SYSTEM150自动导航驾驶系统
sulas 航空术语
sulas 航空术语SULAS航空术语引言:航空术语是航空领域中使用的特定词汇和短语,用于描述和交流飞行操作、飞机性能、航空安全和航空导航等相关概念。
SULAS航空术语是指在SULAS(Simulated Unmanned Low Altitude System,模拟无人低空系统)仿真飞行系统中使用的术语。
本文将介绍一些常见的SULAS航空术语,以帮助读者更好地理解和应用。
1. 仿真系统(Simulation System)仿真系统是指用于模拟飞行操作和环境的计算机软件和硬件设备。
在SULAS系统中,仿真系统通过模拟飞行器的动力学行为、气象条件和导航环境等因素,提供一个真实的飞行体验。
通过仿真系统,飞行员可以进行训练和实践,提高飞行技能和应对紧急情况的能力。
2. 低空飞行(Low Altitude Flight)低空飞行是指飞行器在相对较低的高度范围内进行的飞行活动。
在SULAS系统中,低空飞行一般指飞行器在地面至500英尺(约150米)的高度范围内进行的飞行操作。
低空飞行通常用于无人机、直升机和一些特定类型的飞行器的训练和应用。
3. 飞行计划(Flight Plan)飞行计划是指飞行员在执行飞行任务前制定的详细计划。
在SULAS系统中,飞行计划包括飞行器的起飞和降落地点、航路、飞行高度、速度和燃油消耗等信息。
通过制定飞行计划,飞行员可以提前规划好飞行任务的各个环节,确保安全和高效地完成飞行任务。
4. 飞行器控制(Aircraft Control)飞行器控制是指飞行员对飞行器的操纵和控制操作。
在SULAS系统中,飞行员可以通过操纵飞行器的控制杆、脚踏板和其他操作装置,控制飞行器的姿态、速度和航向等参数。
飞行员需要熟练掌握飞行器控制技术,以确保飞行器在飞行过程中的稳定和安全。
5. 自动驾驶(Autopilot)自动驾驶是指飞行器通过预设的程序和算法,自主地进行飞行操作。
在SULAS系统中,自动驾驶系统可以接管飞行器的控制,并按照预设的飞行计划进行自动导航和操纵。
航空业英语(实用)
飞机专业术语英汉对照 1、the airframe 机身,结构2、The front (fore) part 前部3、The rear (aft) part 后部4、port 左旋(舵)5、starboard 右旋(舵)6、the inboard engine or inboards 内侧发动机7、the outboard engine or outboards 外侧发动机8、the nose 机头9、the belly 腹部 10、the skin 蒙皮11、the windscreen or windshield 风挡 12、the wing 机翼13、the trailing edge 机翼后缘 14、the leading edge 机翼前缘 15、the wing tip 翼尖16、the control surface 操纵面 17、ailerons 副翼18、flaps (inboard flap,outboard flap,leading edge flaps) 襟翼(内 侧襟翼,外侧襟翼,前缘缝翼)19、spoilers (inboardoutboard spoiler)(spoiler downup) 阻力板,扰流 板(内、外侧扰流板)(扰流板放下、打开) 20、slats 缝翼21、elevators (elevator control tab) 升降舵(升降舵操纵片) 22、rudder (rudder control tab) 方向舵(方向舵操纵片) 23、flap angle 襟翼角 24、flap setting 襟翼调整25、the full flap position 全襟翼位置 26、a flapless landing 无襟翼着陆 27、the landing gear 起落架 28、stabilizer 安定面 29、the nose wheel 前轮 30、gear locked 起落架锁定 31、the wheel well 起落架舱 32、the wheel door 起落架舱门 33、a tyre 轮胎 34、to burst 爆破35、a deflated tyre 放了气的轮胎 36、a flat tyre 走了气的轮胎 37、a puncture 轮胎被扎破38、to extend the flaps (to retract the flaps) 放下襟翼(收上襟翼) 39、gear extention (gear retraction) 起落架放下(起落架收上) 40、The gear is jammed. 起落架被卡死。
Navigation System 51 导航系统用户手册说明书
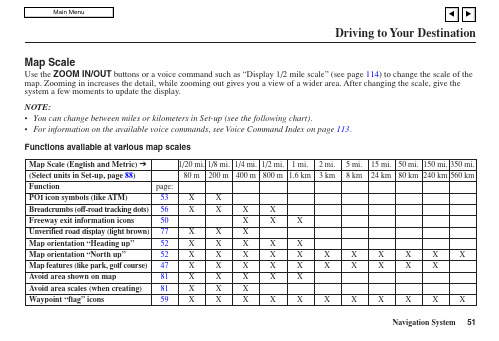
Navigation System 51Driving to Your DestinationMap ScaleUse the ZOOM IN/OUT buttons or a voice command such as “Display 1/2 mile scale” (see page 114) to change the scale of the map. Zooming in increases the detail, while zooming out gives you a view of a wider area. After changing the scale, give the system a few moments to update the display.NOTE:•You can change between miles or kilometers in Set-up (see the following chart).•For information on the available voice commands, see Voice Command Index on page 113.Functions available at various map scalesMap Scale (English and Metric) ➔(Select units in Set-up, page 88)FunctionPOI icon symbols (like ATM)Breadcrumbs (off-road tracking dots)Freeway exit information icons Unverified road display (light brown)Map orientation “Heading up”Map orientation “North up”Map features (like park, golf course)Avoid area shown on map Avoid area scales (when creating)Waypoint “flag” icons page:535650775252478181591/20 mi.80 m X X X X X X X X X 1/8 mi.200 m X X X X X X X X X 1/4 mi.400 m X X X X X X X X X 1/2 mi.800 m X X X X X X X 1 mi.1.6 km X X X X X X 2 mi.3 km X X X5 mi.8 kmX X X 15 mi.24 km X X X 50 mi.80 km X X X 150 mi.240 km X XX 350 mi.560 kmXXNavigation System52Driving to Your DestinationMap OrientationThe map can be oriented with north pointing up (North-up), or with a front window view (Heading-up). The red arrow in both heading symbols always point s north. The map can display "north up" in any scale. However, "heading up"can be viewed only in the five most You can switch between the two by saying “Display North up,” or “Display Heading up,” or by touching the North pointer icon in the upper corner of the screen.In the larger map scales (above 2 mile or 3 kilometer), the map is always oriented with north facing upward. You cannot change the orientation.To view other areas on the map, move the joystick left, right, up, or down. The map will shift in that direction. Toreturn the map to your current location,press either the MAP/GUIDE , the CANCEL , or the BACK button on the steering wheel.The display automatically changes to the map screen when you reach your destination. Press the MENU button to return to the Enter destination by screen.NOTE: For information of theavailable voice commands, see Voice Command Index on page 113.detailed map scales (1/20, 1/8, 1/4, 1/2,and 1 mile, or 80, 200, 400, 800 meterand 1.6 kilometer).。
精准农业产品和技术介绍

变量控制系统——变化量数据
变量控制作业的基础之一,就是作物、土壤、虫害的空间分布数据。 比如土壤氮磷钾的分布图、作物长势分布图、病虫害的分布图等。
变量控制系统——变化量数据采集
这种空间分布的变化量的采集和分析通过两各方式实现: 事先采集:
通过结合定位系统土壤取样、通过遥感技术等。
实时采集:
变量控制系统——数据分析和变量控制
平地平整前后
原来的地面
平整后的地面
土地平整效果
激光平地示意图
激光平地原理
天辰激光平地系统特点
使用美国Topcon主要激光技术和部件 激光发射器发射距离是400m(半径) 激光精度1.5mm/30m 发射器自动整平,补偿范围±5° 可以设置水平面,也可以轻松设置坡度平面 平地铲采用高锰钢,坚固耐用,不同种长度规格
图片来源: 黑龙江宝泉岭农场
150自动驾驶系统特点
不改动原车液压,不破坏油路,方便保修。
150自动驾驶系统特点
自主电台式基站,不受网络信号限制,工作距离可达15公里以上。
150自动驾驶系统应用——起垄
150自动驾驶系统应用——开沟
图片来源: 江苏黄海农场
图片来源: 江苏黄海农场
150自动驾驶系统应用——播种覆膜
斗系统正式提供区域服务,覆盖亚太地区。
卫星导航系统家族
卫星导航系统在农业中的应用
土地测量
• 耕地调查 • 耕地边界测量(土地勘界) • 农田面积测量(区域)
农机导航与调度
• 农机(飞机)导航 • 农机调度与管理
农机自动驾驶 变量控制 产量监测
地理信息系统
地理信息系统是信息农业的基础;充分运用3S 技术、网络通讯技术及计算机技术等先进技术,建 立一个完善的、动态的、准确的信息库。 信息库主要包含信息: 农田基础信息 ●地块编号、位置、面积、形状、类型等 动态信息 ●土壤肥力 ●使用种子、化肥 ●作物长势等 统计信息 ●投入产出统计等
国外ITS发展情况1

8
欧洲ITS应用的例子
欧洲: PROMETHEUS (Program for European Traffic with Highest Efficiency and Unprecedented Safety) “普罗米修斯计划” – 1986年在EUREKA计划下的历时7年, $700 million – Daimler Benz牵头汽车产业界组织的项目,重点是对车辆的 改进。 DRIVE (Dedicated Road Infrastructure for Vehicle Safety in Europe) – DRIVE I (1989 to 1991), $130 million 道路基础设施智能化 。 – DRIVE II (1992 to 1994), $150 million 示范项目实验研究 、实现。
10
11
一、英国
1.2亿英镑投资“智能公路计划”2000年9月初,英国公路管理机构对未来1 0年中如何投 1.2亿英镑投资“智能公路计划”2000年 月初,英国公路管理机构对未来1 0年中如何投 资实施1.2亿英镑“智能公路计划”以及相关技术在政府的10年运输计划中发挥的作用 资实施1.2亿英镑“智能公路计划”以及相关技术在政府的10年运输计划中发挥的作用 进行了讨论。这个1000万英镑的投资项目于2001年夏天启动,计划2005年全部完成, 进行了讨论。这个1000万英镑的投资项目于2001年夏天启动,计划2005年全部完成, 届时,目前英国高速公路和干线公路上的5500部紧急电话将被取代。根据综合运输白皮 届时,目前英国高速公路和干线公路上的5500部紧急电话将被取代。根据综合运输白皮 书,该机构负责管理大约6500公里的干线路网,并且其作为路网的运营者将发挥新的作 书,该机构负责管理大约6500公里的干线路网,并且其作为路网的运营者将发挥新的作 用。虽然这部分的路网仅占英国公路里程的4%,但它承担了1/3的客运交通量2/3的货运 用。虽然这部分的路网仅占英国公路里程的4%,但它承担了1/3的客运交通量2/3的货运 交通量。在今后的10年中,交通量预计将增长20%左右。但是,全国交通拥挤控制的目 交通量。在今后的10年中,交通量预计将增长20%左右。但是,全国交通拥挤控制的目 标是今后10年内将其维持在目前水平的95%以下,公路管理机构的安全目标是到2010年 标是今后10年内将其维持在目前水平的95%以下,公路管理机构的安全目标是到2010年 减少1/3的死亡人数或重伤人数。该负责人还指出革新技术的“三组件”是新的可变信 减少1/3的死亡人数或重伤人数。该负责人还指出革新技术的“三组件”是新的可变信 息标志,自动事故探测仪和更新全国通讯光纤传输网。所有这些都是建立智能交通设施 的基础。 其中的关键技术如下: 1.为减少拥挤路段上游排队车辆的事故率,将于2004年在30%的高速公路上安装“自动 .为减少拥挤路段上游排队车辆的事故率,将于2004年在30%的高速公路上安装“自动 滞留警告系统”。 2.为减少交通干扰和交通事故,将于2004年在高速公路上安装200多台监控摄像机,使 .为减少交通干扰和交通事故,将于2004年在高速公路上安装200多台监控摄像机,使 其对交通事故和车辆故障等事件有更快的反应。 3.为减少重要交叉口的延误,将于2003年安装现在数量三倍以上的可变信号交通标志, .为减少重要交叉口的延误,将于2003年安装现在数量三倍以上的可变信号交通标志, 使其总量达到1500台,用于提供路径诱导。2002年,国家交通控制中心将提供实时的 使其总量达到1500台,用于提供路径诱导。2002年,国家交通控制中心将提供实时的 交通管理策略。这个投资额达几百万英镑项目的中标者将于年底揭晓。 公路管理机构认为,以后4 10年间以下几项将会有很大发展: 公路管理机构认为,以后4~10年间以下几项将会有很大发展: 1.引导长途交通流进入较少拥挤的路段,以达到平衡交通流的目的; 2.出行信息服务将覆盖全国和当地的路网范围; 3.信息服务和其它运输供应者提供的信息服务相互结合; 4.实现和其它西欧国家的交通和出行信息交换。
四轮转向液压底盘自动驾驶系统设计
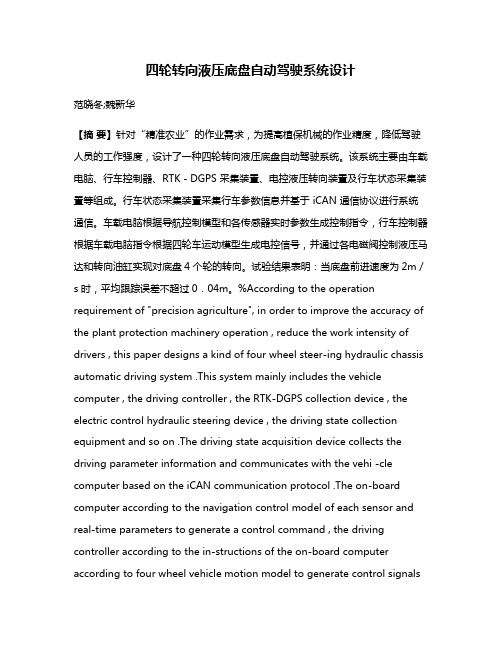
四轮转向液压底盘自动驾驶系统设计范晓冬;魏新华【摘要】针对“精准农业”的作业需求,为提高植保机械的作业精度,降低驾驶人员的工作强度,设计了一种四轮转向液压底盘自动驾驶系统。
该系统主要由车载电脑、行车控制器、RTK-DGPS 采集装置、电控液压转向装置及行车状态采集装置等组成。
行车状态采集装置采集行车参数信息并基于 iCAN 通信协议进行系统通信。
车载电脑根据导航控制模型和各传感器实时参数生成控制指令,行车控制器根据车载电脑指令根据四轮车运动模型生成电控信号,并通过各电磁阀控制液压马达和转向油缸实现对底盘4个轮的转向。
试验结果表明:当底盘前进速度为2m/s 时,平均跟踪误差不超过0.04m。
%According to the operation requirement of "precision agriculture", in order to improve the accuracy of the plant protection machinery operation , reduce the work intensity of drivers , this paper designs a kind of four wheel steer-ing hydraulic chassis automatic driving system .This system mainly includes the vehicle computer , the driving controller , the RTK-DGPS collection device , the electric control hydraulic steering device , the driving state collection equipment and so on .The driving state acquisition device collects the driving parameter information and communicates with the vehi -cle computer based on the iCAN communication protocol .The on-board computer according to the navigation control model of each sensor and real-time parameters to generate a control command , the driving controller according to the in-structions of the on-board computer according to four wheel vehicle motion model to generate control signalsand through the electromagnetic valve control hydraulic motor and steering oil cylinder on the chassis of a four wheel steering control . Test results showed that:when forward speed is 2 m/s, the average tracking error is no more than 0.04m.【期刊名称】《农机化研究》【年(卷),期】2017(039)005【总页数】6页(P253-258)【关键词】四轮转向;液压系统;CAN总线;RTK-DGPS;自动驾驶【作者】范晓冬;魏新华【作者单位】江苏大学现代农业装备与技术教育部重点实验室,江苏镇江212013;江苏大学现代农业装备与技术教育部重点实验室,江苏镇江 212013【正文语种】中文【中图分类】S219.032;S49农业机械智能化、自动化是“精准农业”的发展方向。
汽车导航系统的应用技术
摘要汽车导航是近年兴起的一种汽车驾驶辅助设备,驾车者只要将目的地输入汽车导航系统,系统就会根据电子地图自动计算出最合适的路线,并在车辆行驶过程中(例如转弯前)提醒驾驶员按照计算的路线行驶。
在整个行驶过程中,驾车者根本不用考虑该走哪条路线就能快捷地到达目的地。
当前的汽车导航系统包括两部分:全球定位系统和车辆自动导航系统。
汽车导航设备一般是由GPS天线,集成了显示屏幕和功能按键的主机,以及语音输出设备(一般利用汽车音响系统输出语音提示信息)构成的。
受车内安装位置的限制,一般汽车导航设备和汽车视像音响合成在一起,可以播放CD、VCD和DVD碟,其中DVD驱动器负责读取电子地图DVD光盘,因此,一些汽车导航系统又称为DVD 导航系统。
一、全球定位系统GPS介绍汽车导航系统必然要涉及到全球定位系统,即GPS。
GPS是英文Global Positioning System(全球定位系统)的缩写,它是由空间卫星、地面监控和用户接收等三大部分组成。
空间卫星由24颗卫星组成一个分布网络,分别分布在6条离地面2万公里、倾斜角为55°的地球准同步轨道上,每条轨道上有4颗卫星。
GPS卫星每隔12小时绕地球一周,使地球上任一地点能够同时接收7~9颗卫星的信号。
地面共有1个主控站和5个监控站负责对卫星的监视、遥测、跟踪和控制。
它们负责对每颗卫星进行观测,并向主控站提供观测数据。
主控站收到数据后,计算出每颗卫星在每一时刻的精确位置,并通过3个注入站将它传送到卫星上去,卫星再将这些数据通过无线电波向地面发射。
二、汽车导航系统汽车导航系统中的GPS信号接收器接收卫星发送的信号,根据卫星信号计算出地面接收机的当前位置。
如果地面接收机同时收到4颗以上的卫星信号,就能根据卫星的精确位置及发送信号的时刻,通过计算以求得当前地点的位置。
汽车导航系统通过车轮传感器、地磁传感器和偏航传感器等三种传感器获取数据,确定汽车的速度和位置。
卫星导航系统

中国BDS系统组成
空间段
BDS-3 地面段 用户段
静止卫 中星圆地 球倾轨斜卫同 步星轨道 主卫控星站
注入站
监测站 专用或兼容 用户终端
北斗提供的服务
开放服务,免费提供 • 定位(10米) • 测速(0.2米/秒) 授• 授权时服(务50纳秒)
3. 用户设备部分
用户部分观测和记录由若干卫星发送的数据,并运 用数学方法求得三维空间位置以及时间和速度
=
用户部分包括用户组织系统和根据要求安装相应的设备, 但其中心设备是GPS接收机。它是一种特制的无线电接收机, 用来接收导航卫星发射的信号,并以此计算出定位数据。
G
P 机内软件
接收天线
S
天线单元
美国GPS定位系统
➢起始于1958年,1964年投入使用。 ➢20世纪70年代,美国三军联合研制GPS
到1994年, 24颗星,全球覆盖率98%
➢精度最高覆盖范围最广的导航定位系统。 含军民两用。
俄罗斯GLONASS定位系统
➢发起于苏联时期,1993俄罗斯独自建设。 ➢2007年底,仅开放俄罗斯境内
六、GPS的优势和不足
1.GPS的优势
(1)全球、全天候工作。 (2)能为用户提供连续、实时的三维位置、速度
和精密时间,不受天气的影响。 (3)定位精度高:单机定位精度为10米,采用差分定位,
精度可达厘米级和毫米级。 (4)功能多,应用广:随着人们对GPS认识的加深,
GPS在各个领域得到广泛的运用。
五、 GPS在物流中的应用
1. 物流配送
GPS对车辆的状态信息(包括位置、速度、车厢内温 度等)以及客户的位置信息快速、准确地反映给物流 系统,由特定区域的配送中心统一合理地对该区域内 所有车辆做出快速地调度。这样便大幅度提高了物流 车辆的利用率,减少了空载车辆的数量和空载的时间, 从而减少物流公司的运营成本,提高物流公司的效率 和市场竞争能力,同时增强物流配送的适应能力和应 变能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 . 5 . 1 化 学 除 草
播后 苗前 采用 9 0 乙草 胺 2 . 2 I / h m。 +7 0 赛 克津 0 . 4 k g / h m 进 行 封 闭 灭 草 。苗 后 灭草 防 除禾 本 科
杂草 用 5 精 稳杀 得 1 0 0 0  ̄1 2 0 0 mL / h m +2 5 O虎威 1 5 0 0  ̄1 8 0 0 mL / h m , 杂草 在 叶龄 3 ~ 4叶 期 用 1 2 . 5 拿捕净 1 . 5 k g / h m。 ; 阔叶杂 草 叶龄 1 ~ 2叶 时 用 2 4 杂草焚 1 ~1 . 2 k g / h m。 进 行 防治 。 2 . 5 . 2 中耕
成 就 了其 导 航 的高 效 能 。
1 使 用 自动 驾 驶 系 统 进 行 起 垄 、 播种 、 喷药 、 收 获 等 农 田作 业 时 , 衔接行 距 ( 结合线 ) 的精
度 可达 2 . 5厘 米 , 可 以减 少 农 作 物 生 产 投 入 成 本 , 并 使 农 作 物 的种 植 农 艺 特 性 优 化 , 提 高 农 机
悬剂, 用量 1 . 5 k g / h m , 对水 4 5 0 k g / h m 喷雾 ; 也 可在 开 花 结 荚 期 每 公 顷 喷施 7 0 甲基 托 布 津 可 湿性 粉 剂
9 0 0 ~1 5 0 0 g或 4 0 多 菌灵 可湿 性粉 剂 1 5 0 0 g 。大豆 食心 虫 : 根据 虫 情 预报 , 用 8 O 9 / 5 敌 敌 畏 乳 油 制 成 毒 棒 熏
~
2 5 时, 适 宜机械 收获 。收 获 时期不 宜过 晚 , 否 则易 炸荚 使 收获损 失增 大 。
3 参 考 文 献
[ 1 ] 姜翠兰 , 王德亮 , 姜玉久 , 等. 高 产 抗 病 大 豆 新 品种 垦 豆 2 8号 的 选 育 及 栽 培 技 术 [ J ] . 现代化农业 , 2 0 1 2 ( 8 ) : 1 — 2 . E e l 鹿文成 , 闫洪睿 , 张雷 , 等. 早熟高产大豆新品种黑河 2 1的 特 征 特 性 及 栽 培 技 术 E J 3 . 黑 龙 江农 业 科 学 , 2 0 0 5 ( 1 ) : 6 4 — 6 5 . [ 3 ] 崔杰印 , 吴纪安 , 陈祥 金 , 等. 早 熟 高 产 大 豆 新 品种 黑 河 4 5的 选 育 及 栽 培 技 术 E J ] . 黑 龙 江农 业 科 学 , 2 o 1 2 ( 7 ) : 1 5 5 .
现 代 化 农 业
2 0 1 3 年 第 5期 ( 总第 4 0 6期 )
・ 6 9 ・
・
封 面 说 明
・
S Y S T E M1 5 0自Байду номын сангаас 导 航 驾 驶 系统
拓普康 S YS TE M1 5 0自动 导 航 驾 驶 系 统 , 是 美 国拓 普 康 公 司 农 业 导 航 的 代 表 , 成 为 现 代 农 机 标 准 化 作 业 的首 选 精 密 导 航 仪 。拓 普 康 S Y S TE M1 5 0导 航 仪 , 由于 其 众 多 的 创 新 设 计 ,
蒸, 用药 1 . 5 ~2 . O k g / h m ; 大 豆结 荚期食 心 虫蛾蜂 出现时 , 每公 顷 喷施 2 . 5 敌 杀死 乳油 6 0 O aL或 2 r . 5 A功 o
夫乳 油 4 3 0 0 mL。
2 . 6 适 时 收 获
大 豆叶 片脱落 达 9 0 时, 即可进 行人 工收 获 ; 叶片 全部脱 落 、 豆粒 归 圆 、 植 株响 铃 、 子粒含 水量 降到 2 0
第 1 次 中耕 在苗 前进 行 , 耕深 2 0 c m, 一定要 做 到三铲 三 趟 , 收获前 人工 拔 除 田间杂草 。
2 . 5 . 3 病 虫 害 防 治
大 豆灰斑 病 : 在大 豆花 荚期 , 当叶片 3 O 以 上 出现 病 斑 时 , 用 5 O 多菌 灵 可 湿性 粉 剂 或 4 O 多 菌 灵 胶
作业 质量 , 避 免 作 业 过 程 产 生 衔 接 行 的“ 重漏” , 降低 成 本 , 增加经济效益 , 提 高 农 机 标 准 化 作 业
标准。
2 在传 统农 机 作 业 中 , 农 业 机 械 只 能 依 顺 序 按 照 划 印器 的 划 痕 行 驶 ; 而 在 自动 驾 驶 系 统 中, 车辆 行 驶 的路 线 都 已根 据 GP S定 位 的 数 据 标 定 好 , 这 样 驾 驶 员 就 可 根 据 地 块 的 地 形 条 件 选 择 合 理 的路 线 作 业 。 3 通 过 GP S标 定 好 路 线 会 一 直 保 存 在 控 制 器 里 , 在 后 续 的作 业 中 继 续 使 用 。 比如 在 起 垄 时 设 定 的导 航 线 , 在 后 面 的播 种 、 喷药和收获时可继续使用 , 误 差 在 2厘 米 以 内 。 4 自动 驾 驶 技 术 可提 高拖 拉 机 或 谷 物 联 合 收 割 机 的 作 业 时 间 , 可 以实 现 夜 间农 机 作 业 , 大 大 地 提 高 了机 车 的 出勤 率 与 时 间 利 用 率 。