基于等效正弦分频过调制策略的感应电机软起动控制系统
基于单片机控制的直流电机PWM调速系统设计
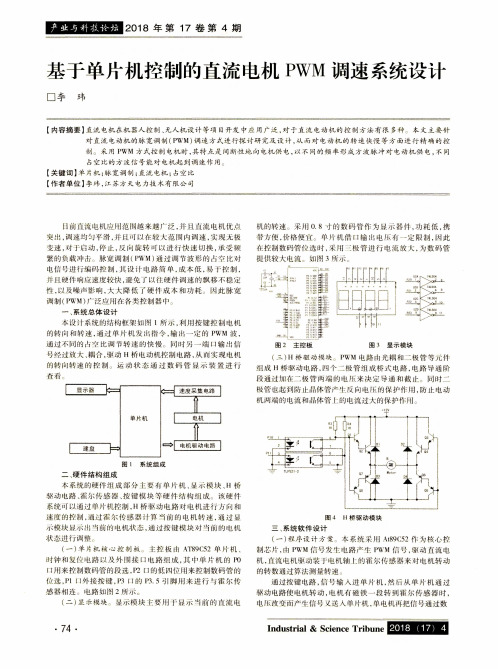
图 4 }1桥 驱 动 模 块
三 、系统 软 件 设 计 (一 )程 序 设 计 方 案 本 系 统 采 用 At89C52作 为 核 心 控 制 芯 片 ,m PWM 倩 号发 ,t三电 路 产 生 PWM 信 号 ,驱 动 直 流 电 fJ【, 流 电 机 驱 动 装 r电 机 轴 上 的 霍 尔 传 感 器 来 埘 电 机 转 动 的 转 数 通 过 算 法 测 戢转 速 通 过 按 键 电路 ,信 输 入 进 单 片 机 ,然 从 单 片 机 通 过 驱 动 电 路 使 电 机 转 动 ,电 机 有 磁 铁 一 段 转 刮 霍 尔 传 感 器 时 , 电 改 变 而 产 生 信 _口 送 人 片 机 , 电 机冉 把 信 通 过 数
201 8 年 第 1 7 卷 第 4 期
基 于单 片机 控制 的直流 电机 PWM调速 系统设计
口 李 玮
【内容摘 要】直流 电机在机 器人控 制 、无人机设计等项 目开发 中应 用广泛 .对于直流 电动 机的控制 方法有很 多种 ..本文主要 针 对 直流 电动 机 的 脉 宽 调 制 (PWM)调 速 方 式进 行 探 讨 研 究 及 设 计 ,从 而 对 电 动 机 的 转 速 快 慢 等 方 面 进 行 精 确 的 控 制 。 采 用 PWM 方 式控 制 电 机 时 ,其 特 点是 间 断性 地 向 t乜机供 电 ,以 不 同 的 频 率 形 成 方 波 脉 冲 对 电 动 机 供 电 ,不 同
1’V
图 1 系 统 组 成
二 、硬 件 结构 组成 水 系统 的 硬 件 组 成 部 分 1三嘤 柯 单 片机 、 求 模 块 、H 侨 驱 动 电 路 、诬 尔 传 感 器 、按 键 卡I!块 等 硬 件 结 构 组 成 恢 6史件 系 统 可以 通 过 片 机 控 制 ,H桥 驱 动 电 路 对 电 机 进 行 厅 向 和 速 度 的 控 制 ,通 过 霍 尔 传 感 计 l、J,前 的 电 机 转 速 ,通 过 撼 ,J=:模块 ,J … 、【, 的 电 机 状 态 ,迎 过 按 键 模 块 对 ,』的 电 f』【 状 态 进 行 捌 (一 )单 片机 核 心 控 制 板 主 控 板 巾 AT89C52 片 机 、 时 钟 和复 化 电路 以 硬 外 围 接 【ll1电 路 组 成 ,其 II1 片 机 的 P0 ¨川 来 控 制 数 码 管 的段 选 ,I)2 f=_1的 低 四 位 州 来 控 制 数 码 管 的 化 选 ,l 1【I外 接 按 键 ,P3 ¨ 的 .5引 脚 用 来 进 行 j霍 尔 传 感 器 十1I连 电 路 如 2所 ,Jj (二 )显 示 模 块 、显爪 f5l块 曼 Jl}j于 示 前 的 流 电
【国家自然科学基金】_电机驱动系统_基金支持热词逐年推荐_【万方软件创新助手】_20140801

科研热词 超声电机 永磁电机 永磁同步电机 矩阵式变换器 矢量控制 直线感应电机 直接驱动 直接转矩控制 环形永磁力矩电机 滑模控制 混合动力汽车 永磁直线同步电机 永磁同步电动机 模糊滑模控制 有限元分析 感应电机 实验 仿真 鲁棒自适应控制 鲁棒控制 驱动系统 驱动保护电路 重复控制 速度跟踪 逆变器 输入功率因数 轴电压 解耦控制 虚拟电压 等效电路 稳定性 神经网络 磁通切换 矩阵变换器 相位角 特定谐波消除脉宽调制 步进电机 模糊控制 模型参考自适应 机器人系统 无速度传感器 无刷直流电机 控制 悬浮力 建模 容错 多目标控制 可编程片上系统 单片机 共模滤波器 伺服电动机 仿真分析
风力发电 频率调节 频率变化 频率俘获 频响函数 预加载 非线性控制 静电悬浮 静电微电机 霍尔电流传感器 霍尔传感器 零航速减摇鳍 零相位误差跟踪控制 零电流开关 零电压开关 陀螺仪 间接位置检测技术 闭环控制 长定子直线感应电动机 锌空电池 锁定放大 重构 速度跟踪 速度测试 逆变器/容错 逆变器 连续被动活动 运动轨迹 运动控制 运动平台 运动学方程 运动学分析 运动姿态控制 过流保护 轻度混合动力 软启动 轮廓误差 转矩 轨迹跟踪 轨迹生成 轨迹检测 轨迹实现 超导转子 超声波电机 超声波电动机 谐波注入 调制技术 误差补偿 误差分析 试验 计算机视觉 解调 观测器 袋鼠跳跃机器人
科研热词 仿真 电动汽车 永磁同步电机 超声电机 驱动系统 滑模控制 永磁环形力矩电机 永磁同步电动机 步进电机 模糊控制 控制 抖振 并联机器人 复合a/c轴 二阶滑模 tms320f2812 鲁棒性 鲁棒l2控制 高压断路器 转动惯量 脉宽调制 联合仿真 精密直线进给系统 直线超声电机 直线电机 直接转矩控制 电机驱动系统 环形永磁力矩电机 混合驱动机构 混合动力 永磁电机 效率优化 控制策略 对称结构 定点控制 多自由度 复合控制 双振子 再生制动 pid控制 dspace can总线 龋齿 高速电主轴 驱动隔离电路 驱动防滑 驱动电路 驱动特性 驱动器 驱动 飞行仿真转台 风能转换系统
基于MATLAB-SIMULINK三相感应电机软启动器的设计与仿真论文
三相异步电动机运转中电源的一相断线,使电动机在严重不对称电压下运行,称为断相运行。断相后其气隙磁场由原来的圆形旋转磁场变为幅值变动的非恒速旋转椭圆形磁场,在噪声很大的车间或井下难以辨别电动机是否正常运转,由于没有足够的重视,常常使电动机烧毁。因此,有必要设置断相保护装置。
由于是交流供电系统,不能通过检测电流是否为零来检测是否断相。对于三相对称电源,相位互差120度,输出定子三相电流之间也存在相位差。所以可以检测是否有两相电流同时为零来检测是否断相。
7.2仿真结果16
7.3结果分析20
八、结语20
九、参考文献22
一、项目背景
感应电动机以其结构简单、运行可靠、维护方便、效率较高、价格低廉等优势得以在工业生产中广泛应用。但是感应电动机的启动性能较差,启动瞬时电流冲击很大,可高达额定电流的10倍以上,且启动冲击转矩也很大,加速了电机的老化及机械损坏,对电机本身及其拖动设备的使用寿命有很严重的影响。同时也会对电网造成冲击,使供电电网产生较大的波动,从而影响同一电网中其他设备的正常工作。除此之外,如果发生缺相或欠压,则极易造成电动机烧毁。
图4-3同步信号提取电路
4.3、电流采样电路的设计
由于主要采用限流与斜坡升压软启动相结合的控制方案,软启动器工作时的主要任务是控制主回路的电流,因此要对电路进行监控控制。电路中须有电流检测电路实现电流反馈控制。这部分电路主要由电流传感器电路、绝对值电路、电压比较电路组成。
4.3.1电流传感器电路
输入主电路
电机启动的主电路采用有三组反并联晶闸管构成的三相交—交变频电路,采用同步电压检测环节来检测相电压的过零点,检测结果作用于单片机,以实现对加在感应电机上的电压进行控制。利用电流反馈检测环节,将启动电流反馈给单片机,单片机通过一定的算法改变输出电压的数字量,从而改变作用于驱动电路的模拟信号电压值,达到改变晶闸管触发角,实现调节作用于电机定子的电压,当反馈电流大于电流限定值时,触发角维持原值,不再改变直至电流减小到限定值后,继续升压直至全压。
基于DSP的直流电机控制系统设计本科毕业论文

基于D S P的直流电机控制系统设计摘要:直流电机由于励磁磁场和电枢磁场完全解耦,可以独立控制,因此具备良好的调速性能,出力大、调速范围宽和易于控制,广泛应用于电力拖动系统中;而随着对电机控制要求的不断提高,普通的单片机越来越不能满足对电机控制的要求,DSP技术的发展正好为先进控制理论以及复杂控制算法的实现提供了有力的支持;本设计采用美国TI公司专门为电机数字化控制设计的16位定点DSP 控制器TMS320LF2407作为微控制器;该芯片集DSP信号高速处理能力及适用于电机控制优化的外围电路于一体,可以为高性能传动控制技术提供可靠高效的信号处理与控制硬件;电机的控制系统是由检测装置、主控制器、功率驱动器以及上位机组成,其中DSP控制器是电机控制系统的关键部分,负责对电机的反馈信号进行处理并输出控制信号来控制电机的转动;关键词:直流电机; DSP; PID控制器; PWMThe Design of DC Motor Control System Based on DSP Abstract:The DC motor armature magnetic field and the excitation completely decoupled, it can be independently controlled, so it has a good speed performance, contribute to a large power, widely speed range, and easy to control, so it is widely used in electric drive systems. With the motor control required for continuous improvement, common single MCU can't meet requirements of the motor control well, DSP technology just for the advanced control theory and complex control algorithm implementation provides a strong support.This design uses the American TI company specially for motor control design of digital 16 fixed-point DSP controller TMS320LF2407 as the controller. The chip set DSP signal the high processing capacity and used in motor control optimization the periphery of the circuit in a body, high performance driving control technology to provide reliable and efficient signal processing and control hardware. Motor control system is composed of detection devices, the main controller, power driver and PC componen ts, whichDSP controller is a key part of the motor control system , responsible for the motor feedback signal processing and output control sig n al to control the rotation of the motor.Keywords:DC motor, DSP, PID controller, PWM目录第1章绪论课题概述课题研究的背景电气传动是以电动机的转矩和转速为控制对象,按生产机械工艺要求进行电动机转速控制的自动化系统;根据电动机的不同,工程上通常把电气传动分为直流电气传动和交流电气传动两大类;纵观电气传动的发展过程,交流与直流两大电气传动并存于各个时期的各大工业领域内,虽然它们所处的地位和作用不同,但它们始终随着工业技术而发展的;特别是随着电力电子技术和微电子学的发展,在相互竞争中完善着自身,发生着变更;由于直流电机具有良好的线性调速特性,简单的控制性能,因此在工业场合应用广泛;近代,随着生产技术的发展,对电气传动在起制动、正反转以及调速能力、静态特性和动态响应方面都提出了更高的要求,所以计算机控制电力拖动控制系统已成为计算机应用的一个重要内容;直流调速系统在工农业生产中有着更为广泛的应用;随着计算机技术和电力电子技术的飞速发展,两者的有机结合使电力拖动控制技术产生了新的变化;电力电子技术、计算机技术和直流拖动技术的组合是技术领域的交叉,具有广泛的应用前景;有不少的研究者己经在用DSP作为控制器进行研究;直流调速控制系统的控制方法经历了机械式的、双机组式的、分立元件电路式的、集成电路式的、单片机式的发展过程;随着数字信号处理器DSP的出现,给直流调速控制提供了新的手段和方法;将计算机技术的最新发展成果运用在直流调速系统中,在经典控制的基础之上探讨一种新的控制方法,为计算机技术在电力拖动控制系统中的应用做些研究性的工作;用计算机技术实现直流调速控制系统,计算机的选型很多;经过选择,选取DSP芯片作为控制器;直流调速系统的内容十分丰富,有开环控制系统,有闭环控制系统;有单闭环控制系统,有双闭环控制系统和多闭环控制系统;有可逆调速系统,有不可逆调速系统等9;开展本课题研究的控制对象是闭环直流调速系统;研究的目的是利用计算机硬件和软件发展的最新成果,对控制系统升级进行研究;研究工作是在对控制对象全面回顾总结的基础上,重点对控制部分展开研究,它包括对实现控制所需要的硬件和软件环境的探讨,控制策略和控制算法的探讨等内容;目前,对于控制对象的研究和讨论很多,有比较成熟的理论,但实现控制的方法和手段随着技术的发展,特别是计算机技术的发展,不断地进行技术升级;这个过程经历了从分立元件控制,集成电路控制和单片计算机控制等过程;每一次的技术升级都是控制系统的性能有较大地提高和改进;随着新的控制芯片的出现,给技术升级提供了新的可能;电机控制是DSP应用的主要领域,随着社会的发展以及对电机控制要求的日益提高,DSP将在电机控制领域中发挥越来越重要的作用;课题研究的目的及意义长期以来,直流电机一直占据着速度控制和位置控制的统治地位;由于它具有良好的线性调速特性,简单的控制性能,高质高效的平滑运转的特性,尽管近年来不断受到其它电动机的挑战,但到目前为止,就其性能来说仍无其它电动机可比;在控制系统的构成上,本课题对硬件电路进行了设计,而这个硬件系统具有一定的通用性,也即可以将它作为一个硬件平台,在其它过程控制中应用;另外,由DSP的特点量身订做,可以在其它的控制系统中根据不同的要求进行外围电路的设计,进而来构成硬件系统,这样既便于设计思想的物化,又使得设计系统更加紧凑,不浪费资源;本直流电机控制系统采用经典的数字增量式PID控制算法,在本文中对数字增量式PID控制的理论、设计和实现进行了较为详细的论述; 课题研究的现状近些年来,随着现代电力电子技术、控制技术和计算机技术的发展,电机的应用技术也得到了进一步的发展,新产品、新技术层出不穷;除了人们己经熟悉的普通电机外,许多不同用途的特种电机也不断问世,如广泛应用于办公设备的无刷直流电机和高精度的步进电机、用于照相机的超声波电机、用于心脏血液循环系统的微型电机等等;另一方面,由于应用了电力电子技术,电机的控制技术变得更加灵活,效率也更高,如变频器控制的异步电机及伺服系统即是典型的例子1;在实际中,电机应用已由过去简单的起停控制、提供动力为目的应用,上升到对其速度、位置、转矩等进行精确的控制,使被驱动的机械运动符合预想的要求;例如在工业自动化、办公室自动化和家庭住宅自动化方面使用大量的电机,几乎都采用功率器件进行控制,将预定的控制方案、规划指令转变成期望的机械运动;这种新型控制技术己经不是传统的“电机控制”或“电气传动”而是“运动控制”;运动控制使被控机械实现精确的位置控制、速度控制、加速度控制、转矩或力的控制,以及这些被控机械量的综合控制;因此现代电机控制技术离不开功率器件和电机控制器的发展5;电机的控制器经历了从模拟控制器到数字控制器的发展;由于模拟器件的一些参数受外界因素影响较大,并且它的精度也差;所有这些都使得模拟控制器的可重复性比较差,控制效果不理想,因此调速电机的控制器逐渐朝数字化方向发展;数字控制器与模拟控制器相比较,具有可靠性高、参数调整方便、更改控制策略灵活、控制精度高、对环境因素不敏感等优点;随着现有的工业电气传动、自动控制和家电领域对电机控制产品需求的增加用户也不断提高对电机控制技术的要求5;总是希望能在驱动系统中集成更多的功能,达到更高的性能;许多设备试图使用8位或是准16位的微处理器实现电机的闭环控制,然而它们的内部体系结构和计算功能都阻碍了这一要求的实现;例如,在很多领域如工业、家电和汽车,用户希望使用效率高且去掉霍尔效应传感器的电机;这种电机的控制可以通过使用先进的电机控制理论、采用高效的控制算法来实现;但是这可能超出上述微处理器的计算能力;使用高性能的数字信号处理器DSP来解决电机控制器不断增加的计算量和速度需求是目前较为普遍的做法;将一系列外围设备如模数转换器A/D、脉宽调制发生器PWM和数字信号处理器DSP集成在一起,就获得一个既功能强大又非常经济的电机控制专用的DSP芯片;近年来,各种集成化的一单片DSP的性能得到很大的改善,软件和开发工具越来越多,越来越好,价格却大幅度降低;低端产品的价格已接近单片机的价格水平,但却比单片机具有更高的性能价格比;越来越多的单片机用户开始选用DSP器件来提高产品性能,DSP器件取代高档单片机的时机己成熟13;首先,与单片机相比,DSP器件具有较高的集成度;DSP具有更快的CPU,更大容量的存储器,内置有波特率发生器和FIFO缓冲器,提供高速、同步串口和标准异步串口;有的片内集成了A/D和采样/保持电路,可提供PWM输出;更为不同的是,DSP器件为精简指令器件,大多数指令都能在一个周期内完成,并且通过并行处理技术,使一个指令周期内可完成多条指令;同时DSP采用改进的哈佛结构,具有独立的程序和数据空间,允许同时存取程序和数据;又配有内置高速硬件乘法器、多级流水线,使DSP 器件具有高速的数据计算能力;而单片机为复杂指令系统计算机CISC,多数指令要2-3个指令周期来完成;单片机采用冯.诺依曼结构,程序和数据在同一空间存取,同一时刻只能单独访问指令和数据、ALU只能做加法,乘法需要由软件来实现,因此占用较多的指令周期,也就是说速度比较慢;所以,结构上的差异使DSP器件比准16位单片机单指令执行时间快8-10倍,完成一次乘法运算快16-30倍;DSP器件还提供了高度专业化的指令集,提供了FFT快速傅立叶变换和滤波器的运算;此外,DSP器件提供了JTAG Joint Test Action Group接口,具有更先进的开发手段,批量生产测试更方便;其次,基于DSP芯片制造的电机控制器可以降低对传感器等外围器件的要求;通过复杂的算法达到同样的控制性能,降低成本,可靠性高,有利于专利技术的保密;现在各大DSP生产厂家都推出自己的内嵌式DSP电机控制专用集成电路;如占DSP市场份额45%的美国德州仪器公司,凭借自己的实力,推出了电机控制器专用DSP--TMS320C24x;新的TMS320C24x DSP采用TI公司TMS320C2xLP16位定点DSP核,并集成了一个电机事件管理器,后者的特点是可以最佳方式实现对电机的控制;该器件利用TI的可重用DSP核心技术,显示出TI的特殊能力一通过在单一芯片上集成一个DSP和混合信号外设件,制造出面向各种应用的DSP方案;TMS320C24x作为第一个数字电机控制器的专用DSP系列,可支持用于电机控制的指令产生、控制算法处理、数据交流和系统监控等功能;集成的DSP核、最佳化电机控制器事件管理器和单片式A/D设计等诸多功能块加在一起,就可以提供一个单芯片式数字电机控制方案;系列中的TMS320LF2407包括一个30MIPSDSP核、两个事件管理器、32位的中央算术逻辑单元、多达16通道的IO位A/D转换器、64K的I/0空间和一个32K字的闪速存储器,它利用TMS320的定点DSP软件开发工具和JTAG仿真支持,可使电机控制领域的研发人员方便地调试控制器和脱机使用;第三,DSP运算速度快,控制策略中可以使用先进的实时算法,如自适应控制、卡尔曼滤波、状态预估等,大大提高控制系统的品质;而且DSP 控制软件可用C语言或汇编语言编写或者二者嵌套使用;因此采用DSP 芯片制造的电机控制器便于用户的调试和应用;最后,在越来越多的场合,如电动汽车、纺织行业、水泵变频调速系统等,他们往往是规模比较大,时序、组合逻辑都很复杂的情况,这时如果同时运用DSP芯片和一些其它的可编程逻辑器件可以大大减小系统的体积、提高系统运算能力,实现复杂的实时控制;课题研究的内容本文主要研究基于DSP的直流电机控制系统,通过控制算法和调速方法的分析,利用电机调速、DSP芯片控制、上位机通信、按键模块等的基本原理及相关知识,实现对电机的速度控制;整个系统的基本思想就是利用DSP内部资源产生可控制的脉冲控制整流电压,改变串入主回路中的直流电动机的电磁转矩,实现电动机的转速调节;研究内容包括如下:1电机控制系统功能实现的分析;2控制算法与调速方法的分析与设计;3电机驱动、电源模块、按键模块、测速、显示模块的硬件设计与实现;4系统主程序、按键扫描、控制算法、测速、电机速度控制等程序的分析、设计与实现;5电机控制系统整机测试与实现;第2章系统总体设计系统的组成由图2-1可知,该设计包含DSP控制单元、功率驱动单元、检测单元、显示单元、通信单元五个部分;DSP控制单元:对来自上位机的给定信号和来自传感器的反馈信号按一定的算法进行处理,输出相应的PWM波,经过光电隔离部分,送给功率驱动单元;功率驱动单元:对来自DSP控制器的PWM信号进行功率放大后送给直流电动机的电枢两端,驱动电机与负载;速度检测单元:采集电机的速度信息,并送给主控制器;显示单元:将采集到的电机转速信息予以显示;通信单元:负责主控制器与上位机及外设的信息交换;图2-1 系统总体框图2. 2 DSP芯片选择直流电机的调速控制系统一般采用电机专用微处理器,其种类主要包括复杂指令集CISC处理器如工NTEL196MX系列单片微控制器,精简指令集RISC如日立公司SH704x系列单片微控制器,哈佛结构DSP处理器如TI公司T145320F24X系列DSP;一般用于直流电机控制的徽处理器性能要满足以下几个方面:1指令执行速度;2片上程序存储器、数据存储器的容量及程序存储器的类型;3乘除法、积和运算和坐标变换、向量计算等控制计算功能;4中断功能和中断通道的数目;5用于PWM生成硬件单元和可实现的调制范围以及死区调节单元;6用于输入模拟信号的A/D转换器;7价格及开发环境;DSP一般采用哈佛或者改进的哈佛结构,程序空间和数据空间分离,程序的数据总线和地址总线分离,数据的数据总线和地址总线分离;这种结构允许同时访问程序指令和数据,在同一机器周期里完成读和写,并行支持在单机器时钟内同时执行算术、逻辑和位处理操作,极大地提高了执行速度,并且电机控制专用DSP具备丰富的设备和接口资源;TI公司的TMS320系列DSP芯片是目前最有影响、最为成功的数字信号处理器,其产品销量一直处于国际领先地位,是公认的世界DSP霸主;本论文选择了TI公司的TMS320LF2407DSP作为直流电机控制系统的微处理器;TMS320LF2407 DSP 控制器介绍TMS320LF2407 DSP是专为数字电机控制和其它控制系统而设计的;是当前集成度最高、性能最强的运动控制芯片;不但有高性能的C2XX CPU 内核,配置有高速数字信号处理的结构,且有控制电机的外设;它将数字信号处理的高速运算功能,与面向电机的强大控制功能结合在一起,成为传统的多微处理器单元和多片系统的理想替代品12;TMS320LF2407的片内外设模块包括:事件管理模块EV、数字输入/输出模块I/O、模数转换模块ADC、串行外设模块SPI、串行通信模块SCI、局域网控制器模块CAN;1事件管理器EVA和EVBTMS320LF2407提供两个事件管理器EVA和EVB模块,每个模块包含两个通用GP定时器、3个全比较/PWM单元、3个捕获单元和一个正交编码脉冲电路;事件管理器位用户提供了众多的功能和特点,在运动控制和电机控制中特别有用;通用定时器:LF2407共有4个通用定时器,每个定时器包括:一个16位的定时器增/减计数的计数器TxCNT;一个16位的定时器比较寄存器TxCMPR;一个16位的定时器周期寄存器TxPR;一个16位的定时器控制寄存器TxCON;可选择的内部或外部输入时钟;各个GP定时器之间可以彼此独立工作或相互同步工作;与其有关的比较寄存器可用作比较功能或PWM波形发生;每个GP定时器的内部或外部的输入时钟都可进行可编程的预定标,它还向事件管理器的子模块提供时毕;每个通用定时器有4种可选择的操作模式:停止/保持模式、连续增计数模式、定向增/减计数模式、逢续增/减计数模式;当计数器值和比较寄存器值相等时,比较匹配发生,从而在定时器的PWM输出引脚TxPWM/TxCMP上产生CMP/PWM 脉冲,可设置控制寄存器GPTCON中的相应位,选择下溢、比较匹配或周期匹配时自动启动片内A/D转换器;比较单元:LF2407有6个比较单元,每个EV模块有3个;每个比较单元又有两个相关的PWM输出,比较单元的时基由通用定时器1 EVA模块和通用定时器3 EVB模块提供;每个比较单元和通用定时器1或通用定时器3,死区单元及输出逻辑可在两个特定的器件引脚上产生一对具有可编程死区以及输出极性可控的PWM输出;在每个EV模块中有6个这种与比较单元相关的PWM输出引脚,这6个特定的PWM输出引脚可用于控制三相交流感应电机和直流无刷电机;由比较方式控制寄存器所控制的多种输出方式能轻易地控制应用广泛的开关磁阻电机和同步磁阻电机;捕获单元:捕获单元被用于高速I/O的自动管理器,它监视输入引脚上信号的变化,记录输入事件发生时的计数器值,即记录下所发生事件的时刻;该部件的工作由内部定时器同步,不用CPU干预;LF2407共有6个捕获单元,CAP1,CAP2,CAP3可选择通用定时器1或2作为它们的时基,但CAP1和CAP2一定要选择相同的定时器作为它们的时基;CAP4,CAP5,CAP6可选择通用定时器3或4作为它们的时基,同样CAP4和CAP5也一定要选择相同的定时器作为它们的时基;每个单元各有一个两级的FIFO缓冲堆栈;当捕获发生时,相应的中断标志被置位,并向CPU发中断请求;若中断标志己被置位,捕获单元还将启动片内A/D转换器;正交编码脉冲QEP单元:常用的位置反馈检测元件为光电编码器或光栅尺,它直接将电机角度和位移的模拟信号转换为数字信号,其输出一般有相位差为90°的A、B两路信号和同步脉冲信号C;A、B两路脉冲可直接作为LF2407的CAP1/QEP1和CAP2/QEP2引脚的输入;正交编码脉冲电路的时基由通用定时器2或通用定时器4提供,但通用定时器必须设置成定向增/减计数模式,并以正交编码脉冲电路作为时钟源;2数字输入/输出模块I/ODSP器件的数子输入/输出引脚均为功能复用引脚;即这些引脚既可作为通用I/O功能双向数据输入/输出引脚,也可作特殊功能PWM输出、捕获输入、串行输入输出等引脚;数子I/O模块负责对这些引脚进行控制和设置;两种功能的选择由I/O复用控制寄存器MCRx,x=A,B,C来控制;当引脚作为通用I/O时,由数据和方向控制寄存器PxDATDIR,x=A,B,C,D,E,F指出各I/O引脚的数据方向输入还是输出和当前引脚对应的电平高或低;读通用I/O引脚的电平或向引脚输出电平,实际上是对相应的寄存器PxDATDIR进行读写操作;3模数转换器ADC模块在自动控制系统中,被控制或被检测的对象,如温度、压力、流量、速度等都是连续变化的物理量,通过适当的传感器如温度传感器、压力传感器、光电传感器等将他们转换为连续变化的电压或电流即模拟量;模数转换器ADC就是用来讲这些模拟电压或电流转换成计算机能够识别的数字量的模块;TMS320LF2407期间内部有一个10为的模数转换器ADC;该模块能够对16个模拟输入信号进行采样/保持和A/D转换,通道的转换顺序可以编程选择;4串行通信接口SCI模块2407器件的串行通信接口SCI模块是一个标准的通信异步接收/发送UART可编程串行通信接口;SCI支持CPU与其他异步串口采用标准不返回零NRZ模块进行异步串行数字通信;SCI有空闲线和地址位两种多处理器通信方式;两个输入/输出引脚:SCIRXDSCI接收数据引脚和SCITXDSCI发送数据引脚;SCI通过一个16位的波特率选择寄存器,可编程选择64K种不同速率的波特率;SCI支持半双工和全双工操作,发送器和接收器的操作可以通过中断或转换状态标志来完成;5串行外设接口SPI模块串行外设接口SPI模块是一个高速同步串行输入/输出I/O口,它能使可编程长度1—16位的串行位流以可编程的位传输速率输入或输出器件;SPI可作为一种串行总线标准,以同步方式实现两个设备之间的信息交换,即两个设备在同一时钟下工作;SPI通常用于DSP控制器与外部设备或其他控制器之间的通信,用SPI可以构成多机通信系统,SPI还可以作为移位寄存器、显示驱动器和模数转换器ADC等器件的外设扩展口;6CAN控制器模块LF24xx系列DSP控制器作为第一个具有片上CAN控制模块的DSP芯片,给用户提供一个设计分布式或网络化运动控制系统的无限可能;CAN总线是一种多主总线,通信介质可以是绞线、同轴电缆或光导纤维,通信速率可达1 Mbps,通信距离可达10km;CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码,使网络内的节点个数在理论上不受限制;由于CAN 总线具有较强的纠错能力,支持差分收发,因而适合高干扰环境,并具有较远的传输距离;2407的CAN控制器模块是一个16位的外设模块,支持CAN2. 0B协议;CAN模块有6个邮箱MBOX0—MBOX5;有用于0,1,2和3号的邮箱的本地屏蔽寄存器和15个控制/状态寄存器;CAN模块既有可编程的位速率、中断方式和CAN总线唤醒功能;自动回复远程请求;自动再发送功能在发送时出错或仲裁是丢失数据的情况下;总线出错诊断和自测模式; 硬件方案论证测速传感器的选择方案一:使用测速发电机,输出电动势E和转速n成线性关系,即E=kn,其中k是常数;改变旋转方向时,输出电动势的极性即相应改变;方案二:采用霍尔传感器,霍尔元件是磁敏元件,在被测的旋转体上装一磁体,旋转时,每当磁体经过霍尔元件,霍尔元件就发出一个信号,经放大整形得到脉冲信号,送运算;方案三:在电机的转轴上套一码盘,利用光电对管测脉冲,每转一圈OUT端输出若干个脉冲;本设计中码盘每转一圈,输出4个脉冲经比较,方案一中的测速放电机安装不如方案二中霍尔元件安装方便,并且准确率也没方案二的高,并且方案二不需A/D转换,直接可以被DSP接收;但方案二的霍尔传感器的采购不是很方便,故采用方案三,它具有方案二的几乎所有的优点;方案三中可以采用定时的方法:是通过定时器记录脉冲的周期T,这样每分钟的转速:M=60/4T=15/T;0也可以采用。
伺服电机毕业设计论文
南京工程学院自动化学院本科毕业设计(论文)题目:SVPWM 在BLDC电机中的应用Graduation Design (Thesis) SVPWM in The Application of BLDC MotorByZHU XiangSupervised byTENG Fu LinSchool of AutomationNanjing Institute of TechnologyJune, 2012毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
基于TMS32OLF2407芯片的SVPWM变频调速系统
本实验I M选 玎三菱 公司 ̄ P 0 J 6) P 】 * M2 CS0 I , J .实验 电机 的参数为 : 功 率2 ( ,额 定 线 电 ̄ 3 0 5J w , 8 V.频率 I .额 定电流0 8 A,功 率 Hz .3 因数0 6 . 8.Y型 接 法 S WM波 的 载 波 频 率 为 5 Hz 实 验 波 形 可 VP k
断t T是否成 立 ,如不 成立 , t 保持 不变 ;如成立 ,则按照式 ,>' + . 、 ( 进 行饱和 计算 ,求出t 、t 、‘ ,把 电压 矢量的端 点轨迹拉 n) , 2 . 回六边 形内切 圆内。
’
, : f , , ‘ ‘t + t l 2
土
技 术 创 新
。
缸 科 技 2 1年第1 0 00 期
斗= =
,
基 于T 2 F 4 7 片 的S W 频 调 速 系统 S3 L 2 O 芯 M O VP M变
O :
0
.
一
一 2
陈 利 群 李 春 茂
( 南 交通大学 电气工程学 院 ) 西
f1 l I
、
t =0 0
3 系 统 的硬 件 和 软 件
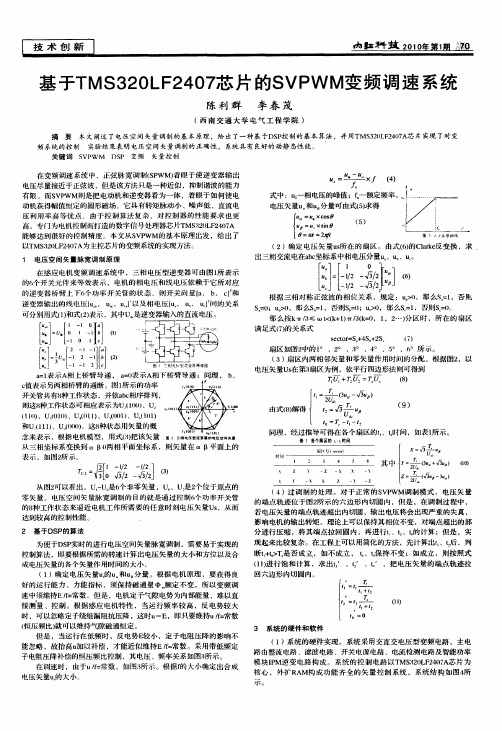
( ) 1 系统的硬件 实现 。系统 采用交直交 电压型变频 电路 ,主 电
路由整流 电路 、滤波 电路 、开关 电源电路 、电流检 测电路及智能功率 模块 IM逆变 电路 构成 。系统 的控制 电路 以T 3 0 F 4 7 芯片 为 P MS 2 L 2 0 A 核心 ,外 扩RA M构 成功能 齐 全的矢 量控 制 系统 。系统结 构如图 4 所
示。
黔 南 缸 科 技 2 1年第1 00 期
技 术 创 新
一种基于模糊自适应PID的电动执行器智能控制方法
1引言近年来电动执行器系统的控制策略得到了越来越多的研究,对系统的稳定运行发挥着关键作用。
电动执行器系统的控制方案主要包括驱动电机以及系统主要单元的控制策略。
系统需要提供相当多的转矩和转速,以控制阀门开度。
对于系统的动态调节,其响应速度应该相对够快,以达到系统控制精度要求。
传统阀门位置控制常采用PID 方法,该方案是基于比例、积分、微分输出控制量,来实现对系统的准确控制,具有相对简单、容易实现等特点。
然而,当被控对象的环境经常变化,即需频繁调整控制参数,对该方法的实际应用提出了限制。
因此,需要对以往的PID 策略进行改进,一种方案是改进传统控制结构,另一种则是采用智能控制方法[1]。
文献[2]研究了PID 控制方案,针对电子液压制动系统下电动执行器调节阀的控制,电动执行器流量调节阀采用传统的控制方法即可实现输出流量精确、快速的跟踪,然而系统具有较差的鲁棒性。
文献[3]采用校正控制,进一步减小了系统超调及稳态误差,大大提升了执行器系统的响应速度和抗扰动能力,并且明显改善了回差。
文献[4]研究了基于增量一种基于模糊自适应PID 的电动执行器智能控制方法李伟华(苏州博睿测控设备有限公司,苏州215143)摘要:电动执行器的系统控制方案研究在近年有较大进展。
传统控制方案基于PID 的控制策略易于在通常的实际控制系统中实现,但对于控制系统复杂程度较高的场合,传统控制方法已不能适应系统鲁棒性和实时性的要求。
为解决此问题,提出基于模糊自适应PID 的执行器系统智能控制方案。
实验结果表明,新方案有较好的动态表现以及较快的响应,并且具有较高的调节准确度,能够实现PID 参数的在线自调整,实时性更好,控制精度和鲁棒性更高,参数计算负荷小,设计方法易于实现。
关键词:模糊控制;自适应;PID 控制;智能控制DOI :10.3969/j.issn.1002-2279.2021.02.015中图分类号:TP273+.4文献标识码:A 文章编号:1002-2279(2021)02-0058-04An Intelligent Control Method of Electric Actuator Based onFuzzy Adaptive PIDLI Weihua(Suzhou Bonray Measurement&Control Equipment Co.,Ltd,Suzhou 215143,China )Abstract:Recently,great progress has been made in the research of system control scheme of electric actuator.The PID-based control strategy of the traditional control scheme is easy to be realized in the common practical control system,but the traditional method can no longer meet the requirements of system robustness and real-time when the control system is complex.To solve the problem,an intelligent control scheme of actuator system based on fuzzy adaptive PID is proposed.Experimental results show that the new scheme has better dynamic performance and faster response,as well as higher adjustment accuracy,which can realize on -line self -adjustment of PID parameters,with better real -time,higher control accuracy and robustness and less parameter calculation load,and the design method is easy to realize.Key words:Electric actuator;Fuzzy control;Self-adaptation;PID control;Intelligent control作者简介:李伟华(1978—),男,陕西省西安市人,助理工程师,主研方向:测控技术及仪器。
一种快速SVPWM算法及其过调制策略研究
一种快速SVPWM算法及其过调制策略研究王光;王旭东;马骏杰;白亚丽【摘要】针对传统 SVPWM 算法结构复杂、运算量大等问题,提出一种基于三扇区矢量空间的快速 SVPWM 算法.该算法无需进行坐标变换,有效避免了传统算法中多次三角运算和开方运算,减少了逻辑判断次数.通过简单四则运算便能快速实现精准调制,从而极大地简化了 SVPWM 的算法结构,减少了算法的执行时间.此外,分析并提出基于分段非线性拟合的 SVPWM 算法过调制策略.该策略避免了传统算法过调制策略中复杂的保持角和控制角的计算,并减少了查表法带来的内存消耗和调制误差,进一步提升了直流母线电压利用率.仿真和实验验证了该 SVPWM 算法及其过调制策略的有效性和优越性.%To solve the problems of complex structure and large computation of the traditional algorithm, a fast SVPWM algorithm based on three-section vector space is put forward. Without coordinate transformation, it uses the arithmetic in stead of complicated trigonometric operation, so it can reduce the number of logic judgment and get more accurate modulation. As a result, the algorithm structure of SVPWM is greatly simplified and the operation time is reduced. Besides, to improve the utilization ratio of DC bus voltage further, an over-modulation method based on piecewise nonlinear fitting is analyzed and raised, which can avoid the complex calculation of the holding angle and the control angle as well as the error of the modulation caused by look-up table method is also reduced. The results of simulation and experiment indicate that the fast SVPWM algorithm and its over-modulation method are effective and superior.【期刊名称】《电力系统保护与控制》【年(卷),期】2019(047)003【总页数】10页(P136-145)【关键词】SVPWM;快速算法;三扇区矢量空间;过调制【作者】王光;王旭东;马骏杰;白亚丽【作者单位】哈尔滨理工大学汽车电子驱动控制与系统集成教育部工程研究中心,黑龙江哈尔滨 150080;哈尔滨理工大学汽车电子驱动控制与系统集成教育部工程研究中心,黑龙江哈尔滨 150080;哈尔滨理工大学汽车电子驱动控制与系统集成教育部工程研究中心,黑龙江哈尔滨 150080;哈尔滨理工大学汽车电子驱动控制与系统集成教育部工程研究中心,黑龙江哈尔滨 150080【正文语种】中文近年来,空间矢量PWM(SVPWM)控制技术由于其相比于正弦波脉宽调制(SPWM)技术具有直流母线电压利用率高,电压谐波含量低,且更易于数字化实现等优点,逐渐被广泛运用于交流电机控制、新能源发电、不间断电源等三相逆变场合[1-5]。
无电解电容变频器的母线电压振荡抑制研究
电气传动2023年第53卷第12期ELECTRIC DRIVE 2023Vol.53No.12摘要:针对传统电解电容变频器体积大、使用寿命短的问题,采用薄膜电容代替电解电容构成无电解电容交-直-交结构的变频器。
针对无电解电容变频器V/F 运行在低频过程中母线电压振荡的问题,首先根据感应电机的等效电路模型分析不同工作模式下的母线电压纹波和谐振特性,采用劳斯稳定判据分析无电解电容驱动系统的稳定条件;其次根据无电解电容驱动系统的数学模型,分析振荡过程中母线电压和定子无功电流的关系;最后提出基于定子电压定向的无功电流反馈控制策略抑制母线电压振荡,提高系统稳定性。
仿真和实验结果表明,所提控制策略能够在全域范围内实现感应电机的稳定运行,有效提高系统稳定性。
关键词:无电解电容变频器;无功电流;感应电机;谐振抑制中图分类号:TM732文献标识码:ADOI :10.19457/j.1001-2095.dqcd24931Research on Bus Voltage Oscillation Suppression of Electrolytic Capacitor -less InverterYANG Yifan 1,YIN Han 2,LU Zhiye 3,YU Xueying 3(1.Aerospace Architecture Design and Research Institute Co .,Ltd .,Beijing 100162,China ;2.Shenyang Aerospace Mitsubishi Motors Engine Manufacturing Co.,Ltd.,Shenyang 110179,Liaoning ,China ;3.Institute of Electrical and Information ,Northeast Agricultural University ,Harbin 150030,Heilongjiang ,China )Abstract:In order to solve the problems of large volume and short service life of the traditional electrolytic capacitor frequency converter ,the thin film capacitor was used to replace the electrolytic capacitor to constitute the AC -DC -AC frequency converter without electrolytic capacitor.Aiming at the problem of bus voltage oscillation in the process of low frequency V/F operation of electrolytic capacitor-less inverter ,firstly ,the bus voltage ripple and resonance in different working modes were analyzed according to the equivalent circuit model of induction motor ,and the stability condition of electrolytic capacitor-less drive system was analyzed by using Rous stability criterion.Secondly ,according to the mathematical model of the drive system without electrolytic capacitor ,the relationship between the bus voltage and the stator reactive current during the oscillation process was analyzed.Finally ,a reactive current feedback control strategy based on stator voltage direction was proposed to suppress bus voltage oscillation and improve system stability.The simulation and experimental results show that the proposed control strategy can realize the stable operation of the induction motor in the global range and effectively improve the stability of the system.Key words:electrolytic capacitor-less inverter ;reactive current ;induction motor ;resonance suppression作者简介:杨逸帆(1991—),男,硕士,工程师,主要研究方向为电机驱动控制与故障诊断,Email :***********************无电解电容变频器的母线电压振荡抑制研究杨逸帆1,尹晗2,陆治冶3,于雪莹3(1.航天规划设计集团有限公司,北京100162;2.沈阳航天三菱汽车发动机制造有限公司,辽宁沈阳110179;3.东北农业大学电气与信息学院,黑龙江哈尔滨150030)近年来,通用变频器在工业传动的诸多领域都得到了广泛的应用,现在变频器拓扑普遍采用交-直-交变换结构,通过直流母线电容实现整流侧和逆变侧的隔离,同时直流电容为逆变模块提供稳定的直流电压[1]。
《电机与控制应用》2013年总目次(卷终)
枟电机与控制应用枠2013年总目次(卷终)综述直线电机在制造业中的应用及发展趋势 王会永,满忠雷,李向男,等(3·1)…………2012年电动机进出口分析及2013年出口预测 孙广彬,张 森,张生德(5·1)……………电动汽车技术的发展研究(待续) 程启明,吴 凯,王鹤霖,等(6·1)…………电动汽车技术的发展研究 程启明,吴 凯,王鹤霖,等(8·1)…………感应电机磁链观测及矢量控制低速发电运行控制 方法综述 宋文祥,周 杰(11·1)………研究与设计异步电动机的建模仿真方法 吴登国,李晓明(1·1)………………………牵引用低压大电流永磁直流电机结构设计 杨惠忠,商丹丹(1·6)………………………高能量密度电机水冷系统设计与选用 钱 洪(1·9)………………………………大型干式潜水电机定子电场分布特性对绝缘的 影响 程晓巍,鲍晓华,方 勇,等(2·1)…………电动负载模拟系统的设计与仿真 张兆恒,褚建新,毕如林(2·6)……………三相感应电动机突加阶跃负载及瞬间断电重新 投入电网时的动态仿真 冯 涛,王同功(2·10)………………………时间谐波对电机空载铁心损耗的影响 吴艳红,王鸿鹄,周玮杰(2·14)……………基于YJ205A变频电机的盾构机刀盘驱动 苟军善,黄新宇,龚文忠,等(3·5)…………圆筒型永磁同步直线电机绕组分析 刘星桥,黄新光,王 燕,等(3·8)…………超高效率三相异步电动机的一种设计方法 朱 楷,卢 芳,马南坪,等(3·13)…………1.5MW双馈风力发电机振动研究 陈纪军,尹曾锋,张越雷,等(3·17)…………基于动态模糊神经网络的开关磁阻电机电感与 磁链特性建模 许爱德,李 涛,马小博(4·1)……………低速工况下感应电机转子磁链在线辨识方法 张今朝,魏海峰(4·6)………………………基于ANSYS的开关磁阻电机定子振动模态分析 赵天环,高国旺,王卫民,等(5·6)…………基于Web的电机仿真试验平台开发 陈显彪(5·10)………………………………十五相电机电磁场的三维有限元分析 宋文宇,张宇娇,吴艳秋,等(6·7)…………基于Ansoft的爪极发电机漏磁分析与优化设计 刘金鹏,庄圣贤,周 娟,等(6·11)…………基于遗传优化支持向量机的开关磁阻电机非线性 建模方法 夏泽坤,宋受俊,班敬轩,等(6·14)…………轴向磁场调制型磁力齿轮设计与验证 王 杰,曹海东,黄苏融(6·20)……………单相电机定子不等齿宽设计及有限元分析 娄志刚,赵新超,杜荣法(7·15)……………基于永磁同步电机的无刷直流电机建模仿真 殷 帅,吕彩琴,王 凯,等(7·19)…………谐波起动异步电机的起动性能分析 郑宜锋,韦文武(7·24)………………………基于TMS320F2812的异步电机参数离线辨识 系统 陈康平,曾岳南,李海波,等(8·5)…………基于扩展卡尔曼滤波器定子磁链观测器的仿真 陈 勋,杜清潭,郭其峰(8·9)……………基于FPGA的虚拟异步电机系统的半实物实时 仿真 黄苏融,黄 艳,高 瑾,等(9·1)…………基于温度场计算的开关磁阻电机冷却系统设计 宋受俊,张 蔓(9·6)………………………面向舰船电力系统方案评估的发电机参数辨识 方法 回志澎,寿海明(9·12)………………………同步发电机励磁试验平台的研究 向 增,刘觉民,韩 兵(9·15)……………箱式高压电机冷却系统设计 万丽娟,李连生,曹 亭(9·19)……………综合分析槽配合与定子振动特性降低电动机电磁 噪声 张 维,黄 坚(10·1)……………基于转子绕组呈弓形规律对称分布同心式结构的 无刷双馈发电机的设计与研究 夏 冰,陈 鹏,李浩源,等(10·6)………充水式潜水电机按温升进行优化设计的新方法 及其应用 王灵沼(10·9)…………………基于嵌入式处理器的同步发电机双机热备励磁 调节器的设计 袁 宁,刘 培,江忠龙(10·12)……………汽轮发电机定转子三维温度场仿真计算 余中军,王 东,郭云珺(11·8)……………自备电源励磁主电路的设计及仿真 国 江(11·12)………………………………考虑参数非线性的内置式永磁同步电机半实物 实时仿真 高 瑾,姜淑影,张建忠,等(11·17)………·ⅰ·小功率电动车用串励直流电机的优化设计 王云龙,曹 翼,李光耀,等(11·23)………电压偏差条件下笼型异步电机损耗特性试验 王翔宇,赵海森,李和明,等(11·27)………永磁推进电机损耗及冷却效能分析 张 松,张立春(12·1)……………………V型永磁体分段转子结构的弱磁性能分析 陈尔奎,颜景浩,包日南,等(12·5)………车用永磁同步电机铁耗的快速计算方法 张 涵,谢宝昌,张舟云,等(12·9)………涡旋压缩机用铜包铝线电机设计 王廷奇,刘玉环(12·15)……………………控制与应用技术基于DSP+CPLD的车用开关磁阻电机驱动控制 系统的设计 张 超,全 力,朱孝勇,等(1·13)…………一种转矩优化的异步电机弱磁控制方法 邓 伟,赵继敏(1·17)………………………基于积分分离的永磁同步直线电机PID控制系统 韩明文,刘 军(1·22)………………………基于线切割机床的电机控制系统设计与实现 刘学文(1·25)………………………………小型面状天线空间运动的伺服电机控制系统设计 刘学文(2·18)………………………………同轴联接双电机驱动系统建模及仿真 朱洪志,宋文祥,董 英(2·23)……………粒子群算法优化扩展卡尔曼滤波器电机转速估计 林国汉,章 兢,刘朝华,等(2·28)…………基于单片机控制步进电机的小车位移研究 贾志成,李春爽(2·34)………………………基于模块化多电平的光伏逆变器仿真 蒋辰晖,王志新,吴定国(2·39)……………基于电流滞环跟踪型PWM逆变器的异步电动机 间接矢量控制 王永杰,陈伟华(3·20)………………………控制系统对无刷直流电机偏心故障的影响分析 赵向阳,王峥浩(3·24)………………………交流电机控制策略研究进展 邹 宇,向凤红,王剑平,等(3·30)…………五自由度无轴承永磁同步电机非线性动态解耦 控制 徐 荣,诸德宏,卢立户(3·37)……异步电动机按定子磁链定向的电压矢量型控制 策略 崔连香(3·44)………………………基于非线性跟踪微分器的异步电机前馈控制 陈友焰,毕淑娥,游林儒,等(4·37)…………基于能量再生的电机浪涌电压抑制方法 聂海龙,王明渝,徐四勤,等(4·41)…………基于FPGA的三电平逆变器模型预测电流控制 策略数字实现 王从刚,何凤有,曹晓冬(4·47)……………一种三相交流电机正反转固体控制器的设计 刘秀梅(4·51)………………………………异步电机模糊免疫PID矢量控制系统 何基都,郑永军,谭 彧,等(5·13)…………基于ITSE准则的永磁同步电机位置伺服系统 调节参数优化设计 何春晗,李 璀(5·16)………………………船舶永磁推进电机直接转矩控制的比较 任俊杰,刘彦呈,郭昊昊(5·20)……………基于最大转矩电流比的永磁同步电动机矢量控制 田以涛,王 英(5·25)………………………永磁交流伺服系统转动惯量辨识方法 姚 磊,邱 鑫,王慧贞,等(5·29)…………基于无功功率观测器的永磁同步电机矢量控制 朱亚娟,廉晨龙,谷建明,等(6·24)…………永磁同步电机直接转矩控制及仿真 冯 涛,陆 华(6·27)………………………无刷直流电机的定频积分控制 贺虎成(6·32)………………………………基于矩阵变换器的异步电机直接转矩模糊控制 耿东昱,邹俊忠,张 见,等(6·35)…………三电平逆变器驱动的感应电机模型预测直接转矩 控制系统 王从刚,曹晓冬(7·27)…………直驱式永磁同步电机伺服系统死区补偿方法 牛威昆,许海平,薛劭申,等(7·32)…………轴向磁场磁通切换型永磁电机矢量控制 裴召刚,林明耀,赵纪龙,等(7·37)…………基于线性化扩展卡尔曼滤波器的空心杯永磁同步 电机控制系统 胡 威,邵定国,朱李超(7·43)……………矿山牵引电机车控制系统的仿真 宗 剑,阮 毅,徐立波(8·14)……………一种改善永磁同步电机伺服精度的重复控制方法 孙铁成,徐三玲,王 钰,等(8·19)…………智能优化PI参数的永磁同步电机控制 崔业兵,向方明,朱遵义,等(8·23)…………无刷双馈感应电机直接转矩控制系统中的磁链 观测方法 马 赟,许永顺,王 昕,等(8·29)…………集肤效应对高密度永磁电机温升的影响 张 琪,张 俊,黄苏融,等(8·35)…………船用异步电动机全过程噪声控制方法 陆 华,万丽娟(8·40)………………………基于LPC1769芯片的无刷直流电机智能控制 黄海波,兰建平,张 凯(9·22)……………电动机矢量控制的参数优化 范学鑫,马伟明,付立军,等(9·27)…………带有母线电压控制的异步电机矢量控制策略 徐立波,阮 毅,宗 剑,等(9·33)…………基于有功计算控制电机转矩的数字滤波器 韩康玮,姜瀛洲,舒 慧,等(9·39)…………·ⅱ·三电平感应电机模型预测直接电流控制策略 吴轩钦,曹晓冬,王从刚(9·42)……………永磁同步电机直接转矩控制调速系统 涂小卫,杨 影,陈 鑫,等(10·17)………异步电机无速度传感器控制系统转子时间常数 辨识 李海波,曾岳南,蒋西文(10·22)……基于平均电流控制的双闭环改进控制策略 陈亚爱,薛 颖,周京华(10·26)……………无刷直流电机无位置传感器控制系统仿真及试验 研究 焦晓雷,高延丽,潘 劲(10·36)……基于模型预测控制算法的抗饱和转速调节器设计 黄苏融,史 岱,王 爽,等(10·40)………一种永磁同步直线电机端口受控哈密尔顿系统下 的自适应阻尼注入控制方法 刘星桥,王 燕,杨志华,等(11·32)………绕线异步电机双馈调速控制 赵梅花,阮 毅,钟沁宏,等(11·37)………基于FPGA的步进电机多轴联动控制系统 赵立辉,霍春宝(11·42)……………………基于等效正弦分频过调制策略的感应电机软起动 控制系统 李长乐,张 扬,宫玉晓,等(11·46)………基于C8051F120的高精度电机控制脉宽调制 设计 刘 洋,王显军(12·19)……………基于支持向量机广义逆的多电机自抗扰控制 刘国海,胡德水,赵文祥,等(12·23)………城轨交通用磁通反向永磁直线电机的垂向力控制 赵文祥,刘 虎,吉敬华,等(12·29)………基于分层优化的异步电机直接转矩预测控制 荣 强,孙旭东,张 杰,等(12·34)………异步电机参数静态辨识 崔连香(12·39)………………………………运行与保护异步电动机断电后重合闸的非同期冲击和防护 措施 张世文(1·31)………………………基于概率神经网络模型的异步电机故障诊断 李天玉,吴 楠(1·35)………………………基于USB的发电机组振动和噪声故障监测系统 祝龙记,王 杰(1·39)………………………船用三相异步电动机的保护 张立心(2·59)………………………………智能型电动机保护器及其组网应用 言穆昀(2·62)………………………………基于BP神经网络的舰船电机故障诊断 吉 哲,王修敏,张松涛(7·58)……………笼型三相异步电机振动故障解析 王 强,陈金刚(7·61)………………………基于小波包改进盒维数的定子绕组匝间短路故障 诊断 王 莉,刘 进(10·53)……………电动机起动和保护控制器的研究 张平泽(10·58)………………………………降低电机通风噪声的一种可行方案 崔 伟,史建萍,吴若欣,等(11·50)………混合动力汽车用定子永磁型双功率流电机故障 分析与容错控制 火 星,全 力,朱孝勇,等(11·53)………基于阶比分析和支持向量机的异步电机故障诊断 吕建新,黄炯龙,曹红燕,等(12·65)………一种变频供电笼型异步电机转子断条故障诊断的 时频分析法 陈 庆,刘振兴(12·70)……测试技术与检测设备WT1800功率计与KISTLER传感器集成在电机 检测系统中的应用 陈叶荣,吴汉熙,韩宝江等(1·43)…………无传感器无刷直流电机新型监控系统的设计 白晋川,程小华(1·47)………………………锥形转子制动电动机轴向磁拉力测试装置 王传军,夏勇琳(3·50)………………………航天测量船伺服直流电机测试系统设计与实现 金华松,孙永江,刘 军,等(3·53)…………宽带功率测试系统在电机试验中的应用 陆 翔,陈亦新,唐秀峰(3·57)……………基于LabVIEW的电机型式试验数据采集系统 孟超群(5·42)………………………………小功率电动机加载方式简析 黄佩佳,邵 媛,徐秉俊,等(5·45)…………永磁同步电机转子位置检测技术 陈亚爱,陈 成,周京华(7·47)……………核电1000MW发电机定子绕组电气绝缘耐压 试验标准的探讨 江 欣,陈 琪,杜亚平(7·53)……………船用中频电站技术要求及测试标准研究 程 辉(7·55)………………………………锥形转子电机轴向磁拉力测试的研究 苏文胜,百坚毅,顾旭波,等(9·46)…………异步电机分布式在线检测及控制系统的设计 陈 萍,孙志锋(9·49)………………………变频调速与应用转速估算在高压电机变频器节能改造上的应用 穆天柱,刘春松,胡 炫(1·51)……………高压变频器工变频切换功能的研究与应用 梁安江,张宝清(1·55)………………………煤矿直流架线电机车变频驱动装置 李玉东,卢 杉,杜庆楠,等(4·54)…………变频恒压供水系统的Smith预估复合控制 尹 超,李茂军,张 静(4·58)……………一种用变频调速装置的电参量有效值测量算法 王爱元(5·49)………………………………节能变频器叠层母线的设计 沈 瑾(5·53)………………………………空间矢量调制的直接转矩控制变频调速试验平台 孙铁成,高德艳,鞠雪强,等(6·53)…………·ⅲ·有源前端级联型多电平高压变频器的矢量控制 技术 张 亮,陈国栋(6·57)………………永磁同步电机调速系统的模糊自抗扰控制 薛 薇,路鸦立(8·57)………………………变频器在中央空调节能系统中的应用 苏丽秋,李振平(8·61)………………………一次风机变频改造及RB功能优化 朱志军(10·63)………………………………基于32位DSP的高压变频器电流电压采样电路 刘 丽,冯东升,王 涛(10·67)……………新能源与风力发电直驱永磁风力发电机空载短路去磁分析 雷向福,张 颗,王步瑶,等(1·60)…………大型双定子直驱永磁风力发电机电磁设计与仿真 肖珊彩,秦 明(2·45)………………………双馈感应风力发电机在三相短路故障下暂态电流 特性分析 徐 岩,卜凡坤,杨超楠(2·51)……………浅谈永磁风力发电机磁钢粘接用胶黏剂的测试与 选择 李卫华,易晓波,姚建荣,等(2·56)…………基于PSCAD的直驱式风电机组运行特性仿真 齐尚敏,李凤婷,石 岩(4·12)……………风电机组状态监测系统现状 董昱廷,王海云,唐新安(4·17)……………MW级高速永磁风力发电机高温短路时永磁体 失磁研究 李志鹏,龚天明,李 广,等(4·22)…………基于混沌优化算法的风力发电机组控制器设计 秦 斌,刘 念,张 榆,等(4·28)…………全功率永磁直驱风电机组暂态稳定性研究 罗建春,晁 勤,袁铁江,等(4·32)…………风力发电机三维温度场的数值模拟 张海凤,贾志超,赵 海,等(8·43)…………小型风力发电机用永磁轴承参数设计 赵俊峰,朱熀秋(8·47)………………………并网型异步风力发电机电力系统稳定器控制与 仿真 田中伟,吴政球,龚志敏(8·52)……直驱式永磁风力发电机的瞬态磁场有限元分析 马巧丽,林瑞全,丁旭玮(9·53)……………MW级直驱永磁风力发电机定子铁心叠压装置及 工艺 时兴华(9·59)………………………高速永磁同步风力发电机过载能力的研究 李 华,李进泽,龚天明(9·62)……………双馈风力发电空载并网与解列控制策略 谈 立,阮 毅,赵梅花,等(12·42)………变速恒频双馈风力发电系统的统一数学建模及 运行仿真 王 武(12·47)…………………直驱风电系统双PWM变流器无源混合控制 马先芹,王久和,董婷婷(12·51)……………工艺与材料闭口槽转子压铸排气工艺 王 岳(2·65)………………………………220MW空内冷汽轮发电机连接环焊接工艺 李培德,肖 凡,谭国良(3·60)……………电机系统节能高效电机在氨制冷机系统中的应用 强 雄,邵 媛,周玮杰(3·62)……………JF9962VPI浸渍树脂性能研究 李 宏,何少波,夏 宇(11·59)……………核电1000MW发电机定子线圈三相直流耐压泄 漏电流不平衡原因分析 江 欣,陈 琪,杜亚平(11·62)……………降低高压隔爆电机定子绕组破压率的探讨 张晓亮,周少正,侯青杨,等(11·64)………产品介绍及应用TFW75004隐极同步发电机转子线圈制造工艺 张敬龙,朱勇穗(4·62)………………………5600kW空气压缩机电机磁平衡保护应用 潘利武,史涛涛,孙军威(4·64)……………YRKK8001010kV型绕线式三相异步电动机的 研制 解育男(5·36)………………………Y2、YX26kV紧凑型高压高效率大功率三相异步 电动机的研制 舒冬冬(5·39)……………电机空冷器制造工艺改进 谢常春,苏启明,梁子慧(6·60)……………风扇磨用YFM800121200kW6kVIP54电机的 研制 解育男(8·66)………………………新能源汽车技术电动汽车无速度传感器矢量控制系统 刘诗敏,李优新,黎 勉,等(6·40)…………单控制器轮驱电动汽车驱动装置 郭龙舟,张 辉,支 娜,等(6·45)…………纯电动汽车用电机调试软件设计 李 豹,张 云,朱孟美,等(6·49)…………电动汽车用外转子开关磁阻电机设计与控制系统 仿真 韩 帅,王 艳,殷天明(10·45)……车辆用交流发电机发电性能仿真分析计算方法 张志华(10·50)………………………………电机系统节能高效电机检测技术 李巧莲,韩宝江(7·1)………………………新型高效永磁同步发电机技术研究 姚丙雷,张宝强(7·6)………………………超高效电机的关键制造技术 闫 锋,玉佳彬(7·9)………………………高效电机在压铸机设备上的应用 李振平,段国玉(7·13)………………………高压风机在流量调节中的喘振研究及应用 王 辉,冯东升(12·57)……………………压缩机专用电机高效风扇的研究 金 晶,邹淑芳,张惠英(12·61)……………·ⅳ·。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S T M3 2 F 1 0 3处理器完成该算 法的软件实现 , 并在 l 1 k W 机 组试 验平 台上进行 相关 控制策 略的验证 。试验结果 表明 , 所提 出的方法具有 良好 的起动特性 , 与仿 真结 果吻合。
关键词 : 异步 电机 ;软起 动 ; 离散分频 ; 触发 角 ; 过调制 中图分类号 : T M 3 0 2 文献标志码 : A 文章编号 : 1 6 7 3 - 6 5 4 0 ( 2 0 1 3 ) 1 1 - 0 0 4 6 - 0 4
摘 要 :在传统晶闸管软起动拓扑基础上 , 借鉴变频器 的 V V V F理论 , 提 出了基于等效 正弦控制 , 并且利
用过调制方式提升相 电流 的基波含量 。通过软 件算法优 化感应 电机 的起 动 , 达到起 动重载 和低 速调 速 的 目 标 。在 M A T L A B / S i m u l i n k中建立了等效正弦 离散 控制 的 6阶段控 制 系统 , 验证 了提 出 的过调 制理 论 ; 基 于
L /C h a n g l e , Z H A N G y 0 , G D Ⅳ G Y u x i a o , S H I Z h e n x i n g , L I B i n g , Z H A N G Me i j u a n ( S h a n g h a i S e a r i — E l e c C o . , L t d . , S h a n g h a i 2 0 0 0 6 3 , C h i n a )
Ab s t r a c t :A t o p o l o g y o f i n d u c t i o n mo t o r s t a r t i n g o n t h e b a s i s o f t h e t r a d i t i o n a l t h y r i s t o r s o f t s t a r t e r i n c l u d i n g s o f t w a r e lg a o r i t h ms t o s t a r t h e a v y l o a d a n d l o w s p e e d g o v e r n o r w a s p r o p o s e d .T h e i f r s t t i me ,p u t f o r w a r d t h e b a s i c p r i n c i p l e o f e q u i v a l e n t s i n u s o i d a l c o n t r o l i f in r g a n g l e ,a n d t h e u s e o f mo d u l a t i o n s c h e me s t o e n h a n c e t h e f u n d a me n t a l c o n t e n t o f t h e p h a s e c u r r e n t ,s i mi l a r t o VVV F o f f r e q u e n c y c o n v e r t e r .T h r o u g h MAT L AB / S i mu l i n k t h e e q u i v a l e n t s i n e
d i s c r e t e c o n t r o l s t a g e c o n t r o l s y s t e m v e i r i f e s t h a t t h e i f i r n g a n g l e c lc a u l a t i o n p in r c i p l e s a n d a p p l i c a t i o n o f mo d u l a t i o n
Co n t r o l S y s t e m f o r I n d u c t i o n Mo t o r S o f t S t a r t Ba s e d o n Eq u i v a l e n t S i n e Di s c r e t e a n d Ov e r Mo d u l a t i o n S t r a t e g y
控制与应用技术
E U C A
迫击 乙 与粒 制 应用 2 0 1 3 , 4 0( 1 1 )
基 于等 效 正 弦 分 频 过调 制策 略 的 感应 电机 软 起 动控 制 系统
李长 乐 , 张 扬 , 宫玉晓 , 史振 上海 2 0 0 0 6 3 )
t h e o r y wa s c o r r e c t ;B a s e d o n S T M3 2 F 1 0 3 C P U,a l g o it r h m— b a s e d s o f t w a r e i mp l e me n t a t i o n w a s c o mp l e t e d,t h i s c o n t r o l s t r a t e g y o n 1 1 k W u n i t e x p e i r me n t a l p l a t f o r m wa s v e i r i f e d .Ex p e r i me n t a l r e s u h s s h o w e d t h a t t h e p r o p o s e d me t h o d h a s a g o o d s t a t r — u p c h a r a c t e is r t i c . Ke y wo r d s:a s y n c h r o n o us mo t o r ;s o f t s t a r t e r ;d i s c r e t e f r e q u e n c y;f i r e a n g l e;o v e r mo d u l a t i o n