基于VISSIM微观交通仿真软件的导流岛机非冲突元胞自动机模型
基于VISSIM_的城市环岛导识研究——以大连市学苑广场为例

012023.07 / Intelligent Technology and Architectural Design 智能技术与建筑设计peak hours. In order to alleviate this problem and to improve trafficefficiency, an optimization method of increasing ground guidance is proposed. VISSIM simulation evaluation is conducted for the ground guided and unguided states of the roundabout of Xueyuan Square respectively. Using average vehicle operation delay time, average vehicle parking delay time, average vehicle parking times, and queue length as evaluation indicators, the traffic conditions with and without ground guidance during early peak hours are analyzed and compared. The evaluation results show that ground guidance can effectively reduce conflict points, make the traffic flow of the roundabout more orderly, and improve vehicle operation efficiency Key words VISSIM; ground guide; roundabout; interlaced flow area; guided traffic环形交通一直是我国早期交通设计中常采用的形式,环岛式组织形式在一定的交通量下可以提高通行效率,但随着城市经济发展,车辆保有量持续增长,现有的环形交通组织方式已经无法满足交通需求[1]。
基于PFV策略的连续型元胞自动机交通流模型
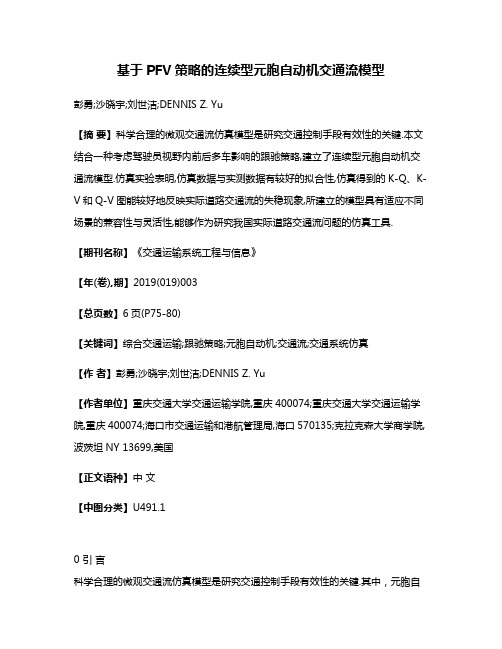
基于PFV策略的连续型元胞自动机交通流模型彭勇;沙晓宇;刘世洁;DENNIS Z. Yu【摘要】科学合理的微观交通流仿真模型是研究交通控制手段有效性的关键.本文结合一种考虑驾驶员视野内前后多车影响的跟驰策略,建立了连续型元胞自动机交通流模型.仿真实验表明,仿真数据与实测数据有较好的拟合性,仿真得到的K-Q、K-V和Q-V图能较好地反映实际道路交通流的失稳现象,所建立的模型具有适应不同场景的兼容性与灵活性,能够作为研究我国实际道路交通流问题的仿真工具.【期刊名称】《交通运输系统工程与信息》【年(卷),期】2019(019)003【总页数】6页(P75-80)【关键词】综合交通运输;跟驰策略;元胞自动机;交通流;交通系统仿真【作者】彭勇;沙晓宇;刘世洁;DENNIS Z. Yu【作者单位】重庆交通大学交通运输学院,重庆400074;重庆交通大学交通运输学院,重庆400074;海口市交通运输和港航管理局,海口570135;克拉克森大学商学院,波茨坦NY 13699,美国【正文语种】中文【中图分类】U491.10 引言科学合理的微观交通流仿真模型是研究交通控制手段有效性的关键.其中,元胞自动机可以将复杂的交通流行为转化为简单、易于理解的元胞状态演化过程,受到较多学者关注.传统的元胞自动机[1]交通流模型以道路片段为元胞,在整个仿真过程中使车辆状态在空间上发生跳跃性变化,若想体现更多交通流演变细节则需要细化道路片段,但这无疑是以牺牲计算机计算效率为代价的.面对传统元胞自动机的不足,近年来,学者们开始致力于传统元胞自动机的改进研究.Fei Yan[2]提出了一种快速连续松弛的更新方法来减少元胞更新耗时;Xin Ruan[3]提出了一种改进的具有轴信息的元胞自动机交通流模型应用于桥梁的基础设施的交通荷载模拟;Junfang Tian[4]提出了一种双状态安全速度的元胞自动机交通流模型,使其可以模拟交通流振荡的时空模式、相变和凹增长模式.Xiao Feng[5]等提出了一种基于三相理论的元胞自动机模型研究影响驾驶员速度选择的影响因素.Carlos Canudas-de-Wita[6]将道路片段细分并设置为多状态的可变长度的元胞进行交通流模拟.以上研究虽然在一定程度上对传统元胞自动机进行了不同程度的改进,但仍然无法克服传统元胞自动机模型的局限性,即时间和空间上的离散.国外学者Öznur Yeldan[7]在注意到这点之后,于2012年首次提出了一种基于连续元胞自动机的高速公路随机交通流模型,它的出现很好地克服了传统元胞自动机的不足.相较于传统元胞自动机,连续型元胞自动机不再是以道路片段为元胞,而是将道路上的车辆作为元胞,能够描述车辆速度、加速度、位移的连续性变化,从而使得连续型元胞自动机模型能够展示更丰富的交通流演变细节.但是单纯的理论研究并不能充分体现实际道路情况,因此我们应该着眼于通过实际数据解决道路问题来验证模型的合理性.可以说连续型元胞自动机为准确描述交通流行为创造了条件,但要想实现交通流行为的准确描述,还需要在连续元胞自动机建模中充分考虑实际道路情况下的车辆跟驰策略.由于这是一个较新的研究领域,目前关于连续型元胞自动的研究在文献中很少,因此本文决定在ÖznurYeldan思路的基础上,尝试结合一种考虑实际道路驾驶习惯的车辆跟驰策略[8](Preceding and Following Vehicles,PFV),建立一种符合连续元胞自动机交通流模型,并根据实测数据验证模型的合理性,为研究我国实际道路交通流问题提供一种方法借鉴.1 PFV策略已有跟驰策略只是从目标车辆的前车或者后车出发考虑其对跟驰行为的影响,但是根据实际道路车辆行驶经验,驾驶员会通过视野观察前后多车辆的行驶状态来调整自己的驾驶行为,文献[8]考虑了这一情况,建立PFV策略,即式中:V(∙)是关于车头间距Δxn-1、Δxn和Δxn+1的最优速度函数;Δt为时间间隔;α、β、φ、σ、μ1、μ2为待标定参数.本文采用遗传算法作为主要的标定方法,数据调查选择重庆市南岸区的主干道——学府大道某一段为实验路段.为了避免交通信号灯的影响,选取路段上远离上下游信号灯的横断面,对超过4辆小汽车跟驰的车队进行了速度和车间距的数据采集,并对其进行了分析处理.通过对采集到的数据进行筛选,剔除不合理的数据,最终得到了84组实验数据.利用实测数据,采用遗传算法对式(1)进行参数标定.参考已有研究文献,确定式(1)参数取值范围为:α ∈[0,2];β ∈[0,0.5];φ,σ,μ1,μ2 ∈[0,1].遗传算法优化的目标函数Fobj设为式中:a*i为改进模型产生的加速度;ai为真实加速度;i为样本数据编号,i=1,2,…,N.由于遗传算法为较成熟的经典算法,因此,不再对此计算流程进行详细阐述.遗传算法的配置情况为:种群规模为60,交叉概率为0.9,变异概率为0.2,迭代次数为500 次.式(1)参数标定结果为:α=0.520;β=0.246;φ=0.013;σ=0.040;μ1=0.259;μ2=0.032.2 基于PFV策略的一维连续型元胞自动机模型假设跟驰车队行驶在1条单车道上,将道路上的车辆视为元胞,将车辆的运动看作为元胞的运动,因此每个元胞长度就等于车辆长度,即Δx=5 m(标准小汽车),车道长度L设置为标准小汽车长度的整数倍,则道路所能承载的最大车辆数Nmax=L/Δx.参考实际道路车辆加速情况,设置车辆的加速度范围为α ∈[-3,3] m/s2.采取开放边界条件,驶出仿真路段的车辆剔除出跟驰车队,按进车概率产生车辆进入仿真路段.仿真路段上的车辆按行驶规则进行速度和位置更新.Step 1 初始状态.设置道路长度L=5 000 m,道路上初始车辆数NS=50.初始状态时,车辆的位置xn(0)(道路起点到车辆车头的距离)按照每辆车在道路上获得的相同距离的活动区域,随机将其分布在活动区域内,即初始状态时车辆速度为为了符合实际道路行驶情况且设置合理的避免碰撞的初始速度vn(0),本文设置最大车速vmax=22 m/s,最小车速vmin=9 m/s,同时车辆速度还受安全距离的限制,即,dn是第n辆车同前车第n+1辆车的车间距,dn=xn+1(0)-xn(0)-Δx,n=1,2,…,NS.Step 2 速度更新.式中:vn(t+1)、vn(t)分别是车辆n在时刻t+1和t时的速度;an是根据式(1)计算得到的车辆n在t时刻的加速度;randn(1)为随机生成的满足标准正态分布的随机数,旨在让整个系统的速度变化更符合实际道路交通情况.Step 3 车辆产生.式中:rand(1)为产生0~1 之间的随机数;p为产生车辆的概率,设为p=0.7;x1(t)为t时刻道路上第1辆车的位置;v1(t)为t时刻第1 辆车的速度;xnew为系统中新产生车辆的位置;vnew为新产生车辆的速度.Step 4 车辆剔除.式中:No为t时刻道路上的车辆数;NE为将已经跑出车道的车辆剔除后的车辆数.在仿真路段长度确定后,车辆按照规则进行位置更新,随着时间推移,总会发生车辆行驶出仿真路段的情况,对行驶出仿真路段的车辆,不再对其进行仿真迭代计算,采用式(9)和式(10)剔除.Step 5 车辆位置更新.3 仿真验证3.1 仿真结果分析设置仿真时间T=2 000 s.为了避免初始状态的干扰,选取最后500 s的仿真数据作为仿真结果.图1是基于PFV 策略的一维连续型元胞自动机模型仿真道路交通流得到的三要素关系.可以看出,所给出的模型仿真得到的密度—流量(K-Q)、密度—速度(K-V)和流量—速度(Q-V)关系基本符合交通流理论;在模拟车辆速度变化是连续的,能够对交通流的细节进行更好的刻画.根据模拟道路设置的条件,阻塞密度同图1(a)仿真得到的阻塞密度值相同;图1(b)通过对散点进行曲线拟合得出平均速度和密度的非线性关系图,可以很好地看出随着密度的增大车辆速度逐渐减少,很好地反映了交通三要素里速度与密度的关系,并且拟合的曲线较为符合实际道路情况;图1(c)通过对散点进行曲线拟合可以较好地反映流量与速度的关系.开始时车速会随着流量的增加而增大,当系统继续不断进车时达到最大流量时系统的平均速度和流量逐渐下降,道路交通状态进入拥堵区.图2为所给出的模型仿真道路前段、中段、尾段的车辆位移时空关系.从图2(a)可以看出,道路前段交通运行流畅,车队可以自由行驶;图2(b)中交通运行出现了较小的波动,对于道路上任何一辆车的速度突变,都会造成系统的波动,甚至形成拥堵点;图2(c)中交通运行形成了稳定的拥堵带,并随着时间推移加深,说明车队在行驶过程中,后面的车辆难以察觉交通状态的突变进而造成拥堵扩大.而通过了拥堵带的车辆又恢复了自由交通流状态,这一状况符合实际道路的拥堵形成和消散的机理.3.2 仿真结果验证由于实际道路交通流密度难以采集获得,因此选用文献[1]中的方法,通过对道路车辆时间占有率的计算得到.对于时间占有率数据的收集遵循以下两点:(1)当实验路段的测试时间区间达到5 min 以上时,道路密度受测试道路区间长度的影响变小;图1 基于PFV 策略的一维连续型元胞自动机仿真交通流三要素关系Fig.1 Three-dimensional diagram of one-dimensional continuous cellular automaton traffic flow based on improved heel strategy(2)当实验路段的测试长度区间大于800 m时,道路密度受测试道路时间区间的长短影响变小.因此,道路的测时区间长度以15 min为区间,选择道路区间1 000 m长度为测试区间.图2 模拟道路车辆位移时空关系Fig.2 Temporal and spatial maps of vehicle displacements simulating different parts of the road对数据进行处理优化后,将所选道路路段的交通流实测数据与仿真结果对比,如图3所示.可以看出,黑色圈点分布在仿真曲线的周围,与仿真曲线拟合程度较好.结果表明,基于PFV 策略的一维连续型元胞自动机模型能够很好地对实验路段的交通流进行仿真模拟.综上所述,基于PFV 策略的连续型一维元胞自动机具有模拟道路交通流的能力,其反映出的交通流三要素关系基本符合交通流原理,同时,模型仿真结果跟实验数据有很好的拟合度.因此,本文所建立的模型能够作为交通流仿真的模型工具.图3 实测数据与仿真结果的对比Fig.3 Fitting map with actual road traffic flow 3.3 灵敏度变化对仿真结果的影响图4是调整PFV策略灵敏度α仿真得到的交通密度—流量关系曲线同实际实验路段交通流的对比图.可以看到:(1)随着灵敏度α的增大,最大流量qm值不断增大,但其增大的幅度在逐渐减小;这说明增加灵敏度的取值大小,道路最大交通流量不会一味地增大,同时还会受到道路通行能力影响,最佳密度km表现为先增大再减小.图4 不同灵敏度密度—流量仿真结果与实测数据关系Fig.4 Density-flow map with different sensitivity and actual road traffic flow fit map(2)仅有当α=0.2时的道路交通流曲线和实际交通流有较大出入,即大部分黑色圈点都位于曲线外围.黑色圈点主要落在α=0.4的交通流曲线的外侧和α=0.6的交通流曲线内侧,说明在该灵敏度取值范围内的模型都是基本符合当前实验道路交通情况的.当灵敏度α=0.8时,采集的交通流数据仍有部分和交通流曲线存在一定拟合程度.这说明在仿真精度要求不高时,本文所给出的模型具有较好地适应不同场景的兼容性.同时,在仿真精度要求较高时,可以仅仅通过调整灵敏度的大小优化本文所提出的模型,使仿真结果更加符合实际应用场景,这也说明本文所给出的模型具有较好地适应不同场景的灵活性.综上所述,通过调整PFV 策略灵敏度的方式来观察其反映的交通K-Q曲线和道路交通流的拟合程度的实验,从侧面说明了所提出的交通流仿真模型具有适应不同场景的兼容性与灵活性.4 结论本文基于一种考虑驾驶员前后视野内双前车及后车的跟驰策略(PFV策略),建立了连续性元胞自动机交通流仿真模型.仿真实验结果表明:本文所提出的交通流仿真模型的模拟结果符合研究路段实际交通流特性;且在仿真精度要求不高时,本文所给出的模型具有较好地适应不同场景的兼容性;在仿真精度要求较高时,可以仅仅通过调整跟驰策略的灵敏度,使得本文所给出的模型能够适应不同研究路段环境差异等所导致的交通流特性差异.因此,本文建立的连续元胞自动机交通流模型可以用来作为研究实际道路交通问题的仿真工具.【相关文献】[1] 贾斌,高自友,李克平.基于元胞自动机的交通系统建模与模拟[M].北京:科学出版社,2007.[JIA B,GAO Z Y,LI K P.Modeling and simulation of traffic system based on cellularautomata[M].Beijing: Science Press,2007.][2] YAN F,PAN P Z,FENG X T,et al.A novel fast overrelaxation updating method for continuousdiscontinuous cellular automaton[J].Applied MathematicalModelling,2019,66(2):156-174.[3] RUAN X,ZHOU J Y,TU H Z,et al.An improved cellular automaton with axis information for microscopic traffic simulation[J].Transportation Research Part C:Emerging Technologies,2017,78(5):63-77.[4] TIAN J F,LI G G,MARTIN T,et al.An improved cellular automaton with axis information for microscopic traffic simulation[J].Transportation Research PartB:Methodological,2016(93):560-575.[5] FENG X,QIAN Y S,ZENG J W.A cellular automata traffic flow model for three-phase theory[J].Physica A:Statistical Mechanics and its Applications,2017,479(8):509-526.[6] CARLO C,ANTONELLA FERRARA.A variablelength cell transmission model for road traffic systems[J].Transportation Research Part C: Emerging Technologies,2018,97(12):428-455.[7] ÖZNUR Y.A stochastic continuous cellular automata traffic flow model with a multi-agent fuzzy system[J].Procedia-Social and Behavioral Sciences,2012,54(10):1350-1359. [8] 彭勇,刘世洁,DENNIS Z Yu.前后多车影响的跟驰模型及稳定性分析[J].交通运输系统工程与信息,2018,18(6): 41- 47.[PENG Y,LIU S J,DENNIS Z YU.Stability analysis of a car-following model with consideration of preceding and following vehicles[J].Journal of Transportation Systems Engineering and Information Technology,2018,18(6):41-47.]。
基于VISSIM_仿真的高校门口交通组织优化研究

河南科技Henan Science and Technology 电气与信息工程总第804期第10期2023年5月基于VISSIM仿真的高校门口交通组织优化研究马潇然谢江龙(攀枝花学院智能制造学院,四川攀枝花617000)摘要:【目的】随着汽车保有量与日俱增,部分城市道路已无法满足日益增长的交通需求,缓解早晚高峰时期造成的交通拥挤及交通事故已迫在眉睫。
【方法】本研究以攀枝花学院南门口的交通组织为例,在实地调研基础上进行VISSIM仿真。
【结果】采取优化交叉口信号配时和道路设施、减少冲突点等方案。
由仿真前后数据分析对比可知,交叉口的平均延误降低56.64%、平均排队长度降低41.47%,南门口的平均延误降低69.19%、平均排队长度降低57.91%,服务水平总体得到提升。
【结论】本研究设计的方案能有效减轻交通拥堵,提高道路交通的安全性与通行效率,是具有实际效益的普适性措施。
关键词:信号配时;交通设施优化;VISSIM仿真;平均延误;平均排队长度中图分类号:U491文献标志码:A文章编号:1003-5168(2023)10-0011-04 DOI:10.19968/ki.hnkj.1003-5168.2023.010.002Research on the Optimization of University Entrance TrafficOrganization Based on VISSIM SimulationMA Xiaoran XIE Jianglong(School of intelligent manufacturing,Panzhihua University,Panzhihua617000,China)Abstract:[Purposes]As car ownership increases,some urban roads have been unable to meet the grow⁃ing traffic demand.It is urgent to alleviate traffic congestion and traffic accidents caused by morning and evening rush hours.[Methods]This study takes the traffic organization at the south entrance of Panzhi⁃hua University as an example,and conducts VISSIM simulation based on field research.[Findings]The scheme of optimizing intersection signal timing and road facilities and reducing conflict points was ad⁃opted.According to the data analysis and comparison before and after the simulation,the average delay of the intersection is reduced by56.64%,the average queue length is reduced by41.47%,the average delay of the south gate is reduced by69.19%,the average queue length is reduced by57.91%,and the service level is generally improved.[Conclusions]The scheme designed in this study can effectively re⁃duce traffic congestion,improve road traffic safety and traffic efficiency,and is a universal measure with practical benefits.Keywords:signal timing;optimization of traffic facilities;VISSIM simulation;average delay;average queue length0引言随着经济的快速发展,汽车保有量也在迅速增加,在方便人们出行的同时,交通事故的数量也在急剧上升。
VISSIM交通仿真软件模型的构建

VISSIM交通仿真软件模型的构建一、背景介绍二、 VISSIM软件简介VISSIM是一款由德国PTV公司研发的交通仿真软件,可以对车辆、行人、信号灯等交通要素进行模拟,从而帮助用户分析交通流量、交通状况、交通信号灯等。
该软件拥有强大的仿真和分析功能,可以模拟不同的交通场景,提供多种交通流量控制策略,并且可以根据不同的情景进行优化和评估。
三、 VISSIM模型的构建1. 确定研究目标在构建VISSIM模型之前,首先需要确定好研究的目标。
明确研究的问题是什么,需要解决什么具体的交通问题,确定好研究的范围和目标,这样才能有针对性地构建模型。
2. 收集数据在构建VISSIM模型之前,需要收集相关的交通数据,包括道路布局、交通流量、车辆速度、交通信号灯控制等数据。
这些数据是构建模型的基础,只有充分了解和掌握了这些数据,才能更加真实地模拟交通状况。
3. 构建模型在收集了相关数据之后,需要开始构建VISSIM模型。
首先需要在软件中建立道路网络,确定好车道宽度、车道数目、路口位置、交通信号灯位置等基本参数。
然后根据实际情况,添加车辆、行人等交通要素,并设置他们的起始点和终点,模拟车辆和行人的行驶和行走过程。
最后设置交通信号灯的控制策略,根据实际情况模拟交通信号灯的变化过程。
4. 仿真模拟在模型构建完成之后,需要进行仿真模拟。
通过模拟不同的交通场景,观察和记录交通流量、车辆速度、交通信号灯变化等数据,分析交通问题,并尝试不同的交通控制策略,优化交通流量,提高交通效率。
5. 评估和优化在进行了一段时间的仿真模拟之后,需要对模型进行评估和优化。
根据仿真结果,分析交通问题的原因,提出改进措施,并在模型中进行优化调整,不断改进模型,使其更加贴合实际情况,提高模拟的准确性和可靠性。
1. 交通规划VISSIM模型可以用于城市道路规划和交通规划的研究和分析。
可以模拟不同的道路网布局和车辆流动情况,评估不同规划方案的交通效果,为城市交通规划提供科学依据。
基于元胞自动机的自动驾驶交通流仿真研究

基于元胞自动机的自动驾驶交通流仿真研究
基于元胞自动机的自动驾驶交通流仿真研究
邱小平1,2,3,马丽娜1*
【摘要】将Arnab Bose自动驾驶模型与经典的NaSch模型相结合,提出一个适用于自动驾驶的单车道元胞自动机交通流模型。
利用MATLAB语言对自动驾驶车辆运行情况进行仿真分析,发现模拟结果较好地呈现了自动驾驶环境下的交通流特征。
另外,还发现在自动驾驶中设置不同的车头时距对道路通行能力以及拥堵会产生很大的影响,车头时距为0.5 s时的通行能力约是车头时距为3 s的通行能力的4倍,当车头时距从4 s减小为1 s时交通拥堵可降低约95%,可以作为一种缓解拥堵的策略。
【期刊名称】西华大学学报(自然科学版)
【年(卷),期】2017(036)002
【总页数】5
【关键词】元胞自动机;自动驾驶模型;车头间距;车头时距;目标间距
·新能源汽车与低碳动输·
近年来,伴随计算机、信息、制造等先进高新技术和自动驾驶车辆技术的不断发展,以及智能技术在车辆和基础设施中的运用,使得交通系统变得更加高速、高效,自动驾驶汽车更是成为了当今最受关注的前沿科技之一,未来的道路交通系统很有可能因此而焕然一新。
在不久的将来,自动驾驶车辆将会成为主流,对于自动驾驶车辆交通流的相关研究,对缓解交通拥堵、提高道路利用率以及道路安全性都具有重要的意义。
元胞自动机模型是一种应用较为广泛的数学模型[2-6]。
由于元胞自动机本身具备的特征,在交通领域得到快速发展,成为20世纪末和21世纪初交通领域的。
基于元胞自动机的城市交通流模拟与仿真研究

基于元胞自动机的城市交通流模拟与仿真研究近年来,随着城市化进程的不断加快,城市交通问题日益凸显。
为了解决城市交通流量高峰时的拥堵问题,提高交通效率,研究人员们开始使用元胞自动机模型来进行交通流模拟与仿真研究。
一、元胞自动机模型简介元胞自动机是一种复杂系统建模与仿真的重要工具。
它由一系列格点(元胞)组成的二维网格构成,每个元胞代表一个交通参与者,可以是车辆、行人等。
每个元胞都有一定的状态和行为规则,如按照红绿灯信号进行行驶或停止等。
二、城市交通流模拟城市交通流模拟主要包括流量模拟和行为模拟两方面。
流量模拟通过统计每个时刻通过某一点的交通流量,来研究交通流量的分布和变化规律。
而行为模拟则是通过调整元胞的行为规则,控制交通参与者的行为,以实现交通流的优化与控制。
在城市交通流模拟过程中,研究人员可以根据真实的路网和交通组成,将其构建为元胞自动机模型,然后通过调整元胞的状态转换规则,模拟出不同时间段内的交通流量分布、拥堵现象等。
这样可以帮助决策者更好地了解和分析城市交通问题,从而制定更科学合理的交通规划方案。
三、元胞自动机在城市交通流仿真中的应用元胞自动机模型在城市交通流仿真中有着广泛的应用。
通过模拟交通流的运行情况,可以评估不同交通组织方式的效果,如交叉口信号灯、交通流量管制等。
此外,还可以通过模拟不同交通流量分布情况下的交通拥堵现象,探索拥堵产生的原因和解决方法。
另外,元胞自动机模型还可以用于研究特定道路网络中的交通流特性。
例如,可以通过模拟不同区域的交通流量分布,并分析路段的通行能力,以找出导致交通瓶颈的关键路段,并采用合适的调控措施来改善交通流动性。
四、元胞自动机模型的优势和挑战元胞自动机模型在城市交通流模拟研究中具有以下优势:首先,可以模拟大量交通参与者的行为,从而更真实地反映交通流的特征。
其次,可以通过调整元胞的行为规则,实现交通流的优化与控制。
再次,模型参数可调性强,模型灵活性高,适用于不同道路网络和交通组织方式的研究。
基于元胞自动机模型的可变信息标志(VMS)对交通流特性影响研究的开题报告
基于元胞自动机模型的可变信息标志(VMS)对交通流特性影响研究的开题报告一、研究背景和意义交通拥堵是城市发展过程中普遍存在的问题,而如何解决交通拥堵问题也成为当前城市规划和交通管理的重要研究领域。
在这方面,交通控制技术成为解决交通拥堵问题的重要手段之一,而可变信息标志(VMS) 作为交通控制技术的一种,因为其灵活、实用、成本低等优点,在城市交通控制中得到广泛的应用。
然而,目前对于VMS在交通控制中的作用和影响研究还比较有限,传统的研究方法多为推导理论公式或者采用仿真软件来模拟,而没有利用元胞自动机模型来进行数值模拟和探究。
因此,本文提出基于元胞自动机模型开展研究,旨在解决交通流中的问题,并探讨可变信息标志 (VMS) 对于交通流特性的影响,以期为城市交通规划和交通管理提供有益的参考。
二、研究内容1.建立元胞自动机模型,模拟交通流的基本参数,如车流密度、车速、交通容量、通行能力等。
2.考虑交通流中的不同车辆种类对于通行能力的影响,如大小型车辆、客车、卡车等不同车辆类型。
3.考虑交通流中不同的交通控制方式对于交通流特性的影响,其中重点关注可变信息标志(VMS) 对于交通流的影响,如VMS的位置、文字、颜色等因素对交通流的调节作用。
4.通过模拟实验,研究可变信息标志 (VMS) 对交通流特性的影响,分析可变信息标志 (VMS) 在不同交通流场景中的控制效果。
三、研究方法本研究主要采用元胞自动机 (CA) 模型来进行数值模拟,并进行参数灵敏度分析和对比实验等。
1.建立元胞自动机模型,描述道路拓扑结构和车辆移动规律,对车辆速度和密度进行数值模拟。
2.通过调整元胞自动机模型参数,如车流密度、车辆速度、道路长度等参数,来分析交通流特性的变化。
3. 建立可变信息标志 (VMS) 模块,通过考虑VMS的文字、颜色、位置等因素来模拟不同的交通控制方式。
4.采用参数灵敏度分析方法,通过更改模型中的参数来评估可变信息标志 (VMS) 对于交通流特性的影响程度。
基于VISSIM仿真系统构建3D交通环境
基于VISSIM仿真系统构建3D交通环境
柳祖鹏;许彩霞;张献峰
【期刊名称】《城市交通》
【年(卷),期】2008(006)004
【摘要】阐述了运用VISSIM仿真系统构建3D交通环境的方法和过程,为VISSIM 仿真系统的应用提供参考.介绍了仿真背蒂图、VISSIM的3D信号灯以及3D交通环境的要素和实现方式.利用VISSIM的可选模块V3DM建模时可分为两类模型,重点介绍了第1类3D模型的建立.总结了避免发生模型错位的注意事项和解决方法,即在缺少背景矢量文件的情况下,利用Adobe PDF虚拟打印机将路网信息打印到pdf文件,并通过Illustrator软件输出得到仿真路网的dwg文件.以武汉市建设大道为例,实现了逼真的3D交通环境效果.
【总页数】4页(P91-94)
【作者】柳祖鹏;许彩霞;张献峰
【作者单位】武汉科技大学,武汉,430081;湖北省邮电学校,武汉,430079;中国管理科学研究院武汉分院城市交通管理研究所,武汉,430010
【正文语种】中文
【中图分类】U491.1
【相关文献】
1.基于GoogleSketchup建模与PTVVissim仿真构建3D交通环境 [J], 李文栋
2.基于3Ds MAX与VRP-Builder的虚拟漫游系统构建 [J], 陈竹;莫伟健;林舒源
3.基于VRML和3DS MAX的虚拟现实系统构建 [J], 刘美菊;李志;韩凤艳
4.基于VISSIM仿真的高铁枢纽片区交通规划设计 [J], 朱健
5.基于物联网的福建省交通运输环境监测网络信息处理系统构建及应用研究 [J], 陈振兴;夏玉雄
因版权原因,仅展示原文概要,查看原文内容请购买。
VISSIM交通仿真软件模型的构建
VISSIM交通仿真软件模型的构建VISSIM交通仿真软件(Vehicle-Simulation-Software)是由德国PTV公司开发的一款用于城市交通规划和交通管理的仿真软件。
其可以模拟城市交通网络中的车辆、行人行为,通过可视化的界面分析交通流量、效率和安全性,帮助用户制定更科学的交通规划和管理方案。
VISSIM软件的模型构建是软件使用的关键环节,一个完善的模型构建可以有效地提高交通仿真的准确性和可靠性。
本文将从模型构建的基本流程、要点和技巧等方面介绍VISSIM交通仿真软件模型的构建。
一、基本流程1. 数据收集:首先需要收集城市道路、交叉口、信号灯、车辆和行人等相关数据,这些数据将作为模型构建的基础。
2. 路网建模:根据收集到的数据,进行路网的建模工作。
包括道路的长度、宽度、车道数、车道类型、路口的位置和形式等信息。
在VISSIM中添加节点和链接可以构建道路网络。
3. 信号灯设置:根据收集到的信号灯数据设置模型中的信号灯,设定交通灯的周期、绿灯时间、黄灯时间和红灯时间等参数。
4. 车辆建模:在VISSIM中建立车辆模型,设定车辆的属性、加速度、减速度、速度限制等参数。
5. 行人建模:根据实际情况设置行人模型,包括行人的行走速度、行走路径、行人交通规则等。
6. 情景设置:根据需要设置仿真的场景,包括模拟的时间段、交通流量等。
7. 仿真运行:完成模型构建后,进行仿真运行并观察分析结果。
二、模型构建要点1. 数据准确性:模型的准确性受数据的影响较大,因此在模型构建前要确保收集到的数据准确完整。
2. 参数设置:在模型构建过程中需要合理设置道路、车辆、信号灯等参数,保证模型的真实性和稳定性。
3. 场景选择:根据需要选择合适的仿真场景,包括不同的时间段、交通流量、交通事故等,通过不同的场景对模型进行验证和分析。
4. 车辆行为模型:根据实际情况合理设置车辆的行为模型,包括车辆的加速度、减速度、车距等参数,确保模拟结果的准确性。
基于元胞自动机的交通流仿真及其与信号预测控制相结合的研究的开题报告
基于元胞自动机的交通流仿真及其与信号预测控制相结合的研究的开题报告一、选题背景随着城市化的快速发展、人口城市化比例的不断提高以及汽车的普及,道路交通流量也日益增大,交通拥堵成为了城市交通运输的一大难题。
因此,交通流量仿真及信号预测控制成为解决城市交通拥堵的有效手段。
而元胞自动机作为一种基于组织结构的离散时间空的演化模型,在交通流量仿真及信号预测控制中具有广泛应用前景。
因此,本文将研究基于元胞自动机的交通流仿真及其与信号预测控制相结合的问题。
二、研究内容和方法本文的研究内容主要包括以下几个方面:1. 基于元胞自动机的交通流仿真模型的构建。
主要通过建立元胞自动机模型,模拟交通流的运动过程,考虑车辆、道路、环境等各种因素的影响,实现道路交通流量的仿真。
2. 交通信号控制模型的设计与实现。
通过分析当前道路网络的情况,设计交通信号控制模型,并通过模拟交通信号对交通流的调控,实现交通流拥堵的缓解和优化。
3. 建立交通流预测模型。
通过分析历史交通数据和当前交通情况,建立交通流预测模型,预测未来交通流量的变化趋势,并根据预测结果制定相关的交通流调控措施。
4. 实现交通流仿真与信号预测控制的相结合。
将上述三个模型相结合,实现交通流仿真与信号预测控制的协同作用,进一步提高交通流量的调控效能。
研究方法主要包括模型建立与模拟、历史数据分析和机器学习算法等。
三、预期成果和意义本研究预期能够建立基于元胞自动机的交通流仿真模型,设计交通信号控制模型,建立交通流预测模型,并实现交通流仿真与信号预测控制的相结合。
通过该研究,预计可以达到以下几个方面的预期目标:1. 缓解城市交通拥堵问题。
通过建立交通流仿真模型和交通信号控制模型,可以进一步优化交通信号的调控策略,缓解城市交通拥堵的情况,提高交通流量的运行效率。
2. 提高城市交通管理的科学化和精细化程度。
通过建立交通流预测模型和实现相结合的仿真与调控,可以实现对城市交通管理的科学化和精细化程度的提高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于VISSIM微观交通仿真软件的导流岛机非冲突元胞自动机模型
作者:连培昆李振龙荣建陈宁
来源:《计算机应用》2016年第06期
摘要:针对复杂的导流岛冲突区机非冲突行为,应用传统解析法得到的右转车道通行能力往往与实际运行状况偏差较大。
为此,提出了基于VISSIM微观交通仿真软件的导流岛机非冲突元胞自动机模型。
该模型利用VISSIM的组件对象模型编程,依据提出的元胞自动机规则集,通过设置一系列模拟元胞的检测器,来控制右转机动车的车速变化,从而模拟右转机动车面对非机动车或行人冲突时的截流效应,并同时利用VISSIM仿真软件的让行设置来控制非机动车或行人的过街行为。
仿真结果表明,利用该模型得到的右转车道通行能力值与实际观测值的平均相对误差为5.45%,优于传统的解析法,能够较好地反映导流岛冲突区的实际运行状况,从而为混合交通条件下导流岛渠化形式的规划、设计、交通管理与组织提供理论依据。
关键词:元胞自动机;VISSIM;机非冲突;导流岛;右转通行能力;交通工程
中图分类号: TP391.9;U491.114 文献标志码:A英文标题。