 器 指 令 T1: 微操作1(命令1,命令2,…) 微指令1 微操作2(命令1,命令2) …… Tj: 微操作i(命令1,命令2,…) 微指令j …… Tm:微操作n(命令1) 微指令m 一 个 微 程 序
9
微程序控制原理
二、微指令 一条(机器)指令对应一个微程序,该微程序包含 从取指令到执行指令一个完整微操作序列对应的全 部微指令,它被存入一个称为控制存储器(control memory)的ROM中。 在控制存储器中存放着指令系统中定义的所有指令 的微程序。 微指令周期:一条微指令执行的时间(包括从控制 存储器中取得微指令和执行微指令所用时间)。 微指令的一般格式:
21
二、微指令控制域编码 1. 水平型微指令控制域的编码 (1) 直接表示法 可以在同一个时间有效的控制信号称为相容信号, 具有相容性; 不能在同一个时间有效的控制信号称为互斥信号, 具有互斥性。
控制信号 …… 下一微地址
微指令设计
控制域
图6.15 直接表示法
22
二、微指令控制域编码 1. 水平型微指令控制域的编码 (2) 译码法 采用编码的方法表示控制信号。 可以极大地缩短微指令控制域的长度。 各控制信号需要通过不同的微指令在不同时间来 产生,所以各控制信号是相斥的,这也被称为垂 直编码。 不能实现一个节拍提供多个控制信号的任务,从 而使指令周期的节拍数增多,微程序中包含的微 指令数量增多,(机器)指令执行时间增长。
24
微指令设计
二、微指令控制域编码 1. 水平型微指令控制域的编码 (3) 字段译码法 字段 字段 字段 (字段编码)
译码器 译码器 译码器
微指令设计
译码器 字段 字段 字段 控制信号
译码器
译码器
译码器
(b)间接译码
控制信号 (a)直接译码
图6.16 字段译码法
25
二、微指令控制域编码 1. 水平型微指令控制域的编码 (3) 字段译码法(字段编码) 每个字段中要设计一个无效控制信号的编码 若控制域的某字段有m位,则可以提供2m-1个控 制信号的编码 字段组织的有效方法: 按功能组织:把功能类同的各控制信号放在同 一字段中。 按资源组织:把加载到同一部件上的各控制信 号放在同一字段中。
地址域 控制域 生成下条微指令地址
产生控制信号
10
微程序控制原理
三、微程序控制器的 一般结构和 工作原理
状态 时钟 控制单元 时序 逻辑 read
指令寄存器
译码器1
微地址寄存器
控制存储器
微指令寄存器 下一地址及控制 译码器2
图6.11 微程序控制器的一般结构
CPU内部 到系统总 控制信号 线的控制 信号
74LS199
时钟 T CP0 CP1 D0 D7 +5V 反向延时
RESET SH / LD
Q0 Q1 Q7
节拍 T1 T2 T8
T T T
J
K
结束 END T
& 图 6.6
CR
没有竞争冒险问题 状态利用率低
移位型节拍脉冲发生器(节拍数≤8)
3
微操作
二、微操作流程
4
微操作
5
微操作
6
西安电子科技大学 计算机学院
计算机组织与体系结构
中央处理器(CPU)
微程序控制器设计
2017年9月28日 23:34:38
微程序控制原理
一、微程序控制基本思想
指导思想:用软件方法组织和控制数据处理系统的 信息传送,并最终用硬件实现。 基本思想:依据微程序顺序产生一条指令执行时所 需的全部控制信号。 相当于把控制信号存储起来,因此又称存储控制逻 辑方法。
11
微程序控制原理
三、微程序控制器的一般结构和工作原理
控制存储器(CM)
指令长度 微程序占用的存储单元数
微指令寄存器IR、微地址寄存器AR 时序逻辑
依据时钟按节拍为控制存储器提供读出控制信号。 在微程序运行时依据CPU内外状态(ALU标志、中断请 求、DMA请求等)和当前微指令地址域的信息生成下一 条微指令地址,并将其装入到微地址寄存器中。
门
译码器
19
微指令设计
一、微指令地址的生成
4. 三种地址域格式的比较 两地址格式
分支逻辑较简单,下条微指令地址可以快速生成 地址域较长,微指令较长,控存单元需要较多的位数 减少了指令的长度,控制存储器的容量大为减小 微程序计数器加1的速度决定了顺序地址产生的时间 长度最短,要求控存单元的位数最少 专用的跳转微指令:微程序的长度增加,控存单元数量增 加,机器指令执行时间增长 下条微指令地址的生成时间与单地址格式基本一致