铺管船用张紧器张紧系统分析
S型铺管船张紧器控制系统仿真试验台设计

S型铺管船张紧器控制系统仿真试验台设计李明婕;段梦兰;李慧;张玉来;吕博;叶茂;董朋光【摘要】Based on the working process and working environment of 2 000 kN tensioner,design and analysis of monitoring and control system are carried out.A set of semi-physical simulation device founded by a motor simulator and a control simulation system is built to simulate the waves as well as the constant tension controlling system.These research results would lay the founda-tion of further studies on mechatronic system of tensioner.This will improve the level of industri-alization for the tensioner for deep water pipelaying vessel.%以2000 kN张力的深水铺管船用张紧器为研究对象,结合其工作环境设计了张紧器的驱动系统和监控系统。
研制了张紧器控制系统的半实物仿真试验台,由电机试验台和电控系统试验台2部分组成,模拟波浪作用和电机的恒张力控制。
为深入研究张紧器的电控系统奠定了基础,可促进深水铺管船用张紧器的产业化。
【期刊名称】《石油矿场机械》【年(卷),期】2014(000)004【总页数】5页(P33-36,37)【关键词】铺管船;张紧器;控制系统;模拟试验【作者】李明婕;段梦兰;李慧;张玉来;吕博;叶茂;董朋光【作者单位】中国石油大学北京海洋油气研究中心,北京 102249;中国石油大学北京海洋油气研究中心,北京 102249;枣庄科技职业学院,山东枣庄 277500;中石化石油勘探开发研究院,北京100083;长江大学,湖北荆州 434023;中国石油大学北京海洋油气研究中心,北京 102249;胜利油田胜利动力机械集团有限公司,山东东营257032【正文语种】中文【中图分类】TE952在全球,海洋石油资源量占石油资源总量的34%[1]。
极浅水域大管径海管铺设管线抖动原因及张紧器模式选择分析
极浅水域大管径海管铺设管线抖动原因及张紧器模式选择分析摘要】在极浅水域采用S-lay铺管方式铺设大管径、高刚度的管道时,正确选择张紧器控制方式至关重要。
保持管线和管线上张力稳定是铺管作业安全顺利的前提。
本文对一次在极浅水域进行大管径海管铺设时出现的管线异常抖动的原因进行了排查分析,对张紧器恒张力控制模式和自动扭矩控制模式在极浅水域铺设大管径海管的适用性进行了研究。
【关键词】抖动、自动恒张力模式、自动扭矩模式1背景介绍烟台打捞局“德合”轮是一艘同时具备5000吨起重能力和3000米水深S-lay铺管能力的起重铺管船。
该船配备了DP3动力定位系统和十点锚泊定位系统,可在各种海域精准定位,进行起重和铺管作业。
2020年1月,“德合”轮在水深12米的极浅海域采用锚泊定位的方式铺设32英寸的海管(海管管线刚度为620吨/米)时,海管出现了连续抖动的异常情况。
根据现场CCTV视频记录显示,管线在张紧器夹持下前后抖动,幅度为10-20cm,周期约为2.2秒,共抖动9-10个周期,总持续时间为25-30秒。
在开始抖动后的13秒,张紧器操作员将张紧器的增益值由0.25降低到0.05,管线抖动随即改善并停止,张紧器张力稳定在167吨。
抖动发生时张紧器工作在自动恒张力模式下,张力设定值167吨。
张紧器增益为0.25,Dead Band功能未激活。
2 管线抖动时管线张力数据重构管线异常抖动事件发生后,铺管作业被暂停。
为保证铺管作业的安全,管线异常抖动的原因需要查明。
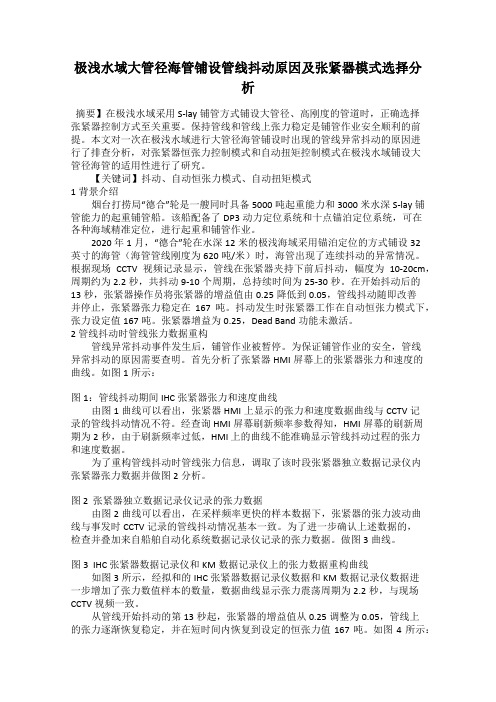
首先分析了张紧器HMI屏幕上的张紧器张力和速度的曲线。
如图1所示:图1:管线抖动期间IHC张紧器张力和速度曲线由图1曲线可以看出,张紧器HMI上显示的张力和速度数据曲线与CCTV记录的管线抖动情况不符。
经查询HMI屏幕刷新频率参数得知,HMI屏幕的刷新周期为2秒,由于刷新频率过低,HMI 上的曲线不能准确显示管线抖动过程的张力和速度数据。
为了重构管线抖动时管线张力信息,调取了该时段张紧器独立数据记录仪内张紧器张力数据并做图2分析。
5000t起重铺管船铺管作业张紧力分析
168
YAN JIU
核,以保持一定的应变余量,为动态分析留出余地。
铺管过程中作用在管道上的外部荷载主要有弯矩、外压和轴力,应满足DNV1981公式:
其中:N 为轴向力;A 为管道截面积;M 为弯矩;为环向应力;为使用系数,在计算过程中上弯段值取0.85,下弯段值取0.72;为最小屈服强度。
二、计算模型
5000T 起重铺管船作业采用的是S-LAY 铺设方法。
S-LAY 铺管法是管道在托管架的支撑下,自然地弯曲成“S”形曲线,一般可分成两个区域:一为上弯段,一般是从铺管船甲板上的张紧装置开始,沿托管架向下延伸到
管道开始脱离托管架支撑的抬升点为止的一段区域;另一段为下弯段,是从拐点到海床着地点的一段区域。
管道在下弯段的曲率通过沿生产线放置的张紧器来控制,管道在上弯段的曲率和弯曲应力则一般依靠合适的支撑和托管架的曲率来控制。
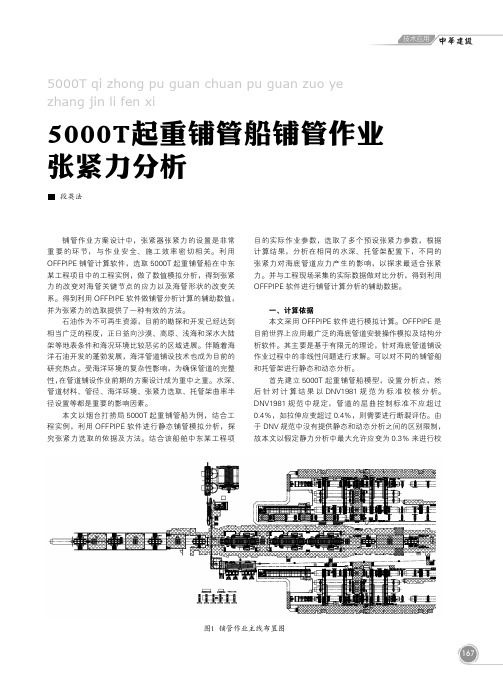
1.5000T 起重铺管船铺管线布置
本文采取该起重铺管船中东某工程项目中作业站设置及托管架曲率设置为计算模型。
其主甲板铺管作业主线布置如图1所示。
计算选取张紧器前两个支撑滚轮为起点,以船艉部为原点,主甲板上共选取6个支撑滚轮和3台张紧器作为计算模型。
2.托管架配置参数
该船托管架为三段铰接形式,实际工程项目中,综合水深等因素选取第一、二两节托管架组合的形式进行作业。
托管架模型如图2所示。
托管架上布置10个滚轮支撑管
图2 一、二节托管架模型
图3 海管铺设形状及应力分布图
YAN JIU
图4 实测数据与数值模拟结果误差对比。
铺管船用张紧器液压系统的设计与仿真的开题报告

铺管船用张紧器液压系统的设计与仿真的开题报告一、研究背景及意义铺管船是一种专门用于海洋油气勘探和开发的船舶。
在海洋中铺设管线是油气资源输送的主要手段之一。
而铺管船则是铺设海底管线的主要工具之一。
在铺设管线的过程中,极其依赖于多种设备和系统,其中张紧器液压系统是极其重要的一个。
张紧器液压系统可以对管线进行张紧,在海浪、海流等环境因素的影响下可以保证管道的保持平稳,从而保证送气、输油等的正常运行。
因此,铺管船用张紧器液压系统的设计和仿真研究对于保证海底管线铺设的成功及后续油气勘探生产的正常进行具有重要意义。
二、研究内容及方法本文主要研究铺管船用张紧器液压系统的设计和仿真。
研究内容包括以下方面:1.铺管船用张紧器液压系统的设计,包括系统的主要组成部分和结构、系统的参数设计和计算等。
2.使用ANSYS等仿真软件,对铺管船用张紧器液压系统进行仿真计算,并对仿真结果进行分析和验证。
3.对仿真结果进行评估和优化,优化铺管船用张紧器液压系统设计的参数和结构,提高系统的稳定性和可靠性。
研究方法主要包括:1.研究文献资料法:对铺管船用张紧器液压系统的相关文献进行调研、分析和总结,对系统的设计和仿真方法进行研究。
2.计算机辅助设计法:使用CAD等设计软件,对铺管船用张紧器液压系统进行设计,进行系统参数的计算和分析。
3.仿真技术和数据分析法:利用ANSYS等仿真软件,对系统进行仿真计算,并对仿真数据进行分析和优化。
三、预期成果和意义预期成果包括:1.铺管船用张紧器液压系统的设计方案和计算、仿真过程设计。
2.针对张紧器液压系统的仿真计算,在不同条件下进行仿真,分析仿真结果,并进行优化。
3.优化的张紧器液压系统设计方案,该方案参数能保证系统在不同海况下稳定性高、可靠性强。
预期意义包括:1.对铺管船用张紧器液压系统的设计和仿真进行研究,为保证海底管线铺设成功以及后续油气勘探生产的正常进行提供了理论依据和技术支持。
2.优化铺管船用张紧器液压系统的设计和参数,提高系统的稳定性和可靠性,可以降低铺设管线的成本和提高铺设效率。
毕业设计

2.张紧器结构、性能参数
• 张紧力:2750kN; • 铺管最大速度:40m/min; • 收管速度:20m/min; • 框架的外形尺寸(长×宽×高):6.0m×3.5m×7.5m; • 张紧器驱动链轮:直径868.55mm,齿数25,链节距216mm; • 上、下履带链轮中心距:14m; • 上履带提升高度(采用液压机构举升和压紧上履带):2.5m; • 减速器驱动形式:行星齿轮减速机够; • 驱动动力:电动马达。
2.张紧器驱动电动机控制原理
(1)恒功率调速 在上履带夹紧管道后,电动 机开始工作,上位机PAC实时对比实际张紧力 与设定初始值的差值,通过现场总线发送指 令给变频器,变频器调节电动机速度,直到差 值在允许的范围内。 (2)恒转矩调速 实际测量到张紧器张力达 到要求后,提高转速,以提高铺管速度,这一 过程同样需要实时监视张紧力,张紧力达到 要求后立即转入恒功率调速。
2.履带机构
履带机构由若干链轨节组成,链轨节之间用紧锁销轴和销套连接。 每个链轨节外侧连接有V形履带板,履带板上安装有橡胶缓冲垫块, 用于加大摩擦力和使载荷均匀,进而加大与管外壁的接触面积,降低 接触比压。
3.驱动系统
电动马达提供的驱动力通过行星齿轮减速器驱动链轮,链轮驱动履 带完成铺管作业时对管子的收放动作。
4.支架和底座
支架支撑上、下履带系统,并为上履带系统的运动提供滑道。底座 直接焊接在甲板上,张紧器可以在底座上滑动,这样可以通过测力传 感器测量管线的张力,为张紧器的控制提供依据
5.张力传感系统
电子测力传感器安装在张紧器和底座之间,用以测量管线张力。
张紧器控制系统总体方案设计
• 根据张紧器系统工作原理的要求确定控制系统,包括液压系统和驱 动电动机系统。
海洋铺管船用张紧器履带机构运动学分析
3 结 论
1 ) 采 用 有 限元 方 法 对 F HZ 4 8 — 7 0型 环 形 防 喷
参 考文献 :
器 壳 体和 顶盖 进 行 了分 析 。结果 表 明 : 设 计 的壳 体
和顶 盖 强度符 合 AP I 1 6 A和 AS ME Ⅷ 第 二册规 范
的要 求 。
E l l 程
3 . CNPC Bo h a i Eq u i pme n t Ma n u fa c t u r i n g Gr o u p Co . , Lt d. , Ti a n j i n 3 0 0 2 8 0 , Ch i n a )
表 4 截 面 主 膜 应 力
截 面
作者简介 : 孙 亮( 1 9 7 6 一 ) , 男, 黑龙江宾县人 , 硕士 , 主要 从 事 海 洋 铺 管 船 用 张 紧 器 国产 化 技 术 和 长 输 管 道 自动 焊 工 艺 及 装备研究 。
E 3 ] 晏祥慧 , 齐 明侠 , 陶 云 . 双 闸板 防 喷 器 壳 体 非 线 性 有
2 ) 防喷 器顺 利 完 成 了厂 内的各 项 试 验 , 即静 水压 强度 试验 、 密 封试 验和疲 劳试 验 等 , 且 符合规 范
要求 。
限元分析[ J ] . 石油矿场机械 , 2 0 0 6 , 3 5 ( 6 ) : 3 0 — 3 2 . [ - 4 3 A P I S p e c i f i c a t i o n 1 6 A, S p e c i f i c a t i o n f o r D r i l l — Th r o u g h E q u i p me n t [ S ] . 2 0 0 4 .
2 . Co l l e g e o f Me c h a n i c a l a n d El e c t r o n i c En g i n e e r i n g, C h i n a Un i v e r s i t y o f Pe t r o l e u m, Be i j i n g 1 0 2 2 4 9, C h i n a;
海洋铺管船用张紧器的总体设计

张紧器总体结构包括压紧机构 、履带机构 、驱 动系统 、支架和底座 、张力传感系统等 5部分 , 下 面分别介绍这 5部分的设计方案 。
11 压紧机构 压紧机构通过履带总成向管子提供正压力 , 是 决定张紧力大小的关键部分 , 它通过垂直对称布置 的 4个液压缸将管子夹持在 2个履带中间 。结构原 理简图如图 1所示 。 21履带机构 履带机构由若干链轨节组成 , 链轨节之间用紧 锁销轴和销套连接 。每个链轨节外侧连接有 V 形 履带板 , 履带板上安装有橡胶缓冲垫块 , 用于加大
图 3 电动机控制原理框图
(1) 恒功率调速 在上履带夹紧管道后 , 电 动机开始工作 , 上位机 PAC 实时对比实际张紧力 与设定初始值的差值 , 通过现场总线发送指令给变 频器 , 变频器调节电动机速度 , 直到差值在允许的 范围内 。
(2) 恒转矩调速 实际测量到张紧器张力达 到要求后 , 提高转速 , 以提高铺管速度 , 这一过程 同样需要实时监视张紧力 , 张紧力达到要求后立即 转入恒功率调速 。
张紧器部分零部件的三维设计图
损 。因此 , 除了要求履带有良好的结构外 , 还要求 它有足够的强度 、刚度和耐磨性 , 但质量还应尽可 能轻 [ 4 ] 。每 条 履 带 总 成 由 履 带 板 、链 轨 节 (左 、 右 ) 、密封圈 、履带销轴和轴套等组成 , 图 6 为履 带部件的三维设计图 。
摘要 为了提高我国海洋管道铺设能力 , 特别是深海管道铺设能力 , 在简要介绍国内外铺管 船用张紧器的应用情况之后 , 对海洋铺管船用张紧器进行了国产化研究 。经反复研究和论证 , 确 定了海洋铺管船用张紧器的基本参数 、总体结构方案和总体控制系统方案 。最后给出了张紧器部 分零部件的三维设计图 。
海洋铺管船用张紧器整体吊装可靠性分析

p r teh i t r rieT ninr nteo e a d I epoeso c i n eMaie Tn oth os o i e a Ma n e s e t r n . nt rcs fl a z gt r n e 一{ tf n g l o o h h h h ol i h
( ol eo E etcl n c aia E gn eig C iaU ies yo P t lu B in 0 2 9 C ia l g f l r a a dMeh nc l n ier , hn nvri f e oem, e ig1 2 4 , hn ) C e ci n t r j
S S oW et tlt a r sptn agr s etni t r e ii a zd n Y f a ,h a ieh m ise oad ne u sco e o s oh sn al e d; Str e c e n ts s d r o i nh p c sf o tgn y a
LIBa — o g , o z n GUO —p n ZHANG a W ANG a — e Zhi i g , Ch o , Li n l i,ZHANG h - n S i mi
( o e e f c a i l n ier g In r n o aU i ri f eh ooy H h o 1 0 1 C ia l g Meh nc gn ei , e gl nv syo T c n lg , o h t 0 5 , hn ) C l o aE n n Mo i e t 0
李 宝宗 郭 志平 ’ 张 超 王连磊 张士 民 ( 内蒙古 工业大学 机 械学 院 , 呼和浩特 0 0 5 )( 10 1 中国石油 大学 ( 京 )机 电工程学 院 , 北 北京 1 2 4 ) 0 2 9
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
!技术讨论#铺管船用张紧器张紧系统分析3张俊亮1 王晓波2 林 立1 赵东岩2 钟朝延2(11中国石油大学(北京) 21海洋石油工程股份有限公司) 摘要 铺管船用张紧器是海洋铺管船的关键设备,张紧器张紧系统是张紧器保持管线恒张力的保证。
介绍了国内外铺管船用张紧器张紧系统现状,并加以分析,指出铺管船用张紧器张紧方式为在浅海采用螺旋夹紧、马达驱动,在深海采用液压缸夹紧、交流伺服电动机驱动。
通过仿真,液压夹紧缸在快进、工进、保压、快退阶段均能达到系统要求;交流伺服电动机通过恒转矩的输出,在液压缸夹紧的前提下,对管线进行恒张力控制。
分析结果表明,液压夹紧系统和电动机驱动系统满足系统的工作需要,系统稳定可靠。
关键词 铺管船 张紧器 张紧系统 夹紧 驱动 仿真引 言随着科学技术的进步和人类对海洋石油资源认知水平的不断提高,海洋石油天然气开发已成为世界石油工业的热点和科技创新的前沿。
海洋管道是最重要的海洋石油天然气运输渠道,海洋铺管设备也随着海洋油气开发的深入不断发展。
铺管船用张紧器是铺管的关键设备,张紧力的大小对管线铺设深度有直接影响,张紧器张紧系统实现管线恒张力控制。
在铺设过程中,管道受自重、浪、流的影响,承受较大的弯曲应力,且弯曲应力不断变化。
为了使管道弯曲应力小于材料的屈服极限,确保管道不被破坏,用张紧器进行送管并实时调整管道的张紧力,使管道的张力基本恒定不变,始终保持在允许的范围内[1]。
随着海洋勘探开发从浅海走向深海,铺管深度从150m到3000m[2],张紧器张紧系统中夹紧方式也由最初的半自动刚性夹紧发展为全自动柔性夹紧。
国内外张紧器张紧系统状况目前,我国拥有4台铺管船用张紧器:从美国进口3台,自主研发1台。
3台进口张紧器分别配套在滨海106号、109号和蓝疆号铺管船上。
其中,蓝疆号铺管船配套的张紧器最为先进,单台最大张紧力为7101982kN(7215tf),采用螺旋压紧装置夹紧管线,液压马达实现管线的输送。
张紧系统主要由上下2套履带驱动机构组成。
上履带驱动机构安装在上部可升降的动框架上,动框架由电动机驱动的4个螺旋压紧装置使其上下运动;下履带驱动机构安装在下部固定框架上,电动机驱动4个螺旋压紧装置,提升动框架和上履带板,把管线穿入上下履带板中间后,再反向旋转螺杆,使动框架带动上履带板等部件下降压紧在管线上。
在铺管过程中,2台液压马达被驱动,产生所需要的扭矩,带动夹持着管线的履带板运动。
国内早在1996年就确立了“滩海铺管船用张紧器”的研究课题,并进行了陆上整机模拟试验。
1998年在胜利滩海油田进行了样机工业试验,性能基本满足需要,各部分运行正常[1],最大张紧力为147110kN(15 tf)。
该样机采用的张紧方式与蓝疆号铺管船用张紧器基本相同,区别在于国产样机采取手动旋转螺旋压紧装置夹紧管线,而蓝疆号采取电动机驱动螺旋压紧装置。
相对国内而言,国外对铺管船用张紧器的研究开始时间比较早,如意大利RE MACUT公司有50多年的生产经验;美国W ESTECH公司早在30年—761—2008年 第36卷 第9期石 油 机 械CH I N A PETROLEUM MACH I N ERY3基金项目:国家863项目“深水海底管道铺设技术”(2006AA09A105)。
前就开始研究生产;荷兰S AS公司从1968年开始生产。
这些公司在张紧器生产方面技术成熟,有丰富的设计、制造经验,张紧器最大张紧力的大小可根据用户要求进行设计,各公司张紧器的张紧系统各有不同,RE MACUT公司的张紧器张紧系统多采用螺旋夹紧、电动机驱动的方式[3]。
S AS公司自1969年以来销售近100台(套)张紧器,所采取的张紧系统与最大张紧力有关,最大张紧力小于490133k N的张紧器张紧系统多采用螺旋夹紧、液压马达驱动;最大张紧力大于490133kN(50tf)的张紧器多采用液压缸夹紧、交流电动机驱动的形式[4]。
液压缸夹紧、交流电动机驱动的工作过程为:液压缸通过上履带将管线夹紧在下履带上,监控系统实时监测管线受到的夹紧力,当夹紧力满足要求时,液压缸进油口关闭,液压泵站停止运行,液压缸保持稳定压力。
管时,监控系统通过安装在驱动轴上的编码器监测铺管速度,并控制驱动电动机按照要求的铺管速度运行,当船上升时,驱动电动机加速送管;当船下降时,驱动电动机减速送管,使张紧力时刻保持在设定值范围内。
张紧器结构及工作过程张紧器机械结构示意图如图1所示,由上、下履带和机架构成,上履带可沿导杆上下运动,下履图1 张紧器机械结构示意图1、5—夹紧装置;2、4—导向杆;3—机架;6、8—驱动轴;7—管;9—履带总成带驱动机构固定在机架上。
张紧系统由管线夹紧系统、管线输送系统组成。
在铺管过程中,夹紧系统通过上履带将管线压紧在下履带上,保持恒定的夹紧力。
管线从铺管船船尾下水时,从船尾到海底有一段比较长的悬空段,由于铺管船受风、浪、潮的影响上下垂荡,管线从船尾到海底之间的距离不断变化,这就使得悬空管段的长度与管线应力也随着变化。
如果将管线固定在船上,当船上升时,管线将承受很大的拉力,这个拉力可能使管线超过应力极限,造成破坏或使铺管船定锚走锚造成事故;当船下降或将管线自由放在船上时,管线受自身重力和波流力的作用,将承受很大弯曲应力,该应力将超过管线材料的屈服极限,从而使管线产生塑性变形[3]。
张紧系统可实现管线的恒张力控制。
铺管时,监测系统通过安装在驱动轴上的编码器和张紧器与船甲板之间的传感器实时监测铺管速度和管线张紧力。
当铺管船平稳地铺管时,管线输送系统使铺管速度在设定的范围内。
当船上升时,管线输送系统加速放管;当船下降时,减慢放管速度,确保张紧力在一定的范围内。
张紧器张紧系统分析张紧器张紧系统的主要作用是保证管线的恒张力控制,在此基础上,全面考虑系统结构、操作、能耗等因素。
通过分析国内外张紧系统的组成,可将张紧方式归纳为螺旋夹紧和液压马达驱动、螺旋夹紧和电动机驱动、液压缸夹紧和电动机驱动3种。
11螺旋夹紧和液压马达驱动这种夹紧装置简单,操作者启动电动机带动丝杠旋转,使上履带上下运动。
但夹紧过程必须在现场人工调节,属于刚性夹紧,自适应能力差。
且在铺管过程中,管线由于水泥涂层厚度不均等各种原因,会造成管线直径尺寸有波动,管径的变化会影响夹紧力,从而影响张紧力大小。
液压马达的调速方便,成本低。
但无论是在马达驱动管线铺设还是马达停止运转管线焊接过程中,液压泵站一直处于工作状态,造成能源浪费。
21螺旋夹紧和电动机驱动这种张紧方式用电动机代替液压马达驱动,不需要液压泵站,整体张紧系统简单。
电动机驱动有2种方式:直流电动机和交流伺服电动机驱动。
随着控制技术和交流电动机技术的发展,采用变频控制的交流伺服电动机相对于直流电动机的启动更快更平滑、控制方式可靠、防护等级更高,在管线焊接过程中,电动机停止运行,系统能耗较低。
所以,近几年普遍采取交流伺服电动机驱动,但变频器2电动机的控制系统成本较高。
31液压缸夹紧和电动机驱动液压夹紧缸属于柔性夹紧,监控系统实时监测夹紧力大小。
当夹紧力达到设定值时,液压缸进油—861— 石 油 机 械2008年 第36卷 第9期口断路,液压缸保压,液压系统的蓄能器平衡液压缸因泄漏引起的压力变化,液压泵站停止工作;当监测到夹紧力小于设定值时,监控系统会自动启动液压泵站,直至夹紧力满足要求。
所以夹紧过程是闭环控制,不仅自适应能力强,而且节约能源。
由以上3种张紧方式的分析可以看出,螺旋夹紧装置简单、操作方便,但稳定性差;液压缸夹紧稳定可靠,但控制系统复杂;马达驱动控制简单,而能耗高;电动机驱动控制方式灵活,可是成本较高。
所以,要针对不同任务的张紧器选择不同的张紧系统。
滩海铺管船用张紧器要求最大张紧力小,铺管过程受风浪影响相对深海要小,一般采用螺旋夹紧和马达驱动的张紧形式。
而对于铺管深度3 000m的深水铺管张紧器而言,最大张紧力大、在铺管过程中受海浪影响大,要求夹紧系统稳定、驱动系统运行可靠,所以采用液压缸夹紧和交流伺服电动机驱动的张紧方式。
张紧器张紧系统仿真分析对液压夹紧系统和驱动系统分别进行仿真分析,仿真结果如图2、图3所示。
图2 液压夹紧系统仿真结果在快进阶段,液压缸在调速阀和变量泵的共同作用下,驱动上履带以一定的速度向下运动,当运动到一定位置后减速(图2a);工进阶段,液压缸继续驱动上履带向下运动,接触到管线后减速运动,当监测到的张紧力达到系统要求时,液压缸停止运行(图2b);保压阶段,变量泵停止工作,液压缸进油口关闭,液压缸在蓄能器的作用下保持夹紧力;图2c表示在有无蓄能器作用下,夹紧力的大小变化。
从图2中可以看出,利用蓄能器的保压作用可在一定时间内使夹紧力维持在允许范围内;快退阶段,通过调节变量泵的流量可以改变液压缸上行速度(图2d)。
通过分析,张紧器的夹紧系统在工作的各个阶段,都有较好的稳定性,特别是保压阶段,利用蓄能器的油压补充功能,补充液压缸因泄漏引起的压降,使系统长时间保持稳定的压力。
驱动系统通过电动机控制铺管速度的变化,使管线所受张力保持基本恒定,如图3a所示。
虽然电动机输出转矩在开始阶段有一定的波动,但通过调整电动机转速使电动机很快进入恒定转矩输出阶段,如图3b所示。
图3 管线恒张力仿真曲线(下转第178页)—961—2008年 第36卷 第9期张俊亮等:铺管船用张紧器张紧系统分析 与空气中的氧隔离,将化学降解降低到最低程度;由于采用壳牌公司的管理模式,现场不允许聚合物干粉及溶液有任何泄露,特别是有毒、有害化学药剂;对工艺流程中所有设备及输送介质进行全方位监测,如设备温度、压力、排量、润滑油温度、工作状态、故障点、故障原因、介质温度、粘度、pH值等。
针对以上工艺技术要求,新世纪机械制造有限公司做了深入的调研、设计和厂内试验,完成了总体方案设计,通过了甲方严格审查和认可。
方案设计如下:(1)采用氮气封闭工艺,将聚合物干粉、溶液进行全程封闭,隔绝与空气中氧的接触,减小化学降解。
(2)在泵的入口及出口安装压力开关,确保泵压和管线压力不超压,实现安全运转。
(3)在工艺管线的关键位置安装气动紧急关断阀,当事故发生时防止化学药剂外泄。
(4)在工艺流程中适当位置安装在线粘度计、温度计和pH计,随时监测溶液的物理化学性质。
(5)工艺控制系统采用世界上最先进的现场总线控制系统,现场仪表、传感器及气动或电动阀采用现场总线型,更加全面地检测分析和精确控制现场设备的运行状态。
通过以上研究与试验,使国内三次采油地面工艺设备的技术水平与国际接轨,进一步提高了工艺技术指标的保障能力,为开拓国际市场奠定了坚实基础。
结 论(1)三次采油地面工艺设备经过多年的摸索和改进,特别是橇装配注站的研制成功和不断完善,工艺性能指标的保障能力得到了长足进步,达到了国际先进水平,为各油田通过三次采油工艺提高采收率提供了可靠保障。