“天棚”阻尼控制
基于天棚和地棚混合阻尼的高速车辆横向减振器半主动控制

第3 2卷第 2期
动
与
冲
击
J OURNAL OF VI B RAT I ON AND S HOCK
基 于天棚 和 地棚 混 合 阻 尼 的高速 车 辆横 向减振 器 半 主动 控 制
郭孔辉 , 隋记魁 ,郭耀华
1 0 0 8 2 ;2 . 吉林 大学 汽车动态模拟 国家重点实验室 , 长春 ( 1 . 湖南大学 汽 车车 身先进设计制造 国家重点实验室 , 长沙 4 1 3 0 0 2 2 )
摘 要 :在研究抑制高速轨道车辆横向振动时, 传统天棚阻尼控制方法使车体的横向振动降低的同时, 却增加 了
转向架 和轮对 的横 向振 动 , 导致机车高速运行时脱轨 的可 能性 变大 , 运行 安全性 降低 。针对上 述问题 , 在A d a m s / R i a l 中
建立了轨道车辆单 节拖车 的整 车模型 , 利用 M a t l a b / S i m u l i n k工具 , 结 合天棚 阻尼控制和地棚 阻尼控制 特点 , 研究 了} 昆 合
s p e e d,t h e o p e r a t i o n s a f e t y wa s a l s o r e d u c e d. I n o r d e r t o s o l v e t h e p r o b l e ms a b o v e,a s i n g l e t r a i l e r v e h i c l e mo d e l wa s e s t a b l i s h e d i n Ada ms /Ri a 1 . Co mb i n i n g s k y h o o k d a mp i n g c o n t r o l wi t h g r o u n d h o o k d a mp i n g c o n t r o l , t he mi x e d d a mp i n g
车辆半主动悬架改进型天棚阻尼控制算法
车辆半主动悬架改进型天棚阻尼控制算法佚名【摘要】以改善车辆乘坐舒适性为目的,通过分析车体垂向速度和垂向加速度的相互关系,设计了车辆悬架改进型天棚阻尼半主动控制算法。
以天棚阻尼控制算法为对比,对设计的算法进行性能仿真。
结果表明,与传统的天棚阻尼控制算法相比,该算法能显著降低车体加速度,提高乘坐舒适性,且具有计算量小,简单实用的优点,适用于车辆振动的控制。
%Aiming at improving vehicle ride comfort and by analyzing the mutual effects between vertical ve-locity and vertical acceleration of vehicle, a modified sky-hook damping semi-active control algorithm for vehicle suspensions is designed. With conventional sky-hook damping control algorithm as comparison reference, a suspen-sion performance simulation is conducted with the algorithm designed. The results show that compared with conven-tional sky-hook control algorithm, the modified sky-hook control algorithm can significantly reduce the acceleration and improve the ride comfort of vehicle with the merits of being simple, practical with less computation efforts, suit-able for vehicle vibration control.【期刊名称】《汽车工程》【年(卷),期】2015(000)008【总页数】5页(P931-935)【关键词】悬架;控制算法;天棚阻尼控制;改进【正文语种】中文悬架是车辆重要组成部分,其性能对车辆的乘坐舒适性、操纵稳定性和行驶安全性具有决定性影响[1-2]。
汽车悬架系统常见故障诊断及排除方法
汽车悬架系统常见故障诊断及排除方法摘要:随着汽车工业的发展,人们越来越关注汽车的舒适性、安全性、可靠性,而悬架系统的性能与汽车行车的安全度和舒适度是密切相关的,鉴于此,下面就介绍悬架系统易出现的故障的检查及排除方法,供广大维修人员参考。
关键词:汽车;悬架系统;故障;排除一、汽车悬架系统的结构汽车悬架系统是是保证车轮(或车桥)与汽车承载系统(车架或承载式车身)之间具有弹性联系并能传递载荷、缓和冲击、衰减振动以及调节汽车行驶中的车身位置等有关装置的总称。
现代汽车的悬架系统虽然结构形式各异,但一般都由弹性元件、导向装置、减振器和横向稳定器等组成,如图1。
图1汽车悬架系统的组成二、汽车悬架系统的分类由于对汽车悬架的研发技术不断的发展和进步,崭新的悬架系统也不断涌现。
按照不同的标准有不同的表达形式,如按导向装置的不同则可分为:非独立悬架系统和独立悬架系统。
非独立悬架系统的前端与车身铰接,后端则通过吊耳或滑板连接在车身或者车架上;悬架系统的减震器上端跟车身相连,下端通过铰接的方式连接车桥由于这种方式的链接,在车轮振动的过程中悬架跟车身并没有达到独立的效果。
有的非独立悬架采用的是技术成熟、结构简单和成本较低的钢板弹簧作为弹性元件,大部分被应用在货车的前后悬架中,有时也会被用在中低档的乘用车辆的后悬架上。
有的是采用螺旋弹簧作为弹性元件,但螺旋弹簧只能承受垂直载荷,所以在悬架上往往会加设导向机构和减震器。
还有的是用空气弹簧作为其弹性元件的非独立悬架,由于空气弹簧只能承受垂直载荷,因而必须加入减震器,这类悬架的纵向力和力矩由悬架的纵向推力杆和横向推力杆来传递。
独立悬架的车桥设计成断开的,每一侧车轮各自通过弹性元件与车架(或车身)连接。
当一侧车轮受到冲击时,另一侧车轮并没有受到很大的影响,这样就保证了汽车操作的稳定性与平顺性,并利于放低安装发动机。
独立悬架分成好几类,最为常见的有双横摆臂式和滑柱摆臂式,滑柱摆臂式又称为麦弗逊式。
基于磁流变阻尼器的汽车座椅悬架系统天棚阻尼控制器

基于磁流变阻尼器的汽车座椅悬架系统天棚阻尼控制器_论文重庆大学本科学生毕业设计(论文) 基于磁流变阻尼器的车辆座椅悬架系统天棚阻尼控制器设计学生:李章洲学号:20083467指导教师:浮洁专业:电子科学与技术重庆大学光电工程学院二O一二年六月Graduation DesignThesis of Chongqing UniversitySkyhook controller design of vehicle seat suspension system based on magnetorheological damperUndergraduate: Li ZhangzhouSupervisor: Lec. Fu JieMajor: Electronic science and technologyCollege of Opto-electronic EngineeringChongqing UniversityJune 2012摘要座椅悬架作为汽车的重要组成部分,其作用是缓和不平路面传传递给乘客或司机的振动,提高乘坐和驾驶的舒适性。
现有座椅悬架多采用被动悬架,其参数不能根据路面的状况实时变化,减振效果不理想。
磁流变座椅悬架是一种半主动悬架,具有阻尼力可调范围大、响应快等优点。
因此,研究基于磁流变减振器的半主动悬架系统对改善座椅悬架的动态性能、提高汽车安全性和舒适性有着重要意义。
本文以磁流变座椅悬架系统为对象,在对悬架系统动力模型分析的基础上,设计天棚控制策略,实现振动衰减。
主要工作如下:(1)对目前座椅悬架系统的发展进行综述,阐述了研究半主动座椅悬架系统的意义,并分析磁流变阻尼器的常用控制策略,提出本文将要开展的工作,了解磁流变阻尼器和半主动悬架系统的国内外研究现状。
(2)了解磁流变液的特性和相关应用,掌握半主动悬架系统的研究方法,建立磁流变座椅悬架系统的动力学模型。
(3)对天棚控制算法进行研究,利用Matlab对悬架模型的传递函数进行幅频特性分析,求解出满足要求的天棚阻尼系数。
汽车悬架系统动力学模型的研究
1 绪论随着社会的发展和文明的进步,汽车作为一种交通工具,已成为人们出行的主要选择,汽车乘坐的安全性、舒适性已成为世人关注的焦点。
汽车作为高速客运载体,其运行品质的好坏直接影响到人的生命安全,因此,与乘坐安全性、舒适性密切相关的轿车动力学性能的研究就显得非常重要。
悬架系统汽车的一个重要组成部分,它连接车身与车轮,主要由弹簧、减震器和导向机构三部分组成。
它能缓冲和吸收来自车轮的振动,传递车轮与地面的驱动力与制动力,还能在汽车转向时承受来自车身的侧倾力,在汽车启动和制动时抑制车身的俯仰和点头。
悬架系统是提高车辆平顺性和操作稳定性、减少动载荷引起零部件损坏的关键。
一个好的悬架系统不仅要能改善汽车的舒适性,同时也要保证汽车行驶的安全性,而提高汽车的舒适性必须限制汽车车身的加速度,这就需要悬架有足够的变形吸收来自路面的作用力。
然而为了保证汽车的安全性,悬架的变形必须限定在一个很小的范围内,为了改善悬架性能必须协调舒适性和操作稳定性之间的矛盾,而这个矛盾只有采用这折衷的控制策略才能合理的解决。
因此,研究汽车振动、设计新型汽车悬架系统、将振动控制在最低水平是提高现代汽车性能的重要措施[1][2]。
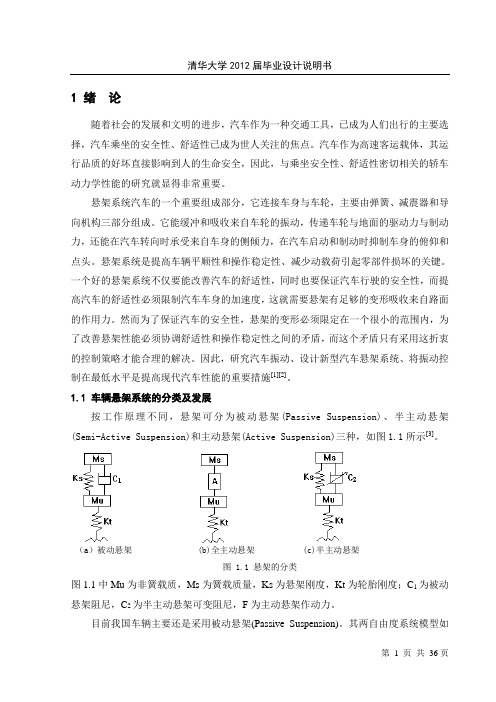
1.1 车辆悬架系统的分类及发展按工作原理不同,悬架可分为被动悬架(Passive Suspension)、半主动悬架(Semi-Active Suspension)和主动悬架(Active Suspension)三种,如图1.1所示[3]。
(a)被动悬架 (b)全主动悬架 (c)半主动悬架图 1.1 悬架的分类图1.1中Mu为非簧载质,Ms为簧载质量,Ks为悬架刚度,Kt为轮胎刚度;C1为被动悬架阻尼,C2为半主动悬架可变阻尼,F为主动悬架作动力。
目前我国车辆主要还是采用被动悬架(Passive Suspension)。
其两自由度系统模型如图1.1(a)所示。
传统的被动悬架一般由参数固定的弹簧和减振器组成,其弹簧的弹性特性和减振器的阻尼特性不能随着车辆运行工况的变化而进行调节,而且各元件在工作时不消耗外界能源,故称为被动悬架。
地棚阻尼控制

地棚阻尼控制
地棚阻尼控制嘛,就像是给车子的悬挂系统装了个聪明的大脑,专门用来对付路上的颠簸。
你可以想象这么个场景:不是想着把车固定在空中不动(那就是天棚控制的想法),而是让车轮子紧紧贴着地面,不管路多坑洼,都能稳稳地抓住地,这就叫地棚控制。
它不强求车里的人感觉一点颠簸都没有,更在乎的是车轮和地面保持良好的接触,这样开车既安全,又有更好的操控感。
就像是车子在跳舞,随着地面的节奏灵活地调整步伐,而不是硬邦邦地抵抗每一个坑洞。
在实际操作中,工程师们不会只用一种方法,而是把地棚控制和天棚控制的优点结合起来,创造出既能舒服坐着,又能稳稳开的混合策略。
就像是车子自己会根据路况和速度,随时调整软硬度,既照顾到乘客的感受,也考虑到了驾驶的需要。
现在的高级车很多都用上了这种高科技悬挂,里面装满了各种传感器和电脑程序,能够瞬间读懂路面信息,然后快速调整悬挂系统,让开车变成一种享受。
“天棚”阻尼控制

“天棚”阻尼控制“天棚”阻尼是D.Karnopp 利用最优控制理论在1974 年提出来的一种悬架系统主动控制策略,其控制性能优越,具有一定的鲁棒性,但由于它是基于悬架速度的负反馈主动控制,对于移动的车辆来说无法实现。
但将“天棚”阻尼悬架系统作为控制的参考模型,即把“天棚”系统作为实际系统控制的动态目标得到广泛的应用。
但由于可调参数只有“天棚”阻尼系数,系统性能无法进一步提高。
本文采用天棚阻尼悬架作为研究对象,将分数阶微积分引入到“天棚”阻尼控制系统中,取代原来的整数阶导数。
以B级路面为输入信号,根据优化理论找到最优的阶数和阻尼系数。
最终,通过分析比较分数阶“天棚”阻尼悬架、整数阶“天棚”阻尼悬架和被动悬架,得出分数阶“天棚”阻尼悬架能够全面提高整数阶“天棚”阻尼悬架的性能。
1 车辆半主动悬架模型车辆悬架按振动控制的方法分为被动、半主动、主动3 个类型,其中主动悬架可很好地提高车辆的乘坐舒适性和操纵稳定性,但因其价格昂贵、能耗高、结构复杂、可靠性差,限制了它的推广;被动悬架系统减震器的阻尼特性不能根据路面状况和车辆运行状态进行实时的调节,因而控制效果有限;半主动悬架相比于主动悬架,结构相对简单,能量消耗少,价格低廉,而性能接近主动悬架,特别是磁流变材料的出现,其应用前景非常良好。
以具有两自由度的1/4 车辆悬架模型作为研究对象,具有磁流变阻尼器的半主动悬架模型如图1 所示,其动力学方程:式中,m——簧载质量,m——簧下质量; s——悬架结构阻尼; k——悬架stcs 刚度,k ——轮胎刚度;x ——车身位移, x ——轮胎位移, x——路面位移; tstgF ——半主动控制力, Fb——磁流变阻尼器的可调阻尼系数。
d 半主动悬架是1974 年由美国加州大学戴维斯分校机械工程系D. E. Karnopp 教授等提出的,并利用天棚阻尼控制理论给出半主动悬架的控制策略,近十多年来,基于各种控制理论和磁流变阻尼器技术的半主动悬架控制策略相继发表,例LQR/LQG 控制、滑模变结构控制、自适应控制、人式神经网络控制、模糊控制、鲁棒控制等,相比较优这些较复杂的控制理论,天棚阻尼控制方法以其简单有效一直在半主动振动控制方面占有重要的一席之地。
基于天棚阻尼二系悬挂系统的半主动控制策略研究

基于天棚阻尼二系悬挂系统的半主动控制策略研究【摘要】本文研究基于天棚阻尼二系悬挂系统的半主动控制策略。
在我们讨论了研究背景、研究目的以及研究意义。
接着,介绍了天棚阻尼二系悬挂系统的原理,半主动控制原理,控制策略设计,仿真实验结果分析,以及性能评价指标。
在我们总结了半主动控制策略的有效性,并提出了未来研究方向。
本研究的结果表明基于天棚阻尼二系悬挂系统的半主动控制策略在提高车辆悬挂系统性能方面具有潜在的优势,为进一步研究和实践提供了重要参考。
【关键词】天棚阻尼二系悬挂系统,半主动控制策略,研究背景,研究目的,研究意义,控制原理,控制策略设计,仿真实验结果分析,性能评价指标,半主动控制策略的有效性,未来研究方向,总结。
1. 引言1.1 研究背景:随着汽车工业的不断发展,汽车悬挂系统在提高乘坐舒适性和行驶稳定性方面起着至关重要的作用。
传统的悬挂系统存在着无法适应不同道路状况和行驶速度的局限性,而半主动控制技术则被广泛应用于改善车辆的悬挂性能。
本研究旨在基于天棚阻尼二系悬挂系统,结合半主动控制原理,探讨一种有效的控制策略,以优化汽车悬挂系统的性能。
通过仿真实验结果的分析和性能评价指标的评定,验证该控制策略的有效性,为未来汽车悬挂系统的设计和应用提供理论支持和实践指导。
1.2 研究目的研究目的内容的字数要求为2000字。
研究旨在通过基于天棚阻尼二系悬挂系统的半主动控制策略研究,实现对车辆悬挂系统的更精准控制,提高车辆行驶的稳定性和舒适性。
具体目的包括:深入了解天棚阻尼二系悬挂系统的工作原理和特点,为后续研究奠定基础;探讨半主动控制原理在天棚阻尼二系悬挂系统中的应用,探讨不同控制策略对系统性能的影响;设计有效的控制策略,通过仿真实验验证控制策略的有效性,为实际应用提供理论支持;建立合理的性能评价指标,对半主动控制策略进行评价和比较,为优化改进提供依据。
通过本研究的开展,旨在为车辆悬挂控制领域的发展贡献新的研究成果和理论基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“天棚”阻尼控制
“天棚”阻尼是D.Karnopp 利用最优控制理论在1974 年提出来的一种悬架系统主动控制策略,其控制性能优越,具有一定的鲁棒性,但由于它是基于悬架速度的负反馈主动控制,对于移动的车辆来说无法实现。
但将“天棚”阻尼悬架系统作为控制的参考模型,即把“天棚”系统作为实际系统控制的动态目标得到广泛的应用。
但由于可调参数只有“天棚”阻尼系数,系统性能无法进一步提高。
本文采用天棚阻尼悬架作为研究对象,将分数阶微积分引入到“天棚”阻尼控制系统中,取代原来的整数阶导数。
以B级路面为输入信号,根据优化理论找到最优的阶数和阻尼系数。
最终,通过分析比较分数阶“天棚”阻尼悬架、整数阶“天棚”阻尼悬架和被动悬架,得出分数阶“天棚”阻尼悬架能够全面提高整数阶“天棚”阻尼悬架的性能。
1 车辆半主动悬架模型
车辆悬架按振动控制的方法分为被动、半主动、主动3 个类型,其中主动悬架可很好地提高车辆的乘坐舒适性和操纵稳定性,但因其价格昂贵、能耗高、结构复杂、可靠性差,限制了它的推广;被动悬架系统减震器的阻尼特性不能根据路面状况和车辆运行状态进行实时的调节,因而控制效果有限;半主动悬架相比于主动悬架,结构相对简单,能量消耗少,价格低廉,而性能接近主动悬架,特别是磁流变材料的出现,其应用前景非常良好。
以具有两自由度的1/4 车辆悬架模型作为研究对象,具有磁流变阻尼器的半主动悬架模型如图1 所示,其动力学方程:
式中,m——簧载质量,m——簧下质量; s——悬架结构阻尼; k——悬架stcs 刚度,k ——轮胎刚度;x ——车身位移, x ——轮胎位移, x——路面位移; tstgF ——半主动控制力, Fb——磁流变阻尼器的可调阻尼系数。
d 半主动悬架是1974 年由美国加州大学戴维斯分校机械工程系D. E. Karnopp 教授等提出的,并利用天棚阻尼控制理论给出半主动悬架的控制策略,近十多年来,基于各种控制理论和磁流变阻尼器技术的半主动悬架控制策略相继发表,例LQR/LQG 控制、滑模变结构控制、自适应控制、人式神经网络控制、模糊控制、鲁棒控制等,相比较优这些较复杂的控制理论,天棚阻尼控制方法以其简单有效一直在半主动振动控制方面占有重要的一席之地。
2(分数阶天棚阻尼悬架模型
2(1 天棚阻尼悬架模型
天棚阻尼控制实际是形象化的最优输出反馈控制方法,见图(2),其动力学方程为
这儿的b为天棚阻尼系数。
由于这种悬架只能是一种存在于实验室中的模型。
实际的汽车上并没有“天棚”作为惯性参考,该模型不能在实际悬架上应用,必须通过其它控制策略来间接实现,因此它被广泛地作为悬架控制的理想动力学模型应用于其它控制方法中。
根据D.KARNOPP的天棚阻尼半主动悬架理论,半主动悬架阻尼力的控制律为:
其中,f为天棚阻尼力,f为电流(或电压)最大时阻尼器的最大阻尼
力;skyMRmax
f为电流(或电压)最小(0 A)时阻尼器的最小阻尼力,以美国LORD公司生MRmin
产的RD-1005型磁流变阻尼器为例,此减振器允许的最大输入电流为2A,电压12V,最大阻尼力为4448N。
即通过阻尼器的电流(或电压)调节部分实现天棚阻尼控制。
2.2 分数阶天棚阻尼及半主动悬架控制策略
天棚阻尼半主动悬架,控制策略简单且效果理想,但它毕竟只是简单的一阶系统,控制效果无法进一步提高,而其它控制方法比较复杂,对控制器设计要求高,下面引入新的天棚阻尼控制方法,它不仅在性能上比经典的天棚阻尼算法的进一步的提高,而且其控制器的设计也不复杂,只是比原控制算法要求增加一些数据存贮和乘法和加法运算。
原天棚阻尼算法是对悬架速度的反馈,这种算法主要通过调整阻尼系数的大小改变控制力的值,无法改变控制力的相位,如果能实现任意调整控制力的大小和相位,则天棚阻尼控制的效果有望进一步提高。
为了实现这一想法,本文引入分数微积分思想,用对悬架位移的非整数阶导数代替原一阶导数即速度,即天棚阻尼控制力F 变为: d
α这儿的D表示为分数阶微分算子,其数学定义式常用的有Riemann-Liouville
定义
式中[?]代表取整数,当h 为小量时,(6)式就是(5)式的离散表达,因此分数阶导数的计算可以通过对函数的离散值进行加权和计算,这在控制器设计中是易实现的。
从优化角度看,式(3)中 b 是唯一的可优化值,而式(5)中,b 和α值都是可优化参数。
也就意味着,当我们优化参数b 取得最优值之后,可进一步优化参数α,使分数阶系统比整数阶系统有更好的性能。
考虑到悬架位移无法测量,可以利用指数定律,将(5)式变为
类似一般文献中半主动悬架的控制方法,按照能耗原则和分数阶天棚阻尼力的计算值,半主动控制力F 的控制策略为 d
2.3 控制参数的选取
为了确定式(6)最优的控制参数b和α,选择标准的B级随机路面激励路面谱为路面输入,路面谱在标准ISO,TCl08,SC2N67中的定义为
-1-1式中 n为空间频率(m),n=0.1m为参考空间频率, Gq(n)为参考空间频率n0002-1所对应的路面谱值,即路面不平度系数(m,m);ω为频率指数,决定路面谱的频
-62率结构,分级路面的频率指数ω,2。
对应于ISO的B级路面标准,
Gq(n)=64×10m0-1,m,构造出时域内的随机激励路面模型。
本文研究的某型号轿车的悬架参数如表1。
取控制泛函指标
其中q,i=1,2,3为加权因子。
在B 级公路路面行驶条件下对悬架进行仿真计算,i
得到(10)式中各项和综合指标J 在不同b 和α时的曲线(图3),当
α=0.21,b=4500 时指标J 取得极小值。
从图3a 可以看出,当α=0.31 时,加速度最小;当α=0.1 时,悬架动挠度最小;当α=0.17时,轮胎动载荷最小。
同时从图3a 中还可以看出,当α ? (0,0.1)时,四条曲线都单调递减,说明如果α 在此范围内取值,那么上述悬架状态都将变得更优异。
当选取α=0.21 时,加速度特性将更好,但悬架动挠度并非最优值。
3(分数阶系统的仿真
目前分数阶微积分的计算方法可分为三类,一类是解析法,其主要有基于双参数指数函数 Mittag—Leffler 函数的级数法、Adomian 分解法和平均法等;第二类为数值法,主要有差分法,样条函数法,预估校正法等;第三类为滤波器算法,例如Oustaloup 算法, FIR算法, IIR 算法和Pade 逼近等。
其中滤波器算法主动应用于仿真系统中的分数阶微积分的处理,其原理是用高阶的传递函数近似替代分数阶传递函数。
Oustaloup 算法是目前国际上最流行的近似法,首先按系统的要求选
择需近似处理的频率范围[ω, ω],考虑频域边界的影响,应选择更大的频率范围[ω, bhAω],要求ω<ω ,ω>ω ,然后在选择的范围内对分数阶微积分的拉氏变化进BAbBh
行近似处理,即
对于的计算采用零点和极点递归计算法
其中零点ω′和极点ω的递归计算公式
其中N为逼近函数的阶数,通常取5?10 足够,G满足下式: 0
5.结束语
汽车行驶的平顺性和操纵稳定性之间是相互矛盾的,悬架的天棚阻尼控制策略提高了汽车的平顺性,让乘客感到更舒适,但却牺牲了部分操纵稳定性。
为寻找更优异的控制效果我们将分数阶微积分理论引入到天棚阻尼控制策略中。
经过仿真比
较,我们发现分数阶天棚阻尼控制策略比整数阶控制策略有更好的行驶平顺性,而且并没有影响其操纵稳定性,相反地,若取得恰当的分数阶导数,其操纵稳定性还会略微提高。