拉臂式垃圾车功能及其原理介绍
垃圾清运车技术参数

垃圾清运车技术参数一、1.5T小型拉臂钩车数量:1辆1.概述1.5T小型拉臂钩车是一种新型的集垃圾收集和运输功能为一体的车辆。
它由汽车底盘和拉臂钩两大部分组成,配套的可卸式垃圾箱通过拉臂钩的整体装卸方式可与车体分离。
垃圾箱可独立作为城市垃圾小型收集站使用,垃圾收集满后,由小型拉臂车运往垃圾转运站或直接运往垃圾处理场倾倒。
该车辆主要用于城市垃圾的一级收集和运输,车辆必须保证装卸箱体时的作业安全,卸料后箱体内无残留垃圾。
2.主要技术参数*底盘型号:SC1024CD32*发动机型号:SD4AE453D功率:45kw;排量:1809ml*尾气排放标准:国川;燃油种类:柴油;轴距:2850mm轮距(前/ 后):1400/1278mm最小离地间隙:》175mm外形尺寸(不含箱体):总长4405mm总宽1670mm总高2045mm最高速度:80km/h;最大爬坡度:》30%最小转弯直径:w 13m;*整备质量(不含箱体):1530kg;*额定载质量:830kg;*整车总质量:2490kg;前悬/后悬:665/890mm接近角/离去角:40/27 ° ;*拉臂钩采用世界知名品牌并提供相应清单和提供第三方拉载试验报告;*拉臂钩起重能力:1.5T ;拉臂钩自重:350kg;*后靠轮进入宽度:860mm自卸倾斜角度:48°;*拉臂钩钩心至后靠轮长度:2125mm*钩心高度:990mm作业时间:w 50s;采用全自动化控制方式,操纵方便、灵活,具有较高的人性化设计;拉臂钩结构件主要材质为特高强度钢板,保证使用寿命不低于8年;底盘与拉臂钩连接部分的材质的屈服极限》235N/mm液压缸均安装安全阀,避免软管爆管或误操作时,垃圾箱下掉。
在驾驶室、地面通过移动操作面板均可对拉臂钩操作控制,能保证驾驶员在驾驶室内完成提箱、卸箱及倾倒垃圾的全部操纵。
拉臂钩出现故障不会影响底盘电气系统的正常工作,也不会影响整车制动系统性能;自卸角度大,能保证车箱内垃圾一次性卸料干净;后防护栏布置合理,不会出现垃圾挂留现象;*锁紧方式采用三点机械锁紧:钩臂与垃圾箱前部锁紧,防止箱体在拉臂车上串动;拉臂钩中部左右限位装置,防止箱体左右摆动;拉臂车锁舌装置与箱体槽形装置配合,防止箱体后部左右及上下跳动;所配驾驶室密封良好,视野开阔;配备有暖风和空调;*主要防腐工艺:采用整体酸洗磷化或电泳的先进防腐工艺,三年内无明显锈蚀痕迹;(提供现场考察)电气、液压系统的关键元器件,均需采用欧美或日本等世界知名品牌元件并提供相应清单及相关证明;*车辆使用寿命不少于7年。
摆臂式垃圾车工作原理

摆臂式垃圾车工作原理宝子们,今天咱来唠唠摆臂式垃圾车这个超有趣的家伙。
摆臂式垃圾车呀,就像是一个超级灵活的垃圾收集小能手。
它的车身呢,就像是一个结实的大盒子,这个大盒子可有大用处啦。
它能够稳稳地装下好多好多垃圾呢。
咱先说说它那个摆臂。
这个摆臂就像是垃圾车的手臂一样,可灵活啦。
它是怎么工作的呢?你看啊,当垃圾车开到垃圾收集点的时候,这个摆臂就开始发挥它的魔力了。
它就像一个热情的迎宾员,不过迎接的不是客人,而是那些脏兮兮的垃圾桶。
这个摆臂有专门的挂钩或者夹具之类的东西。
就像我们的手有手指能抓住东西一样。
它会准确地对准垃圾桶,然后“哗”的一下,就把垃圾桶给抓住啦。
这个过程可迅速了呢,就像闪电侠出手一样快。
垃圾桶被抓住之后呢,摆臂就开始动起来了。
它会像一个大力士一样,把垃圾桶高高地举起来。
这个时候呀,垃圾桶就像是被摆臂捧在手心里的宝贝,不过这个宝贝是装满垃圾的啦。
然后呢,摆臂就会慢慢地把垃圾桶倾斜,就像是我们倒水的时候把水壶倾斜一样。
垃圾桶里的垃圾就会“哗啦哗啦”地倒进垃圾车的车厢里了。
这声音听起来虽然有点乱糟糟的,但是对于垃圾车来说,这就是它完成任务的美妙乐章呀。
垃圾车的车厢也很有讲究哦。
它的内部空间设计得很合理,能够让垃圾尽可能多地装进去。
而且呀,它的车厢底部很结实,能够承受住垃圾的重量。
就像我们的房子要有坚固的地基一样,垃圾车的车厢底部就是它的“地基”呢。
当垃圾桶里的垃圾都倒完了之后,摆臂又会轻轻地把垃圾桶放回原来的位置。
就像把小朋友送回座位一样,动作可轻柔了呢。
然后摆臂就会缩回来,准备下一次的“抓桶”工作。
摆臂式垃圾车还有一个很贴心的地方呢。
它的操作很简单,司机师傅坐在驾驶座上,就像操控一个大玩具一样轻松。
司机师傅只要按几个按钮,或者拉几下操纵杆,摆臂就能听话地完成各种动作。
这就像是我们玩遥控汽车一样,只不过这个遥控的是垃圾车的摆臂啦。
而且呀,摆臂式垃圾车还很适合在各种不同的环境里工作。
不管是小区里那些狭窄的道路,还是街边比较拥挤的地方,它都能灵活地穿梭。
垃圾车四点工作原理

垃圾车四点工作原理
垃圾车主要依靠以下四个工作原理来实现垃圾的收集、压实和运输:
1. 收集原理:垃圾车通过垃圾桶或垃圾箱收集垃圾。
工作人员将垃圾桶或垃圾箱倒入垃圾车的储存区。
这一过程可以手动完成,也可以通过自动装载器实现。
2. 压实原理:为了提高垃圾运输的效率,垃圾车通常会使用压实装置对垃圾进行压实。
压实装置使用液压系统或其它压力机构,将垃圾堆中的垃圾压缩成较小的体积,以便在运输过程中储存更多的垃圾。
3. 运输原理:垃圾车通常使用燃油引擎来提供动力,并通过操纵驾驶室中的控制面板来控制车辆的行驶。
在进行垃圾运输的过程中,垃圾车会将收集到的垃圾从储存区运送到垃圾处理中心或垃圾填埋场。
4. 卸载原理:到达垃圾处理中心或垃圾填埋场后,垃圾车会使用卸载机构将储存区中的垃圾倾倒出来。
这一过程可以手动完成,也可以通过自动倾倒装置实现。
卸载后,垃圾车可以重新开始收集垃圾的工作。
这些工作原理的结合使得垃圾车能够高效地收集、压实和运输垃圾,为城市清洁和垃圾处理做出贡献。
小型勾臂垃圾车说明书-word
- --使用前请仔细阅读本说明书车厢可卸式垃圾车使用说明书前言车厢可卸式垃圾车是我公司根据市场及客户的需求开发的一种环卫专用车辆,专门用于运转城市中的厢装的生活垃圾。
整车性能稳定可靠,垃圾厢钩装、钩卸操作安全省力,自卸垃圾轻便快捷,整车所配厢密封性好,能消除二次污染,完全符合城市环保要求。
该车型采用汽车二类底盘,配备符合欧Ⅲ排放标准的发动机,具有优良的动力性和燃油经济性,良好的操纵稳定性,承载能力强,节能环保,是环卫部门、厂矿及住宅小区等理想的环卫车辆。
我公司产品实行质量三包,负责培训操作及维护人员,并为用户提供优良的售前和售后服务,消除用户的后顾之忧。
本说明书主要介绍侧装垃圾车的结构、技术性能参数、使用法、维护保养常识。
可供汽车驾驶人员、车辆维修人员及有关管理人员应用和参考。
产品型号说明:xxx x x x x xx xx 企业名称代号车辆类别号主参数代号(总质量t)产品序号结构特征代号用途特征代号企业自定代码目录一、主要技术参数.............................................................................................................. (1)二、基本结构与工作原理.................................................................................................................11.基本结构.......................................................................................................... (1)2.工作原理.......................................................................................................... (2)三、垃圾车使用安全注意事项 (3)四、垃圾车的使用.............................................................................................................. (3)(一)新车的磨合.......................................................................................................... (3)(二)驾驶与操作步骤.............................................................................................................. 8(三)注意事项.......................................................................................................... (14)五、保养维护............................................................................................................. (14)(一)底盘保养.......................................................................................................... (15)(二)作业装置保养............................................................................................................ (15)六、常见故障与排除.............................................................................................................. (15)七、随车文件............................................................................................................. (16)八、随车工具............................................................................................................. (16)一主要技术参数作为垃圾车驾驶和操作维修人员,必须熟悉垃圾车的主要技术参数,了解各部分基本结构和各种装置的作用、性能和相互关系,使其保持良好的工作状态,充分发挥垃圾车的作用。
摆臂式垃圾车功能介绍及使用说明

摆臂式垃圾车功能介绍及使用说明一、功能介绍1.垃圾收集:摆臂式垃圾车主要用于收集垃圾。
通过机械臂将垃圾箱提起并倾倒到车辆后部的储存区域,实现一次性收集多个垃圾箱,大大提高了收集效率。
2.垃圾运输:垃圾车装满垃圾后,可以直接运输到垃圾处理中心或垃圾填埋场。
具有大容量的储存区域可容纳大量垃圾,减少车辆的频繁往返,节约了时间和燃料成本。
3.自动倾倒:摆臂式垃圾车具有自动倾倒功能,即在达到指定地点后,车辆底部的储存区域会自动翻转倾倒,将垃圾倾倒到处理区域。
这项功能提高了操作的安全性和效率,减少了人工操作所带来的安全风险。
4.可调节机械臂:摆臂式垃圾车的机械臂长度和高度可以进行调节,以适应不同高度的垃圾箱。
这项功能确保了机械臂的稳定性和适应性,从而提高了工作的灵活性和可靠性。
5.远程控制:摆臂式垃圾车配备有远程控制系统,操作人员可以通过遥控器控制车辆移动、机械臂伸缩等操作,无需亲自上车进行操作。
这种远程控制功能提高了操作的便捷性和安全性。
二、使用说明1.操作人员培训:在使用摆臂式垃圾车之前,操作人员应接受相应的培训,了解车辆的结构和操作流程,以确保操作的安全性和准确性。
2.检查车辆:每次使用前,应对车辆进行检查,包括机械臂、液压系统、倾倒机构等部件的工作状态,确保没有异常情况发生。
3.垃圾箱装载:操作人员将垃圾箱放置在车辆侧面,调整机械臂的长度和高度,确保机械臂准确地抓住垃圾箱,并将其提升到车辆上。
在装载过程中,要保持平稳,避免垃圾箱摇晃。
4.垃圾倾倒:当车辆储存区域装满垃圾时,操作人员将车辆驶往垃圾处理中心或垃圾填埋场。
在此之前,应确认目的地的倾倒设备是否准备就绪,并确保周围的环境安全。
5.按下自动倾倒按钮后,车辆底部的储存区域会自动翻转倾倒,将垃圾倾倒到处理区域。
在倾倒过程中,操作人员应保持一定的距离,确保安全。
6.远程控制:在操作过程中,操作人员可以通过远程控制器进行车辆的移动和机械臂的伸缩。
操作人员应熟悉遥控器的使用方法,并将其用于确保操作的灵活性和安全性。
车厢可卸式垃圾车钩臂垃圾车的工作原理
车厢可卸式垃圾车钩臂垃圾车的工作原理首先,工作人员使用控制系统将车辆停在垃圾堆附近。
然后,钩臂从车辆的后部伸出,并且承载着一个垃圾桶或垃圾箱。
接下来,工作人员使用控制系统操作钩臂,将其放置到垃圾桶或垃圾箱上,然后利用液压系统控制钩臂上下运动,将垃圾桶或垃圾箱吊起。
一旦垃圾桶或垃圾箱被吊起,工作人员将它倾倒到车厢中。
车厢通常具有垃圾压缩装置,可以将垃圾压缩成更小的体积,以提高有效装载量。
当车厢装满垃圾后,可以使用液压系统将车厢卸下。
工作人员可以将车厢卸下放在地面上,然后再装上一个空车厢,以便继续收集垃圾。
需要注意的是,在整个过程中,安全是非常重要的。
工作人员必须严格遵守操作规程,确保自己和周围人员的安全。
1.高效:钩臂系统可以快速收集和卸载垃圾,提高工作效率。
2.灵活性:车厢可卸式垃圾车可以根据需要装卸车厢,适应不同的垃圾收集任务。
3.装载容量大:车厢装有垃圾压缩装置,可以将垃圾压缩成更小的体积,提高有效装载量。
4.节约成本:车厢可卸式垃圾车可以循环使用车厢,避免了购买新车辆的开销。
总之,车厢可卸式垃圾车通过钩臂系统收集和卸载垃圾,具有高效、灵活和节约成本等优点。
它是现代城市垃圾管理的重要设备,有助于改善环境卫生,提高垃圾处理效率。
拉臂式垃圾车的工作原理
(车厢可卸式)拉臂式垃圾车的工作原理拉臂式垃圾车,又称为:车厢可卸式垃圾车,勾臂式垃圾车,主要由汽车底盘、拉臂主油缸、附车架、翻转架、支撑腿(选装)、锁紧架、锁紧油缸及多路换向阀等组成。
拉臂式垃圾车是在二类汽车底盘上装有使车箱具有装载和卸载功能的拉臂架装置的专用汽车。
它可实现车箱与汽车的结合和分离,同时对车箱的散装货物实现自卸作业。
目前该车型已在车外得到广泛使用,在国内也常作为环卫行业的垃圾收集运输车。
5吨拉臂式垃圾车是常用车型之一,相比8吨以上的大吨位拉臂车,其拉臂架装置结构较简单,便于国内厂家生产,而大吨位拉臂车常采用进口拉臂架装置。
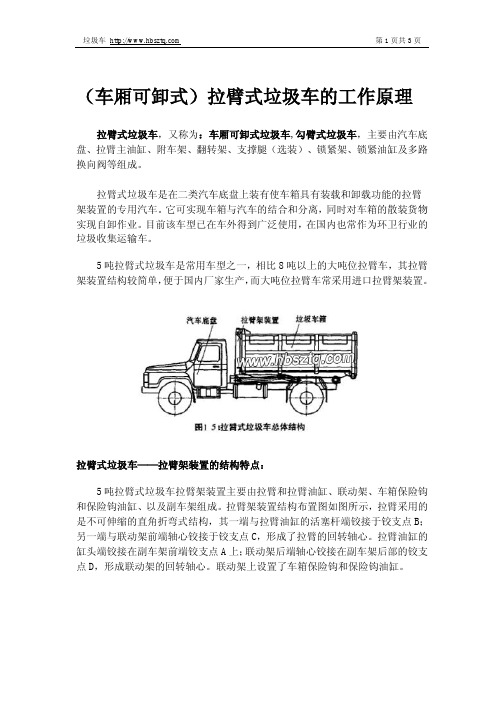
拉臂式垃圾车——拉臂架装置的结构特点:5吨拉臂式垃圾车拉臂架装置主要由拉臂和拉臂油缸、联动架、车箱保险钩和保险钩油缸、以及副车架组成。
拉臂架装置结构布置图如图所示,拉臂采用的是不可伸缩的直角折弯式结构,其一端与拉臂油缸的活塞杆端铰接于铰支点B;另一端与联动架前端轴心铰接于铰支点C,形成了拉臂的回转轴心。
拉臂油缸的缸头端铰接在副车架前端铰支点A上;联动架后端轴心铰接在副车架后部的铰支点D,形成联动架的回转轴心。
联动架上设置了车箱保险钩和保险钩油缸。
拉臂式垃圾车——拉臂架装置的工作原理:拉臂式垃圾车通过拉臂架装置完成两种不同的功能动作:换箱和倾卸。
当拉臂架装置进行换箱动作时,首先保险钩油缸动作,开启保险钩,车箱解除了保险。
拉臂油缸活塞杆伸长举起拉臂,使拉臂绕铰点C顺时针回转,拉臂钩就往后移动。
如果副车架上装有车箱,则车箱被推置到地上。
当地上车箱要提上车架时,使拉钩先钩住车箱吊环,然后收缩活塞杆,使拉臂以铰支点C为轴心逆时针回转,将车箱提上放平后,保险钩油缸动作,拉起车箱保险钩,使车箱固定在副车架上。
当拉臂架装置进行倾卸动作时,与换箱动作不同,车箱保险钩在整个倾卸过程中要处在保证拉臂与车箱不分离,即拉臂、联动架及车箱通过车箱保险钩相互联结为一体。
拉臂式垃圾车的优点:由于拉臂式垃圾车一车可配备多个垃圾箱,可分散放置在各个垃圾收集点进行垃圾收集工作。
中英文文献翻译—拉臂式垃圾车设计

附录AThe Design of Pull Arm Garbage Truck1The introduction of Pull Arm Garbage TruckPull arm garbage truck is equipped with two types of chassis that has a trunk load and unloading functions to pull arm device-specific vehicles. It can be achieved with car trunk the combination and separation, while the bulk of the trunk to achieve self-unloading cargo operations. The model has been widely used in foreign countries, often in the domestic industry as a sanitation refuse collection vehicles. 5 t pull arm garbage truck is one of the commonly used models, compared to 8 t Arm pull over large tonnage trucks, the pull-arm device structure is relatively simple and easy to domestic Manufacturers; And large tonnage often imported pull arm device. Domestic Manufacturers producing 5 t pull the car pulling the boom arm structure of the device, although about the same, but the important structural parameters of the selection and design of different structural arrangement, it will directly affect the car performance]20[.2 Pull the boom structure and principle of the device2.1 The structural characteristics of pull-arm device5 t pull arm garbage truck pulling device consists of pulling the boom arm and pull arm cylinder, the United Moving frame, trunk insurance hook and cylinder, and the frame. La Boom device structural arrangement shown in figure 2, pull telescopic arm is not used right-angle bend structure. the end of the cylinder and pull the piston rod side arm hinged on the hinge pivot B; Another linkage frame front end and hinged at the hinge pivot C, the formation of a rotary arm pull heart. Cylinder head cylinder arm pull side hinged front frame on the hinge pivot A; linkage frame hinged rear axle frame rear hinge pivot D, the formation of linkage rotary frame heart. Insurance linkage trunk rack hook set the hook cylinder and insurance cylinder.2.2 The working principle of the device arm pullPulling garbage truck arm by pulling the device to complete the function of two different dynamic, for boxes and dumping. When the pull device for boom box action, the first cylinder insurance hook action open the trunk insurance hook, trunk lift insurance. Pull lift arm cylinder piston rod elongation from the pull arm, pull arm to pivot around the hinge C clockwise rotation, the hook arm to pull back move. If the frame is equipped with a trunk, the trunk was pushed home ground. When put on the frame, so that the first hook retractor trunk rings, and contraction of the piston rod, pull arm to hinge pivot counter-clockwise rotation axis C, will put on the flat trunk, the insurance cylinder hook action, pull carriagesinsurance hook fixed to the frame to the trunk.When the pull-arm device dumping action, and action for different box, trunk insurance hook dump in the whole process to ensure that tension in the arm and trunk are not isolated, that is pull arm、the linkage through the trunk rack and trunk link between the insurance as one of the hook, by the deputy rear frame hinge pivot clockwise rotation axis D, lifting carriages lifted until the refuse rubbish. Trunk reset, as long as the retraction of cylinder piston rod pull arm, the pulling arm body still hinge pivot point D is the shaft counterclockwise rotation, until the trunk reset.3 La Boom Selection and design of device structure parameters3.1 Device to pull the boom pivot hinge arrangement and geometry of the main structureDetermined by the following three areas:a. Arm by pulling a dump truck performance, it is 5 t pull the best selection of cars from the arm unloading chassis, the chassis can be selected according to the length of pull arm device to determine frame the total length. To ensure the car to pull arm for changing trunk and dumping action by the force of the chassis reasonable and complete the dumping arm pull action pivot hinge rotation axis D of the location should be arranged in behind the rear spring plate from the chassis rear bearing axis, the spacing is about 0 ~ 100 mm.b. According to the first hinge pivot D arm pull for me the beginning of the selected pivot hinge rotation axis C. In the design and production of the actual process of pulling the car arm in arm had appeared during the pull action although the initial state, pull arm lift carriages, failed to pull arm pivot around the hinge C rotation, but with the linkage frame with the rotation around the hinge pivot point D, which can not get trunk open the beginning of fall; when lifting a certain height, the action of gravity in the trunk, the hinge will pivot C a sudden fall, so pull arm, the linkage frame and carriages suddenly drop, resulting in relatively large; in hit, resulting in extremely unsafe for me a smooth action. To resolve this problem, determine the hinge point C of the axis position is especially important. First the one hand, the horizontal axis of pivot C can not above the level layout of pivot D. In addition, by the hinge can pivot C stress analysis know, the hinge pivot axis of C must be below the level of tension hinge pivot arm cylinder head horizontal axis, while the hook arm pull-start action must be arranged in the vertical axis of the hinge pivot between C and the hinge pivot left foot.c. Important geometrical parameters arm pull a pull arm foot radius of gyration for pull the oil boom turning radius of the cylinder piston rod end of radius of gyration of the angle between the two radius. From the above points analysis we know that, The smaller of radius. The greater the force needed to pull the smaller cylinder arm. Meet the requirements underthe premise of arms-for-me pull-foot turning radius, the smaller the better, La boom cylinder rod side radius of gyration R. The bigger the better as far as possible, so that can pull compact boom, operating small space]21[.3.2 The selection of pull arm cylinder and cylinder installation angle y. The range ofDetermined by the following two aspects:a. By mapping method or analytical method to determine the location of the above the hinge pivot and Pull arm geometry and other components, may initially determine the pull-stroke arm cylinder and installation distance.b. Pull arm cylinder mounting angle of La Boom is the important structural parameters of devices. By the former knowledge, pull the boom box or device for carrying out the process of dumping action, pull the oil boom cylinders have to be overcome trunk (full load) resistance torque generated by gravity, and the lifting crane action start unloading boxes when the moment of resistance is the greatest moment of resistance to overcome, and in Boom began pulling action of the hinge pivot device static friction and inertia moment of resistance Maximum torque. So pull arm cylinder mounting angle y. From the previous analysis we know, when angle larger, the pull arm cylinder smaller maximum thrust required, select the pull arm cylinder bore can be smaller.By pulling in the boom cylinder is installed between the frame and trunk floor, oil cylinder installation layout space is limited, so the pull arm cylinder mounting angle range is also very limited. Design principles to children as much as possible to install a large angle, choose the right drawing arm oil pulling arm cylinder bore to meet performance requirements for the use of vehicles, without increasing the cost and fuel tank weight, and easy layout. Analysis and comparison of some domestic manufacturers to produce 5 t pull arm ,the actual design and production of cars and trucks pulling arm experience, 5 t pull arm around the installation space vehicles between 250 ~ 300 mm, the general tension arm cylinder mounting angle should be Taken between 3°~5°.附录B拉臂式垃圾车设计1拉臂车概述拉臂式垃圾车是在二类汽车底盘上装有使车箱具有装载和卸载功能的拉臂架装置的专用汽车。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、拉臂式垃圾车介绍
拉臂式垃圾车,又称:箱体可卸式垃圾车、车厢可卸式垃圾车和勾臂式垃圾车,它是一种采用可伸缩的钩臂实现垃圾箱的二次吊装,可将垃圾箱自行吊上放下,并可自动倾倒垃圾的专用环卫垃圾运输车辆。
拉臂式垃圾车拥有结构简单,操作稳定方便,装卸效率高,机械化程度高,节省人力等优点。
2、拉臂式垃圾车的品种
拉臂式垃圾车品种有:东风拉臂式垃圾车、一汽解放拉臂式垃圾车、长安拉臂式垃圾车、福田时代小卡拉臂式垃圾车、五十铃拉臂式垃圾车等等。
湖北厦工楚胜专用汽车制造有限公司生产的拉臂式垃圾车,采用高新设计可摆动的钩臂,垃圾箱由框架、开启油缸、滑轮、后门和若干加强框架与钢板焊接而成。
拉臂式垃圾车调换货厢快捷方便,货厢上带盖(倒垃圾时可翻开),可防止在垃圾收集过程中,或是在垃圾装卸的运输过程中产生二次污染。
一车可配备多个拉臂箱进行循环作业,大大提高了垃圾车的使用效率。
拉臂车垃圾厢体可选用碳钢、不锈钢材质、内部采取环氧树脂防腐处理,改装部分与原车底盘为可分离式,维修方便且保持了原车的机动性及行驶性能。
我厂长期为用户提供各种垃圾车配件、垃圾车配套垃圾箱(桶),欢迎有采购需要的客户来电咨询洽谈!
3、拉臂式垃圾车工作原理及结构组成
拉臂式垃圾车是在底盘上设附车架,在附车架上安放垃圾箱,并安装吊装装置。
拉臂式垃圾车拉臂主液压缸是吊装、卸载垃圾的主要传动装置,控制其伸缩可完成吊装垃圾箱、卸倒垃圾以及卸下空垃圾箱的工作。
拉臂式垃圾车的拉臂主液压缸一端连接在附车架的尾端靠驾驶室一端,另一端则连接在拉臂上。
拉臂式垃圾车的拉臂机构主要由多种换向阀、平衡阀、箱体锁定装置、平衡稳定装置、拉臂钩等组成。
多路换向阀:保证了投入作业的液压部件、可靠换向、确保作业油缸停留在任意位置。
平衡稳定装置:独特结构的后平衡装置能保证在钩箱与卸箱的过程中,起辅助支撑作用。
加大整车的重心范围,工作中更加安全可靠。
使整车具有了可靠的使用稳定性。
拉臂钩的材质:全部采用欧洲最新设计,品种多,结构规格全。
有三大结构形式,拉臂式,伸缩式,摆臂伸缩式。
吨位从一吨到二十吨。
用户可以根据不同的底盘,不同的场所需求,安装结构不同的拉臂钩。
平衡阀:能够确保两主臂油缸同步运动、压力恒定、油缸动作平衡。
高压管路接头,承压高、密封性能好、为高压管路连接系统的首选产品液压系统具有安全的互锁功能,福田时代小型拉臂车在操作过程中确保液压系统安全可靠。
箱体锁定装置:液压系统控制的锁箱结构,能紧紧的把垃圾箱的底部的导轨粱锁紧。
车辆在运输的过程中,垃圾箱与车辆底盘融为一体,安全性能可靠。
欢迎前来订购,官网:
。