小车走迷宫程序
智能小车中的迷宫算法
智能小车中的迷宫算法2008-10-27 15:20智能小车中的迷宫算法看了周立功上面的电脑鼠走迷宫的视频感觉非常有趣,一直都做个小车玩,可没材料,只能看着视频上的小车路行轨迹整出来了这个算法,我不知道真正的算法是怎么实现的,这只是我自己想的一个算法,而且没有完整的小车程序,有空买了小车的再整理总程序。
/pro_ydkz/MicroMouse615.asp这是视频地址。
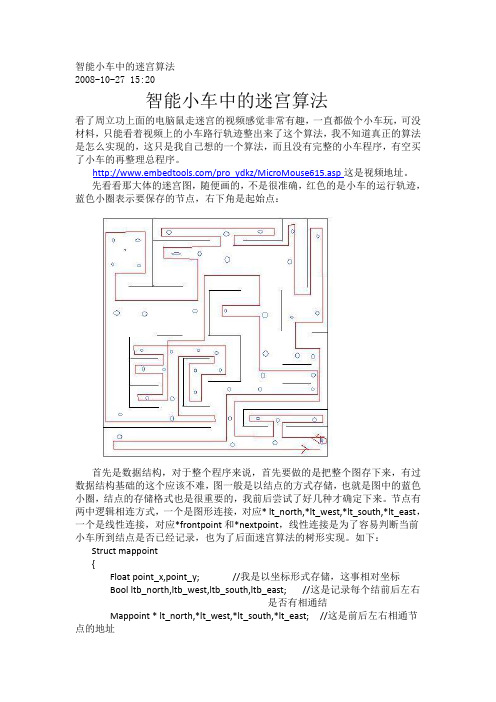
先看看那大体的迷宫图,随便画的,不是很准确,红色的是小车的运行轨迹,蓝色小圈表示要保存的节点,右下角是起始点:首先是数据结构,对于整个程序来说,首先要做的是把整个图存下来,有过数据结构基础的这个应该不难,图一般是以结点的方式存储,也就是图中的蓝色小圈,结点的存储格式也是很重要的,我前后尝试了好几种才确定下来。
节点有两中逻辑相连方式,一个是图形连接,对应* lt_north,*lt_west,*lt_south,*lt_east,一个是线性连接,对应*frontpoint和*nextpoint,线性连接是为了容易判断当前小车所到结点是否已经记录,也为了后面迷宫算法的树形实现。
如下:Struct mappoint{Float point_x,point_y; //我是以坐标形式存储,这事相对坐标Bool ltb_north,ltb_west,ltb_south,ltb_east; //这是记录每个结前后左右是否有相通结Mappoint * lt_north,*lt_west,*lt_south,*lt_east; //这是前后左右相通节点的地址Mappoint *frontpoint,*nextpoint; //这是前一结点和后一结点的地址}看着很简单,但他确实很简单,但你也得尝试几次才会知道怎样组织最合适。
下面是算法了,首先是程序的流程,可怜的我到现在还没用过超声波传感器和伺服电机,所以只能假设了,伺服电机貌似得用时钟中断控制,超声波假设也是轮询寄存器。
幼儿园托班小车迷宫教案

幼儿园托班小车迷宫教案教案主题:幼儿园托班小车迷宫教学教学目标:1. 帮助幼儿培养观察能力和动手能力,提高解决问题的能力。
2. 培养幼儿的团队协作意识,提高社交能力。
3. 培养幼儿的自信心和勇气。
教学内容:1. 基本介绍迷宫和小车。
2. 小车在迷宫中寻找出口的方法。
教学准备:1. 迷宫模型2. 小车模型教学过程:1. 基本介绍迷宫和小车。
首先,让幼儿们看一下迷宫模型,包括出口、入口和迷宫的路线。
然后简单介绍小车模型,告诉孩子们我们要帮忙小车找到出口,但是小车只能沿着迷宫的路走。
2. 小车在迷宫中寻找出口的方法。
把孩子们分成几个小组,每个小组有一个小车和一个迷宫模型。
然后告诉孩子们应该如何操作小车,在迷宫里寻找出口。
可以告诉孩子们一些技巧,比如怎样先走直线,然后转弯。
讲解过后,让孩子们自己操作小车,看看能不能将小车驶出来。
在这个过程中,老师需要引导孩子们去想象,鼓励他们思考解决方案。
如果孩子们遇到困难,可以给他们提示。
3. 团队协作与社交能力将小组中的幼儿组合起来,让他们一起来探索迷宫,找寻出口。
在这个过程中,老师需要引导孩子们彼此之间互相帮忙、鼓励,并教育他们坚持不懈、共同合作,能够战胜任何困难。
4. 勇气和自信心如果孩子们在操作小车时遇到失败了,老师要及时给他们鼓励,并告诉他们失败不代表一切。
让他们安心再次操作小车,并告诉他们坚持不带来绝望,最终他们一定能够找到出口。
教学总结:通过这个活动,孩子们学到了如何去解决问题、如何去合作,并且培养了他们的勇气和自信心。
同时,这个小车迷宫游戏也为幼儿课堂注入了新的色彩,让孩子们更加有趣地学习。
走迷宫——【EV3 精品讲义】
首先开始搭建安装传感器吧~ 想一想前几课学到搭建方法
完整迷宫程序:
扩展讨论: 走出迷ቤተ መጻሕፍቲ ባይዱ后怎么停车呢?
提示:可以在出口添加 彩色线做标记
循环中断模块:
用于中断一个循环模块,或当有多个循环模块时,指定某个循环中断
活动--走迷宫
小朋友们走过迷宫吗? 觉得好走吗? 你们都见过什么样的迷宫呢?
咱们玩一个走迷宫的游戏吧?
现实中的迷宫是看不到全局的, 如果你面临着一个迷宫 有什么好方法吗?
入口
分析下这个简单的迷宫 怎么能让你的机器人小车顺利完成?
出口
简单迷宫动作分析: 1: 靠左,或右墙行走(超声波传感器) 2: 遇到障碍物转直角90度(触碰传感器)
计算机控制小车走迷宫使用说明
计算机控制小车走迷宫使用说明
电源科技创新3 M24组
一系统要求
使用该软件的计算机必须有两个以上USB接口,USB转RS232必须对应COM1口,系统内需要VC的运行库,OpenCV库。
并且还需要一个摄像头。
硬件上小车无线收发与机械控制应完好。
二安装与准备
电脑端源程序与可执行文件均包含,即可直接执行,也可自行编译。
小车端程序请先编译,然后烧录进小车单片机内。
小车接8V电源。
USB摄像头与串口通讯线也应接好。
三使用
1.将摄像头对准迷宫,启动程序,在VIEW窗口中调整摄像头位置与角度使迷宫出口位于屏幕边缘,调整光线与摄像头焦距,使迷宫颜色分明。
2.将鼠标移动到小车出发的起始位置,按任意键,开始寻找出路。
留意字符窗口的显示,若提示no way 表示没有找到,请换一个方向再试。
找到路径后在VIEW窗口上会绘制出出路的方向与路径,此时VIEW窗口保持不变。
3。
此时请转换到CamShift窗口,在此窗口内按住鼠标左键圈定小车最明显部分,以便跟踪。
4。
确定小车位置后,字符窗口上会有当前发送命令的显示,但实际并未发送,此时按s键开始发送命令,按p键停止发送。
5.小车在接受有效命令后,绿灯会闪烁,同时小车会按照发出的命令进行行动。
幼儿园迷宫操作方法

幼儿园迷宫操作方法
1.准备工作
将迷宫板放在平坦的桌面或地上,把迷宫道具按照题目要求摆放好。
2.游戏目标
根据题目要求,使小球或者小车从起点走到终点,不触碰到迷宫的墙壁。
3.游戏规则
玩家通过手把迷宫板倾斜来控制迷宫中的小球或小车运动,不要将球或车掉入“陷阱”或碰到“障碍”。
当小球或小车到达终点后,游戏成功,可以开始下一关,否则需要重新开始。
4.游戏技巧
(1)观察题目要求,清楚起点和终点,找出可行的路线,避免无用的尝试。
(2)通过倾斜迷宫板控制小球或小车的方向,注意不要过度力度,以免球或车掉出迷宫。
(3)注意观察迷宫中的墙壁和“陷阱”,避免路线错乱或掉入“陷阱”。
5.游戏结束
当小球或小车到达终点后,游戏成功,可以进行下一关,或者结束游戏。
如果中途游戏失败,可以重新开始。
小车走迷宫ppP

微机原理与接口技术实训实验报告(小车走迷宫)所属系部:电气信息工程系班级:通信技术姓名:指导老师:摘要本次所做的课题是小车走迷宫。
即通过编程使小车在事先准备的迷宫中行走,通过小车上安装的红外模块对迷宫障碍的判断来改变小车的前进方向,使小车在不碰撞迷宫挡板的情况下,用最短时间走出迷宫。
小车使用Philips公司生产的P89V51增强型芯片,用汇编语言进行程序编写,传感器使用红外发射接收模块。
对每个红外模块的发射距离要在迷宫当中进行适当的调整,使红外模块的探测距离刚好,从而更好地判断小车的当前状态,红外模块分别安装在小车的左、右、前方,用一个端口发射,然后分别接收。
将每个端口接收的数据,存放后再比较,根据自己编写的程序,使小车接收的数据有对应的动作。
在这次课题所使用的迷宫地图中,有四个“丁”字路口,因此在单片机编程中,我们通过一个寄存器如 R7对“丁”字路口的个数进行计数。
然后将所计的数据值与自己所设置数据进行判断,满足自己所设定的数据,就给小车对应的动作,使小车顺利走过每个“丁”字路口。
关键字:迷宫;红外发射接收模块;“丁”字口计数目录第一章整体阐述.......................................................... - 4 -1.项目要求............................................................. - 4 -2.解决方法............................................................. - 5 -3.流程图............................................................... - 5 - 第二章硬件描述.......................................................... - 8 -1.硬件电路............................................................. - 8 -1.1复位监控电路、时钟振荡电路、二极管显示.......................... - 8 -1.2声控电路........................................................ - 8 -1.3通信电路........................................................ - 9 -1.4按键及显示...................................................... - 9 -1.5模块与电机接口................................................. - 10 -1.6传感器部分..................................................... - 10 -1.7电机驱动与电源................................................. - 11 -2.主要功能描述........................................................ - 11 -2.1单片机......................................................... - 11 -2.2传感器......................................................... - 12 -2.3驱动部分....................................................... - 13 -2.4驱动子程序..................................................... - 15 -2.5总体功能....................................................... - 16 - 第三章程序清单......................................................... - 17 - 第四章总结............................................................. - 20 -1、总结1 ............................................................. - 20 -2、总结2 ............................................................. - 21 - 第五章参考文献......................................................... - 22 -第一章整体阐述1.项目要求使用计算机编程软件keil uvision编写小车单片机程序,单片机使用Philips公司生产的P89V51RD2XX增强型芯片,在小车上加装3—5个红外发射接收模块,通过红外模块发射接收红外线来判断迷宫的障碍位置,然后将判断的结果与实际迷宫状况相结合,根据迷宫的状态在程序中给予正确的小车行进动作,小车驱动使用PWM调速,使小车成功的避开迷宫障碍,走出迷宫。
F智能迷宫小车

F题智能迷宫小车【本科组】一、任务设计并制作一个智能迷宫小车,小车能在迷宫中自动从起点寻找路线走到终点。
二、要求1.基本要求(1)电动小车必须是自动的,不能使用遥控器,启动后不能再改变策略;(2)电动小车从起点出发,能在迷宫中自动直行、转弯、后退;(3)电动小车从起点出发,能在迷宫中按上图布局对各路径遍历,并自动走到终点;(4)电动小车到达终点后能有明显的声或光提示;(5)电动小车从起点到终点的时间不超过8分钟;2.发挥部分(1)电动小车从起点到终点的时间不超过3分钟。
(2)提高小车速度和让小车不碰壁,缩短从起点到终点的时间。
(3)改变迷宫布局,电动小车可以从起点开始对迷宫搜索一遍以后回到起点,然后从起点开始,电动小车能选择最佳路径以最快速度到达终点,整个过程时间不超过5分钟。
(4)其他。
三、说明(1)迷宫由8×8个﹑22cm×22cm大小的正方形单元所组成,迷宫布局可变。
(2)迷宫的隔墙高10cm,厚1.2~1.6cm,隔墙建议采用三合板制作,隔墙单元尺寸为22*10*1.2cm,两个隔墙所构成的通道的实际宽度为22-1.6=20.4cm。
隔墙将整个迷宫封闭。
(三合板的厚度在1.2-1.6cm之间选择,但两个隔墙之间的宽度不小于20.4cm。
图中方格细线在测试时没有的,只是为了说明方便)(3)迷宫隔墙的侧面为白色,迷宫的地面为黑色,在迷宫终点处离地5cm高度有一点亮的红色发光二极管,做为辅助识别终点的标志。
(4)一旦竞赛迷宫的布局揭晓,操作员不能将任何有关迷宫布局的信息再传输给电动小车。
(5)当比赛官方认为某电动小车的运行将破坏或损毁迷宫时,有权停止其运行或取消其参赛资格。
(6)小车哪外届不得有任可连线,不得采用人工遥控,起动后不得再操作小车。
四、评分标准。
幼儿园创意编程天地:图形编程小车走迷宫教学案例

幼儿园创意编程天地:图形编程小车走迷宫教学案例随着现代科技的迅猛发展,编程教育已经成为了教育界的热门话题之一。
越来越多的学校和机构开始注重培养学生的编程能力,而幼儿园作为学生教育的起点,也在不断尝试着将编程教育融入到幼儿教学中,以培养孩子们的逻辑思维能力和创造力。
而图形编程小车走迷宫教学作为一种创意编程教学方法,正在引起越来越多幼儿园的关注和实践。
1. 初识编程幼儿园是孩子们的乐园,而在这样一个充满童真和好奇心的地方,引领孩子们初识编程无疑是一项极富创意和思考的工作。
而图形编程小车走迷宫教学正是一种引导幼儿初识编程的切入点。
这种教学方法通过以有趣的方式引导孩子们解决问题,培养他们的逻辑思维和动手能力,同时也为他们打开了编程的大门,激发了孩子们对编程的兴趣。
2. 图形编程小车走迷宫在幼儿园创意编程天地中,图形编程小车走迷宫无疑是一个颇具魅力的活动。
在这个教学案例中,孩子们将通过编程操控小车,让它按照特定的路径走出迷宫。
这不仅培养了孩子们对空间和方向的认知能力,更重要的是,通过创意编程教学,孩子们可以在动手实践中感受编程的乐趣,同时也能锻炼他们的逻辑思维和问题解决能力。
3. 案例分析在图形编程小车走迷宫教学案例中,老师可以先通过讲解迷宫的结构和小车的控制原理,引导孩子们思考如何让小车走出迷宫。
老师可以带领孩子们使用图形编程软件,通过拖拽和组合编程模块,让小车按照他们设计的路径行进。
在这个过程中,孩子们需要思考每一步的行动,培养他们对问题的分析和解决能力。
当小车成功走出迷宫时,孩子们会获得成就感和满足感,同时也为他们今后的编程学习打下了良好的基础。
4. 个人观点作为一名幼儿园的文章写手,我深信图形编程小车走迷宫教学案例对于幼儿园编程教育的重要性。
这种教学方法既能培养孩子们的逻辑思维和动手能力,又能在有趣的编程实践中引导孩子们初识编程,激发他们对编程的兴趣。
在幼儿园创意编程天地中,这样的教学案例将会成为一种创意和有趣的教学方式,让幼儿们在快乐中学习,为未来的学习和生活奠定坚实的基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
//这是迷宫小车传感器测试小程序
#include <mega8515.h>
#include <delay.h>
#include <stdio.h>
bit front;
bit L=1; //红外线检测到阻挡为 0
bit R=1;
// Timer 0 overflow interrupt service routine
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
{
//产生红外线传感器发射所要的交流信号(频率:50mhz ~ 500mhz) TCNT0=225;
PORTB.0=!PORTB.0;
PORTB.2=!PORTB.2;
PORTB.4=!PORTB.4;
}
// Timer 1 overflow interrupt service routine
interrupt [TIM1_OVF] void timer1_ovf_isr(void)
{
//检测装在PB.5口上的传感器
if(PINB.5){ R=0; PORTA=0xff; }
if(PINB.1){ L=0; PORTA=0xff; }
}
/*******************************************
// 蜂鸣器BB程序
*/////////////////////////////////////////// void buzzer(void)
{ unsigned int i=512;
for(;i--;) { PORTB.3=!PORTB.3; delay_us(250); } }
/*******************************************
// 小车“杀车”程序
*/////////////////////////////////////////// void black(void)
{
PORTD.6=!PORTD.6;
PORTD.4=!PORTD.4;
delay_ms(30);
OCR1AL=0; OCR1BL=0;
delay_ms(100);
}
/*******************************************
// 小车启动子程序
// speed=0~255 0为停止走动
// front=1 ,向前 front=0, 向后
*////////////////////////////////////////////// void RUN(unsigned char speed)
{ OCR1AL=speed;
OCR1BL=speed;
if (front) {PORTD.6=1; PORTD.4=1; }
else { PORTD.6=0; PORTD.4=0; }
}
/*********************************************
//转圈子程序
// p=‘R’垂直右转,p='L' 垂直左转,
// p='r' 以右轮为支点右转,p='l'以左轮为支点左转// m转向数值
*//////////////////////////////////////////////// void L_R(unsigned char p,unsigned char m)
{ unsigned char a_temp, b_temp;
switch ( p )
{
case 'R' : { PORTD.6=1; PORTD.4=0; while (m--)delay_ms(10); break; } case 'L' : { PORTD.6=0; PORTD.4=1; while (m--)delay_ms(10); break; } case 'r' : { PORTD.6=1; PORTD.4=0;
OCR1AL=0x00; while (m--)delay_ms(10); break; }
case 'l' : { PORTD.6=0; PORTD.4=1;
OCR1BL=0x00; while (m--)delay_ms(10); break; }
}
black();
OCR1AL=a_temp; OCR1BL=b_temp;
}
void test232(void)
{ //unsigned char i;
putchar(0x0d);
putchar(0x0a);
putchar(0x0d);
putchar(0x0a);
putsf("***********************************************\r");
putsf("* RB-101 机器人测试程序 *\r");
putsf("* *\r");
putsf("* 逻辑电子DIY 机器人制作天地 *\r");
putsf("* *\r");
putsf("* 简易灭火测试 *\r");
putsf("***********************************************\r");
//putsf("按任何一个键继续\r");
//i=getchar();
//putchar(i);
putchar(0x0d);
putchar(0x0a);
}
void main(void)
{
PORTA=0x00;
DDRA=0xff; //打开七段数码管,全部点亮
PORTB=0x00;
DDRB=0B00011101; //设置红外线传感器端口
PORTC=0x00;
DDRC=0xff;
PORTD=0b01010000;
DDRD=0b01110000;
PORTE=0x00;
TCCR0=0x04;
TCNT0=0x00;
OCR0=0x00;
TCCR1A=0xA1;
TCCR1B=0x03;
TCNT1H=0xff;
TCNT1L=0xff;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
EMCUCR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART Receiver: On
// USART Transmitter: On
// USART Mode: Asynchronous
// USART Baud rate: 9600
UCSRA=0x00;
UCSRB=0x18;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0x1A;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off // Analog Comparator Output: Off
ACSR=0x80;
#asm("sei")
//打开所有的前后LED
PORTB.6=1;
PORTB.7=1;
PORTC.6=1;
PORTC.7=1;
delay_ms(1000);
PORTA=0;
test232();
buzzer(); //蜂鸣器 delay_ms(100);
buzzer();
delay_ms(1000);
front=1; //前进
RUN(255); //开始行走 delay_ms(1000);
L=R=1;
while(1)
{ while(R*L);
if(!L) L_R('L',50);
if(!R) L_R('R',50); RUN(255);
R=1;L=1;PORTA=0;
#asm("wdr");
}
// run(0); //停止。