总线收发器分析
全中文芯片资料TSS721A仪表总线收发器

仪表总线收发器
1、概述
TSS721A 是满足仪表总线标准(EN1434-3)的单芯片收发器,内部接口电路可以适应仪表总线 结构中主从机之间的不同电平,与总线的连接是无极性的,且支持使用光耦与从机间进行全电隔离。 芯片可由总线供电,对从机不增加功率需求,并内置总线电压故障指示。接收器有动态电平识别功 能,发送器有可编程电流沉。片内集成 3.3v 稳压源,当总线发生故障时将会延时关断。该电路广泛 应用于 M-BUS 远程抄表、安防、智能家居等领域。
第 4 页,共 9 页
650 μA
350 μA
0.5 μA
0.5 μA
3.4
V
5
Ω
6.4
4.3
V
7.5
2.4 mA
1.1
1.33 V
VSTC
V
1
MΩ
VBAT
0.6
V
0.9
3
s
QQ:37056373 V.1.0
TSS721A 仪表总线收发集成电路
注 2:输入端 RX/RXI 及输出端 TX/TXI 端悬空,ICC=ICI1+ICI2。 3.4 接收模块直流参数
2.2 引脚说明
引脚 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
符号 BUSL2
VB STC RIDD PF SC TXI TX BAT VS VDD RX RXI RIS GND BUSL1
功能描述 连接仪表总线 整流后总线信号端 外接电源维持电容 外接 CS1 电流值调节电阻 欠压指示输出端 外接采样电容 数据信号反相输出端 数据信号输出端 逻辑电平调整输入端 总线/电池供电模式切换输出端 稳压电源输出端 数据信号输入端 数据信号反相输入端 外接调制电流值调节电阻
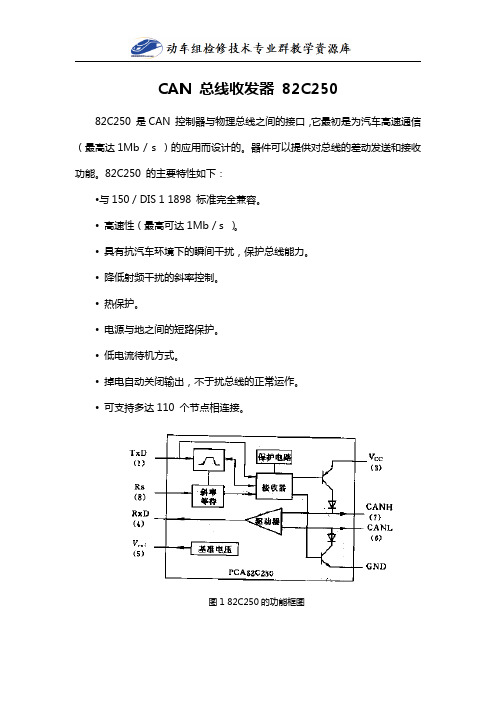
10CAN 总线收发器 82C250
Rs管脚上的强制条件
工作方式
Rs上的电压或电流
>0.75 Vcc
待机方式
<10μA
10μA< <200μA
斜率控制
0.4Vcc< <0.6Vcc
<0.3 Vcc
高速方式
— <500μA
在高速工作方式下,发送器输出晶体管以尽可能快的速度启闭,在这种方式下不采取任何措施限制上升和下降斜率。此时,建议采用屏蔽电缆以避免射频干扰问题的出现。选择高速工作方式时只需将图1 中的引脚8 接地即可。
则悬浮
若> 0. 75V则悬浮
隐性
X
对于CAN 控制器及带有CAN 总线接口的器件,82C250并不是必须使用的器件,因为多数CAN 控制器均具有配t 灵活的收发接口,并允许总线故障,只是驱动能力一般只允许20~30 个节点连接在一条总线上。而82C250 支持多达110 个节点,并能以1Mb / s 的速率工作于恶劣电气环境下。
• 具有抗汽车环境下的瞬间干扰,保护总线能力。
• 降低射频干扰的斜率控制。
• 热保护。
• 电源与地之间的短路保护。
• 低电流待机方式。
• 掉电自动关闭输出,不于扰总线的正常运作。
• 可支持多达110 个节点相连接。
图1 82C250的功能框图
表1 82C250基本参数
符号
参 数
条件
最小值
典型值
最大值
表3 82C250真值表
电源
TxD
CANH
CANL
总线状态
RxD
4.5 -5.5V
0
高电平
低电平
显性
CAN收发器解析讲课教案

8
输出
功能
共模稳压 输出
低电平CA N电压输 入/输出
高电平CA N电压输 入/输出
待机模式 控制输入
授人以鱼不如授人以渔
2. CAN收发器TJA1040
(1)正常模式 收发器通过总线CAN-H和CAN-L 发送和接收数据。 (2)待机模式 发送器和接收器都关闭,只用低 功耗的差动收发器监控总线。 (3)分解网络 分解网络为0.5VCC的直流稳压源, 只在正常模式中接通。 (4)唤醒 在待机模式中,总线由低功耗的差动 比较器监控。
— —
CAN⁃H、CAN ⁃L端子直流电压 ()/V
差动总线电压 (ΔV)/V
差动输入电压 (隐性值)()/ V
待机模式 0<<5.5V
V1=1V 非待机模式
— -8
1.5 -1.0
0.1 —
— —
授人以鱼不如授人以渔
最大值 5.5 70 14 0.17 18
3.0 0.4
(2)PCA82C250的结构
授人以鱼不如授人以渔
2. CAN收发器TJA1040
图3-53 TJA1040功能框图
授人以鱼不如授人以渔
符号 TXD
GND
2. CAN收发器TJA1040
表3-68 TJA1040端子功能
端子 1
2
功能
发送数据 输入
搭铁
符号 SPLIT
CAN⁃L
端子 5
6
3
电源电压 CΒιβλιοθήκη N⁃H 7RXD4
接收数据 STB
表3-64 PCA82C250基本性能参数
差动输入 非待机模式 1.0
—
电压(显性
值)()/V
传播延迟 高速模式
第11章LIN总线收发器TJA1020

第二节 总体描述
图11-6和图11-7是远程和本地唤醒旳时序图以及在引脚 RXD和TXD旳特定输出。假如LIN总线在一种隐形总线电 平之后旳显性电平至少连续tBUS,则能够经过LIN总线检测 到远程唤醒。假如低电平连续了至少tNWAKE,则NWAKE引 脚旳下降沿将引起本地唤醒。
一般斜率模式中,内部从机端电阻RSLAVE将LIN总线引脚拉 高。引脚INH旳电池高电平使外部电压调整器保持接通。
将引脚NSLP和TXD置高电平,并连续至少tgotonorm,max,也 能够进入一般斜率模式。当tgotonorm超时后会执行模式转换。 图11-8是从睡眠模式或准备模式转换成一般斜率模式旳时 序图。
上一页 下一页 返回
第三节 从机应用
假如没有本地唤醒源,则不需要外部上拉电阻。TXD不会被 TJA1020强下拉至低电平。假如TJA1020使用本地唤醒 特征,外部上拉电阻RTX要求旳上拉能力由下面旳条件定义:
①当发生本地唤醒事件时,集成旳唤醒源晶体管具有拉引脚 TXD到低旳驱动能力;
②TJA1020旳集成TXD下拉电阻RTXD。 单片机端口引脚旳能力以及上拉电阻RTX旳值能够用下面旳
第十一章 LIN总线收发器TJA1020
第一节 简介 第二节 总体描述 第三节 从机应用 第四节 主机应用
第一节 简介
LIN总线是一种低速旳(最高20Kb/s)A类串行总线协议。 LIN旳子总线能够用于像座椅、门、控制板和方向盘等模块。 它旳作用是将开关、执行元件和传感器从子总线连接到主总 线(如CAN总线)。
上一页 下一页 返回
第二节 总体描述
4.低斜率模式 假如LIN系统旳速率低于10Kb/s,能够使用低斜率模式。
它和一般斜率模式相比能够进一步降低(一般斜率模式中) 已经非常低旳EME。所以,它和一般斜率模式旳唯一不同点 式总线符号旳过渡时间。低斜率模式旳过渡时间是一般斜率 模式过渡时间旳两倍,如图11-9. 低斜率模式只能经过睡眠或准备模式进入,不可能直接从一 般斜率模式直接转换成低斜率模式。 当引脚TXD旳低电平和引脚NSLP旳高电平维持了至少 tgotonorm.max,TJA1020进入低斜率模式。当tgotonorm超时 后会执行模式转换。图11-10是从睡眠模式或准备模式转换 成低斜率模式旳时序图。
can总线收发器原理

can总线收发器原理CAN总线收发器原理CAN总线收发器是一种常见的电子元器件,被广泛应用于汽车、工业控制、航空航天等领域。
那么,CAN总线收发器是如何工作的呢?本文将以中括号内的内容为主题,详细介绍CAN总线收发器的工作原理。
一、什么是CAN总线收发器?CAN(Controller Area Network)总线收发器是一种用于在CAN总线上进行数据收发的集成电路。
CAN总线是一种串行通信协议,为控制器提供了一种在不同节点之间传递数据的方式。
CAN总线收发器充当了控制器和总线之间的接口,负责将控制器上的信息转换为CAN总线上的数据,并将总线上的数据转换为控制器可读取的信息。
二、CAN总线收发器的组成一般而言,CAN总线收发器由两个主要部分组成:发送器和接收器。
1. 发送器CAN总线发送器的主要作用是将控制器节点上的数据转换为CAN总线上的数据进行传输。
具体来说,CAN总线发送器将控制器节点上的数字信号转换为差分信号。
差分信号是指信号通过两个导线进行传输,并且每个导线上的电压相反,差值保持恒定。
这种传输方式能够提高抗干扰性能,使得CAN总线在工业环境等噪声干扰严重的环境下能够稳定传输数据。
在CAN总线发送器内部,数据信号经过一定的逻辑电路处理,被编码成差分信号。
此外,发送器还有一个核心组成部分是储存器,用于存储待发送的数据。
发送器会根据CAN总线通信协议的要求,按照一定的格式对待发送的数据进行分帧处理,生成符合CAN总线规范的数据帧,然后将数据帧转换为差分信号进行传输。
2. 接收器CAN总线接收器的主要作用是将CAN总线上的数据转换为控制器节点可读取的信息。
接收器负责接收差分信号,并将其转换为数字信号。
接收器内部的电路会对接收到的差分信号进行放大、滤波等处理,以确保接收到的数据能够准确可靠地被控制器读取。
与发送器类似,接收器内部也有一个储存器,用于存储接收到的数据。
接收器会根据CAN总线通信协议的要求,对接收到的差分信号进行解码和分析,提取出有效的数据,并存储在储存器中,待控制器节点读取。
双电源总线收发器 原理

双电源总线收发器原理双电源总线收发器原理双电源总线收发器是一种用于数据通信的设备,其主要功能是将来自不同电源的数据信号进行转换和传输。
在很多实际应用中,由于系统的需要,需要同时使用两个不同的电源,这时就需要使用双电源总线收发器来实现数据的传输。
双电源总线收发器的原理是基于信号转换和隔离技术。
当数据信号从一个电源传输到另一个电源时,由于两个电源的电压和地线可能存在差异,因此需要对信号进行转换和隔离,以确保数据的准确传输和保护电路的安全。
在双电源总线收发器中,通常采用隔离元件(如光耦)来实现信号的隔离。
光耦是一种将输入端和输出端通过光电转换的方式进行隔离的器件,其工作原理是通过输入端的光信号来控制输出端的电信号。
当输入端的光信号变化时,输出端会相应地产生电信号,从而实现输入信号到输出信号的转换和传输。
双电源总线收发器还需要考虑电压和地线的匹配问题。
由于不同电源之间的电压和地线可能存在差异,因此需要对信号进行电平转换和匹配,以确保数据传输的稳定性和可靠性。
一般情况下,双电源总线收发器会采用电平转换器和差分信号传输技术来解决这个问题。
电平转换器可以将一个电源的信号转换为另一个电源所需的信号电平,从而实现两个电源之间的信号匹配。
而差分信号传输技术则可以通过在传输线上同时传输正负两个信号,从而抵消电压和地线的差异,提高信号的抗干扰能力。
双电源总线收发器还需要考虑数据的同步和时序控制。
在数据传输过程中,由于两个电源之间存在时序差异,需要对数据进行同步和时序控制,以确保数据的正确性和完整性。
一般情况下,双电源总线收发器会采用时钟信号和同步信号来实现数据的同步和时序控制。
时钟信号可以提供一个统一的时序参考,而同步信号可以用来判断数据的开始和结束,从而实现数据的同步和时序控制。
双电源总线收发器是一种用于数据通信的设备,通过信号转换、隔离、电平匹配和时序控制等技术,实现了来自不同电源的数据信号的转换和传输。
它在很多实际应用中起着重要的作用,可以确保数据的准确传输和保护电路的安全。
4.3 CAN总线收发器TJA1054(第三讲)

受到保护。
(6)低电流的睡眠和待机模式,可以通过总线线路唤醒。
2 管脚功能描述
3 低功耗模式
上电 待机模式
正常模式
进入睡眠 模式
待机模式
睡眠模式
图中,模式10表示引脚/STB=HIGH,引脚EN=LOW。
4Байду номын сангаасTJA1054的应用
基于TJA1054的CAN网络节点
4.3 CAN总线收发器TJA1054
TJA1054 是控制器局域网(CAN)中协议控制器和CAN 物理总线之间的接口。
这个器件提供差动的发送和接收能力,但在故障条件
下会切换到单线发送器和/或接收器,如果总线故障修 复,将自动复位到差动模式。
1 TJA1054的基本特性
(1)波特率高达125Kb/s。 (2)可连接高达32 个节点。 (3)支持非屏蔽的总线线路。 (4)很低的电磁辐射EME和优良的抗电磁干扰EMI性能。 (5)短路保护、热保护及总线线路在汽车瞬变环境下
can总线收发器原理 -回复

can总线收发器原理-回复CAN总线收发器原理解析CAN总线(Controller Area Network)是一种常用于汽车、工业控制和其他应用领域的串行通信协议。
CAN总线收发器是CAN总线系统中的关键组件,负责实现节点间的数据传输。
本文将深入探讨CAN总线收发器的工作原理,分步介绍其关键概念和功能。
# 第一步:CAN总线概述在深入讨论CAN总线收发器之前,让我们首先了解一下CAN总线的基本概念。
CAN总线是一种多主机、分布式控制系统中的实时通信协议。
它具有高可靠性、抗干扰能力强的特点,因此广泛应用于汽车领域和工业自动化等领域。
# 第二步:CAN总线通信原理CAN总线采用了非常特殊的通信方式,即基于事件驱动的通信。
这种通信方式允许多个节点在同一总线上进行并行通信,而不会发生冲突。
CAN总线使用帧(Frame)的形式传输数据,分为数据帧和远程帧。
这些帧包含了发送节点的标识符、数据和控制信息。
# 第三步:CAN总线收发器的基本功能CAN总线收发器是CAN系统中的关键组成部分,它负责将控制器产生的数字信号转换为总线上的电信号,并将总线上的电信号转换为控制器可以理解的数字信号。
其基本功能包括:1. 信号电平转换CAN总线使用差分信号进行通信,CAN收发器负责将控制器的单端数字信号转换为差分信号,以及将差分信号转换为单端数字信号。
2. 帧的生成和解析CAN总线收发器能够生成符合CAN协议的数据帧,同时能够解析从总线上接收到的数据帧,提取标识符和数据信息。
3. 差分信号驱动CAN总线的抗干扰能力得益于差分信号的使用。
CAN收发器通过差分信号的驱动,有效地抵抗了电磁干扰,确保了数据的可靠传输。
# 第四步:CAN总线收发器的工作流程CAN总线收发器的工作流程可以分为发送和接收两个主要部分。
1. 发送过程- 控制器生成数据帧,并将其传递给CAN收发器。
- CAN收发器将数字信号转换为差分信号。
- 差分信号通过CAN总线传输到其他节点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设计CAN节点时,首先通过互联网等搜 索了解最新款、最适用的CAN控制器。 最好是采用带有丰富I/O功能和CAN控制 器的微控制器(即采用微控制器+CAN控制器 的方式),以减小节点的体积,提高系统的可 靠性。同时还要注意芯片中的处理器内核自己 是否熟悉,开发仿真是否方便等。 在具体介绍总线收发器PCA82C250之前, 首先简要介绍一下CAN总线媒体装置特性 (相关内容可参考:雷霖.《现场总线控制网 络技术》的6.2.7节或陈宪惠.《现场总线技术 及其应用》的7.2.6等文献,自学)
第4章 CAN网络控制器及相关芯片
讨论内容概述: 4.1 CAN总线收发器PCA82C250/82C251 4.2 控制芯片SJA1000
参考文献: 阳宪惠.现场总线技术及其应用. 北京:清华 出版社 史久根等.CAN现场总线系统设计技术. 北京: 国防工业出版社 雷 霖.现场总线控制网络技术. 北京:电子工 业出版社,2004 甘永梅,李庆丰,刘晓娟,等.现场总线技术 及其应用. 北京:机械工业出版社,2004 李正军.现场总线及其应用技术.北京:机械 工业出版社,2006
多个厂家能提供这类芯片,如: Philips的PCA82C250; Bosch的CF151和CDF160; Philips的PCA82C251和TJA1050; TI的SN65HVD2等(在4.1中将介绍Philips 的250/251系列芯片)。
CAN网络控制器具有完成CAN通信协议所 要求的物理层和数据链路层的几乎所有功能。 多个厂家能提供各种类型的CAN网络控制器芯 片。 按功能来分有两类: (1)独立的CAN控制器芯片:如Philips 的SJAl000; (2)集成到微控制器中的控制器芯片:
若所有ECU的晶体管均被关闭,则总线处 于隐性状态。此时总线的平均电压由具有高内 阻的每个ECU电压源产生。 若成对晶体管至少有一个被接通则显性位 被送至总线,它产生流过终端电阻的电流,使 总线的两条线之间产生电压差。 物理媒体附属装置子层的电气规范分别示 于表6-3至表6-7。表中给出的所有数据均与特 定的物理层实现无关。这些表中给出的参数应 被每个ECU的工作温度范围所满足。选择这些 参数可以多达30个ECU连接至总线。
这两款总线收发器器件具有以下特性: ①完全符合ISO11898标准; ②高速率(最高达1Mb/s); ③具有抗汽车环境中的瞬间干扰; ④斜率控制,降低射频干扰(RFl); ⑤差分接收器,抗宽范围的共模干扰,抗 电磁干扰(EMl); ⑥热保护; ⑦总线与电源及地之间的短路保护; ⑧低电流待机模式; ⑨掉电自动关闭输出(未上电的节点对总 线无影响); ⑩可支持多达110个节点相联接。
杜尚峰. CAN总线测控技术及其应用. 北京: 电子工业出版社,2006 王黎明等.CAN现场总线系统的设计与应用. 北京:电子工业出版社,2008 饶运涛等.现场总线CAN原理与应用技术. 北 京: 北京航空航天大学出版社,2007
CAN总线的两层协议固化在它的相关芯片 中,主要是总线控制器和总线收发器。 总线收发器 是一个物理层的 器件,它是CAN 总线控制器和物 理总线之间的接 口,器件可以提 供对总线的差动 发送能力和对 CAN总线的差动 接收能力。
4.1 CAN总线收发器PCA82C250/82C251 ——4.1.3 工作模式 PCA82C250/CRs引脚来选择提供。 1.高速模式 适合执行最大的传输速率和/或最大的总线长 度。常用于普通的工业应用,譬如基于CAN的 DeviceNet。这种模式的总线输出信号用尽可能 快的速度切换,因此一般使用屏蔽的总线电缆以 防止射频干扰问题的出现。 高速模式通过VRs<0.3 Vcc来选择(具体怎么 做?)。
总线上的位电平如下图所示。
CAN技术规范2.0B的物理层包括位编码/ 解码、位定时及同步等内容,但对总线媒体装 置(如驱动器/接收器特性)未作规定,以便在具 体应用中进行优化设计。 ISO11898中,对基于双绞线的CAN总线 媒体装置特性给出了建议如下图所示。
连接于总线的节点 称为电子控制装置 (ECU)。总线每个末端 均接有以RL表示的抑 制反射的终端负载电 阻,而位于ECU内部 的RL应予取消。总线 驱动可采用单线上拉、 单线下拉或双线驱动, 接收采用差分比较器。
8位微控制器+CAN控制器的芯片 ——如Philips的P8XC59X系列芯片; 16位微控制器+CAN控制器的芯片 ——Motorola的68HC912系列; 32位微控制器+CAN控制器的芯片 ——Motorola的MC6837X系列; DSP+CAN控制器的芯片 ——TI的TMS320LF24系列等。 目前还有不少ARM+CAN控制器的芯片及 其他微控制器+CAN控制器的芯片
总线所采用的电缆及终端电阻如表6-8所 示。
总线的拓扑结构见图6-17和表6-9。
4.1 CAN总线收发器PCA82C250/82C251 ——4.1.1 简介 CAN总线收发器PCA82C250/251提供协议 控制器和物理传输线路之间的接口。 可以用高达1Mb/s的速率在两条有差动电 压的总线电缆上传输数据。 由于PCA82C251有更高的击穿电压,因 此可以在电源电压范围内驱动低至45的总线 负载。而且PCA82C251在隐性状态下的拉电流 更小,在掉电情况下的总线输出特性有一定改 善。
CAN能够使用多种物理媒体,如双绞线、 光纤等,最常用的是双绞线。 信号使用差分电压传送,两条信号线被称为 “CAN_H”和“CAN_L”。 总线可具有两种逻辑状态:隐性(逻辑“1”) 或显性(逻辑“0”)。 在隐性状态下,VCAN_H和V CAN_L被固定于平 均电压(2.5V左右),二者之差Vdiff近似为零。 显性状态以大于最小阈值的差分电压表示 (此时电压通常为:CAN_H=3.5V, CAN_L=1.5V )。在显位期间,显性状态改变 隐性状态并发送。
4.1 CAN总线收发器PCA82C250/82C251 ——4.1.2结构和功能
接 C A N 控 制 器
接 C A N 总 线
引脚功能如表 4.2所示。
PCA82C250驱动电路内部具有限流电路, 可防止发送器的输出级对电池电压的正端和负 端短路。 CANH和CANL这两条差分驱动线也能防止 受到在汽车环境下可能发生的电气瞬变现象的 影响。