机械动力学大作业
机械动力学大作业

曲柄连杆机构的建模与仿真
曲柄连杆机构如图1所示,曲柄AC长90mm,OC距离300mm。
计算β=300时曲柄的v、θ、θ’。
1-1仿真测试
通过ADAMS/View建立的如图1-1-1所示的模型:
图1-1-1曲柄连杆模型
(1)在工具栏中单击仿真控制按钮。
(2)系统打开参数设置对话框,设置为Forever,Steps为0.01,如图1-1-2所示。
图1-2运动仿真
(3)点击开始仿真图标
(4)模型开始运动。
如果曲柄逆时针转动,对旋转运动(Motion_1)单击鼠标右键,选择Modify,在Function(time)一栏的数据前面加上“-”。
开始仿真。
1-2测试仿真结果
(1)在ADAMS工具菜单的Measure中选择,在To Point栏中输入PART3,即曲柄;
(2)在Characteristic栏中选择Translation velocity 以测其速度。
(3)选择Cylindrical坐标系,并选择R选项。
(4)设置完毕单击Apply按钮,弹出测量窗口如图1-2-1曲柄连杆运行一周的速度分量图。
图1-2-1 qubingliangan 测量曲线
(5)重复((1)~(3)步再测量节点2、3沿Y轴方向的速度分量,测量结果如图1-2-2:
图1-2-2 qubingliangan2、3测量曲线。
机械动力学大作业
机械动力学大作业
一、问题及要求
建立单自由度杆机构(有无滑块均可)动力学模型,由静止启动,选择一个固定驱动力矩,绘制原动件在一周内的运动关系线图,具体
机构及参数自拟。
、建立模型
建立如图一所示机构:已知驱动力矩M=20Nm阻力矩M=10 Nm 杆1长120mm转动惯量为J i=0.16kgm2 ;杆3质量为1kg,转动惯量为
j3=0.16kgm2;杆2质量、转动惯量忽略,其他参数如图所示。
求:建立系统运动方程。
二、求解过程
M3图一
方法:利用等效力学模型法进行动力学分析
解:取杆1为等效件,有
f w3
M v= Mi - M3—(1)
jv=ji+02+j3)(—y ⑵
< XWj/
w3120 3
—二—=一=0.75 Wi 160 4
又有(2)可知J V为常数则可知:
Ki
M v=J v i
则错误!未找到引用源。
四、采用ADAMS软件或Matlab/Simulink 环境,建立机械系统的动力学模型,借助软件进行求解计算和结果分析。
(1)利用Adams软件,建模后如图:
图2
图3
(2)当杆1由图1所示位置开始运动一周,机构运动时间为0.03秒, 利用Adam漱件分析杆件1角加速度错误!未找到引用源。
随时间的变化关系图,如图4所示:
图 线系关动运的内周一在件动原
4
图
uoqB 」曰|总3。
\/」e[n6uv
0/SS3
y
s s C6唾
二 N 2
I 」善E。
机械动力学大作业

单自由度杆机构的Adams动力学仿真摘要:文章分析了单自由度的铰链机构的动力学问题,已知原动件曲柄的转矩,绘制输出件摆杆的运动曲线。
首先在Adams软件中构造连杆,添加三个连杆,使其成一定角度,相互连接。
再在两杆之间添加转动副,并且头尾连杆与地相连。
并在曲柄处加转矩,最后进行仿真,并绘出相应图表。
关键词:铰链机构;Adams仿真1、机构模型的建立根据题目要求,选择一个铰链四杆机构——曲柄摇杆机构为模型,其结构简图如图1所示。
其中,曲柄1为原动件。
图1曲柄摇杆机构简图在Adams软件中,建立该曲柄摇杆机构的模型如图2所示。
图2 Adams中的曲柄摇杆机构模型曲柄摇杆机构各连杆的惯性参数参考表1。
杆件的材料均选择钢材(密度ρ=7.801×10-6 kg•mm-3,杨氏模量E=2.07×105 N•mm-2,泊松比μ=0.29)。
表1 传动导杆机构各部件惯性参数2、利用Adams软件添加约束和力矩杆1和地之间有转动副,杆1和杆2、杆2和杆3之间有转动副,杆3和地之间有转动副。
杆1为原动件,在杆1上添加转矩。
转矩大小为30。
图3约束与转矩3、进行仿真点击仿真按钮,开始仿真,选择仿真时间为2s,可以观察到该机构各个时间的运动状态如图4和图5所示。
(a)T=0时刻(b)T=1时刻图4仿真过程中机构模型的运动状态(a)T=1.2时刻(b)T=2时刻图5仿真过程中机构模型的运动状态结论当原动件曲柄的转矩取为30时,点击“后处理”,可以绘制出输出件摆杆的位移曲线、角速度曲线、加速度曲线分别如图10、图11和图12所示。
图10输出件摆杆的位移曲线图11输出件摆杆的角速度曲线图12输出件摆杆的角加速度曲线参考文献[1]陈立平,张云清,任卫群.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社.2005.。
机械动力学作业
仿真运动结束后的如图1-5所示。
图1-5仿真运动结束后的图
建立测量(滑块的位移、速度、加速度)
1)鼠标右键单击需要测量的部件,系统打开右键快捷菜单,选择Measure;
2)系统打开参数对话框,将Characteristic设为CM Position,Component设为X,测量X向位移;
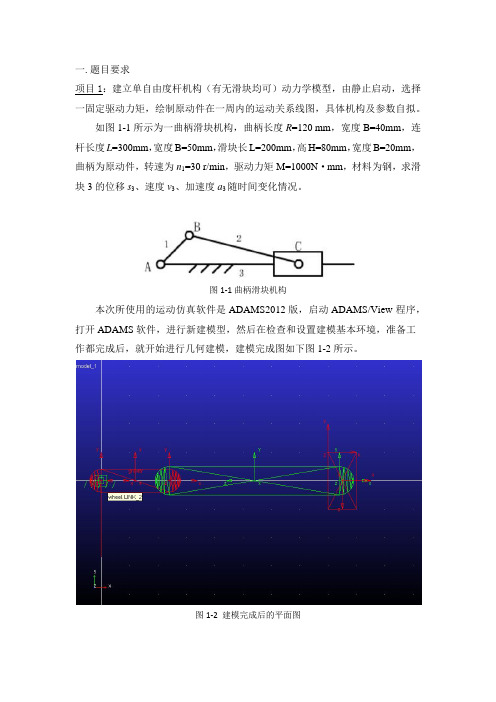
图1-1曲柄滑块机构
本次所使用的运动仿真软件是ADAMS2012版,启动ADAMS/View程序,打开ADAMS软件,进行新建模型,然后在检查和设置建模基本环境,准备工作都完成后,就开始进行几何建模,建模完成图如下图1-2所示。
进行施加运动副和驱动,施加铰接副,在曲柄同地面框架连接,和曲柄连杆之间的连接,以及在连杆和滑块上处通过铰接副将连杆和滑块连接。滑块和地面也要进行棱柱副连接。运动副施加完成后的图,如图1-3所示。
3)点击Apply,出现空白的测量窗口;
4)重复上述步骤,将Characteristic设为CM Velocity,新建测量速度;
5)重复上述步骤,将Characteristic设为CM Acceleration,新建测量加速度;
测量后测得结果如图1-6,1-7,1-8所示。
图1-6滑块位移图
图1-7滑块速度图
图1-3运动副施加完成后的图
定义曲柄的运动
①在主工具箱的运动工具集,选择旋转运动工具图标 ,显示定义旋转运动对话框;
②在Set up栏,输入360;选择JOINT_1,完成转速设置。
定义曲柄运动后,如图1-4所示。
图1-4定义曲柄运动
对曲柄滑块机构进行仿真分析
1)仿真分析
机械原理课程大作业
机械原理课程大作业基于MATLAB平面连杆机构运动学和动力学分析指导老师:王玉丹目录作业一:平面连杆机构运动学分析第2页作业二:平面连杆机构动力学分析第15页作业一L(AE)=70mm,L(AB)=40mm,L(EF)=60mm,L(DE)=35mm,L(CD)=75m m,L(BC)=50mm,原动件以等角速度W1=10rad/s回转。
试以图解法求在θ1=50°时C点的速度和加速度.对机构进行运动分析,写出C点的位置、速度及加速度方程。
解题过程:令AB=r1, BC=r2, CD=r3, DE=r4,AE=r6,EF=r8, AF=r7,角EAF=θ1。
分析:对机构进行位置分析由封闭形ABCDEA可得:r1+r2=r6+r3+r4 (1)由封闭图形AEFA可得:r7=r6+r8 (2)将(1)(2)两式整理可得:r2-r3-r4=-r1+r6-r8+r7=r6【一】(1)位置方程:【二】速度方程:【三】加速度方程:【四】根据位置方程式编制如下函数:【五】进行数据输入,运行程序进行运算。
根据上面分析的θ1 的极限位置取θ1 的范围为40°-55°并均分成15个元素:输出的P、矩阵的第二列到第四列分别是θ2 、θ3 、4θ4 的值,第一列是AF杆的长度r1’。
【六】第二步根据速度方程式编写如下函数:根据第一步得到的数据进行数据输入,运行程序计算各速度值。
程序如下:程序运行得到q矩阵,第一行到第三行分别是a2、a3、a4 的值,第四行是杆AF上滑块运动的速度,即F点的速度。
【七】第三步编写加速度计算函数:【八】根据第一步和第二步输入数据,运行程序得到各加速度的值:【1】计算C点在θ1 =55°,w1 =10rad/s时的速度,加速度:总结数据绘出各构件的位置、速度和加速度的表格如下:【2】输出图像1)角位置程序及输出的图像:2)F点速度程序及输出的图像:3)角加速度程序及输出的图像:4)F点的加速度程序及输出图像:作业二在图示的正弦机构中,已知:L(AB)=100mm,h1=120mm,h2=80mm, W1=10rad/s(常数),滑块2和构件3的重量分别为,G2 =40 N 和G3 =100 N,质心S2 和S3 的位置如图所示,加于构件3上的生产阻力Fr=400 N,构件1的重力和惯性力略去不计。
机械系统动力学大作业

《机械系统动力学》课程作业小组成员:王凌飞 20150702081t王毅 20150702041 指导教师:***学院:机械工程学院专业:机械工程重庆大学机械工程学院二〇一五年十一月机械系统动力学大作业一、 问题描述图1为汽车结构简化模型:图1 汽车结构简化模型图2为汽车结构受力分析:图2 受力分析图已知22120.64m 4000kg 2000N s/m r m c c ====⋅121220000N/m0.9m1.4m k k l l ====r :车辆的回转半径。
初始条件为:0x x θθ====。
外部冲击力矩:)(10t δ。
试用MATLAB 中的ode45函数求解并画出0-5s 内的位移x 和转角θ的响应。
单位冲击函数()t δ的定义:1,()0,t t t δ=⎧=⎨≠⎩,其图像如图3所示。
00.511.5tδ图3 单位冲击函数图像二、求解过程1.系统运动方程不考虑冲击力矩,由图2机构受力分析得到系统运动方程如下:0)()()()(112221112221=-+++-+++θθk l k l x k k c l c l x c c x m (1) 0)()()()(222121112212122211222=++-+++-+θθk l k l x l k l k c l c l x l c l c x mr (2) 考虑t=0时刻,系统受到一个冲击力矩)(10t δ,此时运动学方程表示为:0)()()()(112221112221=-+++-+++θθk l k l x k k c l c l x c c x m (3) 222222211221122112211()()()()10()mr c l c l x l c l c k l k l x l k l k t θθθδ+-+++-++= (4)2.运动方程一阶常微分方程组形式令,,,,4321x x x x x x ====θθ 则t=0时:12212222114121221133422222422112221142211111223()/()/()/()/[10()/()()()]/x x x c c x m l c l c x m k k x m l k l k x m x x x l c l c x l c l c x l k l k x l k l k x mr =⎧⎪=-+---+--⎪⎨=⎪⎪=---+---+⎩ t>0时:12212222114121221133422222422112221142211111223()/()/()/()/[()/()()()]/x x x c c x m l c l c x m k k x m l k l k x m x x x l c l c x l c l c x l k l k x l k l k x mr =⎧⎪=-+---+--⎪⎨=⎪⎪=---+---+⎩ 3. MATLAB 程序求解运动方程ode45函数主程序文件solution.m ,如下所示: clc;clear;r=0.8; m=4000; c1=2000; c2=2000; k1=20000; k2=20000; l1=0.9; l2=1.4; t0=0; tf=5;x0=[0,0,0,0];[t,x]=ode45('f1',[t0 tf],x0); subplot(3,1,1) plot(t,x);subplot(3,1,2) plot(t,x(:,1)); subplot(3,1,3) plot(t,x(:,3));ode45函数微分关系函数文件f1.m ,如下所示:function xdot=f1(t,x) r=0.8; m=4000; c1=2000; c2=2000; k1=20000; k2=20000; l1=0.9; l2=1.4; t0=0; tf=5;xdot=zeros(4,1); xdot(1)=x(2);xdot(2)=-(c1+c2)/m*x(2)-(l2*c2-l1*c1)/m*x(4)-(k1+k2)/m*x(1)-(l2*k2-l1*k1)/m*x(3);xdot(3)=x(4); if t<=0xdot(4)=10/(m*r*r)-(c2*l2-c1*l1)/(m*r*r)*x(2)-(c2*l2*l2+c1*l1*l1)/(m*r*r)*x(4)-(k2*l2-k1*l1)/(m*r*r)*x(1)-(l1*l1*k1+l2*l2*k2)/(m*r*r)*x(3); elsexdot(4)=-(c2*l2-c1*l1)/(m*r*r)*x(2)-(c2*l2*l2+c1*l1*l1)/(m*r*r)*x(4)-(k2*l2-k 1*l1)/(m*r*r)*x(1)-(l1*l1*k1+l2*l2*k2)/(m*r*r)*x(3); end在MATLAB 中运行以上两个程序,即可得0~5s 内汽车系统的位移x 与转角θ的响应。
机械动力学-典型习题
1 k eq 1 k1 k 2 k eq m 1 k3
n
fn
2 6 1 .8 6 ra d / s
n
2
4 1 .6 8 H z
Machinery Dynamics
机械动力学
Raymond Ding ©
6.3 如图所示的系统,重物挂在弹簧上,静变形为δ s 。现
( t ) A n 2 sin n t y
n 2 f n
( t ) m ax A n g y
2
A
g
n
2
0 .0 1 m
Machinery Dynamics
机械动力学
Raymond Ding ©
6.2 如图所示的系统,m=2.5kg,k1=k2=2×105N/m,
Байду номын сангаас
将其重新挂在未变形弹簧的下端,并给予向上的初速度u0 ,求重物的位移响应和从开始运动到首次通过平衡位置 的时间。 y ( t ) A sin( n t )
n
k /m
g /s
y (t ) 0 s y (t ) 0 u 0
Machinery Dynamics
机械动力学
Raymond Ding ©
机械动力学习题课 Chapter A Exercises Analysis of Machinery Dynamics
Machinery Dynamics
机械动力学
Raymond Ding ©
6.1 一物体搁置在水平台面上。当台面沿竖直方向作频率
为5Hz的简谐振动,要使物体不跳离台面,试问对台面的 振幅有何限制? y ( t ) A sin n t
机械系统动力学作业

6
3)、工作辊有大质量差时
图 3-5 在上下工作辊有很大的质量和质量差下固有频率的变化趋势
图 3-6 在上下工作辊有很大的质量和质量差下上下工作辊的主振型差的变化趋势 以上两图是在 m3=30,m2 逐渐减小的情况下得到的,当上下工作辊有很大的质量并且有相对大的差 距时,这里只是对这种变化情况分析 f 和 dh 的变化趋势。由上图 3-5 和图 3-6 可知,在 f4 下,上下工作辊 振型有变化,但是还是维持在很大的高度情况;而在 f3 的情况下有较大的 dh 变化。
各阶振型的图形表示为:
第一阶
第二阶
第三阶
图 2-1 各阶主振型图示
4
第四阶
三、当各参数变化时的分析和优化 3.1 参数[k]和[m]变化对系统的影响
由(2.4)式可知影响固有频率 f 和各阶主振型的因素有[k]和[m]的变化引起,所以这只对这两种情况 进行 MATLAB 计算并画出图形来对比和分析各参数变化时对系统的影响。且影响轧件质量的只要是由上下 工作辊的上下振型差距(dh)决定的。
f2
f3
151.83
481.92
表 2-4 第二阶 -0.4947 -0.2159 0.4555 0.7079
各阶主振型 第三阶 -0.0763 0.7039 0.7019 -0.0778
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机电工程学院有限元分析及应用Ansys软件大作业
学号:S314070061
专业:机械工程
学生姓名:郭海山
任课教师:钟宇光
2014年12月18日
一.题目要求:
采用ADAMS软件或Matlab/Simulink环境,建立简单机械系统的动力学模型,借助软件进行求解计算和结果分析。
建立单自由度杆机构(有无滑块均可)动力学模型,由静止启动,选择一固定驱动力矩,,具体机构及参数自拟。
二.模型及结构分析:
利用ADAMS建立如下图1所示单自由度机构模型:
图1单自由度机构模型
结构简图如下图2:
图2 机构简图
曲柄1长度为24cm,质量为1.69kg
滑块2质量为15.6kg
导杆3长度为80cm,质量为5.19kg
部件的材料都是钢,
Material Density: 7.801E-006 kg/mm**3
三.建模:
1.启动adams/view,新建模型model_1。
单位设置成MMKS-mm,kg,N,s,deg。
存储位置设在桌面。
设置工作环境后,利用主工具箱里的基本建模工具,先后建立曲柄1、滑块2和导杆3。
2.曲柄和地面之间,曲柄和连杆之间,连杆和滑块之间,都是转动副。
滑块和地面之间是移动副。
在A,B,C分别放,再在B点添加进行约束。
3.现在给曲柄一个匀速转动。
其值如下图3所示:
图3
最后得到模型如下图4所示:
图4
四.仿真:
标签页 simulation.选择下面图标。
修改仿真时间参数如下图5:
图5
完成仿真观察机构运动状况。
图6为第0.97S时的仿真图像
图6
图7为第2.91S时的仿真图像
图7
图8为第8.24S时的仿真图像
图8
五.数据分析:
运用后处理命令查看个原动件曲柄1的位移,速度加速度随时间变化的图像。
1.原动件位移关系图9:
2.原动件速度关系图10:
图10原动件在x,y,z的速度关系3.原动件加速度关系图11:
图11 曲柄2的加速度变化沿X轴方向曲线
图12曲柄2的加速度变化沿y轴方向曲线
图13曲柄2的加速度变化沿z轴方向曲线。