无砟轨道平顺性调整
线下变形地段Ⅱ型板式无砟轨道平顺性调整
线下变形地段Ⅱ型板式无砟轨道平顺性调整寇胜宇【摘要】根据高速铁路工程实践经验,总结了线下变形地段Ⅱ型板式无砟轨道平顺性调整原则,提出了不同线下变形情况下轨道平顺性调整方案,为我国高速铁路建设运营提供了技术支撑和保障.【期刊名称】《山西建筑》【年(卷),期】2015(041)005【总页数】3页(P124-125,193)【关键词】无砟轨道;线下变形;平顺性调整;高速铁路【作者】寇胜宇【作者单位】铁道第三勘察设计院集团有限公司,天津300142【正文语种】中文【中图分类】U213.244随着我国铁路高速化进程的推进,全国范围内已建设运营了上万公里高速铁路,为满足高速铁路高平顺性、高稳定性和高安全性等方面的要求,大部分高速铁路都采用了无砟轨道技术,尤其是Ⅱ型板式无砟轨道,如京津城际铁路、京沪高速铁路、京石客专和石武客专等项目。
高速铁路的建设运营受线下工程地质情况、区域地面沉降、地下水开采、沿线用地开发建设等诸多因素的影响,尤其是工程地质条件较差、区域地面沉降和地下水开采严重地段。
无砟轨道线下变形,尤其是差异变形会直接影响轨道平顺性,降低乘坐舒适性,甚至危及行车安全,而这种变形又是普遍存在无法避免的,所以,急需针对不同的线下变形情况,研究制定指导性的轨道平顺性调整原则和针对性的轨道平顺性调整方案,解决线下变形对轨道平顺性的影响,满足高速铁路运营要求。
1)轨道静态铺设标准。
我国TB 10621—2009高速铁路设计规定(试行)对无砟轨道静态铺设精度标准规定如表1所示。
2)工后沉降要求。
无砟轨道路基工后沉降应符合扣件调整能力和线路竖曲线圆顺的要求。
工后沉降不宜超过15 mm;沉降比较均匀并且调整轨面高程后的竖曲线半径符合(Rsh为沉降曲率半径,Vsj为设计速度)的要求时,允许的工后沉降为30 mm。
桥梁墩台工后均匀沉降限值为20 mm。
路基与桥梁、隧道或横向结构物交界处,桥梁相邻墩台的工后沉降差不应大于5 mm,不均匀沉降造成的折角不应大于1/1 000。
无砟轨道精调技术文
无砟轨道精调技术【摘要】通过沪宁城际铁路客运专线CRTS Ⅰ型板式无砟轨道及京沪高速铁路CRTS Ⅱ型板式无砟轨道静、动态两个阶段的轨道精调技术实践,结合高速动车组轨栓结果分析,对无砟轨道状态调整技术进展了系统的研究,总结了精调施工方法,提出静态适算控制标准,给出动态阶段的分析方法、调整原则和目标管理值。
【关键字】无砟轨道轨道精调一、轨道精调简介待铺轨单位对长钢轨铺设放散、锁定完毕后,即展开轨道精调作业。
前后分为静态调整和动态调整两个阶段。
静态调整到达静态验收标准后,开场联调联试。
开场联调联试后,精调工作进入轨道动态调整阶段,该阶段主要通过16 0km/h 轨检车和350km/h动车组对轨道状态进展检测和评估。
静态调整阶段:是根据轨道小车依据CPIII控制点进展静态测量轨道几何状态,通过软件分析后进展线形不断完善的调整过程。
包括对轨道线形〔轨向和上下〕进展优化调整,合理控制轨距变化率和水平变化率,使轨道静态精度到达规*要求。
动态调整阶段:主要通过对动态轨检车的数据进展分析结果,分点利用静态调整的方式对轨道进展调整。
动态检测结果评估分四级,一级点只需养护,二级点需重点调整,三级点限速行车,四级点停顿行车。
通过两个阶段的调整,最终使得无砟轨道轨道状态满足动车组高速运行的舒适性和平安性要求。
二、轨道扣件系统CRTS II型板式无砟轨道采用WJ-8C型扣件系统。
扣件组成:轨道板采用WJ-8C型扣件,WJ-8C型扣件〔以下简称扣件〕由螺旋道钉、平垫圈、弹条、绝缘块、轨距挡板、轨下垫板、铁垫板、铁垫板下弹性垫板和预埋套管组成。
每个小组配置的主要测量仪器、施工机具四、轨道板及扣件检查、清理长钢轨铺设前组织人员完成对施工现场的清理及修补工作〔包括对扣件孔的清理,道床板破损的修补,轨枕破损的修补,桥梁上单元板之间的清理及伸缩缝的整理、道床板裂缝的处理等工作〕。
轨道板应清理干净,不应有沙子、石子、混凝土残砟及建筑垃圾等。
浅谈高速铁路无砟轨道精测及调整
浅谈高速铁路无砟轨道精测及调整.doc高速铁路无砟轨道精测及调整一、简介高速铁路是指以机车行走速度达到或超过200公里/小时的铁路,它的特点是路线以直线曲线相结合,行车速度快,列车编组少,行车安全性要求高,因此在轨道施工及检修方面要求更严格。
无砟轨道精测及调整是在精密轨道技术中的一项重要技术,它是在轨道施工及检修中必不可少的技术,它能够保证轨道施工质量,改善行车安全性,提高轨道的使用寿命,减少轨道维修次数,降低运营成本。
二、原理无砟轨道精测及调整是将轨道按照相应的技术要求,利用仪器检测轨道的参数,如内轨距、外轨距、轨调,并根据检测结果进行调整,使轨道达到规定的技术要求。
1. 检测原理无砟轨道精测及调整是利用仪器对轨道进行检测,测量轨道的参数,并依据检测结果,调整轨道,使其能够达到要求。
检测轨道参数,主要分为三部分:内轨距检测,外轨距检测和轨调检测。
内轨距检测:利用仪器测量轨道两条轨边间的距离,即内轨距,并与规定的标准值进行对比,检测轨道两条轨边间的距离是否符合要求。
外轨距检测:利用仪器测量轨道两条轨边间的距离,即外轨距,并与规定的标准值进行对比,检测轨道两条轨边间的距离是否符合要求。
轨调检测:利用仪器测量轨道上每段之间的坡度,即轨调,并与规定的标准值进行对比,检测轨道上每段间的坡度是否符合要求。
2. 调整原理根据检测结果,对轨道进行调整,使其能够达到要求。
内轨距调整:如果内轨距超出标准值,可以采取向轨道中心移动轨边的方法,将轨道内轨距调整到标准值。
外轨距调整:如果外轨距超出标准值,可以采取向轨道中心移动轨边的方法,将轨道外轨距调整到标准值。
轨调调整:如果轨调超出标准值,可以采取更改轨道中段的坡度,将轨道轨调调整到标准值。
三、技术要求1. 检测技术要求在无砟轨道精测及调整过程中,主要检测内轨距、外轨距和轨调等参数,检测精度要求如下:内轨距:±3mm外轨距:±3mm轨调:±0.01‰2. 调整技术要求在无砟轨道精测及调整过程中,主要调整内轨距、外轨距和轨调等参数,调整精度要求如下:内轨距:≤±3mm外轨距:≤±3mm轨调:≤±0.01‰四、总结无砟轨道精测及调整是高速铁路施工及检修中必不可少的技术,它能够保证轨道施工质量,改善行车安全性,提高轨道的使用寿命,减少轨道维修次数,降低运营成本。
无砟轨道高平顺性维护方法研究

4 结论和建议
43
( )扣件更换前,认真核对现场轨道实际情况,找准需更换扣件 的轨枕 ( 3 结合枕木编号会使该 项工作精确 、高效 ) ,做出相应的标识 ,并用弦绳和道尺做必要的复核 。 现场按既有线施工规定做好
防护 。
( )更换 扣件 时 ,每次拆 除 扣件 不得连 续超 过 5根 枕木 ( 4 防止胀轨 ) ,并且在 更换 扣件 区段 两
辊 瞅 鲢
鎏 蜷
ts
Y
l I I I } { I l j . f I l I l f f f } 『 1 : } l ; I f l
一
≯ : ・ t ) / 2 ‘ 8 - c : 。 0 5 ; 一
轨道 调整 的经 验 ,对此 问题 进行 了有关 的探 索 。
2 测量质量Βιβλιοθήκη 制 轨道的平顺性分析来源于外业测量数据 ,外业测量数据 的准确真实对平顺性分析尤为重要 ,测 量数据如果存在 问题 ,会直接影响平顺性的分析,所以要对外业的数据采集进行质量控制,具体包
括如 下 几个方 面 。 2 1仪器 设备 的检 查 . 对 于无 砟 轨道 的公务 维护 , 目前 国 内采用 的都是 绝对 测 量 的方 式 , 因为只 有绝 对测 量 的方 式才 能保 证 高平顺 性 。这 种绝 对测 量 的模 式 一般 都 是配 备轨 检 小车和 全 站仪 ,轨检 小车 和全 站仪 需 要定 期 的检 查和现 场 的符 合 。对 于定 期检 查 需要 将 轨检 小车 和全 站仪 拿 到相 应 的部 门进 行全 面 的检 查和
道 管理 标准 ,表 1是 中国和 德 国的无 碴轨 道几 何 形位 管 理标准 。 n
3 4实例分析 . 本文就一段不平顺的无砟轨道做 了如下分析, 分析段里程从首先根据轨检小车的静态测量数据绘 出平面偏差、高程偏差、超高偏差和轨距偏差 的图形,标定出问题的区域 ,问题区域分为两种:一
无砟轨道精调作业指导书精选全文

可编辑修改精选全文完整版附件7无砟轨道精调作业指导书一、基本要求1.CPⅢ网重新复测,经评估合格方可应用于精调。
2.各位零配件安装到位,无缺少。
3.无碴轨道经过冲洗,无杂物,无灰尘。
4.无缝线路应力放散完毕且焊联、锁定。
二、准备工作1.各种规格材料基本到位。
2.绝对测量、相对测量小车经检验、调试合格。
3.各类机具齐备(轨距调整器、内燃扳手、无碴液压起道机、轨道仪、照明工具、数显道尺、塞尺、弦线、扭力测试仪、撬棍、改道小撬棍等)。
三、精调步骤1.总体流程。
2.精确测量。
为监测线路设备的变化,指导线路设备养护,需对轨道实测中线、高程进行绝对精度测量。
主要采用安博格小车与线路CPIII控制网实现对轨道精测。
⑴测量的前期准备工作①输入并核对设计数据(平曲线、竖曲线、超高、控制点,如存在断链,需分别输入,上、下行线也要分别输入)。
②设置项目属性,如平面位置和高程测量基准等。
③定期对全站仪及小车进行保养、检定。
⑵测量的现场工作①检查钢轨表面状态,检查扣件弹条与轨距挡板密贴。
确保零配件无缺少,扣件扭矩达标。
②正倒镜检查全站仪水平角和竖角偏差,如果超过3秒,在气象条件较好的情况下进行组合校准及水平轴倾斜误差(α)校准;检查全站仪ATR照准是否准确,有无ATR的偏差也应小于3秒。
③使用至少8个CPIII控制点自由设站,如果现场条件不满足,至少应有6个CPIII控制点,其中前后至少各使用一个60米以上的控制点。
根据天气条件确定最大目标距离。
状况好时控制在60m以内,不好时将距离缩短。
④设站的同时组装轨检小车,将双轮部分靠近低轨。
⑤在稳固的轨道上校准超高传感器,一般每天开始测量前校准一次,如气温变化迅速,可再次校准;校准后可在同一点进行正反两次测量,测量值之和应在0.3mm以内。
⑥将全站仪对准轨检小车棱镜,检查通信,关闭全站仪强力搜索,并锁定棱镜。
⑦放样60米以上的一个控制点对设站进行检核。
⑧进入施工模式,看偏差数据是否稳定,如不稳定(变化范围超过0.7mm),将小车向前推,找到数据相对稳定的距离,根据此距离再次重新设站。
武广铁路客运专线无砟轨道平顺性评估
无砟轨道 ・
武广铁路客运专线无砟轨道平顺性评估
周 全 能 ,潘 正 风
( 广 铁 路 客 运 专 线有 限责 任 公 司咨 询 项 目部 ,武 汉 武 4 06 ) 3 0 0
摘 要 : 分析 客 运 专 线 无 砟 轨 道 平 顺 性 与 轨 道 测 量 的 关 系 , 根 据 无 砟 轨 道 平 顺 性 的 特 点 。 比 3种 轨 道 短 波 平 顺 性 评 估 方 对 法, 结论 为 : 论 武 广铁 路 客 运 专 线 无 砟 轨 道 平 顺 性 的 评 估 宜 讨
换 成 中误 差 关 系 式
m = m
;+
假设各 点 的 m m m 相等 , 等于 m , 矢 高 中误 、 并 则
差 为
mv :
网, 并利用 高精 度全 站 仪 和轨 道 几何 状 态 测量 仪 来 测
定 轨 道 的 几 何 状 态 , 轨 道 进 行 精 确 调 整 。 另 一 方 面 对
文 章编 号 :0 4—2 5 2 1 ) —0 6 10 9 4( 0 0 01 0 4—0 2
Y l B 【 = 二 二正 二 二 二 . — = = = =
1 概 述
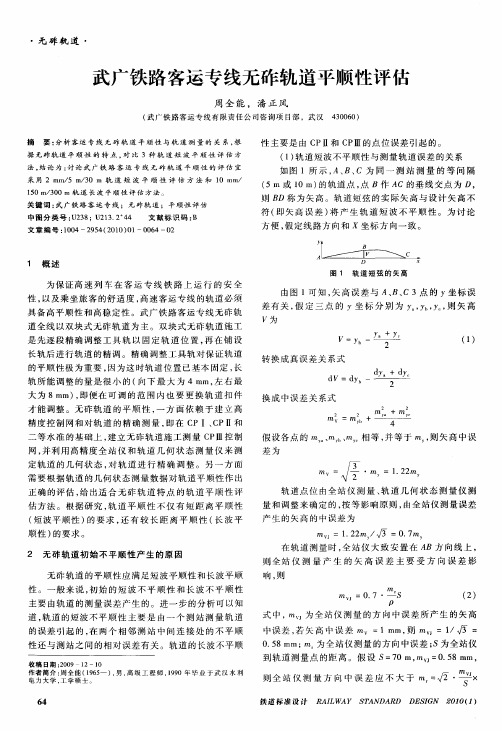
图 1 轨 道 短 弦 的 矢 高
为保证 高 速列 车在 客 运 专 线 铁 路 上 运 行 的 安 全 性, 以及乘 坐旅客 的舒适 度 , 高速客运 专线 的轨道 必须 具 备 高平顺性 和高 稳定性 。武 广铁路 客运专 线无砟 轨
性 主要是 由 C PⅡ和 c Ⅲ的点 位误差 引起 的。 P
( ) 道 短 波 不 平 顺 性 与 测 量 轨 道 误 差 的关 系 1轨
如 图 1所 示 , 、 C为 同 一 测 站 测 量 的 等 间 隔 曰、 ( 5m或 1 的轨 道点 , 口作 A 0m) 点 C的垂 线 交点 为 , 则 B D称 为矢 高。轨 道短 弦的实 际矢 高 与设 计矢 高不 符( 即矢 高 误 差 ) 产 生 轨道 短 波 不 平顺 性 。为讨 论 将 方便 , 假定线 路方 向和 坐标 方 向一致 。
II型板轨道平顺性调整
II型板轨道平顺性调整II型板轨道平顺性调整中铁十七局京沪项目部 2010年7月目录一、概述二、调整原理及步骤三、调整方案的确定 1、根据轨道板复测数据; 2、根据轨检小车测量结果; 3、根据动态检测车测量结果; 4、根据动车动力学指标;四、扣件更换调整一、概述无砟轨道系统的轨道平顺性主要依赖于精调轨道板或轨枕的精确就位,但由于轨道板或轨枕精调过程中的出现的偏差、以及梁体的收缩徐变、轨道铺设焊接的误差、轨道扣件系统误差等因素影响,铺轨后的轨道平顺性难完全达到要求,必须进行必要的轨道调整使其平顺性指标满足要求:规范平顺性要求:轨向:2mm,高低:2mm,(10m弦长)30m弦5m步距轨距:±1mm,三角坑(扭曲):±2mm (基长 3m),水平(超高):±2 mm。
* 新高铁规范平顺性指标的物理意义采用30m弦长(48个轨枕)测量,检测间隔5m的相邻检验点的实际矢高差与设计的矢高差的差值不超过2mm;长波是300m弦,间隔150m。
平顺性指标改进的探讨: 30m弦5m较差的局限性。
如果轨道线形已5m左右的周期呈规律的变化,虽然满足指标要求,但其平顺性仍不理想,如下图:各点轨向、高低的偏差改为与其相邻10m范围内相互比较偏差的最大值。
二、调整原理、步骤轨道方向及轨距调整通过更换轨距挡板进行,高程、高低、水平通过更换轨垫。
福斯罗扣件系统标准挡板规格左右都为“wfp15a”调整步距为1mm,可调范围为“-8mm~+8mm”。
高程通过更换轨垫调整,标准轨垫厚度(规格)为 6mm,调整步距为1mm,可调范围为“-4mm~+2mm”。
举例:轨道向右调整2mm,钢轨右侧挡板规格更换为“wfp15a-2”、左侧更换为“wfp15a+2” 。
轨道调高2mm,该处轨垫规格更换为8mm。
2.2步骤轨道调整前必须先确定发生偏差的具体轨枕位置、方向、大小,确定扣件更换规格。
步骤:轨道测量(测量承轨台或钢轨)→ 计算分析轨道平顺性→对超限点进行模拟调整→ 根据模拟的调整方案更换扣件调整→复测验证。
高速铁路无砟轨道测量与调整
安伯格技术公司
轨道几何参数测量:平面位置基准
安伯格技术公司
轨道几何参数测量:轨面高程基准
安伯格技术公司
轨道几何参数测量:轨向与高低
安伯格技术公司
轨道几何参数测量:长短波不平顺
30米弦
每隔5米检核
300米弦 每隔150米检核
安伯格技术公司
轨道几何参数测量:验收标准
测量参数 轨距 水平 /超高 轨向高低 短波不平顺 长波不平顺 平面位置 (区间轨道) 轨面高程 (区间轨道) 平面位置 (道岔) 轨面高程 (道岔) 轨距变化率 扭曲 MOR(仅供参考) +/- 1 +/- 1 2mm, 10m弦 2mm/8α, 基线长48α 10mm/ 240α, 基线长480α +/- 10 +/- 10 +/- 2 0/-5 1mm/3m 2mm/6.25m DB +/- 2 +/- 2 2mm/5m, 30m弦 10mm/150m, 300m弦 +/- 10 +/- 10 +/- 10 +/- 10 1mm/1.5m(BWG道岔) 2mm/2.5m
轨道静态几何参数测量方法
安伯格技术公司
无砟轨道几何参数
轨道几何参数可分为绝对几何参数和相对几何参数 绝对几何参数是指轨道实测中线坐标、轨面高 程及其与设计坐标和高程的偏差;偏差越小, 定位精度越高。 相对几何参数是指轨距、水平(超高)及其偏 差和变化率,轨向和高低偏差及长短波不平顺 等;数值越小轨道越平顺。
曲线设计超高值
轨枕编码方法
安伯格技术公司
GRPwin软件:平曲线
首先输入起点里程,然后选择曲线要素类型,并输入每一曲 线要素的起点坐标、缓和曲线长度或圆曲线半径(右转曲线 半径为正值);长短链处需分为两段设计中线
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无砟轨道无砟轨道平顺平顺平顺性性调整
栾显国1
(1. 中铁十九局 辽宁省辽阳市 111000)
摘要摘要::本文介绍了轨道平顺性的概念,及其评价方法。
提出了一种无砟轨道平顺性调整的方法及其工 作流程。
通过实例分析,得出了关于无砟轨道平顺性调整的一些结论和建议。
关键词关键词::平顺性;定弦检测;动弦检测;无砟轨道;
1. 引言
随着我国无砟轨道的建设的不断开展,建成后的无砟轨道的平顺性的保证显得尤为重要,如何进行无砟轨道平顺性的调整,如何调整是最合理的最优的是摆在技术人员面前的难题。
由于我国引进无砟轨道技术时间尚短,对此问题尚没有深入的研究,本文结合笔者无砟轨道施工的经验,对此问题进行了有关的探索。
2. 平顺性评价方法介绍
所谓平顺性就是指两根钢轨在高低和左右方向与钢轨理想位置几何尺寸的偏差。
实践中通常用拉弦测量的方法对轨道不平顺值进行测量。
2.1 国内平顺性评价方法
国内传统上使用的是固定弦长(比如直线上10米,曲线上20米),评价中间点的矢度,如果要评价下一点的矢度,则将该弦线前移至下一点,被评价点始终对应弦线的中间位置,该方法后文中简称“动弦检测”。
该方法一直在我国有碴铁路施工和工务维护中沿用至今。
它的检测示意图如下:
图1 国内平顺性检测示意图
其数学模型如下:
∆H = h 实测 – h 设计 (1)
公式1中h 为正矢值,H 为绝对偏差[1]。
2.2 德国平顺性评价方法
随着无砟轨道技术的引进,另一种轨道平顺性的检测方法逐渐被国内相关工作人员所接受。
就是拉一条长弦,并将其固定,然后逐点评价弦线范围内所有点的矢度,继而分析其相对偏差,该方法后文中简称“定弦检测”。
检测示意图如图2。
图2 德国平顺性检测示意图
图2中的点是钢轨支承点的编号,以1P 到49P 表示。
25P 与33P 间的平顺性检测按下式计算:
)()(33253325实测实测设计设计---h h h h h =∆ (2)
由于1P 与49P 的正矢为零,故可检测2P (对应点10P )到40P (对应点48P )的平顺性。
新的弦线则从已检测的最后一个点40P 开始[2]。
经过专家论证,定弦检测(30m 弦,2mm/5m )的轨道短波不平顺限差要求比动弦检测(10米弦,2mm/5m )的限差要求更为严格,新建的无砟轨道的平顺性的调整都采用定弦进行检测[3]。
3. 3. 基于基于基于““定弦检测定弦检测””法的无砟轨道平顺性调整无砟轨道平顺性调整
无碴轨道平顺性调整的特殊性在于,不能像有碴轨道一样机算出拨道量和拨道量,利用捣固机将轨道整体调整到位。
无碴轨道平顺性的调整必须两股钢轨分开调整,这就需要考虑轨距和轨向的相互影响,高低和超高的相互影响。
根据国外的经验,无砟轨道平顺性调整要使用专门的测量设备和计算软件。
调整工作包含如下步骤:
动态测量确定问题区段,
采用具有绝对测量功能的轨检小车进行静态测量
利用专用软件计算调整量
现场扣件更换
轨道复测
3.1动态检测
动态检测是利用轨道检查车通过跑车的方式来获得轨道的平顺性信息。
动态检测设备可以测量轨道几何、线路标志、钢轨断面、钢轨磨耗、环境视频等。
轨道几何及断面测量采用梁结构方式的惯性测量及摄像式的图像测量原理,轨道几何包括不同波长的高低和轨向、
轨距、水平、三角坑、超高、曲线半径、复合不平顺等。
检测系统可进行超限判断和各类报表输出。
动态检测的优点在于它的快速,更真实的反应轨道的现状。
下图为武汉至广州线无砟轨道的一段动检结果[4]如图3所示。
根据动检数据我们就可以得到晃车区段大概位置。
图3 武汉-广州线动检数据图
3.2静态检测
由于动检数据的特殊性,并不能直接根据动检数据进行轨道的平顺性调整。
所以动检后我们还要进行静态检测,对动检标定出的问题区间进行静态的测量。
静态测量的数据包括:平面位置的偏差、高程的绝对偏差、超高偏差、轨距偏差等。
它们是计算轨道调整量的基础。
需要指出的是,无砟轨道平顺性的调整是根据轨道的绝对偏差进行调整量的计算,这与基于相对偏差的有碴轨道平顺性调整有着本质的不同。
所以,静态测量建议采用具有绝对测量功能的轨检小车进行,如瑞士生产的Amberg GRP1000轨道精调系统[5]。
3.3计算调整量
计算调整量的工作要借
助于一个专业软件(DTS 轨
道快速静调系统)来实现。
计算调整量时一定要注
意基准的确定和调整的先
后顺序[6]。
所谓基准的确定
就是确定出平面位置和高
程以那条钢轨作为基准。
基
准确定好后,就是确定调整
的先后顺序,首先要调整基
准轨的轨向和高低,将基准
轨的轨向和高低调整好后,
再进行超高和轨距的调整。
调整的依据就是相关的轨道管理标准,表1是中国和德国的无碴轨道几何形位管理标准[7]。
3.4 实例分析
本文就中铁十九局武汉-广州线的一段不平顺的无砟轨道做了如下分析,分析段里程从首先根据轨检小车的静态测量数据绘出平面偏差、高程偏差、超高偏差和轨距偏差的图形,标定出问题的区域,问题区域分为两种:一种是单独的波峰或波谷情况,另外一种是连续的波峰波谷情况。
两种情况如5和6所示:
图4 单独的波峰情况
表1 中国和德国不平顺性指标
图5 连续的波峰波谷情况
图4和图5中左侧的三列数据分别为平面位置的绝对偏差、轨向(短波5米)不平顺信息和轨距偏差值;三条线分别为平面偏差曲线,轨距变化率曲线和轨距偏差曲线。
对于上诉的两种情况,利用削去波峰和填波谷的方法处理问题区间。
在削峰和填谷时候还要兼顾图形的平顺,不要出现多个小弯连续的情况。
处理好轨向的不平顺之后,还要兼顾轨距,将轨距调整到要求的范围之内,对上诉两种情况的调整比对结果如图6和图7所示:
图6 单独的波峰调整前后比对
图7 连续的波峰和波谷调整前后比对
综合这两种情况来看,第二种情况更不容易调整。
高低的不平顺的调整与轨向的不平顺调整的原理相同。
根据这样的原则进行完轨道平顺性的调整后就可以获得轨道的调整量,技术人员就可以到现场更换扣件,进而完成轨道的调整工作,保证轨道的平顺性。
4.结论和建议
轨道的平顺性决定着旅客乘车的舒适度,而轨道的严重不平顺会引起车辆脱轨,危及旅客的生命和财产,所以轨道平顺性的调整显得尤为重要。
通过对数据的分析和根据个人对轨道调整的经验对轨道调整有如下建议:
1) 动态检测数据和静态检测数据结合分析
2) 基准的确定和调整的先后顺序要正确
3) 根据数据偏差图形进行削峰填谷处理
4) 多次调整直至调整的结果优化和合理
参考文献参考文献::
[1] 高速铁路的轨道平顺性问题,铁路建筑,1991年S1期
[2]肖书安,Leica GRP1000轨道测量系统用于无碴轨道施工测量,铁道标准设计,2006(12)
[3]平顺性标准分析,铁道部会议
[4]京津城际铁路试运行轨道动态检测数据分析,工务工程,2009
[5]瑞士Amberg 公司GRP1000轨道测量系统使用手册,力铁轨道技术有限公司翻译,2005
[6]DTS 轨道快速静调软件使用手册,力铁轨道技术有限公司,2009
[7]客运专线无砟轨道铁路工程施工质量验收暂行标准,中国铁道出版社,2007
第一作者简介第一作者简介::栾显国
E-mail: 电话:
The Adjustment for The Slab Track Regularity
Abstract: This article introduces the concept of the track regularity and the evaluation method. A kind of method for the slab track regularity and work flow are put forward. Through the analysis of the case, some conclusions and advices for the adjustment of the slab track regularity are accepted.
Key words: regularity ;fixed chord detection ; floating chord detection ; slab track。