基于内模控制策略的自整定PID控制器_何承波[1]
基于内模法的PID控制器自整定算法

Abs t r ac t :I n o r d e r t o s o l v e t he t ur ni ng p r o b l e m o f PI D c o n t r o l l e r pa r a me t e r s , a n a u t o ma t i c t u ni n g me t h o d b a s e d o n
XI A Ha o .L I Li u l i u ( C o l l e g e o f C o n t r o l S c i e n c e a n d E n g i n e e r i n g ,D a l i a n U n i v e r s i t y f o T e c h n o l o g y ,D a l i a n L i a o n i n g 1 1 6 0 2 3 ,C h i n a )
在无输入扰动时可提 高2 0 %左右 , 在有输入扰动时可提 高 1 0 %左右。仿 真结果表 明: 在用单位阶跃 信号激励 系统时 , 提 出的整定方法在保证 了系统鲁棒 性的前提 下 , 提 高了系统的瞬 态响应速度 , 并有效抑制 了系统输 出的超调。
关键词 : 内模 控 制 ; 系统 辨 识 ; 比例 一 积 分一 微分控制 ; 自整 定
基于内模的过热汽温串级控制系统PID参数整定
收 稿 日期 :2016—03—25
影 响过 热器 出 口蒸汽温度变化的 因素很 多 ,如蒸汽流量 (负荷)、给水温度 、给水流量 、过量空气系数 、烟气温 度、减温
—
86 一
水流量 、燃料 量 、燃料种 类 、受热面 污染情况 、火焰 中心 位置
ABSTRACT:A PID controller design method (IMCPID)f or superheated steam temperature cascade control system
based on the internal m odel principle is presented. The presented PID controller is very simple,in which only one
PID param eter setting of superheated steam tem perature cascade control system Based on internal m odel Principle
HU W en—bin .HAN Pu .LIU M iao (1.Guangdong Yudean Group Co.,Ltd.,Guangzhou Guangdong 5 10630,China;
1 引 言
PID控制器是工业过 程中最 主要使 用的一种 调节器 ,它 结构 简单 ,易 于操 作 ,且鲁棒 性强 ,实用 效果很好 ,但 对其 参 数 的调节却 没有 那么简单。
文献 [2]提 出一 种基 于谱 离 散方 法 的 PID参 数整 定方 法 。该方法 不需 要对多 重时 滞对 象进行 模型 约简 即可进 行 整定 ,简单方便 ,整定效 率高 。文献 [3]提 出了一种 自适 应 遗 传算 法的 PID参 数整定算法 ,通过 自适应 遗传算法 对 PID 参数进 行整定与寻优。文献 [4]提 出了一种新 的分数 阶微 积 分数字 实现算法一最 优 Oustaloup数字 实现 ,该算 法 在频 率 段 内能更高精度的实现分数 阶微积分 。文献 [5]针对一 大类 开环稳 定的最小和非最小相位系统 ,给 出了一 种 PID控 制器 参数整定的新方法 。本文讨 论 的基 于内模原 理 的 PID控 制
基于内模法的PID控制器自整定算法

基于内模法的PID控制器自整定算法作者:夏浩李柳柳来源:《计算机应用》2015年第09期摘要:为解决传统工业控制中比例积分微分(PID)控制器参数整定的问题,提出了一种基于内模法(IMC)以及系统辨识的控制器参数确定算法。
该方法首先利用被控过程在开环阶跃信号激励下,输入与暂态输出的对应关系,将被控对象辨识为一阶加滞后(FOPDT)或二阶加时滞(SOPDT)的模型;再利用IMC算法确定控制器的参数。
对于在内模法中引入的滤波器参数λ的确定问题,提出通过引入γ和σ两个参数,并与输出误差的平方建立关系来确定λ 的方法。
仿真显示,对于输出误差绝对值之和(IAE)这个指标,该种算法与传统基于IMC的PID 控制算法相比,在无输入扰动时可提高20%左右,在有输入扰动时可提高10%左右。
仿真结果表明:在用单位阶跃信号激励系统时,提出的整定方法在保证了系统鲁棒性的前提下,提高了系统的瞬态响应速度,并有效抑制了系统输出的超调。
关键词:内模控制;系统辨识;比例积分微分控制;自整定0 引言控制器在工业生产过程中发挥了重要作用,传统的比例积分微分(ProportionalIntegralDerivative, PID)控制器由于其自身易设计、易调节、易应用的特点,受到了广泛的应用。
然而,随着工业过程的日渐现代化,传统PID控制器与智能控制的结合受到了广大研究人员的青睐,智能PID控制包括模糊PID控制器、神经网络PID控制器、遗传算法PID控制器[1]及基于内模法(Internal Model Control, IMC)的IMCPID控制器[2]等。
IMCPID控制器针对大纯滞后系统具有良好的鲁棒性和随动跟踪控制性能,且只需要调节该控制器的一个参数就可以达到期望的闭环响应。
针对基于IMC的PID控制器设计,许多文献针对特定的问题都提出了一些新的控制方法或调谐策略。
例如,当被控对象模型中存在纯积分环节时,文献[3]提出基于频率响应匹配的PID控制器参数设计方法,文献[4]提出了通过将纯积分环节近似为具有大时间常数的一阶滞后环节。
论文基于内模控制的PID在过程控制中的应用研究

论文基于内模控制的PID在过程控制中的应用研究毕业设计报告(论文)基于内模控制的PID在过程控制中的应用研究所属系化工与制药工程系专业化学工程与工艺学号06110341姓名王大林指导教师陈夕松起讫日期2014.1---2014.5设计地点东南大学四牌楼校区动力楼119东南大学成贤学院毕业设计报告(论文)诚信承诺本人承诺所呈交的毕业设计报告(论文)及取得的成果是在导师指导下完成,引用他人成果的部分均已列出参考文献。
如论文涉及任何知识产权纠纷,本人将承担一切责任。
学生签名:日期:基于内模控制的PID在过程控制中的应用研究摘要内模控制是基于过程数学模型而进行控制器设计的一种新型控制策略。
内模控制具有很多优点,如设计简单,控制性能好,性能分析优越等。
随着工业过程自动化的普及,过程控制越来越受到控制界的广泛关注。
内模控制就是其中之一,它是以控制内部数学模型为基础,通过控制内部模型来达到控制整个系统稳定,进而达到工业过程生产指标的要求。
所以内模控制不仅是一种先进的控制算法,而且是研究预测控制模型的控制策略的重要理论基础!本论文基于东南大学过程控制实验室HGK-1型过程控制实验平台,以该平台中的液位过程为研究对象,设计基于可编程序控制器(PLC)的过程控制系统,采用内模控制(IMC)算法,仿真并实验研究IMC在该过程中的应用效果。
通过本次学习掌握IMC原理及算法,为以后在工作中的工程实际应用打下良好的铺垫!论文在介绍了HGK-1型过程控制实验平台后,阐述了液位过程建模的方法和特点。
在机理建模,试验建模和混合建模中选用试验建模方法建立了被控过程的数学模型。
设计液位过程PLC控制系统,包括液位计、流量计、调节阀、PLC输入/输出模块的接线,以及与PC机间的通讯连接。
仿真比较了IMC-PID控制及IMC的动态与静态性能。
为进一步提高控制系统的动静态性能,设计采用串级IMC控制方案,既提高了系统的动态特性,又保证了系统的稳态精度。
一种自校正PID控制器的建模与仿真

一种自校正PID控制器的建模与仿真李荃;吴翔;夏洪【摘要】把自校正控制原理与传统PID控制算法相结合,以传统PID控制器为基础,推导出了一种用递推最小二乘法的算式对PID参数进行整定的方法。
仿真结果表明,该方法法能较好地对PID控制系统进行参数估计,克服了传统算法需处理较大数据量,不利于参数实时在线估计等问题,增强了控制系统对被控对象的自适应能力。
该算法兼有传统PID控制和自校正控制的优点,是一种原理简明,收敛较快的控制器。
【期刊名称】《电子制作》【年(卷),期】2015(000)004【总页数】2页(P46-47)【关键词】自校正控制;PID控制;最小二乘法【作者】李荃;吴翔;夏洪【作者单位】东华理工大学江西省新能源工艺及装备工程技术研究中心江西南昌330013;东华理工大学江西省新能源工艺及装备工程技术研究中心江西南昌330013;东华理工大学江西省新能源工艺及装备工程技术研究中心江西南昌330013【正文语种】中文【中图分类】TP273传统控制方法较为适于线性定常系统。
实际工程应用中,很多被控对象或过程是时变系统。
在工况和条件改变后,系统的的结构参数会产生变化。
传统的控制算法对时变系统往往达不到很好的控制效果。
为此需要能够自动补偿模型在参数、输入信号方面的难于预知的变化。
这就是自适应控制的任务。
而自校正控制是其中重要的一种。
自校正控制在1958年由R.Kalman提出,但由于当时的计算机技术条件,没有付诸实现。
1973年K.J.Astrom和B.Wittenmark提出了一种自校正控制器实现方案,较好地解决了对非线性,变工况被控对象的控制,因而得到广泛的应用。
近年来自校正控制的研究与应用得到较快发展,出现了多种控制算法和辨识算法。
如文献[2]采用了自校正模糊控制策略解决多变量非线性控制问题;文献[3]提出了基于遗传算法(GA)的自校正PID用于化工过程温度控制;文献[4]提出了一种改进的基于最小方差的自校正控制算法,其对于最小相位系统和非最小相位系统都具有良好的适用性。
基于IMC内模控制算法自适应优化系统整定PID参数调节再热汽温

图3 优化后PID曲线
将基于IMC内模控制算法自适应优化系统用于火电厂再
热汽温调节系统的PID参数优化,使得系统具有优良的调节
使再热汽温控制的两种方式(燃烧器摆角和减温水控制)
之间达到平衡,使再热汽温既能保持稳定同时最大限度的减
少减温水使用量,既节省了人工整定PID参数的大量精力,
消除了因整定效果不佳而造成的系统振荡等危险因素。
目前
通过运用该系统已使再热汽温稳定运行在±3℃以内,同时通
过限制燃烧器摆角的动作速率和动作幅度,在尽可能少的影
响炉膛燃烧的情况下,减少了相同工况下,再热汽温达到稳
定所需部分减温水量,可在此基础上继续提高这种交叉控制
方式的稳定性和经济性。
参考文献
锦廉. 基于改进量子粒子群算法的火电厂再热汽温调节系统
参数自整定[J]. 机电信息,2020(8):5-6.
南,张玉艳,迟新利.基于变参数PID的火电厂过热汽温控制
沈阳工程学院学报(自然科学版),2008(2):150-152.
图2 优化前PID曲线。
基于内模原理的PID控制器参数整定仿真实验
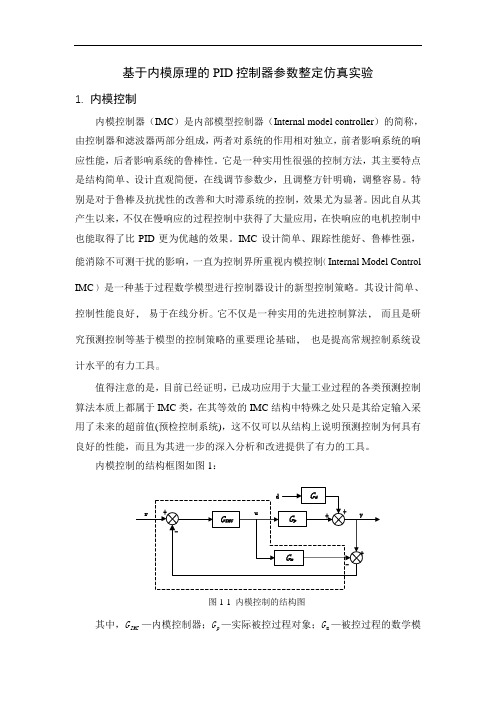
基于内模原理的PID 控制器参数整定仿真实验1. 内模控制内模控制器(IMC )是内部模型控制器(Internal model controller )的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。
它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。
特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。
因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID 更为优越的效果。
IMC 设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视内模控制( Internal Model Control IMC ) 是一种基于过程数学模型进行控制器设计的新型控制策略。
其设计简单、控制性能良好, 易于在线分析。
它不仅是一种实用的先进控制算法, 而且是研究预测控制等基于模型的控制策略的重要理论基础, 也是提高常规控制系统设计水平的有力工具。
值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC 类,在其等效的IMC 结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。
内模控制的结构框图如图1:图1-1 内模控制的结构图其中,IMC G —内模控制器;p G —实际被控过程对象;m G —被控过程的数学模型; d G —扰动通道传递函数。
(1)当0)(,0)(≠=s G s R d 时,假若模型准确,即)()(s G s G m p =,由图可知,)]()(1)[()]()(1)[()(IMC IMC s G s G s G s G s G s G s Y m d d -=-=p ,假若“模型可倒”,即)(1s G m 可以实现,则可令)(1)(IMC s G s G m =,可得0)(=s Y ,不管)(s G d 如何变化,对)(s Y 的影响为零。
基于内模原理的PID控制器参数整定
1s1??从以上内模pid整定步骤可以看出整个整定过程中只有滤波器时间常数是需要调整的参数所以控制器的参数比例增益积分时间和微分时间都与滤波器时间常数有关而且随着的增大kc和td都将趋向于零而积分时间ti将接近于过程模型时间常数tp这些可有上面得到的公式看出
基于内模原理的PID控制器参数整定
导师:朱翔鸥教授 报告人:邱伟 专业:电气装备信息化 学号:16451187196
简介
内模控制方法是Garcia和Morari于1982年首先正式提出,以其简 单、跟踪调节性能好、鲁棒性强、能消除不可测干扰等优点,为控 制理论界和工程界所重视。1989年Morari透彻研究了内模控制的鲁 棒性和稳定性,并且由其他学者推广到非线性系统,蓬勃发展中的 神经网络也引入到内模控制中。内模控制还和许多其它控制方式相 结合,如内模控制与模糊控制、内模控制和自适应控制、内模控制 和最优控制、预测控制的结合使内模控制不断得到改进并广泛应用 于工程实践中,取得了良好的效果。
+
+ +
d1(s)
y(s)
-
内模控制的基本结构框图如图 所示。GIMC内模控制器;Gp为过 程;Gm为过程模型;Gd为扰动 通道传递函数。通过求取参考输 入量r和扰动输入d与过程输出y之 间的传递函数,易得出系统的闭 环响应为:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为继电自整定参数后采用 Z - N 方法 ,曲线 3 为基 于 IMC 的 PID 控制方法 (对象的参数已给定) ,曲线 4 为基于 IMC 的继电自整定 PID 控制 (对象参数由 实验给定) .
通过图中的阶跃响应曲线我们可以清楚的看 出基于 IMC 的 PID 控制器的效果明显优于普通的 PID 控制器 ,超调量减小 ,调整时间也相应减少. 采 用继电自整定方法得出的 PID 控制器在性能上也 有一定的改善.
号都等效地表示为扰动信号 d ( t) , Gm ( s) 为对象
模型 ,而 G+ ( s) 为 Gm ( s) 的近似逆模型 ,假设模块
Gf ( s) 为低通滤波器 ,一般我们可以选择 Gf ( s) 为
Gf = 1/ (1 + Tf s) ,其中 Tf 可以自由地选择 (但当 Tf
的值增大时 ,响应的速度可能减小) ,在一般条件
通过 Ziegler-Nichols 经验整定公式确定 PID 控制器
的参数 :
Kp = 0. 6 Kc = 1. 6 TI = 0. 5 Tc = 7. 0
TD = 0. 125 Tc = 1. 77
(9)
(3) 基于 IMC 的 PID 控制器的参数整定为 :
Kp = 0. 9 , TI = 4. 5 , TD = 1. 11. (一阶纯滞后近似 的参数给定) .
设计出基于 IMC 的 PID 控制器. 以往要想求出系统
的这些特征参数 ,需要使用离线的方法来进行 ,且
在实际的过程控制系统中 ,有大量的对象模型可以 近似地由这样的带有延时的一阶传递函数来表示. 通过临界增益和振荡频率求出一阶纯滞后近似的 3 个参数 ,便可以进行内模控制.
2 仿真结果
系统的参数发生变化 ,则应该再重复这一过程. 而 继电型 PID 自整定控制克服了这个缺点[5] ,在这里 便提出了基于内模控制的继电自整定 PID 参数调 节器.
调节模态进行控制. 由于实际对象的模型并不容易
确定 ,控制过程也易受环境的干扰 ,一般方法难达
到满意效果 ,而继电自整定方法需要预先设定的参
数就是继电特性的参数 ,简单 、可靠[3] .
内部模型控制器 (internal model controller ,简称
IMC) 的典型结构如图 1 所示.
在此系统结构下 ,作用在系统上的所有扰动信
度的一半.
这时 系 统 发 生 振 荡 的 条 件 可 以 写 成 1 +
N ( A) G( s) | s = jwc = 0 即
G( jωc)
=-
1 N ( A)
(6)
Kp
=
1. 2 T KL
= 0. 96 TI
= 2L
= 10
TD = 0. 5L = 2. 5
(8)
(2) 用继电型自整定的方法求出 Kc ,ωc , 然后
设该等式的实部和虚部均等于 0 ,则可以得出振荡 频率和增益. 在这里 ,只考虑一种简单的情况 ,假设
(4) 用继电型自整定的方法求出 Kc ,ωc , 得到 带延迟的一阶近似参数 ,然后用 IMC 方法确定 PID
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
(2) 对象特性变化对控制效果的影响. 在确定 控制算法后改变对象参数 ,观察参数变化对控制效 果的影响. 图 3 (a) 是基于 IMC 的继电自整定方法 中改变 K 的情况 , 分别为 0. 5 K , K ,2 K ,2. 5 K. 图 3 (b) 是直接用 Z - N 的方法整定出 PID 参数后改变 K 的情况.
,通
过下面的 4 种途径得出控制器的 PID 参数 :
(1) 直接通过 Z - N 法求出 PID 参数
系来进行近似的一种有效分析方法. 由描述函数理 论可知 ,带回环的继电非线型环节特性的描述函数 可以表述为
N (A)
=
4d πA2
(
A2 - ε2 - εj ) ( A ≥ε) (5)
式中 : A 为正弦波幅值 ; d 为回环幅值 ;ε为回环宽
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
第 2 期
何承波等 :基于内模控制策略的自整定 PID 控制器
109
图 1 内模控制原理
关键词 :内模控制 ;继电自整定 ;鲁棒性 ;纯滞后 ;PID 控制器 中图分类号 :TP 13 文献标识码 :A
在工业控制中 ,许多实际对象不容易建立起系 统的模型 ,采用传统 Z - N 法整定参数又有产生增 幅振荡的危险. PID 自整定调节器的设计目的是使 校正调节器参数的工作自动化 , K. J . Astrom 提出了 在继电反馈下观测被控过程的极限环振荡 ,过程的 基本特征可由极限环的特征确定 ,然后算出 PID 调 节器的参数 ,该法是受控振荡 ,克服了传统Z - N法 的缺点[1 ] .
17. 65 9. 03 6. 45 5. 174 3 4. 785 6 4. 345 6
在数据上运用曲线的最小二乘拟合方法求出 L 和
Tc 的关系可近似为
Tc
=
3. 390 9L , T
=
Kc Tc 6. 764
K
通过这样的方法进行多次仿真实验后可近似
得到两组参数间的关系 L
=
2
Tc
~
4
,
T
=
Kc Tc
=
1 + sT ks ( L + Tf)
(2)
如果对象模型可以近似成 G( s) = ke - Ls/ (1 + Ts) ,
对时间延迟采用一阶近似[4] ,得到 Gm ( s) 模型为
收稿日期 :2001 - 05 - 30 作者简介 :何承波 (1977 - ) ,男 ,湖北仙桃人 ,硕士研究生 ,从事电力电子与电力传动方面的研究.
第 35 卷第 2 期 2002 年 4 月
武汉大学学报 (工学版) Engineering Journal of Wuhan University
文章编号 :1006 - 155X(2002) 02 - 108 - 05
Vol. 35 No. 2 Apr. 2002
基于内模控制策略的自整定 PID 控制器
确定系统的振荡频率与临界增益有多种办法 , 比较常用的有描述函数方法[6] ,此方法实际上是根 据非线性环节输入与输出信号之间的基波分量关
下面用一个例子说明采用不同的整定算法后 PID 控制的差异.
假设对象模型为一个带有延迟的一阶近似的
传递函数 G( s)
=
2
0 s
.5 +
1e
-
5
s
(大纯滞后系统)
L
=
1 4
Tc T
=
Kc Tc 8
K
(10)
为进一步验证参数关系 ,我们进行仿真实验后得到
以下一组数据 ,见表 1 ( K , T 都给定 , K = 0. 416 7 ,
T = 2. 3) .
表 1 仿真实验数据表
参数 L 参数 Tc 参数 Kc
0. 5
1
1. 5
2
2. 5
3
1. 918 3. 837 3 5. 509 6 7. 163 8. 395 9. 59
下 ,可以由下式得出内部模型控制器为
Gc ( s)
= 1-
Gf ( s) Gm+ ( s) Gf ( s) Gm+ ( s) Gm
(1)
选择对象模型为 Gm ( s) = k/ (1 + Ts) ,则我们可以
写出其逆模型为 Gm+ ( s)
=
1
+ k
sT ,
从该式中我们
可以设计出 PI 控制器为
Gc ( s)
1 10
武汉大学学报 (工学版)
2002
控 制 器 的 参 数 : Kp = 0. 905 , TI = 4. 15 , TD = 1. 04 (对 象 一 阶 纯 滞 后 近 似 的 参 数 是 从 实 验 中 得到) .
其中临界增益 Kc ,振荡频率 ωc 与一阶纯滞后 近似模型参数 K , L , T 的对应关系由式 (8) 、式 (9) 得到 :
对于实际控制中的大纯滞后系统 ,采用常规 PID 控制效果欠佳 , Smith 预估器是一种有效的控 制方法 ,由于它对被控制对象参数的敏感性未能获 得广泛的使用 ,而内模控制克服了这些缺点 ,控制 回路具有良好的鲁棒性和控制性能 ,本文提出了基 于内模控制的自整定参数[ 2 ]调节器 .
1 内模自整定控制原理
图 4 (a) 是基于 IMC 的继电自整定方法中改变 T 的情况 ,分别为 0. 5 T , T ,2 T ,2. 5 T , 图 4 (b) 是直 接用 Z - N 的方法整定出 PID 参数后改变 T 的 情况.
从以上 3 组图可看出基于 IMC 的继电自整定 方法比直接的 Z - N 法鲁棒性能好 ,在对象参数发 生变化时 ,前者能保持控制稳定 ,调节效果良好.
继电自整定基本思想是 ,在控制系统中设置两 种模态 :测试模态和调节模态. 在测试模态下 ,由一 个继电非线性环节来测试系统的振荡频率和临界 增益 ;而在调节模态下 ,由系统的特征参数首先得 出 PID 控制器 ,然后 ,由此控制器对系统的动态性 能进行调节. 如果系统的测试发生变化 ,则需要重 新进入测试模态进行测试 ,测试完成之后 ,再回到
Gm ( s)
=
Ts
k +1