四连杆受力分析word版本
四连杆机运动学分析报告
栏杆机四杆机构运动学分析1 四杆机构运动学分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。
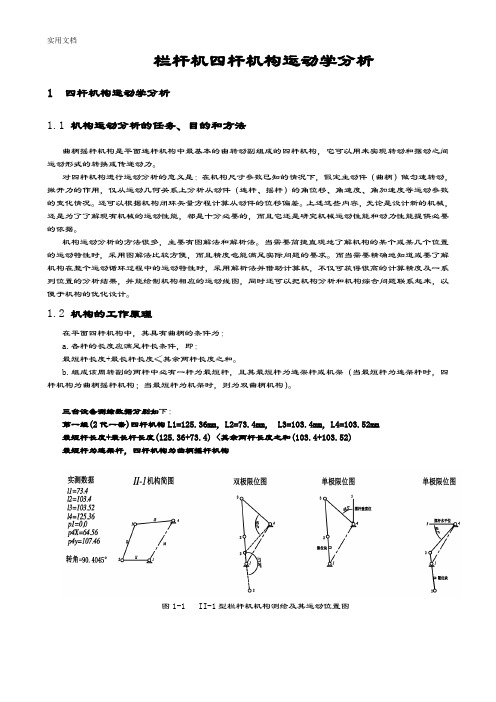
1.2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
三台设备测绘数据分别如下:第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm, L3=103.4mm,L4=103.52mm最短杆长度+最长杆长度(125.36+73.4) <其余两杆长度之和(103.4+103.52)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-1 II-1型栏杆机机构测绘及其运动位置图第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm最短杆长度+最长杆长度(125.36+50.1) <其余两杆长度之和(109.8+72.85)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-2 II-2型栏杆机机构测绘及其运动位置图第三组(3代)四杆机构L1=163.2mm,L2=64.25mm,L3=150mm,L4=90.1mm最短杆长度+最长杆长度(163.2+64.25) <其余两杆长度之和(150+90.1)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-3 III型栏杆机机构测绘及其运动位置图在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
四连杆受力分析

四连杆受力分析不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来确定个运动副中的反力和需加于该机构上的平衡力。
由于运动副反力对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
平衡力(矩)一一与作用于机构构件上的已知外力和惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已知生产阻力平衡力(矩)一一求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)一一求解机构所能克服的生产阻力一.构件组的静定条件——该构件组所能列出的独立的力平衡方程式的数目.§3-4不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力〉来确定个运动副中的反力和需加于该机构上的平衡力匕由于运动副反力对机构来说是内力*必须将机构分解为若干个杆组,然后依次分析中> + «力*1——占作用于机鋼构件上的已相平飯的未甘外力(E)己知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)| A平衡力(矩)——求解机构所能克服的牛产阻力-构件组的静定条件——轨构件谢所能列岀的m氏的力平術方fiSftftS.10等于构件组中两有力的未知要責的81目"豪亘的力罕对扌程丸的救耳=所韦帶的来知要索的itq。
t运动樹中反力曲未知里秦n转动副——(2个)-丸小---- ?{方為—?作用点卡动副中心2 •构件fin*定条件设某构件组共有沖个构件*几个低副、几个高副>f构件可以列出§个独立的力平鎮方程,科个构件共有為个力平衡方程>一个平面低副引入2个力的未知数,円个低副共引入2円个力的未知数>—个平面高副引入1个力的未知数,几个低副共引入几个力的未知数而当构件组仅有低副时,则为『3归耳绘冷;羞專杆粗那满足鼻直条件二.用图解法作机构的动态静力分析步骤:1)对机构进行运动分析*求出个构件的住及其质心的吗$2)求出各构件的惯性力,并把它们视为外力加于构件上*3)根据静定条件将机构分解为若干个构件组和平衡力作用的构件:4)对机构进行力分析,从有已知力的构件开始,对各构件组进行力分析;5)对平衡力作用的构件作力分析。
四连杆独立悬架性能分析
四连杆式独立悬架1.引言汽车悬架是车轮与车身之间一切装置的总称,其功用在于: 在垂直方向减振和起悬挂作用; 在侧向可防止侧倾与左右车轮载荷转移; 在行驶方向上保证驱动与制动的实现并保持方向稳定性。
所以,汽车悬架系统对汽车的操纵稳定性、乘坐舒适性都有很大的影响。
悬架形式也在不断发展, 从非独立悬架到独立悬架, 从被动悬架到半主动悬架、主动悬架, 其中四连杆式悬架就是一种比较新型的独立悬架形式。
在 HI 世纪 LI 年代初, 四连杆式悬架率先应用于奥迪 AD 平台, 并逐渐成为德国大众旗下中高档轿车的标准配置。
2 .悬架运动学与车辆行驶性能悬架运动学特性在使用中首先反映在车轮定位参数的变化趋势上,实际的独立悬架在行驶弯路时, 车轮会同车身一起侧倾。
如果考察轮胎的侧偏角度, 若承载较高的外侧车轮相对地面趋向于正的外倾方向, 会导致该侧轮胎的侧偏性能降低。
比较理想的补偿方式是将悬架设计成上跳时外倾角向负值方向变化的形式, 而在下落时则向正方向变化。
为了使轮胎磨损不因侧偏而加剧,同时不增加滚动阻力和不影响直线行驶能力,车轮前束在跳动过程中应尽可能保持不变。
特别对于前独立悬架,通过此种设计可减小前轮侧偏角,使之保持不足转向性能。
在经典的汽车理论中,车辆的侧倾被定义为车身绕前后悬架侧倾瞬心连轴线的旋转。
在车辆载荷、侧向加速度、车辆重心高度和整车侧倾刚度均一定时,用来表征车辆侧倾程度的车身侧倾角的大小取决于前后悬架侧倾中心的高度。
但是,侧倾中心的高度并不是越大越好,除会影响驾驶员行车的路感之外,侧倾角度的减小同轮胎磨损之间存在不可调和的矛盾 。
式中,p 为侧倾中心高度;l 为悬架轮距;s 为轮跳。
由式 ( 1)可见, 轮距轮跳变动率 dl/ds 增加会引起滚动轮胎侧偏加剧, 增大滚动阻力, 加剧车辆侧偏和轮胎磨损, 尤其在转向独立悬架上的表现更为明显。
因而, 现代悬架在设计中必须采用优化方案, 在兼顾减小轮距变化的同时通过横向稳定杆增加侧倾刚度以减小侧倾角。
四连杆受力分析
四连杆受力领会之阳早格格创做
没有计摩揩时机构的受力领会根据机构所受已知中力(包罗惯性力)去决定个疏通副中的反力战需加于该机构上的仄稳力.由于疏通副反力对于机构去道是内力,必须将机构领会为若搞个杆组,而后依次领会.仄稳力(矩)——取效率于机构构件上的已知中力战惯性力相仄稳的已知中力(矩)相仄稳的已知中力(矩)已知死产阻力仄稳力(矩)——供解包管本动件按预约疏通顺序疏通时所需要的驱能源(矩)已知驱能源(矩)仄稳力(矩)——供解机构所能克服的死产阻力一. 构件组的静定条件——该构件组所能列出的独力的力仄衡圆程式的数目.。
连杆受力分析完整版

连杆受力分析
HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
四连杆受力分析
不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来
确定个运动副中的反力和需加于该机构上的平衡力。
由于运动副反力
对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
?平衡力(矩)——与作用于机构构件上的已知外力和
惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已
知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)——求解机构所能克服的生产阻力一. 构件组的静定条件——该构件组所能列出的
独立的力平衡方程式的数目.。
四连杆机构原理 受力
四连杆机构原理受力四连杆机构是一种常用的机械传动装置,由四个连杆组成,可以实现复杂的运动轨迹。
在四连杆机构中,各个连杆之间的受力关系是非常重要的,它直接影响到机构的运动特性和稳定性。
我们来看一下四连杆机构中各个连杆的受力情况。
四连杆机构由一个固定连杆、两个活动连杆和一个驱动连杆组成。
固定连杆连接固定点和驱动点,活动连杆连接驱动点和工作点,驱动连杆连接工作点和固定点。
在四连杆机构中,驱动连杆是通过驱动点的力来产生运动的,而活动连杆则转化这个运动,并将其传递给工作点。
在四连杆机构中,各个连杆之间的受力关系是相互影响的。
首先,固定连杆在连接点处受到驱动点的力,这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使固定连杆产生水平方向的拉力,垂直方向的分力使固定连杆产生垂直向上的压力。
这些受力使得固定连杆保持稳定,并且不会发生位移。
接下来,活动连杆在连接点处同样受到驱动点的力。
这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使活动连杆产生水平方向的拉力,垂直方向的分力使活动连杆产生垂直向上的压力。
这些受力使得活动连杆具有一定的刚度,并且可以传递驱动点的力给工作点。
驱动连杆在连接点处同样受到驱动点的力。
这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使驱动连杆产生水平方向的拉力,垂直方向的分力使驱动连杆产生垂直向上的压力。
这些受力使得驱动连杆能够将驱动点的力传递给工作点,并且实现机构的运动。
四连杆机构中各个连杆之间的受力关系是非常重要的。
固定连杆、活动连杆和驱动连杆都承受着来自驱动点的力,这些力使得连杆产生拉力和压力,并且保持机构的稳定性和运动特性。
在实际应用中,我们需要根据具体情况来选择合适的连杆长度和连接方式,以确保机构的可靠性和性能。
四连杆机构中各个连杆之间的受力关系是非常重要的。
了解这些受力关系可以帮助我们更好地设计和应用四连杆机构,实现所需的运动轨迹和功能。
同时,我们还需要注意机构的稳定性和可靠性,确保机构在工作过程中不会出现失效和故障。
四连杆机构的运动分析方法
1,定义两个固定夹板-"刚性接合"
2,定义两块连接板-"刚性接合"
3,定义连接板与手柄-"刚性接合"
4,定义连接板-"刚性接合"
5,定义连接板与夹板旋转轴-"螺钉接合",选择驱动角度,点击确定
6,定义夹板与压臂旋转轴-"螺钉接合",不选择驱动角度,点击确定
7,定义两种连接板旋转轴-"螺钉接合",不选择驱动角度,点击确定
8,定义压臂与内连接板旋转轴-"螺钉接合",不选择驱动角度,点击确定
8,固定夹板-选择"固定",点击夹板实体即可跳出可运动模拟的对话窗
9,点击"使用命令进行模拟"-方框内图标,跳出如图对话框.。
四杆机构构件的受力分析和强度-精选文档
力偶
力偶的三要素
力偶矩的大小、力偶的转向、力偶的作用面
力偶的基本性质
• 力偶的基本性质 – 力偶无合力(不能用一力替代,力:移动效应,力偶: 转动效应) – 力偶中两个力对其作用面内任意一点之矩的代数和, 等于该力偶的力偶矩(与矩心的选择无关 M=Fd) – 力偶的可移动性即等效性(保持转向和力偶矩不变) – 力偶的可合成性:(M=M1+M2+¨¨+Mn) • 平面力偶系 – 合成 – 平衡
杆件横截面的应力和变形
1.应力的概念:
内力在截面上的集度称为应力(垂直于杆横截 面的应力称为正应力,平行于横截面的称为切应力)。 应力是判断杆件是否破坏的依据。 应力单位是帕斯卡,简称帕,记作Pa,即l平方米 的面积上作用1牛顿的力为1帕,1N/m2=1Pa。 1kPa=103Pa,1MPa=106Pa 1GPa=109Pa
作用力和反作用力总是同时存在,同时消失,等值、反 向、共线,作用在相互作用的两个物体上. 若用F表示作用力,又用F’表示反作用力,则 F = -F’ 在画物体受力图时要注意此公理的应用。
公理5 刚化原理
变形体在某一力系作用下处于平衡,如将此变形
体刚化为刚体,其平衡状态保持不变。
柔性体(受拉力平衡)
伸长率:
L1 L 100 L
A
%
%
断面收缩率 : A A1 100
L1 —试件拉断后的标距 L—是原标距 A1 —试件断口处的最小横截面面积 A—原横截面面积
M F 300 力偶
转矩 T=50N.m
工程中的转矩:
转矩Me =9550
P(kW)
n(r/min)
(N.m)
P —— 转轴的功率
四连杆机构受力分析例题和详解
M (O) : F
AB OA
l sin 30 M 1 0
FAB 5 N ()
(2)对 段进行分析有
M (O ) : F
1
AB O1B
l
M2 0
M 2 3N m
4.4 铰 接 四 连 杆 机 构 OABO1 在 图 示 位 置 平 衡 , 已 知
OA 0.4m, O1 B 0.6m ,一 个力 偶作 用 在曲 柄 OA 上 ,其 力偶矩
M 1 1N m ,各杆自重不计,求 AB 杆所受力以及力偶矩 M 2 大小。
解: (1)对 AO 段分析有
F1 6 F2 4
2-10 四连杆机构 ABCD 中的 AB=0.1m, CD=0.22m,杆 AB 及 CD 上各作用一力偶。 在图示位置平衡。已知 m1=0.4kN.m,杆重不计,求 A、D 两绞处的约束反力及力偶矩 m2。
题 2-10 图
3-7 四连杆机构在图示位置时平衡,α=30,β=90。试求平衡时 m1/m2 的值。
解: O1 A , O2 B 受力如图,
由 O1 A 杆: O2 B 杆: 且 有:
M 0
,分别有:
m1 FAB 6a sin 30
(1)
m2 FBA 8a 0
(2
FAB FBA
(3)
m1 3 m2 8
将(3)代入(2)后由(1)(2)得:
AB杆: M 0,FB l AB sin 30 M 1 CD杆 M 0, FB l CD sin 75 M 2 解得: M 2 1.7 kNm
2-5 在四连杆机构 ABCD 的铰链 B 和 C 上分别作用有力 F1 和 F2, ,机构在图示位置 平衡。求平衡时力 F1 和 F2 的大小间的关系。
四连杆机运动学分析
栏杆机四杆机构运动学分析1 四杆机构运动学分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。
1.2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
三台设备测绘数据分别如下:第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm最短杆长度+最长杆长度(125.36+73.4) <其余两杆长度之和(103.4+103.52)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-1 II-1型栏杆机机构测绘及其运动位置图第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm最短杆长度+最长杆长度(125.36+50.1) <其余两杆长度之和(109.8+72.85)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-2 II-2型栏杆机机构测绘及其运动位置图第三组(3代)四杆机构L1=163.2mm,L2=64.25mm,L3=150mm,L4=90.1mm最短杆长度+最长杆长度(163.2+64.25) <其余两杆长度之和(150+90.1)最短杆为连架杆,四杆机构为曲柄摇杆机构图1-3 III型栏杆机机构测绘及其运动位置图在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四连杆受力分析不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来确定个运动副中的反力和需加于该机构上的平衡力。
由于运动副反力对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
平衡力(矩)一一与作用于机构构件上的已知外力和惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已知生产阻力平衡力(矩)一一求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)一—求解机构所能克服的生产阻力一.构件组的静定条件——该构件组所能列出的独立的力平衡方程式的数目.§3-4不计摩擦时机构的受力分析根据机构所受已知外力(包括慣性力)来确定个运动副中的反力和需加于该机构上的平衡力乜由于运动副反力对机构来说足内力,必须将机构分解为若干个杆组,然后依次分析多沪宰術力r«j ——与作用于机已知外力A18K力相平飯的未知外力(更)已知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)■平衡力(矩)——求解机构所能克服的生产阻力r 构件组的静定条件——孩脚件组所能则出的独P 的力平痢疗程式的數目.用等于构件塑中險有力曲未知嬰素的数目。
豪丈首力毕衡方烈丸的it 貝=所有力召来知要盍的撤口 *2)移动副 ——(2个){-大*b ----- ?方向——垂直移动导路 柞用A ——?3)平面高副——(1个)「九 J* ?F ff :方匀一法线I 作用点——挟*k 点2•榔件t 运动聞中反力的未初里索"转动副——(2个)[X.4* ----- ?方甸——?杵用点——转动副中心A设某构件组共有H个构件.丹个低副.几个高副>一个构件可以列出s个独立的力平衡方程,用个构件共有佝个力平衡方程>一个平面低副引入2个力的未知数,的个低副共引入切彳个力的未知数>—个平面高副引入1个力的未知数.几个低副共引入几个力的未知数轲件《Li6奮龙秦件』| 3“匚2巧;耳而当构件组仅有低副时,则为* 3/f = 2P f结怡:空本杆组寿满足#岌条件二.用图解法作机构的动态静力分析步骤:1)对机构进行运动分析,求出个构件的。
及其质心的认;2)求出各构件的惯tfe力,井把它们视为外力加于构件上:3)根据静定条件将机构分解为若干个构件组和平衡力作用的构fh4)对机构进行力分析,从有已知力的构件开始,对各构件组进行力分析$ 5)对平衡力作用的构件作力分析。
[ft]如图所示为一往复式运输机的机构运动简图*已知各构件尺寸冒G“抵、<7r 吋F八不计其他构屛的重量和惯性力。
求各运动副反力及需加于构件点的平衡力仇(沿心方向〉.'I(1)选比例尺W八卩严出/作机构运动(6、握度图(图b)、加速度酌(图亡)・(2)«定各料件的債性力R«tt jb*£i构件乙齐产呻乂 =(印应”右_ % =丿虽绻=心编R"产・心皿"工1)将各构件产生的惯性力视为外力加于拥应的构件上.U f h严f血(f"l]与%2反向□与磅反向)构件応—個§磚=\GJ酉)(3)41HA4li»力分tha2>分解杆俎:4-5. 2-33)进行力分析=•先从构件组— 开始,由于不考虑 构件啲重量及惯 性力,故构件伪 二力杆.且有:■MH^54 =此时可取滑块坊分离体,苑方程G 5+^+e 5+^;+^5=o方向* 77 d P V大小:V V ??G *人*卜M +卜化+卜*肚=“7 V P P 7V ? ?取力比例尺旳 (N / mm)作力多边形 由力多边形得,d F 碍二“F 竺 片破=p 卜擬方向:尸再分析杆组N 3构件k ^M c=0 斥丛-G监+巧出“_ * _^12 = (&虫・卩的兀构件3:和辭如-FjfM; = °”戶需=/炖耐/心杆组氛3;E^ = o用^ +弘3 +用眾+耳? *% 4用1 z+用i 1"方向川V严最后取构件怙分离休按同作力多边形由力多边形得:F札=込肝F耐=pj艺耳=0巧m十E +陰产°方向N 7 <大小:< ? ?按冷作力多边形由力多边形得:F b = P「f _ 尸J?机二K F聊三鲁用解析法作机构的动态静力分析L 矢量方程解析法任圈4 - 6中,设为刚体上A 点的作用 力,半该力对刚休上任意恵0取矩时,则r 4 • P=r Pc&s (PO* - a) = rPstna以图4-7所示机构为例, 确定齐运动制中的反力及需 加于主动件1上的平衡力矩LVU )首先建立一直角塑标系,并将各 构件的籽光咼及方位角示出,如图 所示.然后再设各运动副中的反力 为佗)首解运动副;机构中首解副的条件是;组成该运动副的两个构件上的作用外力和力矩均为已知者.在本实例中.运动副「为应为首解副。
⑶求陽取构件3为分离休.并取该构件上的诸力对D 点取矩(规定力矩的方向逆时炸 者为正,顺吋针看为负几则沁二0A/0= F PsJM (3f字二字=_弓14=心』十R 机』 R 丑—J?U = ~ Rn = R :“ 十尺垃yjR C =-H B »Rp = R J 4 二于是得 第用23 - 订尺如"〉一 Mr=—』送餡上皿3 + I a Ji2j y 005^3 ~ M r -0同塑取构件2为分离体,并取诸力对B 点取矩,则如厂0 ?1^H + (a f + ^)*P« ・心;卜(尺址;+ «23y;)+心:+ P =耳斤也鈕% - ZjPjjyCT^ - 4iPain (tfi-如、(血-Op )~Q⑶求吗根搦构件3上的诸力平衡条件5F-0 ■= - R 23(①求心根据构件2上的诸力平衡条件^F=0■ K 12tR« + P^0 分别用i 及;点积上式,可求得/?% = R 込■ Pens 外.局分=/?场-升R 堆土 Rut* +^uj/⑸求心同理,根抵构件1的平At 条件SF=C S&"12£|X-Rn = h 書r YR*/ + Riiij ) =亠2曲皿血也+ IjP^lyCOsfij至此,机构的受力分析班行完毕.因jtt 可得&»=血(<rj:四譽*辔[心附…小沁他5)】 Psind 3—J 十―[asin (血-如 +■ bcos (% —外)]2矩阵法如图为■四杆机构,图中1、2> 3 分别为作用于质心@八丫严凡处的已知外力{含惯性力)” M广V,.力寸为作用丁各构件上的已知外力偶楚(含惯性力偶矩),另外,在从动件上还受看一介已知的生产阻力矩叭.现霜确定各运动副中的反力及需加于原动件1丄的平耨力偶矩必屮如图所示先建立一直角坐标糸,以便将各力都分解为沿两坐标轴的两个分力,然后再分别就构件L ® 巩山它们的力的平術方程式•又为便于列矩阵方程,1)可解性分析:在四杆机构中,共有四个低副,每个低副中的反力都有两个却要秦(即反力的大小及方向),此外.葩力尚有一个力的未知聲秦, 所以在此机构中共有九个耒知要素待定;而另一方面*在此机构中,对三个活动梅件共可列出九个平衡方程*故此机构中所有苗力的耒知要素都是可解的<■2)屁力的统一表示:用运动副中反力叫』表示构件i作压于构用上的反力,而R『叫所以各运动副中的反力统一写咸陽的形式{即反力心用■心表示之h 3)力矩的统一表达式:作用于构杵上任一点丿' 上的力件对该构件上另一点K之矩(规定逆时针方向时为正,顺时针方向时为负),可表示为下列统一的形式M K=(加- y『)Pj> + {欧-%)Pj 式中® j-—力作用点啲坐标, 誥皆J*K——(A取矩点直的坐标。
4)各构件的力平衡方程式•对于构件I分别根据池"瓯“ 可得-(*"曲尺滋-(帀-“用血+矶=- (% -畑)鬥厂(畑一斗疔1厂⑷-级一=一F"—R'灯—^I2r=一P^F•对于构件2有(刈-刘)血轴一(工匸-龙JR眄--(圳-班)已工-(山-堆〉已厂M2尺皿~ - F鹉^Uy_^2Jr=-嘉•对于构件3有Tw m)斤琼-(6一丁』金旳=一(牝-旳,)马工~(工网一牝)戸刘一M, 4坯J?茁工-辰詔区二■ Fas尺洛》■ P为以上共列出九个方程式,故可解岀上述各运功副反力和平衡力的九个力的未知要素’又因为以上九式为一域性方程俎,因此可按构件X人3上持定的未知力M沪召p吃w k|2V叫冷k23e R* R MV R坤的次序整理成以下的矩阵形武:100 寸*些-工・-构洋0T Q-1 0000—1 D -1局打6 。
片-刃ra-f L 0 -10ff 1 0'・・-1 £0°yu~ Mr % - r呜0 f 10 - U I]iR-uv0 1 0 1 -■R H”y«i =珈m ■ g!M 1-i o0Px« (1)" - —■ lies .”." —r>SJ -yu 工,亠上班]0-1 0 I.0(1 — 1■1ZM =丸■ I mu aiiiBMiJEl 列辆Mj- W,01ft-1u他00-1 a%上式可以简化为[C]{ R}=ID]{ P}式中{P}—□知力的列阵;{片}——未知力的列阵;\D\——已扣力的系数矩阵:[C]——末知力的系Jfc矩列臥对于各种具体机构,都不难按上述的步骤进行分析,即按顺序对机构的每一活动构件写出其力平衡方程式,然后整理成为一个线性方程,并写成矩阵方程式耳利用上述形式的矩阵方程式,可以同时求出各运动副中的反力和所需的平衡力*而不必按静定杆组逐一进行推算, 而且根据这种矩阵方程式便于利用标准程序且计算机解算.§ 3-5考虑摩擦时机构的力分析耆氏摩住耐,机构旻力分析尙多星务上1) 廿算出摩擀角和半径,并2) M二力杆着手分#L根据杆件受竝或受压风该杆和对于弭一秆件的转动方骨,玄得作用在该构件上的二力方向;3) 3HWEJED力作用作力分折匚4) 对雲求的力所在构件作力分斯。
掌握了对运动副中的摩擦分析的方袪后,就不难在考虑有摩擦的条件卜,对机构进行力的分析了「卜面我们举两个例子加以说明芬例:图示为一四杆机构* 构件1为主动件,己知驱动力矩不计构件的賂重量和惯性力。
求各运动副中的反力及作用在构件3上的平衡力矩协护if:V成椅伴2斯曼输两力5加甩2的才位*2) JK•海1秀》之体——具上柞用有:甩 1 * nw-i' M 由为平術条件得土F R4]=-F R21 且有:M^F^L^F^M./L例如图所示为一曲柄滑块机构,设各构件的尺寸(包括转动副的半径)已知』各运动副中的摩擦系数均为刀作用在滑块上的水平阻力为0试对该机构在图示位置时进行力分析(设各构件的重力及惯性力均略而不计并确定加于点〃与曲柄甘ZJ垂直的平衡力的大小。