导杆机构分析
曲柄(导杆)滑块机构设计分析正文.

目录1 引言1.1 选题的依据及意义·························································································(1)1.2 国内外研究概况及发展趋势··········································································(2)1.3 论文主要工作·······························································································(3)2 曲柄(导杆)滑块机构简介····································································(4)3 曲柄(导杆)滑块机构的运动学分析3.1 曲柄导杆滑块机构的运动分析······································································(5)3.1.1 机构装配的条件····················································································(6)3.1.2 建立数学模型·························································································(6)3.1.3 计算机辅助分析及其程序设计······························································(9)3. 2曲柄滑块机构的运动分析3.2.1 机构装配的条件·····················································································(25)3.2.2 建立数学模型·······················································································(25)3.2.3 计算机辅助分析及其程序设计·····························································(27)4 曲柄(导杆)滑块机构实验台装置设计4. 1 实验台结构·································································································(40)4.2 实验台硬件操作说明···················································································(41)4.3 用SolidWorks 2006实现实验台的立体图形················································(42)总结·········································································································(46)参考文献·········································································································(47)致谢·········································································································(48)1 引言1.1 选题的依据及意义1.曲柄(导杆)滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
转动导杆机构的运动分析
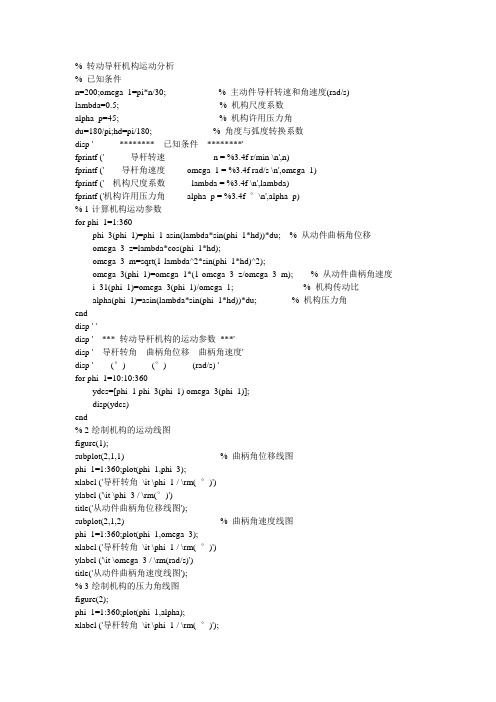
% 转动导杆机构运动分析% 已知条件n=200;omega_1=pi*n/30; % 主动件导杆转速和角速度(rad/s)lambda=0.5; % 机构尺度系数alpha_p=45; % 机构许用压力角du=180/pi;hd=pi/180; % 角度与弧度转换系数disp ' ******** 已知条件********'fprintf (' 导杆转速n = %3.4f r/min \n',n)fprintf (' 导杆角速度omega_1 = %3.4f rad/s \n',omega_1)fprintf (' 机构尺度系数lambda = %3.4f \n',lambda)fprintf ('机构许用压力角alpha_p = %3.4f °\n',alpha_p)% 1-计算机构运动参数for phi_1=1:360phi_3(phi_1)=phi_1-asin(lambda*sin(phi_1*hd))*du; % 从动件曲柄角位移omega_3_z=lambda*cos(phi_1*hd);omega_3_m=sqrt(1-lambda^2*sin(phi_1*hd)^2);omega_3(phi_1)=omega_1*(1-omega_3_z/omega_3_m); % 从动件曲柄角速度i_31(phi_1)=omega_3(phi_1)/omega_1; % 机构传动比alpha(phi_1)=asin(lambda*sin(phi_1*hd))*du; % 机构压力角enddisp ' 'disp ' *** 转动导杆机构的运动参数***'disp ' 导杆转角曲柄角位移曲柄角速度'disp ' (°) (°) (rad/s) 'for phi_1=10:10:360ydcs=[phi_1 phi_3(phi_1) omega_3(phi_1)];disp(ydcs)end% 2-绘制机构的运动线图figure(1);subplot(2,1,1) % 曲柄角位移线图phi_1=1:360;plot(phi_1,phi_3);xlabel ('导杆转角\it \phi_1 / \rm( °)')ylabel ('\it \phi_3 / \rm(°)')title('从动件曲柄角位移线图');subplot(2,1,2) % 曲柄角速度线图phi_1=1:360;plot(phi_1,omega_3);xlabel ('导杆转角\it \phi_1 / \rm( °)')ylabel ('\it \omega_3 / \rm(rad/s)')title('从动件曲柄角速度线图');% 3-绘制机构的压力角线图figure(2);phi_1=1:360;plot(phi_1,alpha);xlabel ('导杆转角\it \phi_1 / \rm( °)');ylabel ('\it \alpha / \rm(°)');line([0,360],[alpha_p,alpha_p]);text(365,45,'\alpha_{max}=45°');line([0,360],[0,0]); % 横坐标line([0,360],[-alpha_p,-alpha_p]);text(365,-45,'\alpha_{min}=-45°');title('机构压力角线图');text(230,30,'可行域');% 4-绘制机构的传动比线图和传动比与尺度系数关系线图figure(3);subplot(1,2,1) % 机构传动比线图phi_1=1:360;plot(phi_1,i_31);xlabel ('导杆转角\it \phi_1 / \rm( °)')ylabel ('\it i_{31}')title('机构传动比线图(尺度系数是定值)');subplot(1,2,2) % 机构传动比与尺度系数关系线图line([0,sin(alpha_p*hd)],[1,1+sin(alpha_p*hd)]);line([0,sin(alpha_p*hd)],[1,1-sin(alpha_p*hd)]);line([sin(alpha_p*hd),sin(alpha_p*hd)],[1+sin(alpha_p*hd),1-sin(alpha_p*hd)]); xlabel ('尺度系数\it \lambda = e / l_3 ')ylabel ('\it i_{31}')title('传动比与尺度系数关系线图');text(0.25,1.4,'\it i_{31max}')text(0.32,1.0,'可行域')text(0.25,0.6,'\it i_{31min}')******** 已知条件********导杆转速n = 200.0000 r/min导杆角速度omega_1 = 20.9440 rad/s机构尺度系数lambda = 0.5000机构许用压力角alpha_p = 45.0000 °*** 转动导杆机构的运动参数***导杆转角曲柄角位移曲柄角速度(°) (°) (rad/s)10.0000 5.0191 10.592020.0000 10.1534 10.956430.0000 15.5225 11.577540.0000 21.2528 12.472550.0000 27.4790 13.657060.0000 34.3411 15.135170.0000 41.9757 16.886680.0000 50.5013 18.854790.0000 60.0000 20.9440100.0000 70.5013 23.0332 110.0000 81.9757 25.0013 120.0000 94.3411 26.7528 130.0000 107.4790 28.2309 140.0000 121.2528 29.4154 150.0000 135.5225 30.3104 160.0000 150.1534 30.9315 170.0000 165.0191 31.2959 180.0000 180.0000 31.4159 190.0000 194.9809 31.2959 200.0000 209.8466 30.9315 210.0000 224.4775 30.3104 220.0000 238.7472 29.4154 230.0000 252.5210 28.2309 240.0000 265.6589 26.7528 250.0000 278.0243 25.0013 260.0000 289.4987 23.0332 270.0000 300.0000 20.9440 280.0000 309.4987 18.8547 290.0000 318.0243 16.8866 300.0000 325.6589 15.1351 310.0000 332.5210 13.6570 320.0000 338.7472 12.4725 330.0000 344.4775 11.5775 340.0000 349.8466 10.9564 350.0000 354.9809 10.5920 360.0000 360.0000 10.4720。
摆动导杆机构运动特性分析

工业技术科技创新导报 Science and Technology Innovation Herald81摆动导杆机构是在曲柄滑块机构中将曲柄作为机架演化而来的,将曲柄的连续回转运动转化为导杆的往复摆动,故称为摆动导杆机构。
摆动导杆机构在牛头刨床、插床、低频振动攻丝机和缆线爬行机器人[1-3]等机构中得到了广泛的应用,对其运动参数进行分析研究,对于优化设计摆动导杆机构,提高工作效率具有重要意义。
该文研究了摆动导杆机构的急回特性及影响因素,应用A D A M S 软件对其进行了运动仿真分析,并应用Z N H -B 型连杆机构实验台对运动参数的合理性进行了实验验证。
1 摆动导杆机构相关参数的确定如图1所示,A B C D E 为摆动导杆偏置滑块机构运动简图,A 1B 1C 1D 1E 1和A 2B 2C 2D 2E 2是其两个极限位置,E为偏置滑块,1l 、2l 、3l 和4l 分别表示AC、A B、C D和DE的长度,A B为曲柄,θ为极位夹角。
工作时,以曲柄A B为原动件,带动滑块B 在导杆D C中往复移动,同时,导杆D C 带动偏置滑块E 在水平导轨上往复运动,设滑块E 向左运动为工作行程,要求速度平稳,工作结束空程返回时,要求速度较快,具有急回特性,以提高工作效率。
根据定义[4],描述急回特性的行程速比系数θπθπ−+=K (1)K值越大,说明急回特性越明显。
由几何关系可知极位夹角12arcsin2l l =θ (2)由式(1)、式(2)可知,K值在1l 一定时取决于2l 的长度,K值随2l 的增大而增大,几乎呈线性关系,说明曲柄越长,急回运动特性越明显,生产效率越高,如图2所示。
经推导,滑块在工作行程内的速度不均匀系数)2sin 1(2min max θθπδ++=-=v v v E E (3)因此,根据式(3)可得速度不均匀系数与极位夹角的关系,如图3所示。
极位夹角试取0~30=θ~70 °。
牛头刨床机械原理课程设计报告3点和6点
牛头刨床中导杆机构的运动分析及动态静力分析第一章机械原理课程设计的目的和任务1课程设计的目的:机械原理课程设计是高等工业学校机械类学生第一次全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要教学环节。
起目的在于进一步加深学生所学的理论知识,培养学生的独立解决有关课程实际问题的能力,使学生对于机械运动学和动力学的分析和设计有一个比较完整的概念,具备计算,和使用科技资料的能力。
在次基础上,初步掌握电算程序的编制,并能使用电子计算机来解决工程技术问题。
2课程设计的任务:机械原理课程设计的任务是对机器的主题机构进行运动分析。
动态静力分析,并根据给定的机器的工作要求,在次基础上设计;或对各个机构进行运动设计。
要求根据设计任务,绘制必要的图纸,编制计算程序和编写说明书等。
第二章、机械原理课程设计的方法机械原理课程设计的方法大致可分为图解法和解析法两种。
图解法几何概念比较清晰、直观;解析法精度较高。
第三章、机械原理课程设计的基本要求1.作机构的运动简图,再作机构两个位置的速度,加速度图,列矢量运动方程;2.作机构两位置之一的动态静力分析,列力矢量方程,再作力的矢量图;3.用描点法作机构的位移,速度,加速度与时间的曲线。
第四章机械原理课程设计的已知条件1、机构简介图1表1 设计数据牛头刨床是一种用于平面切削加工的机床,如图1所示。
电动机经过皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀不切削,称为空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回运动的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图1中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作过程中,受到很大的切削阻力(在切削的前后各有一段0.05H的空刀距离,简图1,b),而空回行程中则没有切削阻力。
导杆机构
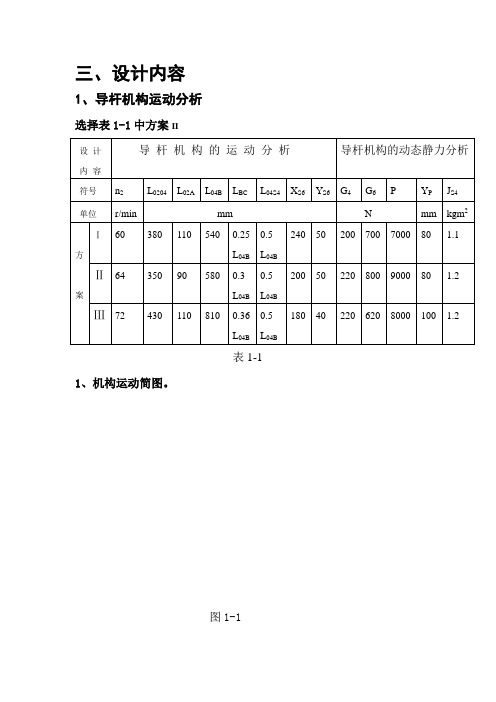
三、设计内容1、导杆机构运动分析选择表1-1中方案II设计内容导杆机构的运动分析导杆机构的动态静力分析符号n2 L0204 L02A L04B L BC L04S4 X S6 Y S6 G4 G6 P Y P J S4 单位r/min mm N mm kgm2方案Ⅰ60 380 110 540 0.25L04B0.5L04B240 50 200 700 7000 80 1.1 Ⅱ64 350 90 580 0.3L04B0.5L04B200 50 220 800 9000 80 1.2 Ⅲ72 430 110 810 0.36L04B0.5L04B180 40 220 620 8000 100 1.2表1-11、机构运动简图。
图1-12、曲柄位置“7”速度分析,加速度分析(列矢量方程,画速度图,加速度图)取曲柄位置“7”进行速度分析,其分析过程同曲柄位置“1”。
取构件3和4的重合点A进行速度分析。
列速度矢量方程,得υA4=υA3+υA4A3大小? √?方向⊥O4A⊥O2A∥O4B代表pa4 pa3 a3a4V A3=ω2l o2A=64/60×6.28×0.09=0.603m/s取速度极点P,速度比例尺µv=0.01(m/s)/mm,作速度多边形如图1-2则由图1-2知,υA4=pa4·μv=29×0.01=0.29m/sυA4A3=a3a4·μv=52×0.01m/s=0.52m/s图1-2υB5=υB4=υA4·O4B/ O4A=0.44m/s取5构件为研究对象,列速度矢量方程,得υC5=υB5+υC5B5大小? √?方向∥XX⊥O4B⊥BC代表pc5 pb4 b4b5其速度多边形如图1-2所示,有υC5=5Pc·μv=42×0.01=0.42m/s取曲柄位置“7”进行加速度分析,取曲柄构件3和4的重合点A进行加速度分析.列加速度矢量方程,得:a A4 =a A4n +a A4t= a A3n +a A4A3k+a A4A3r 大小? ω42l O4A ?√2ω4υA4A3 ? 方向? A→O4⊥O4B A→O2⊥O4B(向右)∥O4B代表pA4’pn4’n4’A4’p’A3’A3’k’k’A4’取加速度极点为P',加速度比例尺μa=0.02(m/s2)/mm作加速度多边形图1-3图1-3则由图1─3知:a A4t= n4’A4’·μa =137×0.02m/s2=2.74m/s2α4= a A4t/l O4A = 7.17 m/s2a A4 = pA4’·μa = 138×0.01m/s2 =2.76 m/s2用加速度影象法求得a B5 = a B4 = a A4 ×l O4B/l O4A=4.19m/s2取5构件的研究对象,列加速度矢量方程,得a C5=a B5+ a C5B5n+ a C5B5t大小?√√?方向∥xx √ C→B ⊥BC代表 P’c5’ P’B5’ n5’B5’ C5’n5’加速度比例尺μa=0.02(m/s2)/mm其加速度多边形如图1─4所示,有图1-4a C5B5t= n5’c5’·μa =31×0.02m/s2 =0.62m/s2a C5 = P’c5’·μa =179×0.02m/s2 =3.58m/s23、曲柄位置“10”速度分析,加速度分析(列矢量方程,画速度图,加速度图)取曲柄位置“10”进行速度分析。
瞬心法对导杆机构的运动分析
中 图 分 类 号 : H1 2 T 3
文献标 识 码 : A
文 章 编 号 :0 7—9 8 (0 2 0 10 4 3 2 0 )5—0 1 0 06 2
M o i n Ana y i i e —b r M e ha s s n t ns a a o s Ce t r o l c t to l s sof Gu d d— a c nim Ba e o he I t nt ne u n e f Ve o iy d
响 原机 构各 构 件 的运 动 。 然 , 显 滑块 6任 意 时 刻对 其 导 路 的
滑 动 速 度 就 是 上 述 的 t E [。 4
在 假想 机 构 中 , 得 瞬 心 P 6则 有 : 块 的 速 度 t 求 , 滑 , 6=
Z ,o ' M
. ,
0l= A 3 F。 因 此 , ( ) 为 : 式 2成
维普资讯
l 6 20 0 2年 9月 机 械设 计 与制造 工 程 第 3 卷 l 第 5期
瞬 心 法 对 导 杆 机 构 的 运 动 分 析
冯 立 艳 , 秀 芳 程
( 北理 工 学 院 机 械 系 , 北 唐 山 河 河 0 30 ) 6 0 9
F ENG — y n。 Li a CHEN G u— f n Xi a g
( b i nt ueo c n l y Hee T n sa ,0 3 0 ,C ia He e Isi t f t Teh o g , b i a gh n 6 0 9 hn ) o
Ab t a t Th s p p r a ay e h eo i n c ee a in o ud d— b r m e h n s wih t e i sa a e u e t r o eo iy sr c : i a e n l z d t e v lc t a d a c lr t f g i e y o a ca i m t h n t ntn o s c n e fv lc t 。 b o d n d i p l a i n.W i h yx t e ia e h n s ,i t s i e e d n t i h r r a e e t a p i t s c o t t e h t )h t l h c m cai m t e t id Fr u e s en t e y。a d v r id t e c n lso s wi a f o n e i e h o cu i n t b r f h g o p m e h d. r u to Ke r s Veo iy I s a t n u e t r y wo d : l t n t n a e) sC n e ;Gud d b r M e h n s ;Ac e e a in;Fr u e se n Th o y c i e a c a im c lr t o e d rti e r
牛头刨床导杆机构的运动分析、动态静力分析

摘要——牛头刨床运动和动力分析一、机构简介与设计数据1、机构简介牛头刨床是一种用于平面切削加工的机床,如图1-1a。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2 –3 –4 –5 –6 带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生常率。
为此刨床采用有急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1 – 9 – 10 – 11 与棘轮带动螺旋机构(图中未画),使工作台连同工件做一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约0.05H的空刀距离,图1-1b),而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量a b图目录摘要 (III)1设计任务 (1)2 导杆机构的运动分析 (2)导杆机构的动态静力分析 (4)3.1运动副反作用力分析 (4)3.2力矩分析 (6)4方案比较 (7)5总结 (10)6参考文献 (10)《机械原理课程设计》说明书1设计任务机械原理课程设计的任务是对机器的主题机构进行运动分析。
动态静力分析,确定曲柄平衡力矩,并对不同法案进行比较,以确定最优方案。
要求根据设计任务,绘制必要的图纸和编写说明书等。
2 导杆机构的运动分析2.1 速度分析取曲柄位置1’对其进行速度分析,因为2和3在以转动副相连,所以V A2=V A3,其大小等于ω2l02A,指向于ω2相同。
取构件3和4的重合点A进行速度分析。
列速度矢量方程,得υA4 = υA3 + υA4A3大小 ? √ ?方向⊥O4A ⊥O2A ∥O4B选比例尺μv=0.004(m/s)/mm,做出速度矢量图(见图a)νA4=0.088m/sνA3=0.816m/s取5构件作为研究对象,列速度矢量方程,得υC5 = υB5 + υC5B5大小 ? √ ?方向∥XX ⊥O4B ⊥BC取速度极点p,选比例尺μv=0.004(m/s)/mm,做出速度矢量图(见图a)νC5=0.16m/sνC5B5=0.044m/s2.2 加速度分析取曲柄位置“1”进行加速度分析。
基于Pro/E的转动导杆机构运动仿真分析
d i 1 . 9 9 j i n 10 2 9 . 0 2 0 . 2 o :0 3 6 / . s . 0 5— 7 8 2 1 . 8 0 3 s
基 于 Po E 的转 动 导杆 机 构运 动仿 真 分 析 r /
杨 天 兴 , 国 红 于
( 兰州城 市学院, 甘肃 兰州 摘 70 7 ) 30 0
单击 “ 图” 视 菜单 栏 中 的“ 向” “ 曳元件 ”选 中 定 一 拖 , 要拖动 的 曲柄元件拖 动旋转 , 检查机构 运动情况 。
图 3 转动导杆实体装配
图 1 转动导杆机构示意
■
转 动导 杆机 构 一般 应 用 于 回转式 油 泵 、 牛头 刨
床 及插 床 等 机 构 中 J 图 4所 示 为 转 动 导 杆 机 构 。
要: 文章利用 Po E中具有强大功能 的仿真模块对转 动导杆机构的运动进行了仿真分析 , r/ 揭示 了PoE r /
仿 真技 术在机械产品设计 中的重要作用 。
关 键 词 :r E; 动 导 杆 ; 真 分 析 Po 转 / 仿 中 图分 类 号 :H13 5 T 3 . 文 献 标 识 码 : B 文 章 编 号 :05 29 (0 2 0 — 0 3 0 10 — 7 8 2 1 )8 0 5 — 2
销 钉 的连接 方式分 别 连 接 曲柄 和 铰链 、 动 导 杆 和 转
仿真分析 , 据此来验证设计 的合理性 、 可行性 。还可 以利 用运 动仿 真分 析模 块进 行 位移 、 度 、 速度 和 速 加 运动 轨迹 等各 种测 量 , 从而 更好 地 、 快 地完 成产 品 更 的设计 工 作 。
三 维 建模 软 件 Po E G N E r/ N I E R是 美 国 P C( T 参 数 技术 ) 司 的产 品 。 自 18 公 9 8年 Po/ re E问世 以来 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7、机构运动简图8、计算机构的自由度 F=3×5-2×7=1五、用解析法作导杆机构的运动分析如图所示,先建立一直角坐标系,并标出各杆矢量及其方位角。
其中共有四个未知量3θ、4θ、3S 、E S 。
为求解需建立两个封闭的矢量方程,为此需利用两个封闭的图形O 3AO 2O 3及O 3BFDO 3,由此可得:→→→→→→→+=+=+ES L L '64L3S3L1L6并写成投影方程为:’64433E 4433116331133L sin L sin L 0S cos L cos L sin sin cos cos =+=-++==θθθθθθθθL L S L S由上述各式可解得:4433E 311343364111163cos L cos L S cos cos L S L sin L L arcsincos L sin L L arctanθθθθθθθθθ⨯+⨯=⨯=⨯-=⨯⨯+=⋅由以上各式即可求得3θ、4θ、3S 、E S 四个运动变量,而滑块的方位角2θ=3θ。
然后,分别将上式对时间取一次、二次导数,并写成矩阵形式,及得一下速度和加速度方程式。
⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡//-=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-•00cos sin S 0cos L cos L 01sin L -sin L -000cos S sin 00sin S -cos 111114334433443333333θθθθθθθθθθL L w v w w E =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-••E αααθθθθθθθθ43344334433333333S 0cos L cos L 01sin L -sin L -000cos S sin 00sin S -cos ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡//-+⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡---••00sin cos 0sin w L -s w L -00c w L -cos w L -000sin w S -cos cos 00cos w S sin S -sin 111111144433344433333333333333333θθθθθθθθθθθθw L w L w in os S w w 而2w =3w 、2α=3α根据以上各式,将已知参数代入,即可应用计算机计算。
并根据所得数值作出机构的位置线图、速度线图、加速度线图。
这些线图称为机构的运动线图。
通过这些线图可以一目了然的看出机构的一个运动循环中位移、速度、加速度的变化情况,有利于进一步掌握机构的性能。
六、导杆机构的动态静力分析受力分析时不计摩擦,且各约束力和约束反力均设为正方向 (1) 对刨刀进行受力分析()cR56x6R166R56yX 0 F F 01Y 0F F G 02=++==+-=∑∑,F ,()(2)对5杆进行受力分析F R56yF R16F R56xF 6FcG 65555x 55x 5y 55yM J F m S F m S ••••=-⨯α=-⨯=-⨯联立(1)(2)(3)(4)(5)各式可以得到矩阵形式如下:F R65x(3) 对滑块3进行受力分析(不计重力)R23xR43xR23yR43yO2R23xR43x11R23yR43y 11X 0,F F 0(6)Y 0,F F 0(7)M 0,(F F )L sin (FF )L cos 0(8)=+==+==+⨯⨯θ++⨯⨯θ=∑∑∑(4)对4杆进行受力分析F R23xF R23yF R43xF R43yA4444x 44x 4y 44yM J F m S F m S ••••=-⨯α=-⨯=-⨯R54x4xR34xR14x R54y4yR34yR14y4S4R14xS4O3R34xS4AR54x B S4R14y S4O3R34y S4A R54y B S44X 0,F F F F 0(9)Y 0,F F F F G 0(10)M 0,F (y y )F (y y)F (y y )F (x x )F (x x )F (x x )M 0(11)=+++==+++-==⨯-+⨯--⨯--⨯--⨯-+⨯-+=∑∑∑(5)对原动件曲柄2进行受力分析曲柄2不计重力,且转动的角速度一定,角加速度为零,惯性力矢和惯性力矩都为零∑Fx=0,F R32x+F R12x=0;∑Fy=0,F R32y+F R12y=0;∑Mo2=0,F R32x×L2sinφ+F R32y×L2cosφ=0;七、Matlab编程绘图Matlab源程序:clear all;clc;%初始条件theta1=linspace(-20.77,339.23,100);%单位度theta1=theta1*pi/180;%转换为弧度制W1=80*pi/30;%角速度单位rad/sH=0.6;%行程单位mL1=0.1605;%O2A的长度单位mL3=0.6914;%O3B的长度单位mL4=0.2074;%BF的长度单位mL6=0.370;%O2O3的长度单位mL6u=0.6572;%O3D的长度单位mZ=pi/180;%角度与弧度之间的转换dT=(theta1(3)-theta1(2))/W1;%时间间隔for j=1:100t(j)=dT*(j-1);%时间因素end%求解S3、Theta3、Theta4和SE四个变量S3=((L6)^2+(L1)^2-2*L6*L1*cos(theta1+pi/2)).^0.5;%求出O3A的值for i=1:100%求解角度theta3、Theta4和SE的长度theta3(i)=acos(L1*cos(theta1(i))/S3(i));theta4(i)=asin((L6u-L3*sin(theta3(i)))/L4);SE(i)=L3*cos(theta3(i))+L4*cos(theta4(i));end%求解完成%求解完成%求解VS3、W3、W4和VE四个变量for i=1:100J= inv([cos(theta3(i)),-S3(i)*sin(theta3(i)),0,0;sin(theta3(i)),S3(i)*cos(theta3(i)),0,0;0,-L3*sin(theta3(i)),-L4*sin(theta4(i)),-1;0,L3*cos(theta3(i)),L4*cos(theta4(i)),0]);K=J*W1*[-L1*sin(theta1(i));L1*cos(theta1(i));0;0];VS3(i)=K(1);W3(i)=K(2);W4(i)=K(3);VE(i)=K(4);end%求解完成%求解aS3、a3、a4、aE四个变量for i=1:100J= inv([cos(theta3(i)),-S3(i)*sin(theta3(i)),0,0;sin(theta3(i)),S3(i)*cos(theta3(i)),0,0;0,-L3*sin(theta3(i)),-L4*sin(theta4(i)),-1;0,L3*cos(theta3(i)),L4*cos(theta4(i)),0]);P=W1*W1*[-L1*cos(theta1(i));-L1*sin(theta1(i));0;0];M=[-W3(i)*sin(theta3(i)),-VS3(i)*sin(theta3(i))-S3(i)*W3(i)*cos(t heta3(i)),0,0;W3(i)*cos(theta3(i)),VS3(i)*cos(theta3(i))-S3(i)*W3(i)*sin(theta3 (i)),0,0;0,-L3*W3(i)*cos(theta3(i)),-L4*W4(i)*cos(theta4(i)),0; 0,-L3*W3(i)*sin(theta3(i)),-L4*W4(i)*sin(theta4(i)),0]; N=[VS3(i);W3(i);W4(i);VE(i)];K=J*(-M*N+P);aS3(i)=K(1);a3(i)=K(2);a4(i)=K(3);aE(i)=K(4);end%求解完成%动态静力分析%初始条件M4=22;M5=3;M6=52;Js4=0.9;Js5=0.015;Fc=1400;Ls4=0.5*L3;Ls5=0.5*L4;%给切削阻力赋值for i=1:100if((abs(SE(1)-SE(i))>0.05*H&&abs(SE(1)-SE(i))<0.95*H)&&(theta1(i) <pi))Fc(i)=1400;elseFc(i)=0;endend%赋值完成%求解平衡力矩J4=Js4+M4*(0.5*L3)*(0.5*L3);%导杆对点O3的转动惯量for i=1:100Ekk(i)=(M6*VE(i)*VE(i)+Js5*W4(i)*W4(i)+M5*VE(i)*VE(i)+J4*W3(i)*W3 (i))/2;%计算总动能enddEkk(1)=Ekk(1)-Ekk(100);%动能的改变量for i=2:100dEkk(i)=Ekk(i)-Ekk(i-1);%动能的改变量endfor i=1:100MM(i)=(dEkk(i)+Fc(i)*abs(VE(i)))/W1;%求平衡力矩end%画图%画运动图figure(1);plot(t,theta3,'r');hold on;plotyy(t,theta4,t,SE);grid on;xlabel('时间t/s');ylabel('theta3、theta4(rad)');title('角度Theta3、theta4和位移SE');axis([ 0 , 0.75,-0.2,2]);figure(2);plot(t,W3,'r');hold on;grid on;plotyy(t,W4,t,VE);xlabel('时间t/s');.ylabel('W3、W4(rad/s)');title('角度速度W3、W4和速度VE');axis([0 , 0.75,-5,3]);figure(3);plot(t,a3,'r');hold on;plotyy(t,a4,t,aE);grid on;xlabel('时间t/s');ylabel('a3、a4(rad/s/s)');title('角度加速度a3、a4和加速度aE');axis([0 , 0.75,-80,80]);%运动图画完%画反力图figure(4);plotyy(theta1,Fc,theta1,SE);xlabel('Theta1(时间t)');ylabel('Fc');axis([theta1(1) ,theta1(100),-50,1400]);title('切削阻力Fc与位移SE');grid on;figure(5);plotyy(theta1,MM,theta1,Fc);xlabel('Theta1(时间t)');ylabel('力矩');axis([theta1(1) ,theta1(100),-50,300]);title('平衡力矩');grid on;figure(6);plotyy(theta1,Ekk,theta1,SE);xlabel('Theta1(时间t)');ylabel('Fc');title('导杆、连杆和刨头的总动能');grid on;theta1(1)theta1(100).。