恒定导通时间 (COT) 降压稳压器
降压稳压器架构(COT降压稳压器)
4.4 恒定导通时间(COT) 降压稳压器恒定导通时间(COT)迟滞稳压器对于一个给定的V IN ,当负载电流变化时,导通时间是恒定的Ripple is needed to properly switch the comparator!!R F2R F1+-ErrorComparatorModulatorV REF+-R LR C(ESR)V INV OUTPower StageLCOne-Shot Inversely Proportional to V INV FB •优势–相对于VIN 的变化频率保持恒定–可在轻负载下实现高效率–快速瞬态响应•劣势–在反馈比较器上需要纹波–对输出噪声很敏感(因为它转换为反馈纹波)功率管导通时间与Vin 成反比工作频率(连续)T ON 为导通时间,F S 为工作频率。
恒定导通时间控制器负责设定降压开关的导通时间。
K 是一个常数,R ON 是一个编程电阻器。
V IN 如预期的那样在分母当中,将导通时间设定为与V IN 成反比。
重新整理并将T ON 代入第一个公式,然后求解F S恒定导通时间可实现接近恒定的频率开关频率几乎是恒定的;变化是由于RDS-ON 、二极管电压和RON引脚输入阻抗的影响造成的注:一个连接在VIN 和RON之间的电阻器负责设定导通时间恒定导通时间稳压器波形(不连续)对于COT 稳压器,假如电感器电流保持连续,则恒定频率关系式成立。
在轻负载条件下,电感器中的电流将变得不连续。
这里示出的是在不连续导通模式中采用恒定导通时间控制方法进行控制(这意味着斜坡电感器电流每个周期都恢复至零)的降压稳压器的开关波形。
初始配置电路•V OUT 上的纹波电压为电感器的纹波电流x R3 •由于电感器的纹波电流随V IN 的增加而增加,因此V OUT 上的纹波电压也随之增加FBSWL1C2R1R2BSTVCCC3C4D1V OUTRON/SDVINInput VoltageC1RTNSGNDR ONR3Ripple here must be>25 mVp-pRipple here is greater than that at FB by the ratio of(R1+R2)/R2.LM2695初始配置瞬态响应输出电压LM2695 初始电流V IN = 12V, VOUT= 10V负载瞬态响应400 mA100 mA 50 mV利用1 个电容器减低纹波!增设C5 将使FB 上的纹波与V OUT 上的纹波相同,而无需借助R1 和R2 的衰减作用。
天下“武功”,为快不破——COT控制模式
天下“武功”,为快不破——COT控制模式天下武功,⽆坚不摧,唯快不破!⽆论是武侠⼩说⾥的绝顶武功(如东⽅不败的“绣花针”,⼩李飞⼑,凌波微步等),还是实战场上的战⽃机,拼的全是速度,就连今年年初突如其来的新冠疫情,决胜的秘诀都与响应的速度息息相关。
那么在Buck电路中说到快速响应,会有什么东西闯⼊各位看官的脑海呢?没错,就是它——恒定导通时间控制模式(COT控制模式)!今天我们就来聊聊它。
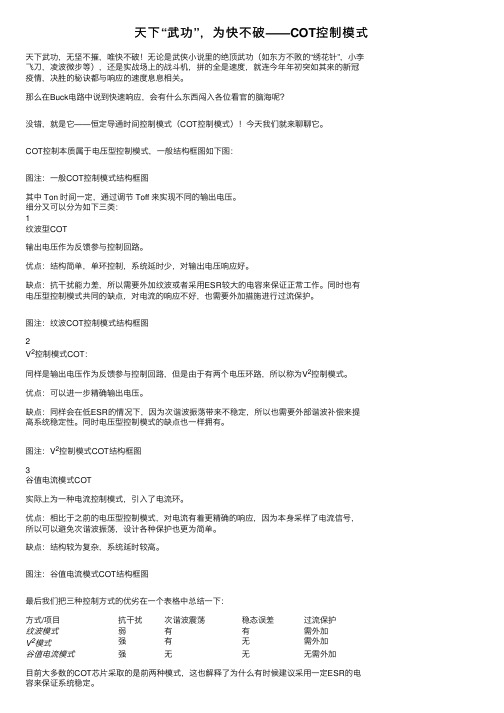
COT控制本质属于电压型控制模式,⼀般结构框图如下图:图注:⼀般COT控制模式结构框图其中 Ton 时间⼀定,通过调节 Toff 来实现不同的输出电压。
细分⼜可以分为如下三类:1纹波型COT输出电压作为反馈参与控制回路。
优点:结构简单,单环控制,系统延时少,对输出电压响应好。
缺点:抗⼲扰能⼒差,所以需要外加纹波或者采⽤ESR较⼤的电容来保证正常⼯作。
同时也有电压型控制模式共同的缺点,对电流的响应不好,也需要外加措施进⾏过流保护。
图注:纹波COT控制模式结构框图2V2控制模式COT:同样是输出电压作为反馈参与控制回路,但是由于有两个电压环路,所以称为V2控制模式。
优点:可以进⼀步精确输出电压。
缺点:同样会在低ESR的情况下,因为次谐波振荡带来不稳定,所以也需要外部谐波补偿来提⾼系统稳定性。
同时电压型控制模式的缺点也⼀样拥有。
图注:V2控制模式COT结构框图3⾕值电流模式COT实际上为⼀种电流控制模式,引⼊了电流环。
优点:相⽐于之前的电压型控制模式,对电流有着更精确的响应,因为本⾝采样了电流信号,所以可以避免次谐波振荡,设计各种保护也更为简单。
缺点:结构较为复杂,系统延时较⾼。
图注:⾕值电流模式COT结构框图最后我们把三种控制⽅式的优劣在⼀个表格中总结⼀下:⽅式/项⽬抗⼲扰次谐波震荡稳态误差过流保护纹波模式弱有有需外加V2模式强有⽆需外加⾕值电流模式强⽆⽆⽆需外加⽬前⼤多数的COT芯⽚采取的是前两种模式,这也解释了为什么有时候建议采⽤⼀定ESR的电容来保证系统稳定。
提高降压变换器轻载效率的改进型恒定导通时间控制方法
第22卷第5期2021年5月电气技术Electrical EngineeringV ol.22 No.5May 2021提高降压变换器轻载效率的改进型恒定导通时间控制方法李涛1钟成2钱挺1(1. 同济大学电气工程系,上海 201804;2. 深圳振华微电子有限公司,广东深圳 518057)摘要本文提出一种数字化控制方法,用以提高恒定导通时间控制Buck变换器的轻载效率。
不同于传统恒定导通时间控制方法,所提方法通过增大恒定导通时间控制Buck变换器轻载状态时的导通时间,以进一步降低变换器开关损耗、提高轻载效率。
此外,所提方法无需增加外部传感检测电路,可直接根据开关频率变化来判断电感电流过零点,使变换器工作在电感电流断续状态以降低导通损耗。
通过理论分析和相应实验验证了所提方法的可行性。
关键词:恒定导通时间(COT)控制;数字化控制;Buck变换器;轻载效率Improved constant on-time control method forimproving light-load efficiency of Buck converterLI Tao1 ZHONG Cheng2 QIAN Ting1(1. Department of Electrical Engineering, Tongji University, Shanghai 201804;2. Shenzhen Zhenhua Microelectronics Co., Ltd, Shenzhen, Guangdong 518057)Abstract A digital control method is proposed to improve the light-load efficiency of the Buck converter with constant on-time (COT) control. Different from the traditional constant on-time control, the proposed method increases the on-time of constant on-time controlled Buck converters at light-load states to reduce the switching loss and improve the light-load efficiency. In addition, the proposed method uses digital control to determine the zero-crossing point of the inductor current based on the switching frequency without adding the external detection circuit, which makes the synchronous switcher work in discontinuous conduction mode (DCM) and reduces conduction loss. The feasibility of the proposed method is verified by theoretical analysis and corresponding experiments.Keywords:constant on-time (COT) control; digital control; Buck converter; light-load efficiency0引言随着互联网和物联网技术的发展,便携式设备(如手机和智能穿戴设备)等电池供电设备的使用显著增多,由于其待机模式下使用时间长,因此轻载下提高变换器的效率显得尤为重要[1-3],这有利于提高待机时间和电池寿命。
具备恒定导通时间(COT)调制器的集成负载点(POL)稳压器

Di e Ico p r t d od s n r o a e , t /www. o sc , p: f / dide om
具备恒定导通时 间( COT 调制器 ) 的集成负载点 ( O ) P L 稳压器
I 4x R3 7 系列支持高达2 V的输入 电 7
压 ,并 提 供 4 m ×5 m mm和 5 m mm m x6
型 的主要有 4 大优 点 ,分 别是 :安全规 AP 3 2 款 新 型 双 固 定 输 出 器 件 压 差 ( 7 3两 DCM) 连 续导 通模 式 ( M ) 作 。这 或 CC 运
格 ,最 大输 入 电压 10 V 0 0 RM S 值分别 为 l 0 ,CAT mV ̄ 3 0 5 N 0 mV,典型额 定 项技术包含 无电流检 测电路的简单控制 I 6 0 V 0 V;监测 电能 质量 的 同时 能 长 时 静 态 电流 仅 为6 0u A。为 了充分 使 用 方 法 ,能 够 提 供 更 好 的 抗噪 能 力 。
F AN6 0 采 用 专 有 的 创新 线 性 预 测 使其 易于扩 展来满足最优价格和效能需 24 时序 控 制 技 术 ,不 受 限 于S MOS E 求 。新 器件I 4 x l R3 6 适用于节 R FT 7 fI 8x R3 l
6 8 今B电子 .21年4 01 月
简 化 , 因为 稳 压 器 可利 用单 个SOT 6 I 模块停止 工作 ,从而进一步降低工作 2或 C
5 A负载 时的 电压 差 为 10 (  ̄n 3mV,这 些特 DF 0 8 封 装 为 内 核 ¥ IO操 作 提供 电流。在轻载条件下 ,功 耗维持在最低 N2 1 6 D/
件。
Hl OKI
输 出 器 件 为 设 计 师 带 来 了 1 种 不 同 的 3 固 定 输 出 电 压 组 合 ,从 1 0 . V/1 0 .V到
降压式DC-DC转换器中的恒定导通时间谷值电流模式控制
降压式DC-DC转换器中的恒定导通时间谷值电流模式控制newmaker恒频峰值电流控制方案使用两个环路从高输入电压产生低输出电压,分别是电压外环和电流内环。
在控制信号和输出信号之间存在最小相移,由此可以实现简单的补偿。
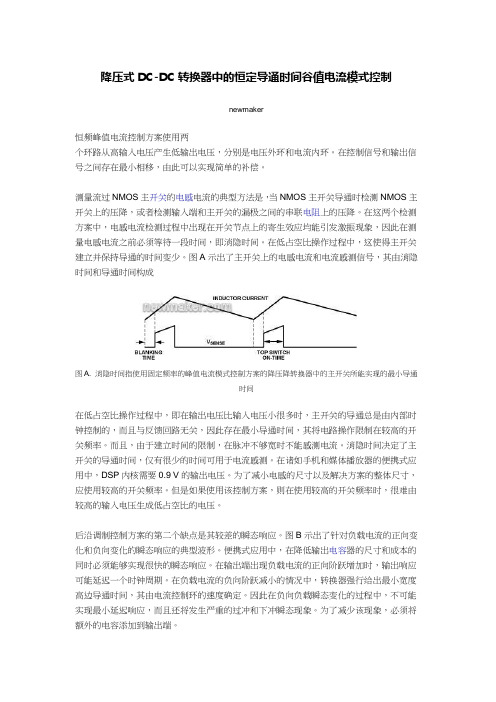
测量流过NMOS主开关的电感电流的典型方法是,当NMOS主开关导通时检测NMOS主开关上的压降,或者检测输入端和主开关的漏极之间的串联电阻上的压降。
在这两个检测方案中,电感电流检测过程中出现在开关节点上的寄生效应均能引发激振现象,因此在测量电感电流之前必须等待一段时间,即消隐时间。
在低占空比操作过程中,这使得主开关建立并保持导通的时间变少。
图A示出了主开关上的电感电流和电流感测信号,其由消隐时间和导通时间构成图A. 消隐时间指使用固定频率的峰值电流模式控制方案的降压降转换器中的主开关所能实现的最小导通时间在低占空比操作过程中,即在输出电压比输入电压小很多时,主开关的导通总是由内部时钟控制的,而且与反馈回路无关,因此存在最小导通时间,其将电路操作限制在较高的开关频率。
而且,由于建立时间的限制,在脉冲不够宽时不能感测电流。
消隐时间决定了主开关的导通时间,仅有很少的时间可用于电流感测。
在诸如手机和媒体播放器的便携式应用中,DSP内核需要0.9 V的输出电压。
为了减小电感的尺寸以及解决方案的整体尺寸,应使用较高的开关频率。
但是如果使用该控制方案,则在使用较高的开关频率时,很难由较高的输入电压生成低占空比的电压。
后沿调制控制方案的第二个缺点是其较差的瞬态响应。
图B示出了针对负载电流的正向变化和负向变化的瞬态响应的典型波形。
便携式应用中,在降低输出电容器的尺寸和成本的同时必须能够实现很快的瞬态响应。
在输出端出现负载电流的正向阶跃增加时,输出响应可能延迟一个时钟周期。
在负载电流的负向阶跃减小的情况中,转换器强行给出最小宽度高边导通时间,其由电流控制环的速度确定。
因此在负向负载瞬态变化的过程中,不可能实现最小延迟响应,而且还将发生严重的过冲和下冲瞬态现象。
半导体cot模式
半导体cot模式半导体COT(Constant On-Time)控制模式是一种先进的控制策略,用于管理电力电子转换器的开关行为。
在COT控制模式下,开关的开通时间恒定不变,而关断时间则随着系统需求和状态变化而动态调整。
这样可以提高系统的稳定性和效率,同时降低开关损耗和电磁干扰。
COT控制模式的工作原理基于滞环控制模式发展而来。
在基本的迟滞控制中,功率管的导通时间由一个单稳态计时电路(One Shot)控制,使功率管导通一个恒定的时间。
当反馈电压低于参考电压时,比较器的输出会拉高,SR latch被置位,Q输出也拉高,功率管就会打开。
电感电流线性上升,输出电压纹波以及反馈电压上的纹波也会上升,因此,比较器的输出会立马拉低,形成一个脉冲。
而Q输出拉高同时,也启动了单稳态计时器,直到这个固定开通时间结束。
单稳态定时器输出翻转拉高,复位SR latch。
当结束功率管开通的过程后,电感电流下降,输出电压纹波也下降,直到反馈电压再一次低于参考电压,开启新的周期。
在COT控制模式下,开关的开通时间由定时器确定,不受输入电压或负载变化的影响。
一旦定时器到达设定时间,不管系统状态如何,开关都会自动关断。
然后系统会重新开始计时,直到下一次定时器到达设定时间。
这种控制方式可以减少开关次数,降低开关损耗和电磁干扰。
同时,由于COT控制模式不需要复杂的电流和电压检测电路,因此可以简化系统设计并降低成本。
COT控制模式在许多领域都有应用,如电机控制、逆变器和电源管理等。
在电机控制中,COT控制模式可以用于实现恒定转矩或恒定速度控制。
在逆变器中,COT控制模式可以用于实现直流到交流的转换,为负载提供稳定的交流电源。
在电源管理中,COT控制模式可以用于管理多个电源的切换和分配,以确保系统的高效和稳定性。
总之,COT控制模式是一种先进的半导体控制策略,具有许多优点。
它可以提高系统的稳定性和效率,降低开关损耗和电磁干扰,简化系统设计并降低成本。
LED路灯设计方案

美国国家半导体LED驱动器应用于路灯系统 Download!内容•采用美国国家半导体降压LED 驱动器的传统LED 路灯。
–LM3402–LM3404–LM3406–LM3409•采用美国国家半导体升压LED 驱动器的太阳能LED 路灯–LM3423–LM3424太阳能LED路灯系统传统LED 路灯系统调光控制mV 反馈电压即使输入电压范围很大,频率也能相对保持恒定断续连续恒定导通时间控制的优点•无需采用误差信号放大器,也无需提供环路补偿–卓越的瞬态响应–只需极少外置元件–系统成本较低–容易使用–更稳定可靠•采用固定频率模式操作–开关控制比迟滞控制方式稳定–L-C 值不会影响工作频率–较少输出纹波,可以更有效抑制电磁干扰–较易融入系统设计LM3406/06HV: 1.5A 降压LED 驱动器•内置2.0A MOSFET•V IN范围: 6V-42V (LM3406)•V IN范围: 6V-75V (LM3406HV)•利用专用的逻辑输入或电源输入电压电路实现PWM调光•无需控制环路补偿•导通时间随着输入及输出电压的变动而改动⇒无论输入电压大小以及LED 数目有什么变动,纹波电流都不会出现任何波动•低功耗关断•支持所有的陶瓷输出电容器以及无电容输出•过热保护电路•eTSSOP-14封装输出电压差采用eMSOP-10 封装驱动1W、3W、5W以及更大功率的LED本页已使用福昕阅读器进行编辑。
福昕软件(C)2005-2010,版权所有,仅供试用。
检测电感器的峰值电流:利用外置并行FET 执行PWM 调光功能•PWM 调光功能由EN 节点利用外来信号加以控制。
美国国家半导体的方案有什么优点•业内最高的转换效率可以从根本上解决IC的温升问题,保证系统的可靠性。
–路灯的应用环境十分恶劣,灯头内的环境温度可高达80o C。
而一般工业级IC的最高工作结温为125o C。
因此只有解决了效率问题,才有可能保证系统的可靠性。
可采用单电阻设置和非常容易并联的3A LDO
满 载 效率 。
I 3 7 ;l 8 x u l Bu k R 4 x ̄ I 6 S p R c 系列 R3
压型稳压器
LT3 8 具 双 通 道 上 电 复 位 定 时 器 68 过 对 PA输 出 级 电源 电压 进 行 调 节 ,可 大 大 降 低 PA功 耗 。 设 计 人 员可 以 控 制 PA的 电 源 电 压 , 以 满 足 发 送 功 率 的 要
和一 个看 门狗 定时 器 。其 3 8 6 . ~3 V输
电话 :0 0 6 1 5 9 1— 2 卜 19
, t /www. a i ・ . om . l , p: f / m xm i c c C1
数安培 的线性调节 ,而无须散 热器。
位 定 时 器 ;可 同 步 、 可调 节 3 0 ~ 5 kHZ
性 能 特 点 : 输 出 电 流 3 ; 用 单 2 2 Hz 开关 频 率 ;两 个 具 内部 电 源 A .M 的 个 电 阻 器 设 定 输 出 电 压 ; 准 确
提 供0 5 .V、 1 度内部参 考 电压 ,因 %精
而 拥 有 非 常 低 和 精 确 的 输 出 电 压 可 编 程
能 力 。新 产 品提 供 一 系列 丰 富 功 能 ,其
中包 括 过 热 保 护 、 热 补 偿 过 流 保 护 、 过
压 及 欠 压 保 护 、预 偏 置 启 动 、 电源 良 好
LT3 8 可 并 联 以 分 散 热 量 ,并 提 03
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.4 恒定导通时间(COT) 降压稳压器
恒定导通时间(COT)迟滞稳压器
对于一个给定的V IN ,当负载电流变化时,导通时间是恒定的
Ripple is needed to properly switch the comparator!!
R F2
R F1+
-Error
Comparator
Modulator
V REF
+-
R L
R C
(ESR)
V IN
V OUT
Power Stage
L
C
One-Shot Inversely Proportional to V IN
V FB •优势
–相对于VIN 的变化频率保持恒定
–可在轻负载下实现高效率
–快速瞬态响应
•劣势
–在反馈比较器上需要纹波–对输出噪声很敏感
(因为它转换为反馈纹波)
工作频率(连续)
T ON 为导通时间,F S 为工作频率。
恒定导通时间控制器负责设定降压开关的导通时间。
K 是一个常数,R ON 是一个编程
电阻器。
V IN 如预期的那样在分母当中,将导通时间设定为与V IN 成反比。
重新整理并将T ON 代入第一个公式,然后求解F S
恒定导通时间可实现接近恒定的频率
开关频率几乎是恒定的;变化是由于R
DS-ON 、二极管
电压和R
ON
引脚输入阻抗的影响造成的
注:一个连接在V
IN 和R
ON
之间的电阻器负责设定导
通时间
恒定导通时间稳压器波形(不连续)
对于COT 稳压器,假如电感器电流保持连续,则恒定频率关系式成立。
在轻负载条件下,电感器中的电流将变得不连续。
这里示出的是在不连续导通模式中采用恒定导通时间控制方法进行控制(这意味着斜坡电感器电流每个周期都恢复至零)的降压稳压器的开关波形。
初始配置电路
•V OUT 上的纹波电压为电感器的纹波电流x R3 •由于电感器的纹波电流随V IN 的增加而增加,因此V OUT 上的纹波电压也随之增加
FB
SW
L1
C2R1
R2
BST
VCC
C3
C4
D1V OUT
RON/SD
VIN
Input Voltage
C1
RTN
SGND
R ON
R3
Ripple here must be
>25 mVp-p
Ripple here is greater than that at FB by the ratio of
(R1+R2)/R2.
LM2695
初始配置瞬态响应
输出电压
LM2695 初始电流
V IN = 12V, V
OUT
= 10V
负载瞬态响应
400 mA
100 mA 50 mV
利用1 个电容器减低纹波!
增设C5 将使FB 上的纹波与V OUT 上的纹波相同,而无需借助R1 和R2 的衰减作用。
这可以降低纹波,但不会消除纹波
中间纹波配置
FB
SW
L1
C2
R1
R2BST
VCC
C3
C4
D1
V OUT
RON/SD
VIN
Input Voltage
C1
RTN
SGND
R ON
R3Ripple here must be
>25 mVp-p
Ripple here can now be a minimum of 25 mVp-p - same
as at FB.
C5
LM2695
增设一个电容器时的COT 瞬态响应
LM2695 中间纹波配置V IN = 12V, V OUT = 10V
400 mA 100 mA
输出电压
20 mV
负载瞬态响应
如何实现最小的纹波?
LM2695
最小纹波电路瞬态响应
LM2695 最小纹波配置
V IN = 12V, V OUT = 10V
负载瞬态响应
输出电压
400 mA
100 mA
10 mV
最好了解一下:
如果去掉R3 会发生什么?
FB SW
L1C2
R1R2
BST C4D1V OUT
SGND Ripple here must be >25 mVp-p
在它应该上升的时候却走
低!!
电路的调节性能很差,并产生大量的噪声和抖动!!t ON t OFF SW 引脚V OUT V SW
V
OUT 纹波
优选的波形
最好知道:
不要安放过大的输出电容!
LM2695FB SW
L1
C2
R1R2
BST
VCC
C3
C4
D1V OUT
RON/SD VIN C1RTN SGND R ON R3
负载
PC 板周围的分布式电容
V IN
其他需要牢记的事项
•续流二极管应该是一个肖特基二极管,而不是一个超快速二极管!
•必须在V IN 引脚的近旁布设一个0.1 μF 陶瓷片式电容器!
•必须谨慎地排布PC 板走线!
使环路的物理尺寸保持小巧以最大限度地抑制辐射EMI 。
谢谢!。