履带式行走机构设计分析和研究
毕业设计(论文)开题报告-履带式行走底盘设计

湖南农业大学全日制普通本科生毕业论文(设计)开题报告学生姓名学号年级专业及班级2009级汽车服务工程(1)班指导教师及职称学院工学院20 年月日毕业论文(设计)履带式行走底盘设计题目文献综述(选题研究意义、国内外研究现状、主要参考文献等,不少于1000字)1.履带式行走底盘设计研究意义履带式底盘的结构特点和性能决定了它在农田机耕作业中具有明显的优势。
履带式底盘的拖拉机不会对翻耕过的土壤造成多次反复的碾压,而轮式底盘在整地和耙地作业时轮胎在翻耕过的土壤上反复碾压,造成对土壤的多次压实,不利于播种后种子的生长发育。
因此,研究履带底盘的性能具有极其重要的意义。
下面我们以履带式拖拉机为例来加以解释说明。
履带式拖拉机的接地比压相对较低,从 51.8kW 到 118.4 kW 的各型拖拉机的接地比压为 30~50kPa,而同级别的轮式拖拉机接地比压要大的多。
以 96.2 kW 拖拉机为以例: 东方红 1302 履带机接地比压(装推土铲)为 47.7kPa;东方红1304 轮式机的接地比压约为104 kPa,相当于履带拖拉机的二倍多计。
无论是整地耙地作业还是播种作业履带式拖拉机比轮式拖拉机都占有绝对优势。
几乎所有山区种植粮油作物的农户毫无例外的选择履带式拖拉机。
2.履带式行走底盘设计的国内外研究状况底盘的作用是支承、安装发动机及其各部件、总成,形成车辆的整体造型,并动力,使整车产生运动,保证正常行驶。
在国外,履带式行走底盘研发较早。
1986 年 W. C. Evans 和 D. S. Gove 公布了在硬地面和已耕地上,1种橡胶履带与1种四轮驱动拖拉机牵引性能的实验结果。
在相同的底盘结构情况下,橡胶履带牵引效率与动态牵引比高,在已耕地和硬地面上其最大牵引效率是 85%~90%,四轮驱动拖拉机是70%~85%。
此后又有许多橡胶履带拖拉机与四轮驱动拖拉机性能试验的研究。
国外生产的履带拖拉机在技术水平、生产能力等性能方面具备较强的竞争能力。
悬臂式掘进机履带行走机构主要参数的确定
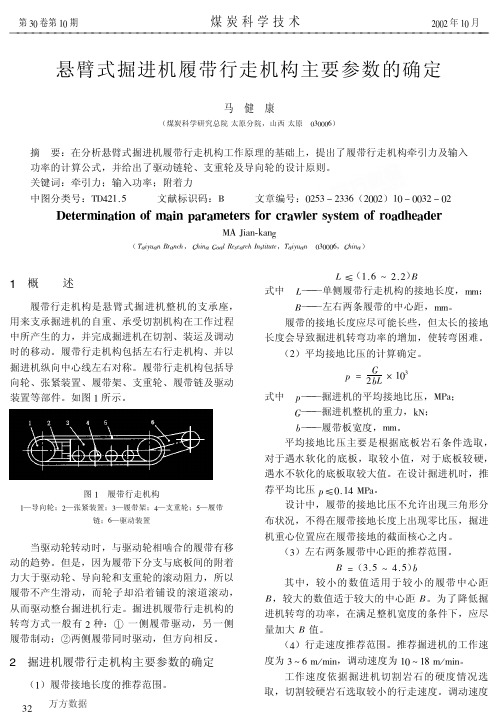
当驱动轮转动时,与驱动轮相啮合的履带有移 动的趋势。但是,因为履带下分支与底板间的附着 力大于驱动轮、导向轮和支重轮的滚动阻力,所以 履带不产生滑动,而轮子却沿着铺设的滚道滚动, 从而驱动整台掘进机行走。掘进机履带行走机构的 转弯方式一般有 ’ 种: ! 一侧履带驱动,另一侧 履带制动;"两侧履带同时驱动,但方向相反。
应尽可能大些,以降低掘进机辅助工作时间,但速 度太高,会导致驱动功率的增大。 (!)张紧装置行程的推荐范围。张紧装置的行 程应大于履带节距的一半,以便在履带因磨损而伸 长时,可拆去块而继续使用。张紧装置的行程一 般为 "#$! % &#’! 个履带节距。 (()单侧履带行走机构牵引力的计算确定。履 带行走机构的最小牵引力应满足掘进机在最大设计 坡度上作业、爬坡和在水平路面上转弯等工况的要 求,最大牵引力应小于在水平路面履带的附着力。 一般情况下,履带行走机构转弯不与掘进机作业、 爬坡同时进行,而掘进机在水平地面转弯时,单侧 履带的牵引力为最大,故单侧履带行走机构的牵引 力的计算以此为依据。 %& & ( ) ) ’ !& " #& $ ! )’ &’ #& " %& * 式中 — —单侧履带行走机构的牵引力, *+; !&— — —单侧履带对地面的滚动阻力, *+; #&— — —履带与地面之间滚动阻力因数,"#", *— % &#"; — —履带 与 地 面 之 间 的 转 向 阻 力 因 数, !— "#, % "#&"; — —掘进机重心与履带行走机构接地形心 )— 的纵向偏心距离,--; — —单侧履带行走机构承受的掘进机的重 %&— 力, *+。 ($)单侧履带行走机构输入功率的计算确定。 + " !& , -"& "’ 式中 — —单侧履带行走机构的输入功率, *.; +— — —履 带 行 走 机 构 工 作 时 的 行 走 速 度, ,— - / 0; — —履 带 链 的 传 动 效 率。有 支 重 轮 时 取 "& — "#,1 % "#1’, 无 支 重 轮 时 取 "#$& % "#$); — —驱动装置减速器的传动效率, 2。 "’ — (,)履带对地面附着力校核计算。单侧履带行 走机构的牵引力心须大于或等于各阻力之和,但应 小于或等于单侧履带与地面之间的附着力。 !& 3 % &#,附着系数值 # 根据表 & 选取。 (1)张紧装置预张力的计算确定。 !" " ./ ’ - ) 0
悬臂式掘进机履带行走机构的设计
ABS TRA CT:By u s i n g t h e we a t h e r c i r c u l a t i o n s i t ua t i o n a n d v a r i o u s p hy s i c a l ie f l d s’ c h a r a c t e r i s t i c s , t h i s p a pe r a n a l y z e s a
气系统等部分组成 ,掘进机 由截割机构 的电机经过二级行 星减 速机驱动截割头进行截煤作业 ,截割臂 由液压系统 的升降油缸
和 回转油缸控制 ,进给作业 由行走机构的液压马达驱动履带来 实现 , 机器作业 时的支撑 由装 载机构 的铲板 和后 支撑 完成 , 截割
有西南 风急流存 在 ; 三 是从强降水 时段的涡度场 、 散度场 、 垂 直
速度场等物理量场看出 , 我市 西北 部为 辐合 区 , 这些参数 和降水
西部 为一 2 0 x 1 0 h P a / s , 也说 明西部为上升运动。
( 4 ) 从红外云图看出 , 7月 2 1日 8 时 1 5分 , 我市范 围有很强
量大小分布落 区吻合较好。
对于天气预报而言 , 日本降水传真 图和德 国数值 预报 场对
山西科技 文章编号 : 1 0 0 4 — 6 4 2 9 ( 2 0 1 3 ) 0 6 — 0 0 61 — 0 4
履带式掘进机行走机构英文参考文献

履带式掘进机行走机构英文参考文献参考文献:1. Zhang, Y., Liu, C., Hu, X., Li, J., & Yan, X. (2017). Research on the bearing capacity of walking chassis based on multibody dynamics simulation. Journal of Vibroengineering, 19(3), 2116-2134.这篇研究基于多体动力学模拟,探讨了履带式掘进机的行走机构的承载能力。
通过建立多体动力学模型,对行走机构的受力分析和承载能力进行了研究,为行走机构设计和优化提供了理论依据。
2. Li, H., Chen, Y., Bai, L., & Zhang, H. (2019). Crawler walking mechanism kinematics and dynamics analysis of coal mine roof bolting rig. Journal of Mining and Safety Engineering, 36(1), 96-102.这篇论文对煤矿顶板支护钻孔机的履带行走机构进行了运动学和动力学分析。
通过建立机构的运动学和动力学模型,研究了履带行走机构的运动规律和受力情况,为机构的设计和控制提供了基础。
3. Wu, X., Dong, F., & Li, C. (2013). Analysis of the steering mechanism of the crawler walking chassis. Mining & Processing Equipment, 41(1), 75-78.本文对履带式掘进机行走机构的转向机构进行了分析。
通过研究转向机构的结构和工作原理,分析了其转向机构的动作规律和影响因素,为转向机构的设计和控制提供了参考。
履带式行走机构设计分析

低重心 。在设计时 ,应注意使 导向轮前 履 带 式 行 走 机 梅 设 计 分 析 调整 范 围 超 过 履 带 节 距 的一 半 , 当 、后移 动的 因 履 带
磨 损 节 距 变 长 时 ,可 取 下 1节 履 带 板 ,仍 能 保 持 履 带 的 张 紧度 。
履 带板 的宽度 取决于工作 条件所要求 的平均接地 比
压 ,宽度越大 , 接地 比压越小 。 一般参照计算公式为 :b =
(. ~ . )× 29× 4 09 11 0 0 0 √G,式中,b为履带宽度 ;G 为
开 发与研究
摘 要 :履带式i 走机构是大型机械整机 的 J :
12 驱 动 轮 . 驱 动 轮 的 齿数 一 般 选 为 奇 数 , 目的 是 使 驱
支承件 ,用 来支承整机的 节 ,承受机构在作业 过程 中产生作 用力 , 完成 机} 进 、后退 、转 J
动轮各齿轮流与节销 啮合 ,增加使用寿命。
冲弹簧预紧力参照计算式为:P (. 0 )G,式中,P O = . 8 v
为 弹 簧 预 紧 力 ; G 为机 体 自重 。 14 支 重轮 .
ห้องสมุดไป่ตู้
支重轮的个数和布置应有利于使履带接地压力分布均 匀。 因此, 在履带作业机械上均采用 直径较 小的多个支重 轮 ,支重轮的个数随车辆功率 ( 机重)的增加而增多 。 但
及转 向功 能 。
翟
机
布置在前还是在后与传动系的布置有关。驱动
轮 中 心 高 度 应 有 利 于 降低 重 心 ( 车 身 )高 度 或
厂
和 增加履带接地长度 ,改善附着 性能 。因此驱 动轮高度应尽量小 。 13 导 向轮和张紧装置 . 导 向轮 的前 后 位 置 根 据 驱动 轮 位 置 而定 , 通 常布 置在 前面 。引导轮 中心 离地 高度应 有利降
履带式挖掘机结构及原理

34
挖掘机械研究所
5.5.3、阀
35
挖掘机械研究所
P2
P1
右行走
直线行走
可选
左行走
铲斗
回转
动臂1
动臂2
斗杆2
斗杆1
36
挖掘机械研究所
1 2 3 4 5 6 7 8
16
挖掘机械研究所
C、回转支承漏黄油 原因:润滑脂、内外圈间隙太大、防尘圈太松 润滑脂:粘度低-泄露,要求3号锂基脂 内外圈间隙太大:(工作时上车晃动较大-可视测)-漏油-更换回转支承 防尘圈(橡胶圈)太松:橡胶老化、断裂或装配间隙太大-更换
17
挖掘机械研究所
D、支重轮漏油
原因:浮封环制品不良、泥沙或冰水使浮封环固结、O型圈老化 黄油嘴装配 检查:若发现O型圈严重磨损-使用中进入水、泥沙等经冻结或挤压 -O型圈与浮封环发生相对转动O型圈磨损-指导用户在湿地工况作业完后在 硬路面上行走,几分钟以将内部水分泥砂从壳体间隙处抖出(或空转)-更换支重轮 黄油嘴装配:生药带或打胶重新装配
46
挖掘机械研究所
- 先导油路
Px 压力 ↑
- 主油路
- 斗杆合流,流量增大,速度加快
ARM DUMP
47
挖掘机械研究所
斗杆回收 - 先导压力
Px 压力 ↑, 保持阀打开 流量再生
X架拼焊结构—9T、15T、22T、33T
分体式结构—45T
14
挖掘机械研究所
5.1.4 典型故障
A、回转异响
原因:回转马达、回转减速机、回转支承 检查步骤:
掘进机履带式行走机构的研究_杨春海

行走机构制造成本低, 无链距 误 差 , 机 体 在 行 走 中 稳 定 , 安 装 、维
修方便, 但由于其滑动形式产生摩擦阻力大, 履带的使用寿命会
较滚动结构短, 因此适用于轻、小型掘进机。
3.4 履带板的合理设计 ( 1) 正确选用履 带 板 宽 度 。 在 满 足 机 器 接 地 比 压 的 要 求 下 ,
对 于 有 支 重 轮 的 履 带 行 走 机 构 , 其 制 造 成 本 高 , 安 装 、维 修
复杂, 由于履带节距与支重轮中心距的制造误差, 产生机体在行
走中的波动, 影响机体的稳定性, 但由于其滚动形式减小摩擦阻
力, 履带的使用寿命长, 适用 于 中 、重 型 掘 进 机 ; 无 支 重 轮 的 履 带
科学之友
Friend of S cience Amateurs
B 2008年 03月
掘进机履带式行走机构的研究
杨春海
( 煤炭科学研究总院太原研究院, 山西 太原 030006)
摘 要: 介绍了掘进机履带式行走机构的工作原理和性能特点, 对行走机构的组成、工作 原理、受力情况和影响行走装置的因素进行 了 分 析 , 提 出 了 一 定 的 解 决 思 路 , 为 行 走 机 构 的设计提供了一定的理论依据。 关键词: 掘进机; 履带; 行走机构 中图分类号: U415.0 文献标识码: A 文章编号: 1000- 8136(2008)03- 0001- 02
4 结束语
通过对履带行走装置的分析, 有助于履带行走装置的结构 和参数的确定, 对机器总体性能及可靠性的改善和提高具有一 定的实际意义。
作者简介: 杨春海, 男, 1980 年 3 月出生, 2001 年毕业于太原重型 机械学院机电系, 工程师。
履带行走机构功率损耗分析系统设计与实现
Xi n Ja t n i e st ’ io o g Un v r i a y,Xi n 7 0 4 ,Chn ; ’ 1 0 9 a ia
2 .Tay a sa c n tt t fChn a c n lg iu nRee rh I si eo iaCo l u Te h oo y& E gn e igGru r n ie rn o pCo p,
履带行走机构 功率损耗分析 系统设计 与实现
朱 爱斌 王 步 康 田 超 周 尧 陈 渭 , , , ,
( . 安 交 通 大 学 现 代 设 计 及 转 子 轴 承 系 统 教 育部 重 点 实验 室 , 西 西 安 7 0 4 ; 1西 陕 10 9 2 中 国煤 炭 科 工 集 团 太 原 研 究 院 , . 山西 太 原 0 0 0 ) 30 6
ZH U — i ,W ANG — a ,TI Aib n Bu k ng AN a ,ZH OU o Ch o Ya ,CH EN e W i
( . y La o a o y o d c t n M i ity f r Mo e n De i n a d Ro o - a i g S s e , 1 Ke b r t r fE u a i n s r o d r s n t rBe r y tm o g n
文章 编 号 :0 674 ( 0 10 —4 40 10 —5 X 2 l) 60 4 —5
De i n a m p e e t to fpo r l s na y i y t m o sg nd i l m n a i n o we o s a l s ss s e f r t a e e ha s o r c d v h c e r v lm c nim f t a ke e i l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 .M e h n c lEn i e rn n t ma i n I s i t ,No t i e st fCh n ,Tay a 3 0 1 c a ia g n e i g a d Au o t n t u e o t r h Un v r i o i a y i u n 0 0 5 ,Ch n ) ia
走机构 的设计 原则 和运动 受 力分析 , 结机 构 行走 时 的影 响 因素 , 总 以达 到 整 个机 构 结 构合 理 、 全 可靠 、 安
行 动 灵 活 的 目的 。
关键 词 : 带行走 机 构 ; 履 运动 受 力 ; 驱动 ; 影响 因素 中图分类 号 : 1 . TH 2 3 7 文 献标 志码 : A
Ab t a t: sr c The ta ke l i g m e ha im st e s r c d wa k n c n s i h upp tn r o h e m a h n ori g pa tf rw ol c i e,s c a e ha s i p id u h ashe vy m c nim sa ple
ZH AO u Y ,Y A N o H ngwe。 i
ቤተ መጻሕፍቲ ባይዱ
De in A n l ss a d Re e r h o a ke a ki g M e ha im sg a y i n s a c n Tr c d W l n c n s
( . mp e e E u p n s a c n t u e o h n i e f n - e g e I d s r o p C . 1 Co l t q i me tRe e r h I s i t fS a x i g F n l i n u t y Gr u o ,L d,Tay a 3 0 9 t B a t i u n 0 0 0 ,Ch n ia;
摘 要 : 带式行走机 构是 大型机 械 等整机 的 支承件 , 履 用来 支承 整机 的 重量 , 受机 构 在 工程作 业过 承
程 中的产 生 力 , 完成整机 在行进 、 并 后退 、 场 、 业 时的移动 。 因此 , 于 大型机械 ( 转 作 对 包括 工程机 械 、 冶金
机械 等 ) 的底 盘 , 一般 设计 成履 带驱动 结构 , 履带 沿着整机 纵 向 中心 对称 布 置。 本文 主要 研 究讨论 履 带行
履 带 式行 走机构 设计 分析和研 究
赵 瑜 闫宏 伟 ,
( . 西北 方 风 雷工 业 集 团有 限 公 司 成 套装 备研 究所 , 1山 山西 太 原 0 0 0 ; 3 0 9 2 中北 大学 机 械 工 程 与 自动 化 学 院 , . 山西 太 原 0 0 5 ) 3 0 1
t e rweg to h o e ma h n ,t e ev o c s f r d i h n i e rn r i g p o e s o c a ims n o o b a ih f t e wh l c i e o r c i e f r e o me n t e e g n e i g wo k n r c s f me h n s ,a d t p r o m v me to o ema h n i l i g f r r r b c wa d o a ig,a d wo k n .Th r f r ,ta k d d i e e f r mo e n fwh l c i e wh l wa kn o wa d o a k r ,r t t e n n r ig e eo e r c e rv c n t u t n i e e al d p e o e v c a ims( n l d n n i e rn c a im ,me a l r y me h n s ,e c , o sr c i s g n r l a o t d f r h a y me h n s o y i cu i g e g n e i g me h n s t l g c a im u t) Th a t rp l r r y e c r e i a sa e s mme rc lyd s o e l n h o g t d n l x e o h o ema h n .Th sa t l man y d s u s d l tia l ip s d ao g t e ln i i a l ft ewh l c i e u a i ri e c i l ic s e d sg rn i l n y a c l a f ta k d wa k n c a im ,s mma ie n l e c a t r fme h n s i l i g t e i n p i cp e a d d n mi o d o r c e l ig me h n s u rz d i fu n e f c o s o c a im n wak n o me t e s n b e S r c u e s f t n l x b l y r q e t. e a o a l t u t r , a e y a d f i i t e u s s r e i Ke r s Tr c e l i g me h n s y wo d : a k d wak n c a im,Dy a c l a ,Dr e mp c ig f c o s n mi o d i ,I a tn a t r v