EPEC控制器CANOPEN使用说明
CANopen使用手册(V1.00)
CAN open使用手册ProNet伺服驱动器ESTUN修订记录日期修订版本描述作者2009/4/25 1.00 初稿完成移振华2009/9/22 1.00 增加第8章移振华—— 目录 ——1、概述 (5)1.1 CAN 主要相关文档 (5)1.2 本手册使用的术语和缩语 (5)1.3 CANopen概述 (6)2、接线和连接 (7)3、CANopen通讯 (8)3.1 CAN标识符分配表 (9)3.2 服务数据对象SDO (10)3.3 过程数据对象PDO (12)3.3.1 PDO参数 (14)3.4 SYNC报文 (20)3.5 Emergency报文 (21)3.6 HEARTBEAT报文 (23)3.7网络管理(NMT) (24)4、单位换算单元(Factor Group) (26)4.1 单位换算相关参数 (27)4.1.1 position factor (27)4.1.2 velocity factor (29)4.1.3 acceleration factor (30)5、位置控制功能 (31)5.1 位置控制相关参数 (33)6、设备控制 (35)6.1 控制状态机 (35)6.2 设备控制相关参数 (36)6.2.1 controlword (37)6.2.2 statusword (38)6.2.3 shutdown_option_code (39)6.2.4 disable_operation_option_code (40)6.2.5 quick_stop_option_code (40)6.2.6 halt_option_code (41)6.2.7 fault_reaction_option_code (41)7、控制模式 (42)7.1 控制模式相关参数 (42)7.1.1 modes_of_operation (42)7.1.2 modes_of_operation_display (43)7.2 回零模式(HOMING MODE) (44)7.2.1 回零模式的控制字 (44)7.2.2 回零模式的状态字 (44)7.2.3 回零模式相关参数 (45)7.2.4 回零方法 (47)7.3 速度控制模式(PROFILE VELOCITY MODE) (49)7.3.1速度模式的控制字 (49)7.3.2 速度模式的状态字 (49)7.3.3 速度控制模式相关参数 (49)7.4 位置控制模式(PROFILE POSITION MODE) (53)7.4.1 位置模式的控制字 (53)7.4.2 位置模式的状态字 (53)7.4.3 位置控制相关参数 (54)7.4.4 功能描述 (56)8、CAN通讯相关参数 (58)附录对象字典表 (59)1、概述1.1 CAN 主要相关文档Document Name Source 3014.01: CiAVDSCiACANopen Communication Profilefor Industrial Systems - based on CALCiA DSP 402 V 2.0: CiACANopen Device Profile1.2 本手册使用的术语和缩语CAN控制器局域网CiA在自动化国际用户和制造商协会中的 CAN。
CANopen使用手册_V1.01_.

ProNet 伺服驱动器ESTUNCANopen 使用手册修订记录日期修订版本描述作者初稿完成移振华增加第8章移振华1、第3,3,1章“PDO 参数”,修正PDO 默认表格中的COB-ID 和default 值;易健2、增加第9章“通讯例程”——目录——1、概述............................................................................................................................................ . (5)1.1 CAN 主要相关文档 (5)1.2 本手册使用的术语和缩语 (5)1.3 CAN OPEN 概述 (6)2、接线和连接 (7)3、CANOPEN 通讯 (8)3.1 CAN 标识符分配表 (9)3.2 服务数据对象SDO (10)3.3 过程数据对象PDO (12)3.3.1 PDO参数 (14)3.4 SYNC 报文 (20)3.5 E MERGENCY 报文 (21)3.6 HEARTBEAT 报文 (23)3.7网络管理(NMT ) (24)4、单位换算单元(FACTOR GROUP) (26)4.1 单位换算相关参数 (27)4.1.1 position factor (27)4.1.2 velocity factor (29)4.1.3 acceleration factor (30)5、位置控制功能 (31)5.1 位置控制相关参数 (33)6、设备控制 (35)6.1 控制状态机 (35)6.2 设备控制相关参数 (36)6.2.1 controlword (37)6.2.2 statusword (38)6.2.3shutdown_option_code (3)96.2.4disable_operation_option_code (40)6.2.5quick_stop_option_code (4)6.2.6halt_option_code (41)6.2.7fault_reaction_option_code (41)7、控制模式 (42)7.1 控制模式相关参数 (42)7.1.1modes_of_operation (42)7.1.2modes_of_operation_display (43)7.2 回零模式(HOMINGMODE ) (44)7.2.1 回零模式的控制字 (44)7.2.2 回零模式的状态字 (44)7.2.3 回零模式相关参数 (45)7.2.4 回零方法 (47)7.3 速度控制模式(PROFILE VELOCITYMODE ) (49)7.3.1速度模式的控制字 (49)7.3.2 速度模式的状态字 (49)7.3.3 速度控制模式相关参数 (49)7.4 位置控制模式(PROFILE POSITIONMODE ) (53)7.4.1 位置模式的控制字 (53)7.4.2 位置模式的状态字 (53)7.4.3 位置控制相关参数 (54)7.4.4 功能描述 (56)8、CAN 通讯相关参数 (58)9、CANOPEN 通讯例程 (59)9.1 SDO 操作; (59)9.2 PDO 配置 (59)9.3 位置控制例子(P ROFILE P OSITON MODE ) (60)9.4 位置插补控制(I NTERPLATE P OSITION MODE ) (61)9.5 速度控制(P ROFILE V ELOCITY MODE ) (62)9.6 回零 (6)2对象字典表 (64)1、概述1.1 CAN 主要相关文档 CiA DS 301 V 4.01: CiA CANopen Communication Profilefor Industrial Systems - based on CALCiA DSP 402 V 2.0: CiA CANopen Device Profile1.2 本手册使用的术语和缩语CANCiACOBEDSLMTNMTOD参数PDORORWSDO控制器局域网在自动化国际用户和制造商协会中的 CAN。
EPEC 2024 控制器 说明书
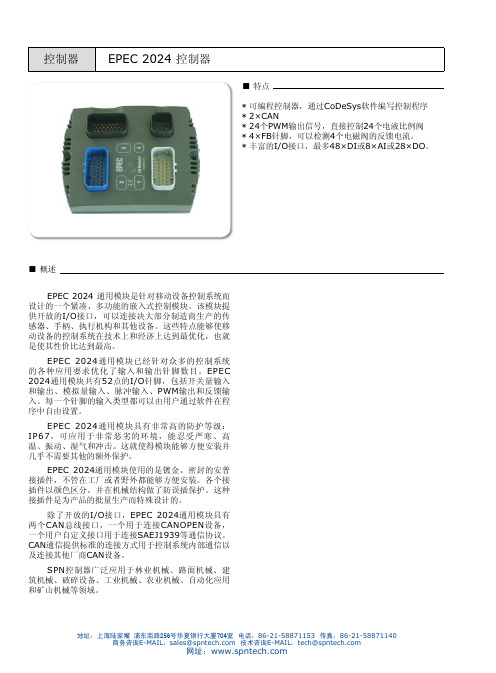
■概述EPEC 2024 通用模块是针对移动设备控制系统而设计的一个紧凑、多功能的嵌入式控制模块。
该模块提供开放的I/O接口,可以连接决大部分制造商生产的传感器、手柄、执行机构和其他设备。
这些特点能够使移动设备的控制系统在技术上和经济上达到最优化,也就是使其性价比达到最高。
EPEC 2024通用模块已经针对众多的控制系统的各种应用要求优化了输入和输出针脚数目。
EPEC 2024通用模块共有52点的I/O针脚,包括开关量输入和输出、模拟量输入、脉冲输入、PWM输出和反馈输入。
每一个针脚的输入类型都可以由用户通过软件在程序中自由设置。
EPEC 2024通用模块具有非常高的防护等级:IP67,可应用于非常恶劣的环境,能忍受严寒、高温、振动、湿气和冲击。
这就使得模块能够方便安装并几乎不需要其他的额外保护。
EPEC 2024通用模块使用的是镀金、密封的安普接插件,不管在工厂或者野外都能够方便安装。
各个接插件以颜色区分,并在机械结构做了防误插保护。
这种接插件是为产品的批量生产而特殊设计的。
除了开放的I/O接口,EPEC 2024通用模块具有两个CAN总线接口,一个用于连接CANOPEN设备,一个用户自定义接口用于连接SAEJ1939等通信协议。
CAN通信提供标准的连接方式用于控制系统内部通信以及连接其他厂商CAN设备。
SPN控制器广泛应用于林业机械、路面机械、建筑机械、破碎设备、工业机械、农业机械、自动化应用和矿山机械等领域。
■技术参数■控制器经过测试■ I/O配置I/O说明简介,详细请参考EPEC 2024用户手册内部电路原理图■ 电气特性■电气特性注释1 :超过最大值会导致输入点损坏内部电路原理图■ PWM频率控制分组■ DI/DO/PWMXM1.1 XM1.2 XM1.3 XM1.4 XM1.7 XM1.8 XM1.14 XM1.15 XM1.16 XM1.17 XM1.22 XM1.23 XM2.1 XM2.2 XM2.5 XM2.6 XM2.7 XM2.8 XM2.9 XM2.10 XM2.16 XM2.17 XM2.22 XM2.23■电气特性■电气特性■电气特性■ 电气特性地址:上海陆家嘴 浦东南路256号华夏银行大厦704室 电话:86-21-58871153 传真:86-21-58871140商务咨询E-MAIL :*****************技术咨询E-MAIL :****************网址:●2只M6螺钉(DIN912标准)●垂直或水平安装,如上图● 关于模块安装的详细信息请参考用户手册中模块的安装和接线说明。
EPEC2023用户手册簿

PLC SET 1 (2023) 控制器PLC SET 1 (2023) 控制器硬件手册2023G01.doc2005-01-28简介Epec Oy建于1978年,位于芬兰的Seinajoki。
Epec专业生产各种工程机械等户外机械的控制系统。
Epec自己设计、生产控制系统的电器组件、可编程控制器、显示器等。
Epec密切注意产品质量,满足客户产品使用环境和控制工作的特殊要求。
在提交系统的同时,Epec还提供培训、产品使用指导、维护和操作手册等。
根据客户要求,Epec也可与用户一同对控制系统做进一步开发。
Epec积累了二十多年的经验并与客户保持着良好合作关系。
Epec已成为欧洲工程车辆自动控制领域的领头羊。
本样本包含了电器工程师设计控制系统所需的电器特性和参数。
版权所有未经许可不得翻印。
EPEC 4G模块家族Epec 4G是EPEC OY开发的第四代CAN控制系统模块。
Epec 4G是基于长期恶劣环境如高震动、大温度变化和潮湿等条件下仍能正常可靠的工作而开发的。
高可靠性和安全性是它们的优点。
在它小巧的机身里藏着高性能的微处理器。
特性应用·ISO高速CAN1接口(CANopen)·伐木机械·ISO高/低速CAN2接口(CAN2.0B)·道路维护·供电10—30VDC,编程时要求大于11.5V ·建筑机械·建议24VDC供电·破碎设备·程序时钟周期默认10ms(可改)·工业设备·248个16bit参数·农业机械·高压和过载保护·自动化应用·过热保护·凿岩机械·输出短路保护·镀金接触、自锁、密封良好的连接器一个8针安普接插件(总线和供电)三个23针安普接插件(I/O)·小尺寸147χ113mmχ35mm总线连接外壳●全封闭轻铸铝外壳●喷丸涂漆安装●2只M6螺钉(DIN912标准)●如果使用Epec防冲击保护罩(E10801109),推荐用Epec E10701038紧固螺钉●垂直或水平安装,如下图接插件●镀金接触、自锁、密封良好的连接器●一个8针AMP接插件(总线和供电)XM4型号为:KX0187●三个23针AMP接插件,灰色XM1、蓝色XM2、黑色XM3各一个,型号分别为:KX0007,KX0009,KX0008●23*3+8*1=77根AMP镀金插针,型号为:KX0010安普电缆线尺寸重量0.7KG操作温度-40O C…+70O C储存温度-50O C…+85O C防护等级●IP67●只有按规定选择正确的电缆线、插头和工具方可保证高品质。
EPEC控制器CANOPEN使用说明

EPEC控制器CANOPEN使用说明本CANOPEN采用的标准的CAN数据格式,11位的ID,有效数据长8个字节,8个字节。
CAN ID,DLC,D0,D1,D2,D3,D4,D5,D6,D7我们将这样一组CANOPEN数据叫做一路PDO。
利用CANOPEN组成的网络是一个主从网络,将控制器节点号最小的控制器设置为MASTER,其他的设置为SLA VE,因为控制器的节点号越小,其优先级越高。
如果一个控制器不虚拟节点往总线上发送数据,那么初始化结束后,本控制器往总线上发送4路TPDO:(CANOPEN_START_INIT 、CANOPEN_END_INIT)第一路PDO数据的ID为0X180+控制器的节点号第二路PDO数据的ID为0X280+控制器的节点号第三路PDO数据的ID为0X380+控制器的节点号第四路PDO数据的ID为0X480+控制器的节点号如果是再虚拟一个节点号发送数据,则发送的4路TPDO为:(CANOPEN_ADD_TRANSMIT_NODE_ID)第一路PDO数据的ID为0X180+虚拟控制器的节点号第二路PDO数据的ID为0X280+虚拟控制器的节点号第三路PDO数据的ID为0X380+虚拟控制器的节点号第四路PDO数据的ID为0X480+虚拟控制器的节点号如果是再虚拟一个节点号发送莫一路数据,则发送的PDO为:(CANOPEN_ADD_TRANSMIT_PDO)如果是虚拟第一路PDO数据的ID为0X180+虚拟控制器的节点号如果是虚拟第二路PDO数据的ID为0X280+虚拟控制器的节点号如果是虚拟第三路PDO数据的ID为0X380+虚拟控制器的节点号如果是虚拟第四路PDO数据的ID为0X480+虚拟控制器的节点号假设现在有三个控制器通过CANOPEN总线相连:控制器4 控制器7 控制器104号控制器CANOPEN初始化程序为:4号控制器发送4路PDO数据,发送的数据分别为第1路PDO,ID为0X184,发送%QW200~%QW203地址里的数据第2路PDO,ID为0X284,发送%QW204~%QW207地址里的数据第3路PDO,ID为0X384,发送%QW208~%QW211地址里的数据第4路PDO,ID为0X484,发送%QW212~%QW215地址里的数据4号控制器接收7号控制器发送的4路PDO数据和10号控制器发送的4路PDO数据%IW200~%IW203地址保存7号控制器发送的第1路PDO(ID=0X187)%IW204~%IW207地址保存7号控制器发送的第2路PDO(ID=0X287)%IW208~%IW211地址保存7号控制器发送的第3路PDO(ID=0X387)%IW212~%IW215地址保存7号控制器发送的第4路PDO(ID=0X487)%IW216~%IW219地址保存10号控制器发送的第1路PDO(ID=0X18A)%IW220~%IW223地址保存10号控制器发送的第2路PDO(ID=0X28A)%IW224~%IW227地址保存10号控制器发送的第3路PDO(ID=0X38A)%IW228~%IW231地址保存10号控制器发送的第4路PDO(ID=0X48A)7号控制器CANOPEN初始化程序为:7号控制器发送4路PDO数据,发送的数据分别为第1路PDO,ID为0X187,发送%QW200~%QW203地址里的数据第2路PDO,ID为0X287,发送%QW204~%QW207地址里的数据第3路PDO,ID为0X387,发送%QW208~%QW211地址里的数据第4路PDO,ID为0X487,发送%QW212~%QW215地址里的数据7号控制器接收4号控制器发送的4路PDO数据和10号控制器发送的4路PDO数据%IW200~%IW203地址保存4号控制器发送的第1路PDO(ID=0X184)%IW204~%IW207地址保存4号控制器发送的第2路PDO(ID=0X284)%IW208~%IW211地址保存4号控制器发送的第3路PDO(ID=0X384)%IW212~%IW215地址保存4号控制器发送的第4路PDO(ID=0X484)%IW216~%IW219地址保存10号控制器发送的第1路PDO(ID=0X18A)%IW220~%IW223地址保存10号控制器发送的第2路PDO(ID=0X28A)%IW224~%IW227地址保存10号控制器发送的第3路PDO(ID=0X38A)%IW228~%IW231地址保存10号控制器发送的第4路PDO(ID=0X48A)10号控制器CANOPEN初始化程序为:10号控制器发送4路PDO数据,发送的数据分别为第1路PDO,ID为0X18A,发送%QW200~%QW203地址里的数据第2路PDO,ID为0X28A,发送%QW204~%QW207地址里的数据第3路PDO,ID为0X38A,发送%QW208~%QW211地址里的数据第4路PDO,ID为0X48A,发送%QW212~%QW215地址里的数据10号控制器接收4号控制器发送的4路PDO数据和7号控制器发送的4路PDO数据%IW200~%IW203地址保存4号控制器发送的第1路PDO(ID=0X184)%IW204~%IW207地址保存4号控制器发送的第2路PDO(ID=0X284)%IW208~%IW211地址保存4号控制器发送的第3路PDO(ID=0X384)%IW212~%IW215地址保存4号控制器发送的第4路PDO(ID=0X484)%IW216~%IW219地址保存7号控制器发送的第1路PDO(ID=0X187)%IW220~%IW223地址保存7号控制器发送的第2路PDO(ID=0X287)%IW224~%IW227地址保存7号控制器发送的第3路PDO(ID=0X387)%IW228~%IW231地址保存7号控制器发送的第4路PDO(ID=0X487)如果数据没有改变,则控制器每隔300毫秒发送一次数据,如果数据改变了,则控制器会马上将改变的数据发送到总线上。
永宏CanOpen通讯板说明书

CBCANCANopen通訊模板使用說明書V1.02011/11/7永宏電機股份有限公司目錄 (2)表目錄 (4)圖目錄 (5)1.模板介紹 (7)2.規格 (7)3.硬體安裝及配線 (8)4.PLC應用界面 (9)4.1通訊介面區 (9)4.2應用參數區(Parameter data) (9)4.3程序資料區(Process data) (9)4.4模板狀態區 (10)5.LED狀態指示燈 (10)6.EasyCANopener軟體操作 (12)6.1PLC連接 (13)6.2組態設定 (13)6.2.1建立新組態 (13)6.2.2儲存組態至檔案 (17)6.2.3開啟已建立的組態檔 (18)6.2.4讀取CBCAN模板的組態內容 (18)6.2.5將組態資料寫入CBCAN模板 (19)6.2.6產生電子資料檔 (19)6.2.7結束組態設定 (19)6.3SDO資料存取操作 (19)6.3.1SDO資料讀取 (20)6.3.2SDO資料寫入 (20)6.3.3SDO資料批次處理 (21)6.4PLC遠端監控服務 (23)6.4.1開啟服務 (23)6.4.2使用服務 (24)6.5NMT(網路管理)操作 (24)6.6CBCAN模板韌體更新操作 (25)6.6.1選取韌體檔案 (25)6.6.2開始韌體更新 (25)6.7結束操作 (25)附錄一 (26)1.1應用手冊 (26)1.1.1範例一:將CB C A N連接至一個C A N open主站裝置 (26)1.1.2範例二:將CB C A N連接至一個C A N open從站裝置 (31)附錄二 (37)C BC A N模板的物件字典(O bj ect D i ct i onar y) (37)表1:C B C A N規格 (7)表2:C B C A N端子台訊號 (8)表3:程序資料區 (9)表4:模板狀態區 (10)表5:R U N燈模式 (11)表6:ER R燈模式 (11)表7:R U N燈模式–Si ngl e s t at us i ndi cat or (12)表8:範例–網路設定 (26)表9:範例–網路組態 (32)圖1:C B C A N上視圖 (8)圖2:FB s上視圖 (8)圖3:C A N open l i ne t er m i nat i on (8)圖4:Ter m j um per位置 (9)圖5:燈號閃爍時序 (11)圖6:EazyC A N O pener主畫面 (12)圖7:通訊設定 (13)圖8:組態設定 (13)圖9:R PD O設定 (14)圖10:R PD O突出式選單 (14)圖11:編輯R X PD O (14)圖12:傳輸模式 (16)圖13:TX PD O設定頁面 (16)圖14:雜項設定頁面 (17)圖15:讀取組態的通訊設定 (18)圖16:節點掃描 (18)圖17:搜尋結果視窗 (19)圖18:產生ED S檔案 (19)圖19:SD O服務頁面 (20)圖20:SD O R ead頁面 (20)圖21:SD O W r i t e頁面 (21)圖22:SD O批次處理 (21)圖23:SD O批次處理設定頁面 (21)圖24:批次處理突出式選單 (22)圖25:增加SD O命令 (22)圖26:PLC遠端監控服務 (23)圖27:G at ew ay狀態視窗 (23)圖28:W i nPr ol adder連線設定頁面 (24)圖29:N M T服務 (24)圖30:韌體更新 (25)圖31:韌體資訊 (25)圖32:範例網路 (26)圖33:主頁面 (27)圖34:模組設定畫面 (27)圖35:節點I D設定 (27)圖36:鮑率設定 (27)圖37:刪除R X PD O (28)圖38:R X PD O設定頁面 (28)圖39:此應用的R X PD O1設定 (29)圖40:移除TX PD O (29)圖41:TX PD O設定 (29)圖42:TX PD O傳輸參數設定 (30)圖43:將組態寫入C BC A N (31)圖44:範例網路 (31)圖45:主頁面 (32)圖46:模組組態頁面 (32)圖47:節點I D設定 (33)圖48:鮑率設定 (33)圖49:移除R X PD O (33)圖50:R X PD O設定頁面 (34)圖51:此範例中的R X PD O1設定 (34)圖52:移除TX PD O (35)圖53:TX PD O設定 (35)圖54:TX PD O傳輸參數設定 (36)圖55:將組態寫入到C B C A N (36)CBCAN模板使用說明書1.模板介紹CBCAN模板是永宏FBs PLC系列的通訊模板.使用時可直接裝在CPU模組的擴充板位置即可不佔用額外空間.透過此模板永宏PLC即能與CANopen網路上的其它裝置直接溝通.CANopen是一種架構在CAN bus網路上的通訊協定,已廣泛的應用在各種控制系統中,例如,工業機械控制、車輛控制系統、工廠自動化、醫療設備控制、大樓自動化、遠端資料收集和監控、環境監測...等等.具有安全可靠及反應迅速的優點.2.規格表1:C B C A N規格名稱特性依循標準CAN 2.0A , DS301V4.02PDO數目RPDO最大10個TPDO最大10個SDO數目Server1個Client1個應用參數物件最多1000個暫存器同步Master可規畫NMT Master可操作Time Stamp Consumer錯誤控制Heartbeat通訊速率20K, 50K, 125K, 250K, 500K, 750K, 1M可設定組態設定遠端操作可工具PC軟體EasyCANopener 方法透過PLC通訊埠進行修改遠端PLC程式修改可Vendor ID2EFH信號端子 3 Pin免螺絲端子電氣隔離是電源電壓及耗電流5V, 150mA 工作溫度0 ~ 60℃儲存溫度-20 ~ 80℃3.硬體安裝及配線FBs PLC 主機左側有通訊板專用的擴充槽,CBCAN 通訊板可直接安裝於此擴充槽。
ELCO CANOPEN编码器使用说明书
1、CANopen介绍 (1)2、通信对象 (2)3、CANopen预定义连接集 (3)4、编码器 (5)4.1 编码器说明 (5)4.2 接线说明 (5)4.3 指拨开关说明 (5)4.3.1 节点地址设定 (6)4.3.2 CAN波特率设定 (6)4.3.3匹配电阻设定 (6)4.3.4旋转方向选择 (7)5、Object directory(对象字典) (8)5.1 Detailed description of the communication parameters(通讯子协议区域) (8)5.1.1 Object 1000H: Device type(设备类型) (8)5.1.2 Object 1001H: Error register(错误寄存器) (8)5.1.3 Object 1003H: Predefined error field(预定义错误区域) (8)5.1.4 Object 1005H: COB-ID for SYNC(SYNC标志符) (9)5.1.5 Object 1008H: Manufacturer device name(制造商设备名) (9)5.1.6 Object 1009H: Hardware version(硬件版本) (9)5.1.7 Object 100AH: Software version(软件版本) (9)5.1.8 Object 100CH und 100DH: Guard Time and life time factor(节点保护参数) (9)5.1.9 Object 1010H: Save parameters(保存参数) (10)5.1.10 Object 1011H: restore default parameters(恢复默认参数值) (10)5.1.11 Object 1014H: COB-ID emergency messages(EMCY标志符) (10)5.1.12 Object 1017H: Producer Heartbeat Time(Heartbeat报文周期) (11)5.1.13 Object 1018H: Identity Object(设备ID) (11)5.1.14 Object 1800H: 1.transmit PDO parameter (TXPDO1 异步) (11)5.1.15 Object 1801H: 2.transmit PDO parameter (TXPDO2 同步) (11)5.2 Detailed Description of the Manufacturer(制造商特定子协议区域) (12)5.2.1 Object 2005H: ELCOBits(编码器位数) (12)5.2.2 Object 2006H: SetPosition(硬件置位值) (12)5.2.3 Object 2007H: CLRSelect(置位方式选择) (12)5.2.4 Object 2008H: DIRSelect(方向选择功能选择) (13)5.3 Detailed Description of the General Encoder Parameters(标准的设备子协议区域) (13)5.3.1 Object 6000H: Operating parameters(操作参数) (13)5.3.2 Object 6001H: Mearsuring unit per revolution(每分辨率对应的单位) (13)5.3.3 Object 6002H: Total mearsuring range in mearsuring units(测量单位内的总测量范围) (13)5.3.4 Object 6003H: Preset value(预置值) (14)5.3.5 Object 6004H: Position value (编码器当前位置值) (14)5.3.6 Object 6200H: Cyclic timer(发送测量值间隔时间) (14)5.3.7 Object 6500H: Operating status(操作状态) (14)5.3.8 Object 6501H: SingleTurn resolution(每圈对应的测量值) (14)5.3.9 Object 6507H: Profile and software version(外形和软件版本) (15)5.3.10 Object 6509H: Offset value(偏移值) (15)5.3.11 Object 650BH: Serial number(出厂序号) (15)7、Layer-Setting-Service (LSS) (16)8、注意事项 (18)9、故障排除 (19)附:CANopen报文分析 (20)1、CANopen介绍从OSI网络模型的角度来看同,现场总线网络一般只实现了第1层(物理层)、第2层(数据链路层)、第7层(应用层)。
EPEC CANopen编程手册_V1.0

EPEC CANopen编程手册上海派芬自动控制技术有限公司Shanghai Pal-Fin Automatic Control T echnology Co., Ltd.二〇〇七年八月十四日文 件 状 态文件标识:当前版本: 1.0 作 者:[ ] 草稿文件 [ √ ] 正式文件 [ ] 更改正式文件 [ ] 保密文件完成日期: 2007-08-14版 本 历 史版本/状态作者参与者日期备注1.0 2007-08-14EPEC CANopen编程一、物理层CANopen物理层遵循 ISO 11898标准. 传输速率为 250 kbit/s;二、CANopen 使用标准的CAN 桢,有 11位标识符, 0-8 bytes 有效数据。
ID LEN D0 D1 D2 D3 D4 D5 D6 D78 bit 8 bit 8 bit 8 bit 8 bit 8 bit 8 bit 8 bit 8 bit11bitCAN Message = CAN Frame三、CAN总线串行数据传输CAN分为CAN2.0A和CAN2.0B两种硬件标准,CAN2.0A有11位标识符,而CAN2.0B有11位和29位两种标识符。
CANOpen遵循的是CAN2.0A标准,有11位标识符。
四、主从关系每一个 CANopen 设备都有一个接点号, CANopen网络有一个主接点,可以有多个从接点。
CANopen主接点的作用为:激活网络;停止网络;隔离错误接点EPEC 系统的主从由 CANmoon 设置。
EPEC 系统CANopen主接点的作用是激活网络。
CANopen系统所有接点由 ID号标识。
ID号 范围1..127, 即CANopen 网络最多可以有127 不同的接点。
五、PDO协议PDO = Process Data Object,即CAN信息。
CANopen 设备之间通过PDO 传递信息。
PDO所传输的是工作数据。
PDO (tx) (Transmit PDO)发送者 (CANopen node)发送信息到 CAN 总线上,而接受者根据需要从CAN总线读取信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EPEC控制器CANOPEN使用说明
本CANOPEN采用的标准的CAN数据格式,11位的ID,有效数据长8个字节,8个字节。
CAN ID,DLC,D0,D1,D2,D3,D4,D5,D6,D7
我们将这样一组CANOPEN数据叫做一路PDO。
利用CANOPEN组成的网络是一个主从网络,将控制器节点号最小的控制器设置为MASTER,其他的设置为SLA VE,因为控制器的节点号越小,其优先级越高。
如果一个控制器不虚拟节点往总线上发送数据,那么初始化结束后,本控制器往总线上发送4路TPDO:
(CANOPEN_START_INIT 、CANOPEN_END_INIT)
第一路PDO数据的ID为0X180+控制器的节点号
第二路PDO数据的ID为0X280+控制器的节点号
第三路PDO数据的ID为0X380+控制器的节点号
第四路PDO数据的ID为0X480+控制器的节点号
如果是再虚拟一个节点号发送数据,则发送的4路TPDO为:
(CANOPEN_ADD_TRANSMIT_NODE_ID)
第一路PDO数据的ID为0X180+虚拟控制器的节点号
第二路PDO数据的ID为0X280+虚拟控制器的节点号
第三路PDO数据的ID为0X380+虚拟控制器的节点号
第四路PDO数据的ID为0X480+虚拟控制器的节点号
如果是再虚拟一个节点号发送莫一路数据,则发送的PDO为:
(
CANOPEN_ADD_TRANSMIT_PDO)
如果是虚拟第一路PDO数据的ID为0X180+虚拟控制器的节点号
如果是虚拟第二路PDO数据的ID为0X280+虚拟控制器的节点号
如果是虚拟第三路PDO数据的ID为0X380+虚拟控制器的节点号
如果是虚拟第四路PDO数据的ID为0X480+虚拟控制器的节点号
假设现在有三个控制器通过CANOPEN总线相连:
4
4号控制器发送4路PDO数据,发送的数据分别为
第1路PDO,ID为0X184,发送%QW200~%QW203地址里的数据
第2路PDO,ID为0X284,发送%QW204~%QW207地址里的数据
第3路PDO,ID为0X384,发送%QW208~%QW211地址里的数据
第4路PDO,ID为0X484,发送%QW212~%QW215地址里的数据控制器4 控制器7 控制器10
4号控制器接收7号控制器发送的4路PDO数据和10号控制器发送的4路PDO数据%IW200~%IW203地址保存7号控制器发送的第1路PDO(ID=0X187)
%IW204~%IW207地址保存7号控制器发送的第2路PDO(ID=0X287)
%IW208~%IW211地址保存7号控制器发送的第3路PDO(ID=0X387)
%IW212~%IW215地址保存7号控制器发送的第4路PDO(ID=0X487)
%IW216~%IW219地址保存10号控制器发送的第1路PDO(ID=0X18A)
%IW220~%IW223地址保存10号控制器发送的第2路PDO(ID=0X28A)
%IW224~%IW227地址保存10号控制器发送的第3路PDO(ID=0X38A)
%IW228~%IW231地址保存10号控制器发送的第4路PDO(ID=0X48A)
7号控制器CANOPEN初始化程序为:
7号控制器发送4路PDO数据,发送的数据分别为
第1路PDO,ID为0X187,发送%QW200~%QW203地址里的数据
第2路PDO,ID为0X287,发送%QW204~%QW207地址里的数据
第3路PDO,ID为0X387,发送%QW208~%QW211地址里的数据
第4路PDO,ID为0X487,发送%QW212~%QW215地址里的数据
7号控制器接收4号控制器发送的4路PDO数据和10号控制器发送的4路PDO数据%IW200~%IW203地址保存4号控制器发送的第1路PDO(ID=0X184)
%IW204~%IW207地址保存4号控制器发送的第2路PDO(ID=0X284)
%IW208~%IW211地址保存4号控制器发送的第3路PDO(ID=0X384)
%IW212~%IW215地址保存4号控制器发送的第4路PDO(ID=0X484)
%IW216~%IW219地址保存10号控制器发送的第1路PDO(ID=0X18A)
%IW220~%IW223地址保存10号控制器发送的第2路PDO(ID=0X28A)
%IW224~%IW227地址保存10号控制器发送的第3路PDO(ID=0X38A)
%IW228~%IW231地址保存10号控制器发送的第4路PDO(ID=0X48A)
10号控制器CANOPEN初始化程序为:
10号控制器发送4路PDO数据,发送的数据分别为
第1路PDO,ID为0X18A,发送%QW200~%QW203地址里的数据
第2路PDO,ID为0X28A,发送%QW204~%QW207地址里的数据
第3路PDO,ID为0X38A,发送%QW208~%QW211地址里的数据
第4路PDO,ID为0X48A,发送%QW212~%QW215地址里的数据
10号控制器接收4号控制器发送的4路PDO数据和7号控制器发送的4路PDO数据%IW200~%IW203地址保存4号控制器发送的第1路PDO(ID=0X184)
%IW204~%IW207地址保存4号控制器发送的第2路PDO(ID=0X284)
%IW208~%IW211地址保存4号控制器发送的第3路PDO(ID=0X384)
%IW212~%IW215地址保存4号控制器发送的第4路PDO(ID=0X484)
%IW216~%IW219地址保存7号控制器发送的第1路PDO(ID=0X187)
%IW220~%IW223地址保存7号控制器发送的第2路PDO(ID=0X287)
%IW224~%IW227地址保存7号控制器发送的第3路PDO(ID=0X387)
%IW228~%IW231地址保存7号控制器发送的第4路PDO(ID=0X487)
如果数据没有改变,则控制器每隔300毫秒发送一次数据,如果数据改变了,则控制器会马上将改变的数据发送到总线上。
如一个WORD的地址为%QW200,则一个字节的地址为%QB400。
既%QW200的地址和%QB400的地址是一样的。
4号控制器发送的第一路PDO,将%QW200~QW203的4个WORD的值发送到总线上,
%QW200=0834H
%QW201=005FH
%QW202=014AH
%QW203=0001H
则数据发送的是将一个WORD分成2个BYTE发送,拆分的方法是低字节在前,高字节在后。
ID=0X184,DLC=8,D0=34H,D1=8H,D2=5FH,D3=0H,D4=4AH,D5=1H,D6=1BH,D7=0H。
如果从地址考虑,发送的数据为:
ID=0X184,DLC=8,D0=%QB400,D1=%QB401,D2=%QB402,D3=%QB403,D4=%QB404,D5=%QB405,D6=%QB406,D7=%QB407
关于数据的接收:%IW200的地址和%IB400的地址是一样的。
如7号控制器接收4号控制器的第一路PDO,7号控制器接收4号控制器的第一路PDO保存在IW200~IW203里面。
%IW200保存的是4号控制器%QW200发送的数据。
%IW201保存的是4号控制器%QW201发送的数据。
%IW202保存的是4号控制器%QW202发送的数据。
%IW203保存的是4号控制器%QW203发送的数据。
其他以次类推。
枯藤老树昏鸦,小桥流水人家,古道西风瘦马。
夕阳西下,断肠人在天涯。