超声波传感器 arduino
电猫的制作方法

电猫的制作方法介绍电猫是一种使用电子零件制作的小型机器猫玩具,它能够移动、发出声音并且有灵动的表情。
在本文中,我们将介绍制作电猫的详细步骤,以及所需的材料和工具。
所需材料在制作电猫之前,我们需要准备以下材料:•1个Arduino Nano微控制器•2个舵机马达•1个超声波传感器•1个蜂鸣器•1个OLED显示屏•杜邦线若干•1块面包板•1个外壳(可以使用3D打印机打印或者手工制作)制作步骤以下是制作电猫的步骤:1.安装Arduino开发环境首先,从Arduino官网下载并安装Arduino开发环境。
然后,将Arduino Nano与计算机连接。
2.连接舵机马达将两个舵机马达分别连接至面包板上,确保它们的引脚与Arduino Nano的引脚正确连接。
使用杜邦线连接舵机马达和Arduino Nano。
3.连接超声波传感器将超声波传感器连接至面包板上,确保它与Arduino Nano的引脚正确连接。
4.连接蜂鸣器将蜂鸣器连接至面包板上,并与Arduino Nano的引脚正确连接。
5.连接OLED显示屏将OLED显示屏连接至面包板上,并与Arduino Nano的引脚正确连接。
6.编写代码在Arduino开发环境中,编写代码以控制电猫的行为。
代码需要包括对舵机马达、超声波传感器、蜂鸣器和OLED显示屏的控制。
7.上传代码至Arduino Nano将编写好的代码上传至Arduino Nano,确保代码成功加载到微控制器。
8.组装电猫使用外壳和3D打印机或者手工制作,将舵机马达、超声波传感器、蜂鸣器和OLED显示屏安装在外壳上。
9.测试电猫将Arduino Nano与外壳上的电子元件连接,打开电猫的电源,测试它的移动、声音和表情功能。
10.调试和优化如果电猫的功能不正常,可以通过观察和调试代码来解决问题。
优化电猫的代码和行为,使其更加稳定和有趣。
结论通过遵循以上步骤,您可以制作一只自己的电猫。
这个项目将充满乐趣,既可以提升您的电子制作技能,又能够拥有一只有趣的机器猫玩具。
超声波测距设计方案

超声波测距设计方案1. 概述超声波测距是一种利用超声波传感器对目标物体进行距离测量的技术。
它具有非接触、精度高、速度快等优点,广泛应用于工业自动化等领域。
本设计方案旨在实现一个基于Arduino的超声波测距系统,可以测量距离在2cm~400cm之间的目标物体,并将结果显示在液晶屏上,以方便用户观察和使用。
2. 系统组成本系统由硬件和软件两部分组成,硬件系统包括超声波传感器、Arduino主控板、液晶屏、电源等部分;软件系统包括Arduino的程序。
2.1 超声波传感器超声波传感器是本系统中最关键的部分,它通过发射超声波信号并接收回波信号,测量目标物体与传感器的距离。
常用的超声波传感器有HC-SR04、JSN-SR04T等型号,本设计方案使用HC-SR04超声波传感器。
2.2 Arduino主控板Arduino是一种开源的嵌入式系统,具有方便、易用、可扩展等特点,可以实现各种各样的控制任务。
本设计方案使用Arduino UNO主控板,它是一种基于ATmega328P芯片的开发板,具有丰富的接口和较高的性能和稳定性。
2.3 液晶屏液晶屏是显示距离测量结果的部分,本设计方案采用16*2字符型液晶屏,能够显示2行16个字符,显示结果清晰、直观。
2.4 电源本系统采用外接直流电源供电,电压为5V,可以通过USB接口或外部电源插头供电。
3. 系统原理本系统的测距原理基于超声波传感器发射超声波信号并接收回波信号的原理。
当超声波传感器发射超声波信号后,信号会以声速传播在空气中,当遇到目标物体后,部分波信号会被目标物体反射回来,形成回波信号,超声波传感器接收到回波信号后,再通过计算超声波信号的来回时间、声速等参数,便可以计算出目标物体与传感器的距离。
4. 系统设计超声波传感器通过接口连接到Arduino主控板,并需要外接电源,具体接线图如下所示:超声波传感器 VCC -> Arduino 5V液晶屏 RW -> Arduino GND整个系统的软件设计主要包括两部分,一部分是超声波测距的程序,另一部分是液晶屏显示的程序。
基于Arduino的智能停车系统设计与实现

基于Arduino的智能停车系统设计与实现智能停车系统是一种利用现代科技手段,提高停车效率和管理的系统。
基于Arduino的智能停车系统结合了传感技术、通信技术和控制技术,能够实现车辆的自动停放和管理。
本文将介绍基于Arduino的智能停车系统的设计原理、硬件搭建和软件实现过程。
一、设计原理智能停车系统的设计原理是通过传感器检测车辆的到达和离开,然后控制车位的升降或移动,实现车辆的自动停放和取出。
基于Arduino的智能停车系统主要包括以下几个模块:车位检测模块:通过红外传感器或超声波传感器检测车位是否有车辆停放。
车辆检测模块:通过地感线圈或超声波传感器检测车辆的到达和离开。
控制模块:通过电机或舵机控制车位的升降或移动。
显示模块:通过LCD显示屏或LED灯提示用户当前可用车位情况。
二、硬件搭建基于Arduino的智能停车系统的硬件搭建主要包括Arduino主控板、传感器模块、执行器模块和显示模块。
具体搭建步骤如下:连接传感器模块:将红外传感器或超声波传感器连接到Arduino 主控板,用于检测车位和车辆。
连接执行器模块:将电机或舵机连接到Arduino主控板,用于控制车位的升降或移动。
连接显示模块:将LCD显示屏或LED灯连接到Arduino主控板,用于显示当前可用车位情况。
编写程序:使用Arduino IDE编写程序,实现传感器数据采集、控制执行器和显示信息等功能。
三、软件实现基于Arduino的智能停车系统的软件实现主要包括程序设计和算法优化。
具体实现步骤如下:数据采集:编写程序读取传感器数据,判断车位是否有车辆停放以及车辆的到达和离开情况。
控制执行器:根据传感器数据控制执行器,实现车位的升降或移动。
显示信息:根据传感器数据更新LCD显示屏或LED灯,提示用户当前可用车位情况。
算法优化:优化程序算法,提高系统响应速度和准确性,提升用户体验。
四、总结基于Arduino的智能停车系统通过传感技术、通信技术和控制技术的结合,实现了车辆自动停放和管理。
US-100超声波测距模块在Arduino平台上的使用说明
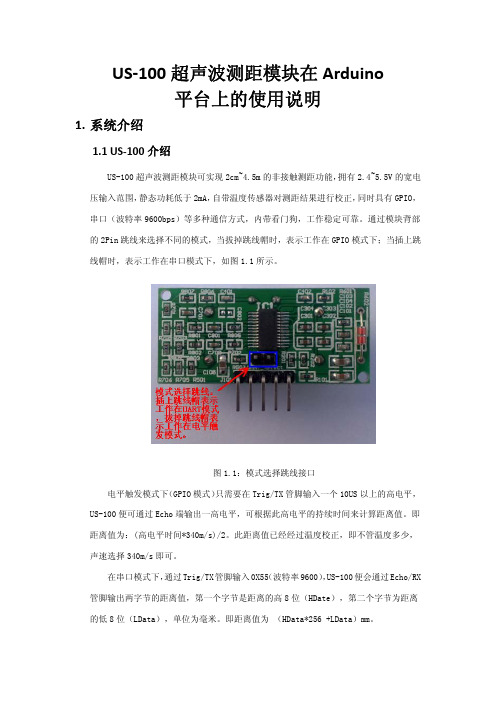
unsigned int TrigPin = 3; //将 Arduino 的 Pin3 连接至 US-100 的 Trig/TX unsigned long Time_Echo_us = 0; unsigned long Len_mm = 0;
void setup() { //Initialize
如果先将 US-100 与 Arduino 连好,再给 Arduino 下载程序,在下载程序时会出错, 因为 US-100 与 Arduino 的通信和 Arduino 下载程序时使用的同一个串口,会相互干扰。
图 3.1:串口模式下 US‐100 与 Arduino 的连接
3.2 串口模式下测距使用例程
}
3.3 串口模式下测温使用例程
int Temperature45 = 0;
void setup() { //将 Arduino 的 RX 与 TX(Digital IO 0 和 1)分别于 US-100 的 Echo/Rx 和 Trig/Tx 相连,确保连接前已经使 US-100 处于串口模式。
Serial.begin(9600); //设置波特率为 9600bps. }
Serial.begin(9600); //测量结果将通过此串口输出至 PC 上的串口监视器 pinMode(EchoPin, INPUT);//设置 EchoPin 为输入模式。 pinMode(TrigPin, OUTPUT); //设置 TrigPin 为输出模式。 }
void loop()
{ //通过 Trig/Pin 发送脉冲,触发 US-100 测距
unsigned int HighLen = 0; unsigned int LowLen = 0; unsigned int Len_mm = 0; void setup() { //将 Arduino 的 RX 与 T(X Digital IO 0 和 1)分别于 US-100 的 Echo/Rx 和 Trig/Tx 相连,确保连接前已经使 US-100 处于串口模式。
基于Arduino的倒车雷达系统设计
基于Arduino的倒车雷达系统设计摘要:本文介绍了一种基于Arduino的倒车雷达系统设计,该系统利用超声波传感器检测车辆周围的障碍物,并通过LCD显示器显示距离信息,以帮助驾驶员进行倒车。
借助Arduino平台,本系统实现了信息处理和控制功能,并通过使用固件代码和电路设计进行了实现。
本文对系统的设计原理、实现步骤和性能评估进行了详细描述,并探讨了未来的研究方向。
关键词:Arduino、倒车雷达、超声波传感器、LCD显示器、电路设计介绍:倒车雷达是车辆周边检测系统的一种,它可以帮助驾驶员在倒车时避免与周围物体发生碰撞。
倒车雷达系统通常由超声波传感器、控制器和显示器等组成。
在本文中,我们使用Arduino平台,设计一种基于超声波传感器检测车辆周围障碍物的倒车雷达系统。
通过这种方式,本系统为车辆驾驶员提供了更加准确和直观的费用信息,提高了驾驶安全性。
材料和方法:本系统的设计包括传感器电路、处理电路和显示电路。
我们使用了HC-SR04超声波传感器,它可以将声波发射到物体并测量回波时间,从而计算出物体与传感器之间的距离。
传感器的引脚连接到Arduino板上的数字引脚。
为了实现距离信息的显示,我们使用了一个16x2 LCD显示器。
Arduino与LCD的连接过程也是通过数字引脚完成的。
结果:我们使用Arduino IDE编译和上传固件代码。
代码实现了声波发送和回波检测功能,以及距离信息的计算和在LCD屏幕上的打印。
在实验过程中,我们放置了几个障碍物,如箱子和球,然后将车辆移动到距它们15厘米左右的地方。
我们发现,当我们启动倒车雷达系统时,LCD显示器显示距离信息,我们可以根据显示器上的信息找到障碍物,避免与它们发生碰撞。
回顾:本文介绍了一种基于Arduino的倒车雷达系统设计,并实现了距离信息的检测和显示功能。
由于Arduino平台的可编程性和易用性,我们可以轻松构建和调试这样的系统。
未来,我们可以拓展系统功能,比如利用蜂鸣器或LED灯来提醒驾驶员,或者通过无线通信将信息发送到智能手机等,以提高系统的实用性和易用性。
arduino超声波 舵机 平衡

arduino超声波舵机平衡Arduino超声波舵机平衡引言:Arduino是一种开源的单片机平台,广泛应用于各种电子项目中。
超声波传感器和舵机作为Arduino常用的模块之一,可以实现许多有趣的功能。
本文将介绍如何利用Arduino、超声波传感器和舵机实现平衡功能。
一、超声波传感器的原理和应用:超声波传感器是一种测量距离的装置,其原理是利用超声波在空气中的传播速度来测量物体与传感器之间的距离。
超声波传感器在许多领域有着广泛的应用,比如智能车、距离测量等。
二、舵机的原理和应用:舵机是一种可以控制角度的电机,其原理是通过控制电机的PWM信号来调整舵机的位置。
舵机在机器人、遥控模型等领域有着重要的应用,可以实现精确的角度控制。
三、平衡功能的设计思路:基于Arduino、超声波传感器和舵机,我们可以设计一个平衡功能。
其主要思路是利用超声波传感器测量到地面距离,然后根据距离的变化来控制舵机的角度,实现平衡功能。
四、系统硬件设计:1. Arduino Uno开发板:作为控制主板,负责接收超声波传感器的信号并控制舵机的角度。
2. 超声波传感器:用于测量地面距离,通常连接到Arduino的数字引脚。
3. 舵机:用于控制平衡,通常连接到Arduino的PWM引脚。
五、系统软件设计:1. 初始化:设置超声波传感器和舵机的引脚。
2. 测量距离:利用超声波传感器测量地面距离,并将结果保存在变量中。
3. 控制舵机:根据测量到的地面距离,通过设定的算法计算出舵机应该调整的角度,并将角度值发送给舵机。
4. 循环运行:不断重复步骤2和步骤3,实现平衡功能。
六、实验结果与分析:经过实际测试,我们成功实现了基于Arduino、超声波传感器和舵机的平衡功能。
当地面距离发生变化时,舵机能够根据算法计算出应调整的角度,并迅速调整到新的平衡位置。
七、结论:本文介绍了如何利用Arduino、超声波传感器和舵机实现平衡功能。
通过测量地面距离和控制舵机的角度,我们成功实现了一个简单的平衡系统。
米思齐教学之Arduino:超声波报警器

04 代码实现
1、通过PWM口D4、D3分别连接超声波模块的发送(trig)和接收 (echo)端口; 2、通过超声波传感器接收距离,主控板判断测出的距离; 3、当距离小于40时,让连接D11口的蜂鸣器出警报,并且距离越短, 警报声频率越高;当距离大于40时,蜂鸣器停止警报。
float item; float checkdistance_4_3() {
蜂鸣器模块,通电之后可以通过震动发出声音,并且可以通
过编程控制,发出不同频率的声音。
蜂鸣器模块针脚介绍:
第一个口为:S信号引脚 第二个口为:电源+ VCC 第三个口为:电源- GND
GND:电线接地端Ground。代表地线或0线。 VCC:电路的供电电压,通常是5V。 S: 输出信号,信号输出情况由主控板控制。
Mixly图形化模块:
tone(11,1000); //从管脚D11,播放声音;频率为1000
Mixly图形化模块:
map(analogRead(A3), 0, 1023, 0, 255);
Mixly图形化模块:
delay(1000); 延时模块:控制执行的时间
03 硬件连接
按照下图所示,连接各个部件
目录
背景介绍 模块介绍 硬件连接 代码实现 实现效果 知识点讲解 可扩展任务 总结与分享
01 背景介绍
关于超声波的小常识:
分类: 我们人类能听到的声音的频率范围为20~20000赫兹; 根据声音的频率可以分为三大类: 次声波:频率小于20Hz 可听声:频率为20~20000Hz之间 超声波:频率大于20000Hz
digitalWrite(4, LOW); delayMicroseconds(2); digitalWrite(4, HIGH); delayMicroseconds(10); digitalWrite(4, LOW); float distance = pulseIn(3, HIGH) / 58.00; delay(10); return distance; } void setup() { item = 0; pinMode(4, OUTPUT); pinMode(5, INPUT); pinMode(11, OUTPUT); }
超声波传感器与单片机连接方法

超声波传感器与单片机连接方法全文共四篇示例,供读者参考第一篇示例:超声波传感器是一种常用的传感器,主要用于测量距离或检测目标物体的存在。
它通过发射超声波脉冲并接收回波来实现测距,具有精度高、响应速度快、适用范围广等优点。
而单片机是一种集成了处理器、存储器和输入输出端口等功能的集成电路,通常用于控制各种电子设备。
在很多项目中,超声波传感器与单片机常常结合在一起使用,以实现一些特定的功能。
如智能避障小车、无人机避障系统、水平测距装置等。
接下来我们将介绍超声波传感器与单片机连接的方法,希望能帮助大家更好地进行相关项目的开发。
一、超声波传感器的工作原理超声波传感器是一种利用超声波进行测距的传感器。
其主要原理就是通过发射超声波脉冲并接收回波来计算目标物体与传感器的距离。
传感器发送一个超声波脉冲,该脉冲会被目标物体反射,然后传感器接收到回波信号,并根据信号的回波时间来计算目标物体与传感器之间的距离。
二、超声波传感器与单片机的连接方法1. 硬件连接超声波传感器与单片机的连接主要是通过传感器的引脚与单片机的引脚进行连接。
一般来说,超声波传感器有四个引脚,分别是VCC、Trig、Echo和GND。
VCC和GND分别连接电源的正负极,Trig和Echo则连接单片机的输入输出引脚。
连接方法如下:- 将传感器的VCC引脚连接到单片机的电源正极(一般是5V);- 将传感器的GND引脚连接到单片机的地线;- 将传感器的Trig引脚连接到单片机的任意一个输出引脚;- 将传感器的Echo引脚连接到单片机的任意一个输入引脚。
2. 软件设置在超声波传感器与单片机连接完成之后,还需要进行一些软件设置,以实现传感器的测距功能。
在单片机程序中,通过设置Trig引脚发送触发信号,然后在Echo引脚接收回波信号,根据回波信号的时间差来计算距离。
下面是一个简单的示例代码,用于连接超声波传感器与Arduino单片机,并实现测距功能:```cpp#define TRIG_PIN 2#define ECHO_PIN 3#define SOUND_SPEED 0.0343void setup() {pinMode(TRIG_PIN, OUTPUT); pinMode(ECHO_PIN, INPUT);Serial.begin(9600);}void loop() {long duration, distance;digitalWrite(TRIG_PIN, LOW); delayMicroseconds(2);digitalWrite(TRIG_PIN, HIGH); delayMicroseconds(10);digitalWrite(TRIG_PIN, LOW);duration = pulseIn(ECHO_PIN, HIGH); distance = duration * SOUND_SPEED / 2;Serial.print("Distance: ");Serial.print(distance);Serial.println(" cm");delay(500);}```以上是一个简单的Arduino代码示例,通过该代码可以实现超声波传感器的测距功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
很多人都知道“蝙蝠与雷达”的故事,说的是科学家研究发现,蝙蝠飞行时利用嘴巴发出超声波,然后用耳朵根据超声波反射回来的时间来判断前方是否有障碍物,以及距离障碍物多远。
于是利用这个原理发明了雷达。
随着科技的发展,超声波传感器已经得到了很广泛的应用。
首先来认识一下超声波传感器的外形,如下图所示:
超声波传感器的引脚有5根,分别是:
1、VCC电源端
2、TRIG控制端
3、ECHO接收端
4、5:GND地线(也即电源的负极)
现在,我们来学习最简单的一种使用方式,“电平触发”。
首先是引脚连接,1脚VCC和arduino板的VCC脚连接,5脚GND也和相应的GND连接,2脚TRIG可以连接到A板的任意一个数字端口,如3号口,
3脚ECHO也一样,如连连至2号口。
这种连接方式的工作原理是:在TRIG端输出一个高电平,维持10us以上,同时传感器在ECHO端会输出一个高电平,一旦传感器接收到反射回来的超声波,ECHO就会跳转为低电平。
于是,可以根据此高电平的维持时间来计算阻碍物的距离。
计算公式是:距离=高电平维持时间x超声波传播速度/2。
有意思的是,在实际编程中,我们并不需要做很多事情,因为ardublock软件提供了一个超声波传感器模块,只要做一简单的设定,标明TRIG和ECHO各接哪个端口,就可以了,模块返回值就直接给出超声波传感器距离阻碍物的距离。
如下图所示程序,我们把测到的值给一个模拟变量t1,然后再增加一个串口输出模块,这个模块的作用是可以给编程软件设计的一个串口监视器发送信息,
从而帮助我们实时观察程序的运行状态。
该串口监视器为arduino软件的TOOLS
菜单下的Serial Monitor选项。
程序下载完成后,超声波传感器就立即工作了,马达检测到距离的阻碍物是213厘米,我把手靠近超声波传感器,马上显示出距离是5、18、20……,到现在为此,我们已经有了不少机器人的器官了,有可以发出信号的LED发光管,有能运动的马达,有检测阻碍物的超声波传感器,机器人的形状是什么样子呢?
朋友,你想好了吗?我们还要给机器人添加什么功能呢?。