第18章分析力学基础动力学普遍方程拉格朗日方程.ppt
理论力学(Ⅱ)—拉格朗日方程

C
yC
M
g B
ma g 2
其中
M
g A
1 2
mR21
FBg ma
M
g B
1 2
mR2 2
此系统具有两个自由度,取轮A、轮B的转
角1、 2 为广义坐标。给系统一组虚位移,如图。
1
yC R 1 R 2 (1)
N
miri
k 1
ri qk
qk
Nn
(
k 1 i1
mi
ri
ri qk
)qk
ri
N k 1
ri qk
qk
n
i 1
Fi
δ
n
ri
i1
miai
δ
ri
N
(Qk
k 1
n i1
miri
ห้องสมุดไป่ตู้
ri qk
)qk
0
Qk
n i 1
xA l cos yA l sin xB l cos
O1
x1
rA
l l rB
FIA A m1g l
rC l
B
m1g
FIB
C
yB l sin
m2g
yC 2l sin
y1
2m1lsin2lcos 2m1glsin 2m2glsin 0
sin
1 g
(a1cos
3 2
ar
)
分析力学基础-拉格朗日方程
其他应用领域
要点一
机器人学
在机器人学中,拉格朗日方程被用于描述机器人的运动规 律。通过建立机器人运动的拉格朗日方程,可以求解出机 器人的关节角度和速度,为机器人的运动控制提供理论依 据。
要点二
生物力学
在生物力学中,拉格朗日方程也被应用于描述生物体的运 动规律。例如,在分析动物的运动行为或人体姿势控制时 ,可以使用拉格朗日方程来描述生物体的运动状态和变化 规律。
解析解法的优缺点分析
优点
解析解法可以得到系统的精确解,适用 于简单模型和特定条件下的复杂模型。
VS
缺点
对于复杂模型,解析解法可能非常困难甚 至无法求解,需要借助数值方法或其他近 似方法。
04
拉格朗日方程的数值解法
数值解法的概念和步骤
概念
数值解法是一种通过数学计算来求解数学问 题的方法,它通过将问题离散化,将连续的 问题转化为离散的问题,然后使用计算机进 行计算求解。
步骤
1.建立数学模型:根据实际问题建立数学模 型,将实际问题转化为数学问题。2.离散化 :将连续的问题离散化,将连续的时间和空 间划分为若干个小的单元,每个单元称为一 个网格点或节点。3.求解离散化后的方程: 使用数值方法求解离散化后的方程,得到每 个网格点的数值解。4.后处理:对计算结果 进行后处理,提取所需的信息,并进行分析
分析力学基础-拉格 朗日方程
目录
• 引言 • 拉格朗日方程的推导 • 拉格朗日方程的解析解法 • 拉格朗日方程的数值解法 • 拉格朗日方程的应用领域
01
引言
拉格朗日方程的背景和重要性
背景
拉格朗日方程是分析力学中的基 本方程,它描述了系统的运动规 律。
重要性
拉格朗日方程在理论物理、工程 技术和科学研究等领域有着广泛 的应用,是理解和研究复杂系统 运动行为的关键工具。
2_拉格朗日方程
O
(x1,y1)
A
P1
(x2,y2) B(x3,y3)
P2
F
(1)
由已知条件可得
x1
1 2
l1 sin 1 l 2 sin (2)
x 2 l1 sin
2 y 3 l1 cos l 2 cos
把(2) 式代入(1) 式得
P1 (
1 2
l1 sin ) P2 ( l1 sin
x i x i ( q1 , q 2 , , q s , t ) y i y i ( q1 , q 2 , , q s , t ) z i z i ( q1 , q 2 , , q s , t )
或 式中
( i 1, 2 , , n , s 3 n )
ri ri ( q 1 , q 2 , , q s , t )
以上分量式若改用s 个独立广义坐标表示,然后令s 个独立的 虚位移前的乘数等于零,则可得出所求的平衡条件。 若求约束力,则要利用拉格朗日未定乘数。 广义坐标下 ri 的虚位移为
ri
n
s
ri
由此得广义坐标下的平衡方程是
W
Q
1
q
q 0
s
F
i 1 s
n
i n
i 1
虚功原理:受理想约束的力学体系平衡的充要条件是此力学 体系的诸主动力在任意虚位移中所做的元功之和为零。这就 是虚功原理,也叫虚位移原理。是1717年伯努利首先发现。 对于理想约束体系,利用虚功原理可以方便的求出主动力满 足的平衡条件,但无法求出约束反力。 由于约束,3n 个坐标不独立,即作用在任一质点上的合外 力在虚位移方向上的投影,一般不会全令之为零。否则就可 能变成n 个自由质点的平衡方程。
动力学普遍方程和拉格朗日方程

(i 1,2,......... .n)
对这n个式子求和
(25.2)
iq
(F N F
i 1 i i
n
) r i 0
(25.3)
若为理想约束,由虚位移和理想约束的条件知
N r
i 1 i
n
i
0
上式变为:
(F F
i 1 i
n
iq
) r i 0或者 (F i mi ai ) r i 0 (25.4)
s
k 2 2 i i i s j 1 j s j s k i i j 1 j s j s
即
v q
r
i s
r d ( ri ) dt q
s
也可以写为
v q
r
i j
r d ri ( ) dt q
j
n
或
r q
r
i j
r d ri ( ) dt q
j
j
( j 1,2...k )
r 在任意瞬时,加速度为a
i
根据达朗伯原理,在其上加达朗伯惯性力
r r mi ai F iq
则
约束反力的合力
r rr F N F
i i
0
iq
(i 1,2,......... .n)
(25.1)
达朗伯惯性力
作用于此质点上 的主动力的合力
点积虚位移 ri
( F i N i F iq) r i 0
对时间求导
得到
q
vi
j
q
ri
j
或
q ri
j
( j 1,2...k )
最新理论力学-拉格朗日方程教学讲义ppt

m2g
此为一个自由度质点系,选角α为
广义坐标。
y
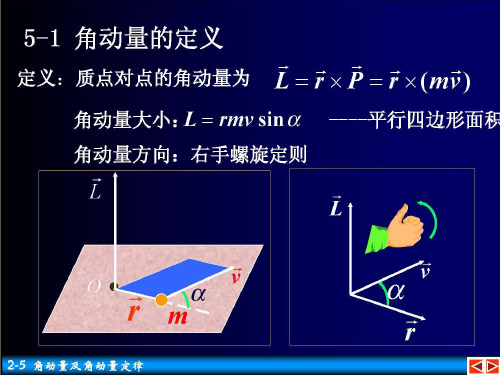
第七章 拉格朗日方程
§7-1 动力学普遍方程
例题 7-1
δrB F*B B
m1g δrC
d
O
α
x
ω dα
δrA A F*A
m1g
C
m2g
各质点的虚位移可用广义坐标的
变分表示
xA(dlsi n), xAlcos
yAlcos
yAlsin
xB(dlsi n),xBlcos
yBlcos,
yBlsin
yC2lcos, yC2lsin
y
第七章 拉格朗日方程
δrB F*B B
m1g δrC
§7-1 动力学普遍方程
例题 7-1
F A * x A F B * x B m 1 g y A m 1 g y B m 2 g y C 0(a)
d
O
α
x
ω dα
δrA A F*A
理论力学-拉格朗日方程
动力学
第 七
§7– 1 动力学普遍方程
章
拉
格
§7–2 拉格郎日方程
郎
日
方
程
§7–3 拉格郎日方程的第一积分
目录
第七章 拉格朗日方程
§7-1 动力学普遍方程
第七章 拉格朗日方程
第七章 拉格朗日方程
第七章 拉格朗日方程
第七章 拉格朗日方程
§7-1 动力学普遍方程
n
(Fi Fi*)ri 0
m1g
C
m2g
y
代入式(a)得
2m 1(dlsi n)2lcos2 m 1gsli n 2m 2gsli n 0
动力学普遍方程及拉格朗日方程

O1
x1
δα
l α α l
A
− FIA ⋅ δxA + FIB ⋅ δxB + m1g ⋅ δyA + m1g ⋅ δyB + m2 g ⋅ δyC = 0
根据几何关系,有 根据几何关系,
ωB
δrC
δrB FIB
l m1g
xA = −lsinα yA = lcosα xB = lsinα yB = lcosα yC = 2lcosα
由动力学普遍方程, 由动力学普遍方程,得
∑F ⋅ δr −∑m a ⋅ δr
i =1 i i i =1 i i
n j j
N
N
i
=0
∑F ⋅ δr = ∑Q δ q
i =1 i i j =1
N
Q j ——广义力
n N ∂ri ∂r && ⋅ ∑ δ qj = ∑(∑mi && ⋅ i )δ qj ri ∑miai ⋅ δr i = ∑miri j=1 ∂qj ∂qj i =1 j =1 i =1 i =1
MI2 = J2 α2
J2 = 1 m2 R2 2
α
m2 g
B
x
m1g
ar = Rα2
m2 gsinα ⋅ Rδϕ + FI2ecosα ⋅ Rδϕ − FI2r ⋅ Rδϕ-J2α2 ⋅ δϕ = 0
1 3 sinα ⋅ + (a1cosα − ar ) = 0 g 2
解:4、应用动力学普遍方程 令: δ x ≠ 0,δ ϕ = 0
i i i i i
(i = 1,2, ⋅⋅⋅, N)
动力学普遍方程的直角坐标形式
∑[(F
分析力学拉格朗日方程
分析力学拉格朗日方程分析力学是物理学中的一个重要分支,它主要研究物体的运动规律和力学系统的宏观性质。
拉格朗日力学是分析力学的基础,是分析力学发展过程中的一个重要理论。
它由意大利数学家拉格朗日于18世纪发展而来,利用广义坐标和拉格朗日方程来描述物体的运动学和动力学。
在拉格朗日力学中,系统的运动由极值原理来决定。
这个极值原理是“达朗贝尔原理”,即系统的运动满足使作用量(S)是极值的路径。
作用量是拉格朗日力学中的一个重要概念,它表示物体在运动过程中所受到的所有力的作用。
具体来说,作用量可以表示为:S = ∫ (L - T) dt其中,L是拉格朗日函数,表示系统的动能和势能之差;T是系统的动能,表示物体的运动能量。
积分表示对整个运动过程的积分求和。
根据达朗贝尔原理,系统的运动满足作用量的极值条件,即δS=0。
为了使作用量的变分δS等于零,我们可以通过拉格朗日方程来推导系统的运动方程。
假设系统有n个自由度,我们引入广义坐标q1, q2, ..., qn来描述系统的位置。
每个广义坐标都是关于时间的函数,即q(t)。
拉格朗日函数L也是广义坐标的函数,即L(q, dq/dt, t)。
其中dq/dt表示广义坐标的时间导数。
利用拉格朗日函数,我们可以定义拉格朗日方程:d/dt (∂L/∂(dq/dt)) - ∂L/∂q = 0这个方程就是拉格朗日方程。
其中∂L/∂(dq/dt)表示拉格朗日函数对广义速度的偏导数,∂L/∂q表示拉格朗日函数对广义坐标的偏导数。
该方程描述了系统在广义坐标下的运动规律。
拉格朗日方程的推导过程是基于变分法和哈密顿原理的。
通过对作用量进行变分,我们可以得到极值的条件,即达朗贝尔原理。
然后利用这个极值条件,我们可以推导出拉格朗日方程。
拉格朗日方程在物理学中有着广泛的应用,不仅可以用来描述质点的运动,还可以用来描述刚体的运动、连续介质的运动、以及相对论力学等。
它提供了一种统一的描述物体运动的方法,同时也为我们研究物体的宏观性质提供了一个有力的工具。
大学物理优质课件精选——分析力学拉格朗日方程课件

系统自由度数目:3N-(3N-S)=S →力学体系只有S个独立变量。
约束的分类
1. 约束方程 2. 约束方程
中不含时间t ——稳定约束 中含时间t ——不稳定约束
约束另外的分类1:可解约束与不可解约束
1. 由不等式表示的约束——可解约束: 质点在某一方 向上能脱离的那种约束
2. 由等式表示的约束——不可解约束: 质点始终不能 脱离的那种约束
分析力学
教材:理论物理基础教程
——分析力学部分
绪论
Ⅰ 分析力学是怎样的一门学科?
Ⅱ 怎样学好分析力学?
Ⅰ 分析力学是怎样的一门学科?
力学:主要指牛顿力学
普通物理
光学 热学
感性认识 建立在实验的基础上
大
电磁学
学
物
原子物理学
理
理论力学:核心是分析力学
理论物理 (四大力学)
热力学与统计物理
电动力学 量子力学
4. 正则共轭坐标(第6章)
坐标概念的第三次飞跃
§1.1.1 无约束质点的拉格朗日方程
推导拉格朗日方程的方法之一:从牛顿方程出发推导 两种情况:1.不受约束的质点;
2.受约束的质点。(两种情况均在保守力场中) 注意:约束的概念、约束性质(限制物体相互位置的
性质)、保守力场的概念 约束:在一个力学体系中,存在着一些限制各质点自由运动 的条件,我们把这些条件叫做约束。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
W2
r2
P
r2
W1
l1 2
sin
11
W2r2
sin
1
Pr3
c
os1
P
c os1
(W1 2
W2
) sin
1 l11
C1
r1
rA
W1
r2
r3
C2
P
W2
(a)
所以,对应1的广义力为
Q1 W1 2
W2 ) sin 1l1
6
② 再令2≠0、1=0,如图(b)。 所有力在此虚位移上的虚功为: WF mA (W2 ) 2 mA (P) 2
W2
l2 2
sin2 2
Pl2 2
cos2
C1
(P
cos2
W2 2
i 1
n
(Fi Ni FIi ) ri 0
i 1
理想约束:
n
Ni
ri
0
i 1
(1)
n
或
[( X i mxi ) xi (Yi myi ) yi (Zi mzi ) zi ] 0 (2)
i 1
或
ΣWF ΣWFI 0
Q2
3 i 1
Xi
xi
2
Yi
yi
2
Zi
zi
2
(P cos2
W2 2
sin 2 )l2
5
解2:(几何法)选1、2为广义坐标,对应虚位移为1、2。
① 先令1≠0、2=0,如图(a)。所
有力在此虚位移上的虚功为
ΣWF
mO (W1)1
一、广义力的概念
§18-1 广义力
质点系任一质点坐标可用广义坐标 qh ( h = 1,2,…,k) 表示:
ri
ri
(q1,
q2
,,
qk
)
i 1,2,, n
求变分,得用广义坐标 变分表示的虚位移:
ri
k h1
ri qh
qh
i 1,2,, n
对应第 h 个广义坐
该质点上的力所作虚功:
标的广义
Wi
Fi
ri
Fi
k
(
h1
ri qh
qh )
k h1
Fi
ri qh
qh
力 i 1,2,, n
整个质点系上所有(主 动)力所作虚功:
Qh
n i 1
Fi
ri qh
h 1,2,, k
(3)
即,对动力学问题,给系统加上惯性力,再应用虚位移原理即可解题。
注:①上式中不一定指质点,而一般可理解为力或力偶个数;
②当质点系静止时(静平衡),ΣWFI 0 ,退化为虚功方程:
WF 0
8
解题步骤: (一)研究整体(若求反力,需先去其约束,画上约束力); (二)画主动力,并加惯性力(偶),画运动图;给系统虚位移; (三)列解方程。
WF
n
Wi
i 1
n i 1
(
k h1
Fi
ri qh
qh
)
k h1
(
n i 1
Fi
ri qh
)qh
k
Qhqh
h1
3
二、广义力的求法
1. 解析法——由各力及其作用点求
Qh
n i 1
Fi
ri qh
Qh
WF qh
4
例1 (书上例17-10)
计算双摆的广义力,已知摆长各为l1、l2,
重量各为W1、W2,力P。(2自由度)
C1
解1:(解析法)建立坐标系如图。选1、
2为广义坐标。
C2
各力在坐标轴上的投影为
W1
P
X1 W1, X 2 W2 , Y3 P
W2
各力作用点坐标为
x O
即,一个变分方程可对 应几个独立的代数方程: 独立代数方程数 = 广
x y ——广义坐标的变分
义坐标数
X , Y , mC (F ) ——虚功表达式中广义坐标的
变分的系数,称为广义力Qi
可见,虚功方程等价于 Qi = 0 (i = 1, 2, ... , k)
1
注1:
sin 2
)l2
2
所以,对应2的广义力为
Q2
WF 2
(P
cos2
W2 2
sin2
)l2
W1
r2
r3
C2
P
W2
(b)
§18-2 动力学普遍方程
回到动力学问题上来。
达朗贝尔原理 虚位移原理
动力学普遍方程
拉格朗日方程
拉格朗日是分析力学的创始人。 分析力学的基础
7
动力学普遍方程的思想是: 对n个质点的质点系:
达朗贝尔原理
虚位移原理
动力学问题
形式上的平衡问题
动力学普遍方程
n
(Fi Ni ) 0
i 1
n
(Fi Ni FIi ) 0
i 1
n
(Fi
FIi )
ri
0
i 1
n
(Fi mai ) ri 0
对单个自由刚体,该组方程等同于平衡方程;对非自由质点系, 该组方程不同于平衡方程(见后面例1)。
注2:
①对应每一个广义坐标,有一个广义力; ②广义力是代数量而非矢量; ③广义力不作用在某个物体上,故也无法画出。 在以下(拉格朗日方程)的讲解中,会用到广义力的概念,故下面首 先介绍广义力。
2
第18章 动力学普遍方程 拉格朗日方程
x1
l1 2
c
os1,
x2
l1
cos1
l2 2
c os 2 ,
y3 l1 sin 1 l2 sin 2
代入广义力公式(过程略,你可以再详细些),得
Q1
3 i 1
Xi
xi
1
Yi
yi
1
Zi
zi
1
Pcos1
(W1 2
W2 ) sin 1l1
用虚功方程解决过若干问题, WF 0
问题:用虚功方程可解几个代数未知量?
y
y
看例子——平面平衡自由刚体 几个自由度?
C
x
给刚体虚位移: x y 对应平动
对应转动
WF X x Y y mC (F) 0
X 0, Y 0, mC (F) 0
用直角坐标表示:
h 1,2,, k
Qh
n i 1
(Xi
xi qh
Yi
yi qh
Zi
zi ) qh
h 1,2,, k
2. 几何法——由虚功求
k
质点系虚功: WF Qhqh h 1
若只给定第h个广义坐标的虚位移,其余广义坐标的虚位移为0,则
WF Qhqh