bts7960全桥驱动参数
TBS7960四路直流电机驱动板数据手册(创智科技)

BTS7960四路直流电机 驱动板
技 术 手 册
v1.0
创智科技
BTS7960四路直流电机驱动板
电气性能
型号:TBS7960 输入电压:5.5V-27.5V 最大瞬间电流: 43A 控制方式:PWM 或电平 占空比:0-100%
创智科技
板子特点:
1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 双 BTS7960最大电流( 43A)H 驱动; 支持四路直流电机驱动; 跳帽使能控制,减少杜邦线的使用; 电源支持27.5V 电压; 单片机与驱动芯片使用芯片隔离; 采用进口芯片,保证原装、正规; 采用2P 插口减少接线麻烦; 单路电机仅需2根线控制; 72HC244采用直插形式,方便更换; 直插方式安装驱动芯片,半桥损坏后直接更换; 72HC244采用直插形式,方便更换; 驱动芯片配置散热片,更好的达到散热效果; 驱动芯片插在主板上,自然形成上下风道; 电机接口添加安规电容防止逆流损毁驱动;
4.
I 口使用杜邦线直接连接单片机即可
逻辑图
EN 高电平
Ix1 H L H/L 悬空 H L
Ix2 L H 悬空 H/L H L H/L H/L
电机状态 正转 反转 禁止 禁止 短路 停止 停止 禁止
低电平 悬空
H/L H/L
创智技
创智科技
BTS7960四路直流电机 驱动板
技 术
创智科技
红字部分是创智科技独创技术! ! !
电机与电源接口
创智科技
电机驱动基本使用方法
1. 2.
最左侧5V、GND 为74HC244供电口 EN1是电机1号使能、EN2是电机2号使能、 EN3是电机3号使能、EN4是电机4号使能
BTS7960_v1.1_2004-12-07电机驱动中文版

4.2Power 阶段 该 BTS7960 的功率级包括一个 P 沟道垂直 DMOS 晶体管的 高侧开关和一个 N 沟道垂直 DMOS 晶体管的低侧开关。所有 保护和诊断功能都位于一个单独的顶级芯片。这两款交换机可以 操作高达 25 千赫,允许活跃随心所欲,从而降低功耗 耗散在集成二极管的正向操作。 开态电阻 RON 是依赖于电源电压 VS 以及对 结温 Tj 。在通电阻特性的典型显示在 图 4。 Figure4Typical 通电阻与电源电压 5 10 15 20 25 481216202428 VS RON(HS) MΩ V TJ =150°C TJ =25°C TJ =-40°C 高端开关
1 概述 该 BTS7960 是 NovalithIC 系列包含三种不同的芯片的一部分 包装:一个 P 沟道海赛德 MOSF1Overview 该 BTS7960 是 NovalithIC 系列包含三种不同的芯片的一部分 包装:一个 P 沟道海赛德 MOSFET 和一个 N 沟道 MOSFET 的低边 用驱动器 IC 一起,形成一个完全集成的高电流半桥。所有这三个 芯片被安装在一个共用的引线框架,使用该芯片上的芯片和芯片通过芯片 技术。电源开关采用垂直 MOS 技术,以确保最佳的上 态电阻。由于 P 沟道高侧开关需要一个电荷泵 从而最大限度地降低 EMI 消除。连接到微控制器是由简单的
4.4Control 和诊断。 。 。 。 。 。 。 。 。 。 。 。 0.17
4.4.1Input。 。 。 ຫໍສະໝຸດ 。 。 。 。 。 。 。 17
4.4.2Dead 时间生成。 。 。 。 。 。 。 。 。 。 。 。 17
4.4.3Adjustable 压摆率。 。 。 。 。 。 。 。 。 。 17
几种电机驱动的比较
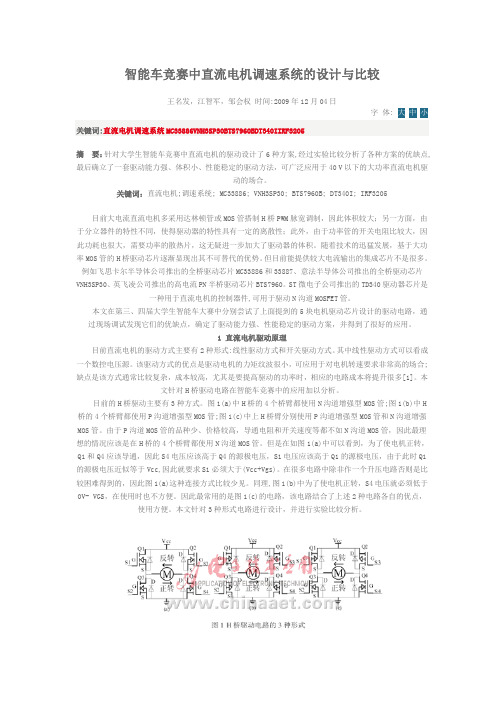
智能车竞赛中直流电机调速系统的设计与比较王名发,江智军,邹会权 时间:2009年12月04日字 体:关键词:直流电机调速系统MC33886VNH3SP30BTS7960BDT340IIRF3205摘 要:针对大学生智能车竞赛中直流电机的驱动设计了6种方案,经过实验比较分析了各种方案的优缺点,最后确立了一套驱动能力强、体积小、性能稳定的驱动方法,可广泛应用于40 V以下的大功率直流电机驱动的场合。
关键词:直流电机;调速系统; MC33886; VNH3SP30; BTS7960B; DT340I; IRF3205目前大电流直流电机多采用达林顿管或MOS管搭制H桥PWM脉宽调制,因此体积较大;另一方面,由于分立器件的特性不同,使得驱动器的特性具有一定的离散性;此外,由于功率管的开关电阻比较大,因此功耗也很大,需要功率的散热片,这无疑进一步加大了驱动器的体积。
随着技术的迅猛发展,基于大功率MOS管的H桥驱动芯片逐渐显现出其不可替代的优势。
但目前能提供较大电流输出的集成芯片不是很多。
例如飞思卡尔半导体公司推出的全桥驱动芯片MC33886和33887、意法半导体公司推出的全桥驱动芯片VNH3SP30、英飞凌公司推出的高电流PN半桥驱动芯片BTS7960。
ST微电子公司推出的TD340驱动器芯片是一种用于直流电机的控制器件,可用于驱动N沟道MOSFET管。
本文在第三、四届大学生智能车大赛中分别尝试了上面提到的5块电机驱动芯片设计的驱动电路,通过现场调试发现它们的优缺点,确定了驱动能力强、性能稳定的驱动方案,并得到了很好的应用。
1 直流电机驱动原理目前直流电机的驱动方式主要有2种形式:线性驱动方式和开关驱动方式。
其中线性驱动方式可以看成一个数控电压源。
该驱动方式的优点是驱动电机的力矩纹波很小,可应用于对电机转速要求非常高的场合;缺点是该方式通常比较复杂,成本较高,尤其是要提高驱动的功率时,相应的电路成本将提升很多[1]。
BTS7960中文数据手册

BTS7960智能功率芯片中文资料The BTS7960 is part of the NovalithIC family containing three separate chips in one package: One p-channel highside MOSFET and one n-channel lowside MOSFET together with a driver IC, forming a fully integrated high current half-bridge. All three chips are mounted on one common leadframe, using the chip on chip and chip by chip technology. The power switches utilize vertical MOS technologies to ensure optimum on state resistance. Due to the p-channel highside switch the need for a charge pump is eliminated thus minimizing EMI. Interfacing to a microcontroller is made easy by the integrated driver IC which features logic level inputs, diagnosis with current sense, slew rate adjustment, dead time generation and protection against overtemperature, overvoltage, undervoltage, overcurrent and short circuit. The BTS7960 can be combined with other BTS7960 to form H-bridge and 3-phase drive configurations.BTS7960是NovalithIC家族三个独立的芯片的一部分:一是p型通道的高电位场效应晶体管,二是一个n型通道的低电位场效应晶体管,结合一个驱动晶片,形成一个完全整合的高电流半桥。
IR2104芯片驱动电路实现智能车差速控制方案

IR2104芯片驱动电路实现智能车差速控制方案由于本人主要是搞软件的,所以硬件方面不是很了解,但是为了更好地相互学习,仅此整理出一份总结出来,有什么错误的地方还请大家积极的指出!供大家一起参考研究!我们做的智能小车,要想出色的完成一场比赛,需要出色的控制策略!就整个智能车这个系统而言,我们的被控对象无外乎舵机和电机两个!通过对舵机的控制能够让我们的小车实时的纠正小车在赛道上的位置,完成转向!当然那些和我一样做平衡组的同学不必考虑舵机的问题!而电机是小车完成比赛的动力保障,同时平衡组的同学也需要通过对两路电机的差速控制,来控制小车的方向!所以选一个好的电机驱动电路非常必要!常用的电机驱动有两种方式:一、采用集成电机驱动芯片;二、采用MOSFET和专用栅极驱动芯片自己搭。
集成主要是飞思卡尔自己生产的33886芯片,还有就是L298芯片,其中298是个很好的芯片,其内部可以看成两个H桥,可以同时驱动两路电机,而且它也是我们驱动步进电机的一个良选!由于他们的驱动电流较小(33886最大5A持续工作,298最大2A持续工作),对于我们智能车来说不足以满足,但是电子设计大赛的时候可能会用到!所以想要详细了解他们的同学可以去查找他们的数据手册!在此只是提供他们的电路图,不作详细介绍!33886运用电路图下面着重介绍我们智能车可能使用的驱动电路。
普遍使用的是英飞凌公司的半桥驱动芯片BTS7960搭成全桥驱动。
其驱动电流约43A,而其升级产品BTS7970驱动电流能够达到70几安培!而且也有其可替代产品BTN7970,它的驱动电流最大也能达七十几安!其内部结构基本相同如下:每片芯片的内部有两个MOS管,当IN输入高电平时上边的MOS管导通,常称为高边MOS管,当IN输入低电平时,下边的MOS管导通,常称为低边MOS管;当INH为高电。
基于BTS7960_DSP的大功率控制系统
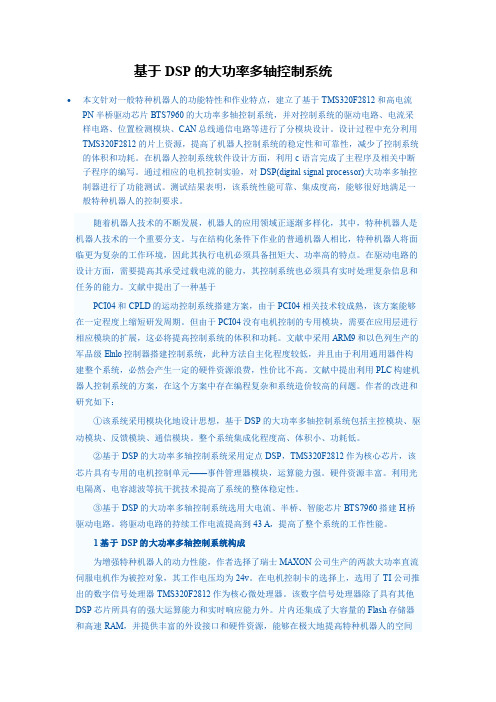
基于DSP的大功率多轴控制系统本文针对一般特种机器人的功能特性和作业特点,建立了基于TMS320F2812和高电流PN半桥驱动芯片BTS7960的大功率多轴控制系统,并对控制系统的驱动电路、电流采样电路、位置检测模块、CAN总线通信电路等进行了分模块设计。
设计过程中充分利用TMS320F2812的片上资源,提高了机器人控制系统的稳定性和可靠性,减少了控制系统的体积和功耗。
在机器人控制系统软件设计方面,利用c语言完成了主程序及相关中断子程序的编写。
通过相应的电机控制实验,对DSP(digital signal processor)大功率多轴控制器进行了功能测试。
测试结果表明,该系统性能可靠、集成度高,能够很好地满足一般特种机器人的控制要求。
随着机器人技术的不断发展,机器人的应用领域正逐渐多样化,其中,特种机器人是机器人技术的一个重要分支。
与在结构化条件下作业的普通机器人相比,特种机器人将面临更为复杂的工作环境,因此其执行电机必须具备扭矩大、功率高的特点。
在驱动电路的设计方面,需要提高其承受过载电流的能力,其控制系统也必须具有实时处理复杂信息和任务的能力。
文献中提出了一种基于PCI04和CPLD的运动控制系统搭建方案,由于PCI04相关技术较成熟,该方案能够在一定程度上缩短研发周期。
但由于PCI04没有电机控制的专用模块,需要在应用层进行相应模块的扩展,这必将提高控制系统的体积和功耗。
文献中采用ARM9和以色列生产的军品级Elnlo控制器搭建控制系统,此种方法自主化程度较低,并且由于利用通用器件构建整个系统,必然会产生一定的硬件资源浪费,性价比不高。
文献中提出利用PLC构建机器人控制系统的方案,在这个方案中存在编程复杂和系统造价较高的问题。
作者的改进和研究如下:①该系统采用模块化地设计思想,基于DSP的大功率多轴控制系统包括主控模块、驱动模块、反馈模块、通信模块。
整个系统集成化程度高、体积小、功耗低。
(完整word版)飞思卡尔智能车技术报告
集成化的设计思路的好处是原件密度高,系统可以小型化一体化,通过综合考虑各方面因素,在确定了系统最终硬件方案不做大的更改的情况下,在确保了系统可靠性的前提下,最终选择了一体化,集成化的硬件设计思路。使车体硬件电路布局紧凑,稳定可靠。
3、大前瞻,高分辨率方案。
在光电传感器的安装不影响赛车行驶的前提下,尽可能的提高传感器前瞻,更大的前瞻,能为赛车提供更多的信息,更能让赛车提前作出决策。
3.5.2主销内倾角
主销内倾角是指主销在汽车的横向平面内向倾斜一个角度,即主销轴线与地面垂直线在汽车横向断面内的夹角。主销内倾角也有使车轮自动回正的作用。通常汽车主销内倾角不大于80。
2.5.3前轮外倾角
通过车轮中心的汽车横向平面与车轮平面的交线与地面垂线之间的夹角称为“前轮外倾角”。轮胎呈现“八”字形张开时称为“负外倾”,而呈现“V”字形张开时称为“正外倾”。一般前轮外倾角为10左右。
4.5速度检测模块
为了使车在跑的过程中能快速加速,及时减速除了要有好的算法来控制,还依赖于速度闭环返回的速度脉冲值的可靠度和精确度,因此为了提高检测精度,最后选用了精度较高的光电编码器,光电编码器使用5V-24V电源,输出12.5%-85%VCC的方波信号。
9.2存在的不足
9.3可改进的方法
第十章参考文献
第一章引言
1.1方案介绍
系统硬件设计可以说是整个智能车设计的基础和重中之重。正确的硬件设计方向与思路,是系统稳定可靠的基础,功能强大的硬件系统,更为软件系统的发挥提供了强大的平台。、
1、整车低重心设计。
通过以往几届比赛的经验我们看到,往往重心低,体积小巧,布局紧凑的赛车更能取得好的成绩。、于是,我们通过合理布局电路板和各种传感器,尽可能地降低整车重心。在不影响传感器前瞻,或者不过度牺牲传感器性能的情况下,尽量降低光电传感器的高度,以提高赛车的侧翻极限。
bts7960b原理
bts7960b原理
BTS7960B是一款电机驱动芯片,它的主要工作原理如下:
- 电源供电:BTS7960B需要外部提供适当的电源电压,通常为12V至40V。
- 输入信号控制:BTS7960B接受来自微控制器或其他数字设备的输入信号来控制电机的运行。
它通过两个输入引脚(IN1和IN2)控制一个电机,并通过另外两个输入引脚(IN3和IN4)控制另一个电机。
- PWM调制:为了控制电机的速度,BTS7960B使用脉冲宽度调制(PWM)技术。
通过调整输入信号的PWM占空比,可以控制电机的转速。
- 电流检测:BTS7960B内置了电流检测功能,可以监测电机的输出电流。
这有助于保护电机和驱动器免受过载或短路等故障的影响。
- 保护功能:BTS7960B还具有多种保护功能,包括过热保护、欠压保护和过流保护等。
当检测到异常情况时,它会自动停止输出信号,以防止损坏电机或驱动器。
基于半导体制冷片的温度控制系统的设计
基于半导体制冷片的温度控制系统的设计摘要:设计一种用于红外传感器工作温度调节控制的模块,使红外传感器在低温下工作,以提高红外传感器的探测性能。
通过以mega16芯片为核心,以半导体制冷片为制冷元件,以PID算法为基础构建了一套半导体温度调节系统[1]。
实验结果表明,半导体制冷温度控制系统能够为红外探测器提供所需的工作温度。
关键词:温度半导体制冷片PID算法温度对红外传感器有比较大的影响,当外界环境温度发生变化时,红外传感器对所测量的物理量会有较大的变动,影响其测量值的准确性[2],产生较大的外界噪声干扰,所以当进行精确测量时,将红外传感器控制在一个恒定的温度下,可以大大提高探测精度,减少误差。
1 半导体制冷器的工作原理半导体制冷也称热电制冷,是一门介于制冷技术和半导体技术边缘的学科,半导体制冷是以温差电现象为基础制冷方法,利用帕尔贴效应的原理达到制冷目的。
帕尔帖效应:当电流I通过由两种不同材料组合成的闭合回路时,在材料的接头处一端会吸收热量Qp,另一端会放出热量Qp。
这种吸收或放出的热量叫做帕尔帖热,其吸热或放热由电流的方向决定,大小由公式决定。
π为帕尔帖系数,与温差电动势率有关,为组成回路两种材料的温差电动势率,T为相关接头的温度。
作为一种制冷源,半导体冷片可连续工作,不需要制冷剂,没有污染源和机械运动部件,不会产生回转效应,是一种固体元件,工作时没有噪音、震动、寿命长,安装容易。
半导体制冷片是电流换能型器件,通过控制输入电流,可实现高精度的温度控制。
热惯性小,制冷制热时间比较快,在热端散热良好冷端空载的情况下,可迅速达到最大温差。
2 温度控制系统的组成半导体温度控制系统结构框图如图1,由制冷片引起的温度变化经温度传感器传送给控制器,与设定的温度进行比较,所得的信号偏差通过PID进行调整处理,由控制器发出命令信号,通过驱动电路驱动半导体制冷片进行制热或者制冷,以达到红外传感器的工作温度环境。
3 硬件系统设计本控制系统主控单元采用的是ATMEL公司A VR系列的Atmega16单片机。
BTS7960连接线路图
BTS7960接口连线图图中的引脚7960INH1、与7960INH2接在一起7960IN1、7960IN2分别连接到XS1 28的I/0口。
BTS7960是应用于电机驱动的大电流半桥高集成芯片,它带有一个P沟道的高边MOSFET、一个N沟道的低边MOSFET和一个驱动IC。
P沟道高边开关省去了电荷泵的需求, 因而减小了EMI。
集成的驱动IC具有逻辑电平输入、电流诊断、斜率调节、死区时间产生和过温、过压、欠压、过流及短路保护的功能。
BTS7960通态电阻典型值为16mΩ,驱动电流可达43A。
因此即使在北方寒冷的冬天,仍能保证车窗的安全启动。
由于7960是单桥驱动芯片,要想让点击能够正反转,就必须使用两片7960构成全桥,上图就是两片构成的全桥驱动,IN1、IN2分别为方向控制端口,INH1、INH2为使能端,接在一起接上单片机PMW输出口,例如:IN1接高电平,IN2接低电平电机正传,反之则电机反转。
PWM脉冲也可由IN1、IN2输入,此时INH1、INH2就是方向控制端口。
接在5引脚的电容的作用是使7960的通断速度更快,接在各引脚的电阻主要作用是限流电阻,也可不加,但加上对跟安全,在电源端口的电容耐压必须注意,由于电机存在反向电动势,电容的耐压应是电源电压的两倍,更高则不需要,不仅增加成本还会占用更大体积,否则会导致电容发生击穿甚至爆炸,本人亲身经历,造成后果相当严重,望各位注意。
与7960差不多的驱动芯片7970,相比较7970驱动电流更大,其他参数大致相同。
在做飞思卡尔比赛中使用此芯片较多,在汽车车窗驱动也用的较多。
在做板布线时引脚4与引脚8都是输出端口,引脚8是芯片背面金属部分,输出电流很大如果只用引脚4的输出将会使布线烧毁,因此应将引脚4与引脚8接在一起并使用引脚8输出接至电机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BTS7960的芯片内部为一个半桥。
INH引脚为高电平,使能BTS7960。
IN引脚用于确定哪个MOSFET导通。
I N=1且INH=1时,高边MOSFET导通,OUT引脚输出高电平;IN=0且INH=1时,低边MOSFET导通,O UT引脚输出低电平。
SR引脚外接电阻的大小,可以调节MOS管导通和关断的时间,具有防电磁干扰的功能。
I
S引脚是电流检测输出引脚。
BTS7960的引脚IS具有电流检测功能。
正常模式下,从IS引脚流出的电流与流经高边MOS管的电流成正比,若RIS=1kΩ,则V IS=I load/8.5;在故障条件下,从IS引脚流出的电流等于I IS(lim)(约4.5mA),最后的效果是IS为高电平。
如图4所示,图(a)为正常模式下IS引脚电流输出,图(b)为故障条件下IS引脚上的电流输出。
BTS7960短路故障实验的实验条件如下:+12.45V电池电压,+5V电源供电,2.0m短路导线(R=0.2Ω),横截面积为0.75 mm,连接1kΩ电阻和一个发光二极管。
V S与电池正极间导线长1.5m(R=0.15Ω)。
如图
5所示,其中V IS是IS引脚对地的电压、V L是OUT引脚对地电压,I L为发生对地短路故障时,流过BTS796
0的短路电流。