485通讯协议设置
RS485通信协议

RS485通信协议协议名称:RS485通信协议1. 引言RS485通信协议是一种用于串行通信的标准协议,广泛应用于工业自动化领域。
本协议旨在规范RS485通信的物理层、数据帧格式、通信速率等方面的要求,以确保设备之间的可靠通信。
2. 物理层要求2.1 电气特性RS485通信使用差分信号进行数据传输,要求传输线路上的电压差在±200mV范围内,以确保抗干扰能力和传输质量。
2.2 线路连接RS485通信采用多点通信方式,允许最多32个设备连接在同一条总线上。
每个设备需具备一个唯一的地址,以便进行数据传输和设备识别。
2.3 线路长度RS485总线的长度应根据通信速率和电缆特性进行合理设计,以保证通信的稳定性。
通常情况下,总线长度不超过1200米。
3. 数据帧格式3.1 帧起始标识RS485通信使用起始标识来标识数据帧的开始,通常为一个字节的特定值(如0xAA)。
3.2 帧地址数据帧中的地址字段用于指示接收方设备的地址,以确保数据传输的目标设备。
3.3 数据字段数据字段用于携带实际的数据信息,其长度根据实际需求进行定义。
3.4 校验字段为了保证数据的完整性和准确性,数据帧中通常包含一个校验字段,用于验证数据的正确性。
3.5 帧结束标识数据帧以结束标识来标识数据帧的结束,通常为一个字节的特定值(如0x55)。
4. 通信速率RS485通信的速率可根据实际需求进行设置,常见的通信速率有9600bps、19200bps、38400bps等。
通信双方需协商确定相同的通信速率,以确保数据的正确传输。
5. 错误处理通信过程中可能会发生错误,如数据丢失、校验错误等。
在RS485通信协议中,通常使用重发机制来处理错误数据帧,确保数据的可靠性和准确性。
6. 示例代码以下是一个简单的示例代码,用于说明RS485通信协议的实际应用:```c// 初始化串口void initSerial() {// 设置通信速率为9600bpssetBaudRate(9600);// 设置数据位、停止位等参数setParameters(8, 1);}// 发送数据void sendData(uint8_t address, uint8_t data) {// 构造数据帧uint8_t frame[5];frame[0] = 0xAA; // 帧起始标识frame[1] = address; // 帧地址frame[2] = data; // 数据字段frame[3] = calculateChecksum(frame); // 校验字段 frame[4] = 0x55; // 帧结束标识// 发送数据帧sendFrame(frame);}// 接收数据void receiveData() {uint8_t frame[5];// 接收数据帧receiveFrame(frame);// 检查帧起始标识、校验字段、帧结束标识等if (frame[0] == 0xAA && frame[4] == 0x55 && verifyChecksum(frame)) {// 解析数据帧uint8_t address = frame[1];uint8_t data = frame[2];// 处理数据processData(address, data);}}```7. 总结RS485通信协议是一种用于工业自动化领域的标准协议,通过规范物理层、数据帧格式、通信速率等方面的要求,确保设备之间的可靠通信。
MCGS与RS485通讯协议设定

实验名称:《MCG实现RS485通信协议设定》一、实验目的:1、实现MCGS! RS485通信协议的互相配合。
2、了解RS485通信协议的工作原理。
二、实验内容:1、通信系统硬件设计:RS485有多个引出线接口,并且可以多个驱动器和接收器,因此可以实现一台PC与多台单片机间的串行通信。
2、通信协议:上位机的信息可以传送到各个下位机或指定的下位机,下位机发送的信息只能为上位机所接收,各个下位机之间不能直接通信。
3、串行通信软件设计:上位机:上位机软件采用VC6.0编程实现。
下位机:下位机与上位机的通信采用中断方式实现。
三、实验步骤1、运行MCG软件在设备管理中调出以下窗口2、通用串口设备属性编辑:检查(ig |确认职消国|帮朋凹3、设备属性设置:『垂疣匡I通遇逗援I谟脊调迖I魏擴处連说輕属性若啜皆朋性恒1商珈居性1茯芒谗备也部巨性曲线帮羽I查右榻各在繚菲助遼备塔粉说吉■(]虹何甲显控制仗杖始工■!服右 1 -启载呈•十'乘zJfcfST朋[my] 1 UU愎晶地址»电诒号吗检査购隔认(X) 収消IO 却助UAJKt^snatTi — I 術番HI县本屈性|迪逍連堆[萸里<工]救据处迎|通i直兮对五藪攥对隸逋道■■直通道弦聖0D通倍伏志1 1.0鈕修改掃击2Z.U仪表冀型3Z4.0测爭悄*1U.0第一振普妆寺5U.0曲1服書桟六取消口帮期U1J4、属性设置完成,然后用手捂住测温计,观察PC机上显示的温度数值。
四、实验小结:[温馨提醒:合同协议是经验性极强的领域,无法思考和涵盖全面,最好找专业律师起草或审核后使用。
范文供参考,期待你的好评与关注]。
485通讯协议
485通讯协议协议名称:485通讯协议1. 引言本协议旨在规范485通讯协议的标准格式和通信规则,以确保各设备之间的稳定和可靠通信。
本协议适用于使用485通讯协议的各种设备和系统。
2. 定义2.1 485通讯协议:指使用RS-485通信标准进行数据传输的通信协议。
2.2 主设备:指控制和管理485通信网络的设备。
2.3 从设备:指通过485通信网络接收和执行指令的设备。
3. 通信规则3.1 物理连接3.1.1 485通信网络采用两线制,分别为A线和B线,其中A线为数据线,B 线为地线。
3.1.2 通信设备之间的连接应遵循正确的线序,确保A线与A线相连,B线与B线相连。
3.1.3 通信设备之间的连接线路应符合RS-485标准,保证信号传输的稳定性和可靠性。
3.2 通信速率3.2.1 485通信网络的通信速率应根据实际需求进行设置,通常可选的速率为2400bps、4800bps、9600bps、19200bps等。
3.2.2 主设备和从设备之间的通信速率应保持一致,以确保数据的正确传输。
3.3 数据帧格式3.3.1 485通讯协议采用固定长度的数据帧进行通信,数据帧格式如下:- 起始位:1个字节,固定为0x55。
- 设备地址:1个字节,表示发送方或接收方的设备地址。
- 数据长度:2个字节,表示数据域的长度。
- 数据域:长度可变,根据实际需求确定。
- 校验位:1个字节,用于校验数据的完整性。
- 结束位:1个字节,固定为0xAA。
3.4 数据传输3.4.1 主设备向从设备发送数据时,应按照数据帧格式封装数据,并通过485通信网络发送。
3.4.2 从设备接收到数据后,应按照数据帧格式解析数据,并进行相应的处理。
3.4.3 数据传输过程中,主设备和从设备应遵循半双工通信原则,即同一时间只能有一方发送数据,另一方处于接收状态。
4. 错误处理4.1 校验错误4.1.1 接收方在接收到数据后,应根据校验位对数据进行校验。
RS-485通信协议
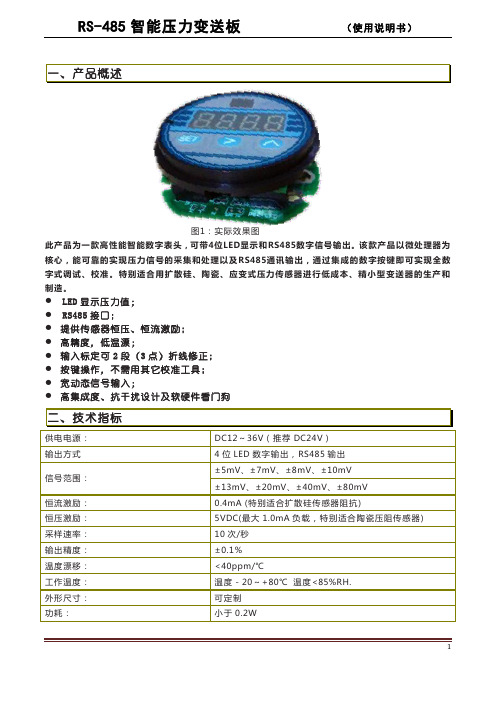
一、产品概述图1:实际效果图此产品为一款高性能智能数字表头,可带4位LED显示和RS485数字信号输出。
该款产品以微处理器为核心,能可靠的实现压力信号的采集和处理以及RS485通讯输出,通过集成的数字按键即可实现全数字式调试、校准。
特别适合用扩散硅、陶瓷、应变式压力传感器进行低成本、精小型变送器的生产和制造。
●LED显示压力值;●RS485接口;●提供传感器恒压、恒流激励;●高精度,低温漂;●输入标定可2段(3点)折线修正;●按键操作,不需用其它校准工具;●宽动态信号输入;●高集成度、抗干扰设计及软硬件看门狗【接线】图2:接线图【传感器端接线说明】S+:信号正, V+:激励电源正 S-:信号负 V-:激励电源负 【尺寸图】【校准步骤】SET键:功能选择; ^键:数据调整增加键;>键:数据左移键和菜单下翻键一.通讯参数设置密码0085一)、输入密码:测量状态下双击SET键,LED显示“-0000-”,最右边闪烁,按调整键“^”(数据增加键)5次,屏显示“0005”,按“>”键(数据左移键),屏显示“0005”,十位闪烁,按^键(数据增加键)8次,屏显示“0085”,按SET键确认后进入通讯参数设置界面二)、485参数设置LED显示“addr”, 选择地址编号,按SET键显示“001”(上次设置值,这里是001,也可能是1到255之间的任意值),通过“>”键(数据左移键)和^键(数据增加键)来设置地址数值(范围1--255),设置好后按SET键返回到“addr”,按“>”键显示“bps”,选择波特率,按SET键显示9600(默认),通过^键(数据增加键)来调整波特率,调整好后按SET返回到“bps”再按“>”键显示“Euod”选择奇偶校验,按SET键显示-0000-,按^键选择:0000:无校验0001:奇校验0002:偶校验,设置完成后按SET键返回到“Euod”,再按“>”键显示“End”,按下SET键完成参数设置。
RS485通讯 modbus 协议

使用说明书 - 1 -_MODBUS 通讯协议说明一.通讯说明控制器采用RS-485总线,协议符合ModBus RTU 规约。
数据传输均采用8位数据位、1位停止位、无奇偶校验位。
波特率可设为1200-9600 bit/s 。
通讯传送分为独立的信息头,和发送的编码数据。
以下的通讯传送方式定义与RTU 通讯规约相初始结构 = >=4字节的时间地址码 = 1 字节功能码 = 1 字节数据区 = N 字节错误校检 = 16位CRC 码结束结构 = >=4字节的时间地址码:地址码为通讯传送的第一个字节。
这个字节表明由用户设定地址码的从机将接收由主机发送来的信息。
并且每个从机都有具有唯一的地址码,并且响应回送均以各自的地址码开始。
主机发送的地址码表明将发送到的从机地址,而从机发送的地址码表明回送的从机地址。
功能码:通讯传送的第二个字节。
ModBus 通讯规约定义功能号为1到127。
本控制器利用其中的一部分功能码。
作为主机请求发送,通过功能码告诉从机执行什么动作。
作为从机响应,从机发送的功能码与从主机发送来的功能码一样,并表明从机已响应主机进行操作。
如果从机发送的功能码的最高位(比如功能码大于127),则表明从机没有响应操作或发送出错。
数据区:数据区是根据不同的功能码而不同。
CRC 码:二字节的错误检测码。
当通讯命令发送至仪器时,符合相应地址码的设备接通讯命令,并除去地址码,读取信息,如果没有出错,则执行相应的任务;然后把执行结果返送给发送者。
返送的信息中包括地址码、执行动作的功能码、执行动作后结果的数据以及错误校验码。
如果出错就不发送任何信息。
1 2.信息帧格式:(1) 地址码: 地址码是信息帧的第一字节(8位),从0到255。
这个字节表明由用户设置地址的从机将接收由主机发送来的信息。
每个从机都必须有唯一的地址码,并且只有符合地址码的从机才能响应回送。
当从机回送信息时,相当的地址码表明该信息来自于何处。
485自定义通讯协议

00字节4
00字节5
00字节6
08字节7
F1字节8FF其中:
第1个字节02为采集模块地址
第2个字节04为读取数据功能码
第3~6个字节00 00 00 08代表读取采集模块指令码
第7~8个字节F1 FF为采集模块设备的校验码
2.电压采集时发送指令为:
字节1
03字节2
04字节3
00字节4
00字节5
485
本项目通过485与采集模块通讯,为了提高系统的可靠性,上位机与下位机DSP均能实现数据的采集和显示。上位机数据采集与ADAM4117和ADAM4118的数据采集采用485通讯模式。
其中,485通讯默认波特率9600,采用modbus协议。
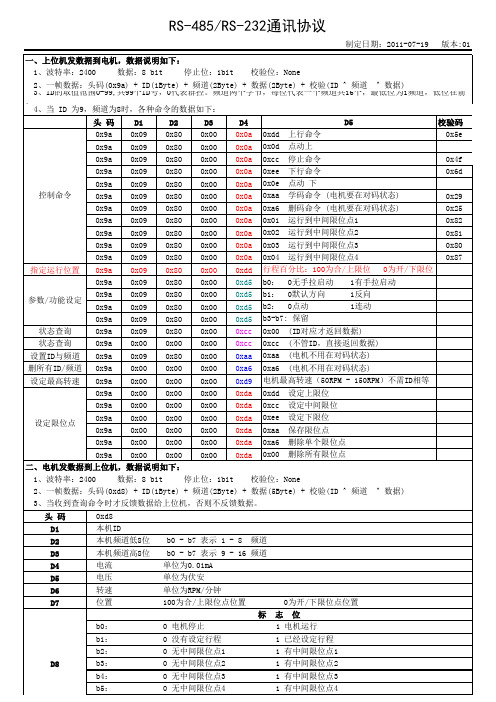
一、上位机发送
1.温度采集时发送指令为:
字节1
02字节2
xx3
10
14
xx15
xx16
xx17
xxቤተ መጻሕፍቲ ባይዱxx5
xx6
xx7
xx
18
xx数据
19
xx20
-21
-8
xx9
xx10xx11xx数据
其中:
第1个字节为02,表示接收到的数据为温度数据;
03,表示接收到的数据为电压数据。
第2个字节04,可以作为校验使用;
第3个字节10,可以作为校验使用。
第4~19个字节,共16个字节,为8个通道的温度或电压数据。即2个字节表示一个通道的数据值。
00字节6
08字节7
F0字节82E其中:03为采集模块地址
04为读取数据功能码
第3~6个字节00 00 00 08代表读取采集模块指令码
第7~8个字节F0 2E为采集模块设备的检验码
485通信协议中的波特率

485通信协议中的波特率摘要:1.485 通信协议简介2.波特率的概念和作用3.485 通信协议中的波特率设置4.波特率对通信距离和传输速度的影响5.如何选择合适的波特率正文:485 通信协议,作为一种串行通信协议,广泛应用于工业自动化、智能建筑、智能家居等领域。
在485 通信中,波特率是一个重要的参数,它直接影响到通信的稳定性、传输距离和传输速度。
首先,我们需要了解什么是波特率。
波特率,是指单位时间内传输的比特数,通常用比特/秒(bps)表示。
它是通信中数据传输速率的一种衡量方式。
在485 通信中,波特率决定了通信双方传输和接收数据的速度。
在485 通信协议中,波特率的设置是一个关键步骤。
一般情况下,我们可以通过调整发送设备的波特率设置来匹配接收设备的波特率。
常见的波特率设置有:9600bps、19200bps、38400bps、57600bps、115200bps 等。
选择合适的波特率,可以保证通信的稳定性和传输效率。
此外,波特率对通信距离和传输速度也有影响。
通常情况下,波特率越高,传输距离越短;波特率越低,传输距离越长。
这是因为高波特率下,信号传输的频率较高,更容易受到干扰,从而导致通信距离的减小。
因此,在选择波特率时,需要根据实际通信距离和传输需求进行权衡。
那么,如何选择合适的波特率呢?首先,要考虑通信距离。
如果通信距离较近,可以选择较高的波特率,以提高传输速度;反之,如果通信距离较远,应选择较低的波特率,以保证通信的稳定性。
其次,要考虑传输需求。
对于实时性要求较高的应用场景,可以选择较高的波特率;而对于实时性要求不高的场景,可以选择较低的波特率。
总之,485 通信协议中的波特率设置是一个需要综合考虑多种因素的过程。
只有选择合适的波特率,才能保证通信的稳定性、传输距离和传输速度。
RS485通讯协议
设定最高转速 0x9a 0x00 0x00 0x00 0xd9 电机最高转速(50RPM - 150RPM)不需ID相等
0x9a 0x00 0x00 0x00 0xda 0xdd 设定上限位
0x9a 0x00 0x00 0x00 0xda 0xcc 设定中间限位
设定限位点
0x9a 0x9a
0x00 0x00
D3
本机频道高8位 b0 - b7 表示 9 - 16 频道
D4
电流
单位为0.01mA
D5
电压
单位为伏安
D6
转速
单位为RPM/分钟
D7
位置
100为合/上限位点0 电机停止
1 电机运行
b1:
0 没有设定行程
1 已经设定行程
b2:
0 无中间限位点1
1 有中间限位点1
D8
群 控上:
头码
D0 0x9a
ID
D1 0X00
停
0x9a
0X00
下
0x9a
0X00
频道低
D2 0x01 0x01 0x01
频道高
D3 0x00 0x00 0x00
命令类型
D4 0x0a 0x0a 0x0a
固定值 0X9A
0X00-0X63 (十进制:1-99)
二进制位对应频道: (8-7-6-5-4-3-2-1)
0x82
0x9a 0x09 0x80 0x00 0x0a 0x02 运行到中间限位点2
0x81
0x9a 0x09 0x80 0x00 0x0a 0x03 运行到中间限位点3
0x80
0x9a 0x09 0x80 0x00 0x0a 0x04 运行到中间限位点4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0-30000/10
40038
阀1启动延迟时间
72
读/写
0-30000/10
40039
阀1启动高电平时间
74
读/写
0-30000/10
40040
阀1启动低电平时间
76
读/写
0-30000/10
40041
阀2启动作用时间
78
读/写
0-30000/10
40042
阀2启动延迟时间
80
读/写
0-30000/10
阀2停止高电平时间
114
读/写
0-30000/10
40060
阀2停止低电平时间
116
读/写
0-30000/10
40061
阀3停止作用时间
118
读/写
0-30000/10
40062
阀3停止延迟时间
120
读/写
0-30000/10
40063
阀3停止高电平时间
122
读/写
0-30000/10
40064
阀3停止低电平时间
164
读/写
0-30000/10
40085
阀1提前B作用时间
166
读/写
0-30000/10
40086
阀1提前B延迟时间
168
读/写
0-30000/10
40087
阀1提前B高电平时间
170
读/写
0-30000/10
40088
阀1提前B低电平时间
172
读/写
0-30000/10
40089
阀2提前B作用时间
184
读/写
0-30000/10
40095
阀3提前B高电平时间
186
读/写
0-30000/10
40096
阀3提前B低电平时间
188
读/写
0-30000/10
40097
阀4提前B作用时间
190
读/写
0-30000/10
40098
阀4提前B延迟时间
192
读/写
0-30000/10
40099
阀4提前B高电平时间
累积量
12
14
读
累积量,单位:kg
40008
40009
参数
16
读
0:静电,0正常1报警
1:液位,0正常1报警
2:开始,0未装车1开始装车
3:0L1Kg
4:V1,0关闭1打开
5:V:2,0关闭1打开
6:V3,0关闭1打开
7:V4,0关闭1打开
8:V1回讯:0关闭1打开
9:V2回讯:0关闭1打开
10:V3回讯:0关闭1打开
40026
40027
40028
急停
54
读/写
40029
控制模式
56
读/写
0本地,1远控
40030
58
读/写
40031
60
读/写
40032
62
读/写
40033
64
读/写
40034
66
读/写
40035
站号
68
读/写
1~32
40036
69
为避免影响通讯速度,后面内容不建议读。
40037
阀1启动作用时间
70
124
读/写
0-30000/10
40065
阀4停止作用时间
126
读/写
0-30000/10
40066
阀4停止延迟时间
128
读/写
0-30000/10
40067
阀4停止高电平时间
130
读/写
0-30000/10
40068
阀4停止低电平时间
132
读/写
0-30000/10
40069
阀1提前A作用时间
134
读/写
0-30000/10
40075
阀2提前A高电平时间
146
读/写
0-30000/10
40076
阀2提前A低电平时间
148
读/写
0-30000/10
40077
阀3提前A作用时间
150
读/写
0-30000/10
40078
阀3提前A延迟时间
152
读/写
0-30000/10
40079
阀3提前A高电平时间
40018
34
40019
膨胀系数
36
读/写
0-200 /10000
40020
装车单位
38
读/写
0Kg1L
40021
大提前量
40
读/写
0-5000
40022
小提前量
42
读/写
0-70
40023
提前关泵
44
读/写
0-1000
40024
流量系数
46
读/写
0-60000/100
40025
密度
48
读/写
0-20000 /10000
194
读/写
0-30000/10
40100
阀4提前B低电平时间
196
读/写
0-30000/10
40043
阀2启动高电平时间
82
读/写
0-30000/10
40044
阀2启动低电平时间
84
读/写
0-30000/10
40045
阀3启动作用时间
86
读/写
0-30000/10
40046
阀3启动延迟时间
88
读/写
0-30000/10
40047
阀3启动高电平时间
90
读/写
0-30000/10
40048
阀3启动低电平时间
11:V4回讯:0关闭1打开
12:装车未完成现场断电位,1为发生
40010
控制模式
18
读
0本地1远程
40011
40012
通讯密码
22
读
40013
压力
24
读
/1000MPa
40014
设定量写入
26
28
写
单位:kg
40015
40016
密码验证
30
写
0平时状态,1正确,2错误
40017
清零
32
写
0/累积1/清零
通讯协议
RCM-T2控制仪采用标准MODBUS-RTU通讯协议,协议采用主从方式,只有主站发出查询时,从站才能相应主站;从站只相应对其单独发出的指令,对于广播信息,从站只接收,而不向主站相应命令。
MODBUS通讯协议传输方式
RCM-T2控制仪,串口通讯参数:1位起始位,8位数据位,无校验,1位停止位,波特率:9600,采用RTU通讯方式。
读/写
0-30000/10
40070
阀1提前A延迟时间
136
读/写
0-30000/10
40071
阀1提前A高电平时间
138
读/写
0-30000/10
40072
阀1提前A低电平时间
140
读/写
0-30000/10
40073
阀2提前A作用时间
142
读/写
0-30000/10
40074
阀2提前A延迟时间
144
92
读/写
0-30000/10
40049
阀4启动作用时间
94
读/写
0-30000/10
40050
阀4启动延迟时间
96
读/写
0-30000/10
40051
阀4启动高电平时间
98
读/写
0-30000/10
40052
阀4启动低电平时间
100
读/写
0-30000/10
40053
阀1停止作用时间
102
读/写
0-30000/10
154
读/写
0-30000/10
40080
阀3提前A低电平时间
156
读/写
0-30000/10
40081
阀4提前A作用时间
158
读/写
0-30000/10
40082
阀4提前A延迟时间
160
读/写
0-30000/10
40083
阀4提前A高电平时间
162
读/写
0-30000/10
40084
阀4提前A低电平时间
RCM-T2控制仪地址列表
地址
功能
对应
属性
描述
40001
运行状态
00
读
61:密码验证
62:未装车;
64:装车完成;
65:装车暂停;
66:正在装车;
67:装车准备;
40002
设定量
02
Hale Waihona Puke 04读单位:kg40003
40004
已装量
06
08
读
单位:kg
40005
40006
流速
10
读
/100,kg/s
40007
40054
阀1停止延迟时间
104
读/写
0-30000/10
40055
阀1停止高电平时间
106
读/写
0-30000/10