直动式溢流阀的键合图建模与仿真分析
先导式溢流阀建模与仿真的探讨

先导式溢流阀建模与仿真的探讨0 引言在大多數液压系统中,溢流阀是一个不可缺少的压力控制元件,其通常的作用是维持系统压力的恒定,由于这种阀的动态性能对整个系统的性能有直接的影响,所以近年来国内外对溢流阀的静、动态特性研究的比较普遍[1-2]。
本文采用的是基于功率键合图的基本方法,以Y-25B型先导式溢流阀为例,建立先导式溢流阀的键合图模型,在20-sim软件上进行动态特性分析,研究溢流阀内部的结构参数及外部参数对其动态特性的影响,对提高溢流阀的性能甚至整个液压系统的可靠性有重要意义。
1 键合图法的基本原理键合图理论是20世纪50年代末首先由美国Paynter教授提出的[3]。
几十年来,以Kamopp DC和Rosenberg RC为代表的一批学者在此领域做了大量的研究工作[4]。
键合图是一种功率流图,它表示一个系统的输入功率在系统中的流向及在系统中各元上的作用情况,其实质是表示了系统中的能量变化、转换的形式及其相互的逻辑关系。
包含4种广义变量:势变量()、流变量()、变位变量()及动量变量()。
其中势、流为功率变量,变位变量及动量变量为能量变量。
在液压系统中,势变量和流变量分别对应于压力和流量。
功率键合图是彼此间用功率键连接起来的键图元的集合。
功率键是一个带有半箭头的有向短线段,半箭头的指向即表示键上功率的流向,见图1。
各键上的功率可视为系统总功率的分量,每根键上分别标有表示该功率的两个分量,如液压力与流量,功率的大小等于与的乘积。
图1 功率键示意图Fig.1 Power Bond schematic diagram2 20-sim 的功能和特点2.1 软件概述20-sim软件被广泛用于航空航天、汽车、制造、工程、化学等领域的设计、建模和仿真的研究中。
其最大特点是可以实现基于键合图的自动建模与仿真。
除此之外,还支持方块图、图标、方程形式的建模。
2.2 建模方式20-sim拥有一个门类齐全的模型库,提供了大量预先定义好的模型,分为键合图、图标、信号和系统四个部分。
基于20sim的典型液压系统建模仿真解读
基于20-sim 的液压系统键图建模与仿真前言本文在20-sim 环境下,以典型液压系统为对象,建立了液压管道、液压泵、溢流阀等元件的键合图模型与整个系统的键合图模型,用实际参数进行动态仿真,其仿真结果表明,得到的活塞杆响应速度、泵的输出压力以及液压缸工作压力的动态变化正确合理,通过键合图建立的模型可以用20-sim 软件进行参数的选择与优化研究。
1 典型液压系统典型液压系统由油泵、溢流阀、电液比例控制系统等部分组成,其回路如图1所示。
油泵1为系统提供动力,溢流阀2用于卸荷,比例控制阀3主要完成主压力的调整、卸荷、油流转换等功能,油缸4用于驱动负载5,油箱6为系统提供油源,并存储工作油液。
图1 典型液压系统回路2 典型液压系统键合图模型在液压系统中,组件间的负载效应及系统中功率流动情况都可以用功率键合图图形的方式描述。
液压系统和键合图元的对应关系如表1所示。
表1 液压系统和键合图元的对应关系液压系统液容液感液阻负载体积压动量压力流量键合图元CIRSeq(tp(te(tf(t2.1 液压泵键合图模型液压泵是液压系统中的能量转换元件,将机械能转换成液压能。
变量泵的动态模型用图2所示的键合图模拟,其中,R l 表示泄漏液阻,R f 表示转动部分的摩擦,Cy 表示压油腔的液容,MTF 是一个调制变换器,其变换比1/k是可变参数C 的函数,对于径向柱塞泵,C 是斜盘的倾角。
CCbRR100SfSf1图2 泵的键合图模型在液压泵中,产生泄漏的缝隙一般很小,泄漏都是层流流动,泄漏液阻可以看作与泵的输出压力成正比。
根据泵的容积效率的定义可以求得泵的泄漏液阻qn PR V 1(1η-=(1式中,P ,ηV ,q ,n 分别代表泵的输出压力、容积效率、排量和转速。
假设液压泵的泄漏系数K L =1/Rl ,泵的液容KVC y = (2其中V ,K 分别是液压泵的容积和油液体积弹性模量。
2.2 电磁溢流阀键合图模型溢流阀的响应速度比较快,在此可以忽略它的动态特性,只考虑它的静态特性。
直动式减压阀压力特性与流量特性仿真

当流量增加时,阀口开度增加,P2 会减小;当 P1 增加时,为了保证流量不变,阀口
开度会减小,P2 会增加。由于减压阀在工作时在阀口处还受到稳态液动力,因此有:
(
)
小孔处气体流速为
流经小孔的的流量为
小孔面积:
(
)
如果忽略小孔稳态液动力的话,则有:
根据起受力分析以及锥形阀流量与压力的关系可以得到
其中 Pb 大气压强,取 三,仿真实验与结果
二、受力分析 作用在主阀芯及膜片受力分析:
“向上的力”有 P1 作用在主阀芯底部的力,P2 作用在膜片上的向上的力;“向下的力” 有弹簧力 FS,P2 作用在主阀芯的向下的力假设作用在主阀芯的面积为 A2,大气对于膜片
向下的力,弹簧预紧压缩量为 X0,弹簧刚度为 K,阀口开度为ΔX,则力学平衡方程如下:
2、压力特性分析: 由受力分析可知气体 P1-P2 的关系如下
取 q=500dm3/min,通过 matlab 作图得到 P1—P2 图像如下图所示
其 matlab 程序如下: r1=0.015;%主阀芯底部半径 A1=1.257;%主阀芯底部作用面积 A2=6.362;%P2 作用膜片面积(上部) K=167000;%弹簧刚度 T=293;%温度 R=8.31;%气体状态常数 Pb=1e6;%大气压 k=2; P1=1000:10000:1e8;%入口处压力 P2=1000:1000:1e7;%将 P2 从 1000 变到 1000000,其中每次变化的数值为 1000 q=500;%初始流量 a=45;%主阀芯底部倾斜角 Cv=0.98;
Cq=0.7; for i=1:10000 P2(i)=Pb*A2+K*((2*r1/sin(a))^2-sqrt(2*q/(Cq*Cv*pi*P1(i)*(P2(i)/P1(i).^(2/k)-P2(i)/P 1(i).^(1+1/k))*sinቤተ መጻሕፍቲ ባይዱa)*sqrt(2*k/(R*T*(k-1))))))/(A1+A2); end plot(P1,P2) xlabel P1 ylabel P2 由 matlab 仿真图像可知,在 P1 增加时,为了保证流量恒定,由于阀口开度的减小,导致 P2 的增加,而其增加的趋势也不与 P1 成线性关系。这一点与理想状态有很大的差距。 四、作业感想
功率键合图

有相等的电压值,而输入电流值等于输出
的电流值即在该节点上输入、输出电流的
代数和为零。
p2q2
p1q1
p
p3q3
p2 q2
p1 o p3
q1
q3
p1=p2=p3 q1-q2-q3=0
用o结点表示三通管路
b.1结点-相当于一个串联电路,在该节点上电流相等, 而上流的电压值等于下流的电压值加上该电
路中的电压损耗值,即电压的代数和为零。
利用功率键合图和MATLAB进行液压系统的 数字仿真,不仅可以对液压系统的动态特性进行 仿真分析,还可以通过改变仿真条件对液压系统 的工作过程进行仿真试验。
用键合图和MATLAB进行数字仿真应注意的几个 问题:
(1)功率键合图全过程的代表性 (2)关于功率的流向 (3)功率键合图中各变量的关系 (4)MATLAB仿真程序的选择 (5)MATLAB仿真算法的选择
p1
p3
q1
△p=p2
p2 q2
p1 1 p3
q1
q3
p1=p2+p3
用1结点表示带有液阻的管路
q1=q2=q3=q
c. 变换器TF(transformer)
TF是一种能量变换器 用于不同类 型能量之间的转换; 或同类型能量 之间的转换。
表示形式:
e1 f1
TF :m
e2 f2
e1m=e2 f2=f1/m
阀体 上阻 尼孔 参数 值的 仿真 曲线
(a)R1=2.063e8 (b)R1=2.063e9
(c)R1=2.063e10
(d)R1=2.063e11
结果分析
一般的分析认为,这种结构的先导式溢流阀的阀体 上阻尼孔的作用主要为在油液流过阻尼孔之后,当先导 腔的压力达到系统调定的压力之后,先导阀芯开启,油 液经过阀体上的阻尼孔时有压力损失,使主阀芯上、下 腔产生压力差,在压力差的作用下主阀芯开启溢流。
合肥工业大学-直动式溢流阀仿真

计算机仿真直动式溢流阀仿真实验班级:机设13-4班学号: 2013210360姓名:杨尚武授课教师:翟华日期: 2016年4月13日一、实验目的本实验要求学生能掌握连续系统仿真的一般过程,状态变量法的一般过程,键合图法仿真的一般过程,以四阶定步长龙格——库塔法的计算机程序的编写。
二、实验要求本实验要求学生能掌握连续系统仿真的一般过程,状态变量法的一般过程,键合图法仿真的一般过程,以及四阶定步长龙格—库塔法的计算机程序的编号要求每个学生参考上述源程序,独立编写C语言源程序或其他高级语言程序,正确计算仿真结果,并绘制压力P(t)和时间t的关系图,以及阀芯位移x(t)和时间t的关系。
三、参考C语言程序#include "stdio.h"#include "math.h"void main(){FILE * fp;int i,j,e,g,l,s,n1,n2,b[3][2];float d1,r1,r2,i1,c1,c2,x1,h1,a1,c,p0,pp,q1,x2,t;float a[3][3],y[3],u[2],k[3][5],h[5],p[3][5],z[3],d[3][5];if((fp=fopen("fz1","wb"))==NULL){printf("cannot open file\n");}fprintf(fp,"digital simulation of hydraulic relief valve\n");d1=0.012;r1=0.39e+11;r2=0.147e+12;i1=0.0614;c1=0.8e-12;c2=0.2e-4;x1=0.0014;p0=0.6e+6;pp=0.3e+7;q1=0.46e-3;h1=0.0003;t=0.0;n1=5;n2=55;a1=0.785*d1*d1;a[0][0]=-a1*a1*r1/i1;a[0][1]=-1.0/c2;a[0][2]=a1/c1;a[1][0]=1/i1;a[1][1]=0.0;a[1][2]=0.0;a[2][0]=-a1/i1;a[2][1]=0.0;a[2][2]=-1/(r2*c1);for (i=0;i<=2;i++){for (j=0;j<=1;j++)b[i][j]=0;}b[0][0]=-1;b[2][1]=1;y[0]=0.0;y[1]=0.0;y[2]=p0*c1;x2=q1/(0.7*3.14*d1*sqrt(2.0*pp/900.0));u[0]=pp*a1-(x1+x2)/c2;u[1]=q1;c=-0.7*3.14*d1*sqrt(2.0/900.0);for(i=0;i<=2;i++){k[i][0]=0.0;}h[0]=0.0;h[1]=h1/2.0;h[2]=h1/2.0;h[3]=h1;fprintf(fp," T P(T) X(T)\n"); for (e=1;e<=n2;e++){for (g=1;g<=n1;g++){t=t+h1;for(j=1;j<=4;j++){for(i=0;i<=2;i++){p[i][j]=h[j-1]*k[i][j-1];z[i]=y[i];z[i]=z[i]+p[i][j];}if(z[1]<0.0) z[1]=0.0;if(y[1]==0.0&&z[0]<0.0)z[0]=0.0;if(z[2]<0.0) z[2]=0.0;for (i=0;i<=2;i++){d[i][j]=0.0;for(l=0;l<=2;l++){d[i][j]=d[i][j]+a[i][l]*z[l];}k[i][j]=d[i][j];for(s=0;s<=1;s++){k[i][j]=k[i][j]+b[i][s]*u[s];}}if(y[1]==0.0&&k[0][j]<0.0)k[0][j]=0.0;if(y[1]==0.0&&k[1][j]<0.0)k[1][j]=0.0;if(y[2]==0.0&&k[2][j]<0.0)k[2][j]=0.0;if(y[1]>x1){k[2][j]=k[2][j]+c*(z[1]-x1)*sqrt(z[2]/c1);if(y[2]==0.0&&k[2][j]<0.0) k[2][j]=0.0;}}for(i=0;i<=2;i++){y[i]=y[i]+h1*(k[i][1]+2*k[i][2]+2*k[i][3]+k[i][4])/6.0; }if(y[1]<0.0)y[1]=0.0;if(y[1]==0.0&&y[0]<0.0)y[0]=0.0;if(y[2]<0.0)y[2]=0.0;}fprintf(fp,"%7.5f %e %e\n",t,y[2]/c1,y[1]); }}四、输出结果digital simulation of hydraulic relief valveT P(T) X(T)0.00150 1.449418e+06 0.000000e+000.00300 2.288071e+06 0.000000e+000.00450 3.099895e+06 1.151061e-040.00600 3.868414e+06 4.654126e-040.00750 4.600404e+06 1.006565e-030.00900 4.988608e+06 1.692020e-030.01050 3.161974e+06 2.095751e-03 0.01200 1.816280e+06 1.854696e-03 0.01350 1.982722e+06 1.433021e-03 0.01500 2.839527e+06 1.252615e-03 0.01650 3.644874e+06 1.364071e-03 0.01800 3.882667e+06 1.673995e-03 0.01950 3.016941e+06 1.839893e-03 0.02100 2.377060e+06 1.706981e-03 0.02250 2.531030e+06 1.497600e-03 0.02400 3.156087e+06 1.446740e-03 0.02550 3.501333e+06 1.583777e-03 0.02700 3.186811e+06 1.717583e-03 0.02850 2.736281e+06 1.695083e-03 0.03000 2.673098e+06 1.579036e-03 0.03150 2.970536e+06 1.515308e-03 0.03300 3.243553e+06 1.563448e-03 0.03450 3.179934e+06 1.648301e-03 0.03600 2.923158e+06 1.665780e-03 0.03750 2.805473e+06 1.611564e-03 0.03900 2.920318e+06 1.561015e-03 0.04050 3.096681e+06 1.568833e-03 0.04200 3.124609e+06 1.614838e-03 0.04350 3.001740e+06 1.639431e-03 0.04500 2.899607e+06 1.619705e-03 0.04650 2.925323e+06 1.587159e-03 0.04800 3.023885e+06 1.580377e-03 0.04950 3.071301e+06 1.601658e-03 0.05100 3.024275e+06 1.621452e-03 0.05250 2.955756e+06 1.617937e-03 0.05400 2.946312e+06 1.600020e-03 0.05550 2.993725e+06 1.590586e-03 0.05700 3.033829e+06 1.598347e-03 0.05850 3.023208e+06 1.611109e-03 0.06000 2.984370e+06 1.613578e-03 0.06150 2.966569e+06 1.605188e-03 0.06300 2.985009e+06 1.597548e-03 0.06450 3.011714e+06 1.598983e-03 0.06600 3.015217e+06 1.606013e-030.06750 2.996430e+06 1.609634e-03 0.06900 2.980998e+06 1.606533e-03 0.07050 2.985335e+06 1.601573e-03 0.07200 3.000486e+06 1.600654e-03 0.07350 3.007349e+06 1.603957e-03 0.07500 2.999997e+06 1.606921e-03 0.07650 2.989607e+06 1.606318e-03 0.07800 2.988369e+06 1.603569e-03 0.07950 2.995737e+06 1.602179e-03 0.08100 3.001721e+06 1.603411e-03 0.08250 2.999946e+06 1.605345e-03五、实验报告1.直动式溢流阀键合图模型是:2.直动式溢流阀系统状态方程是:1214321221211211121212121)111(11I R A p Q V C R R R p I A V p IxS V C A x C p e ++---==-+--=3.系统压力随时间变化曲线为:4.阀芯位移随时间变化的曲线为:。
大流量溢流阀的压力特性AMESim仿真分析
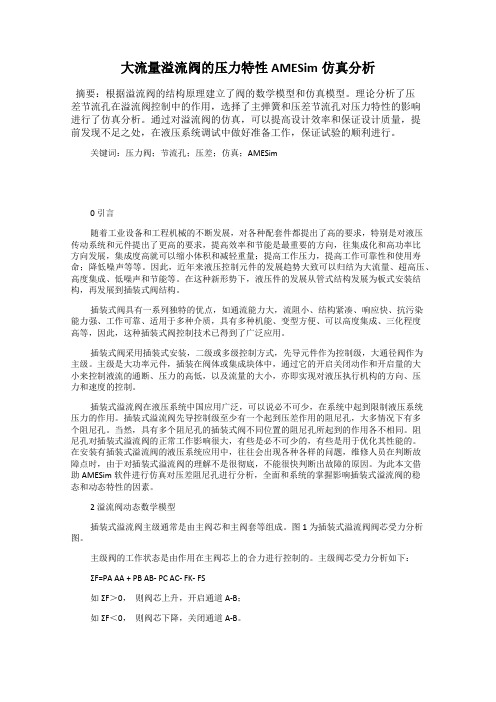
大流量溢流阀的压力特性AMESim仿真分析摘要:根据溢流阀的结构原理建立了阀的数学模型和仿真模型。
理论分析了压差节流孔在溢流阀控制中的作用,选择了主弹簧和压差节流孔对压力特性的影响进行了仿真分析。
通过对溢流阀的仿真,可以提高设计效率和保证设计质量,提前发现不足之处,在液压系统调试中做好准备工作,保证试验的顺利进行。
关键词:压力阀;节流孔;压差;仿真;AMESim0 引言随着工业设备和工程机械的不断发展,对各种配套件都提出了高的要求,特别是对液压传动系统和元件提出了更高的要求,提高效率和节能是最重要的方向,往集成化和高功率比方向发展,集成度高就可以缩小体积和减轻重量;提高工作压力,提高工作可靠性和使用寿命;降低噪声等等。
因此,近年来液压控制元件的发展趋势大致可以归结为大流量、超高压、高度集成、低噪声和节能等。
在这种新形势下,液压件的发展从管式结构发展为板式安装结构,再发展到插装式阀结构。
插装式阀具有一系列独特的优点,如通流能力大,流阻小、结构紧凑、响应快、抗污染能力强、工作可靠、适用于多种介质,具有多种机能、变型方便、可以高度集成、三化程度高等,因此,这种插装式阀控制技术已得到了广泛应用。
插装式阀采用插装式安装,二级或多级控制方式,先导元件作为控制级,大通径阀作为主级。
主级是大功率元件,插装在阀体或集成块体中,通过它的开启关闭动作和开启量的大小来控制液流的通断、压力的高低,以及流量的大小,亦即实现对液压执行机构的方向、压力和速度的控制。
插装式溢流阀在液压系统中国应用广泛,可以说必不可少,在系统中起到限制液压系统压力的作用。
插装式溢流阀先导控制级至少有一个起到压差作用的阻尼孔,大多情况下有多个阻尼孔。
当然,具有多个阻尼孔的插装式阀不同位置的阻尼孔所起到的作用各不相同。
阻尼孔对插装式溢流阀的正常工作影响很大,有些是必不可少的,有些是用于优化其性能的。
在安装有插装式溢流阀的液压系统应用中,往往会出现各种各样的问题,维修人员在判断故障点时,由于对插装式溢流阀的理解不是很彻底,不能很快判断出故障的原因。
应用键合图法仿真溢流阀动态性能
应用键合图法仿真溢流阀动态性能
崔维娅
【期刊名称】《石家庄铁道大学学报:自然科学版》
【年(卷),期】1991(000)003
【摘要】本文应用键合图法建模,对差动式单级溢流阀的动态过程进行了数字仿真研究,预测了某些结构参数改变后对动态性能的影响,并经实验证明了动态模型的正确性。
【总页数】6页(P37-42)
【作者】崔维娅
【作者单位】石家庄铁道学院机械系
【正文语种】中文
【中图分类】N
【相关文献】
1.仿真直动式溢流阀瞬态响应的键合图法 [J], 郑红梅
2.基于功率键合图的液压节流调速动态性能仿真研究 [J], 张立军;赵升吨;陈晓华
3.基于键合图和SIMULINK的比例溢流阀建模与仿真 [J], 周伟安;沈雪明;柯敏
4.利用功率键合图和SIMULINK实现溢流阀的动态仿真 [J], 胡勇;周建军;贾方
5.用功率键合图计算机模拟仿真分析西德高压型溢流阀的动态特性 [J], 杨征瑞因版权原因,仅展示原文概要,查看原文内容请购买。
最新直动式溢流阀的键合图建模与仿真分析电子教案

直动式溢流阀的键合图建模与仿真分析溢流阀一种压力控制阀,在液压设备中主要起定压溢流作用,稳压作用,系统卸荷作用和安全保护作用。
系统正常工作时,阀门关闭,只有负载超过规定的极限(系统压力超过调定压力)时开启溢流,进行过载保护,使系统压力不再增加。
将直动式溢流阀并联在液压缸的两腔,手动调节溢流压力,可以当做模拟负载器。
1 液压系统及动态过程任何一个液压元件总是在某一定的液压系统中工作的。
在绘制功率键合图,进行动态分析时,总是针对某一具体动态过程进行研究的。
本研究的直动式溢流阀调压系统的液压原理图如图1所示。
在图中所示情况下,液压泵的供油经电磁阀流回油箱,当电磁阀突然通电关闭时,直动式溢流阀由原来的关闭状态到打开溢流,直到系统达到新的静平衡状态的瞬态响应过程。
图1 直动式溢流阀调压系统的液压原理图在上图中,因重点研究的是溢流阀,因此对溢流阀本身的影响特性的因素考虑的多一点,其他不必要的可忽略不计。
为了便于分析,需要画出直动式溢流阀的的结构简图,该结构简图及其与系统其他部分的关系如图2。
图2 所研究系统的结构简图在建立数学模型时,所考虑的的影响因素主要有:溢流阀本身的弹簧柔度C弹、阀芯质量I阀、阀口液阻R阀、阻尼孔液阻R孔,及阀芯底部控制油压力p控。
此外,系统其他部分考虑的因素有:泵的泄露液阻R泄、管道(主要是软管)液容C管及模拟负载的节流阀液阻R节。
2 功率键合图按照键合图理论,描述一个系统主要使用容性元件C、阻性元件R、惯性元件I、流源S f、力源Se、转换器TF。
将这些基本元件按照功率流程连接起来,构成系统的键合图,如图3。
图3 功率键合图图中带箭头的直线表示功率键,箭头表示功率流向。
每一根功率键上有表示构成功率的两个变量,一般用力变量e和流变量f表示,但在传递不同类型能量的系统中,力变量和流变量各有其不同的物理变量。
每根键上的变量都有脚标,以示区别。
图中功率流程是从左向右的。
第一个结点是0结点,表示定量泵供给的具有确定流量q1的流源Sf,在同一压力下有5个分支功率从容腔流出,其中有4个是受作用元控制的,即控制泵泄漏量q3的泄露液阻R泄、控制管道中油液压缩所补充的流量q2的液容C管、控制供给负载流量q4的节流阀液阻R节以及控制溢流量q5的溢流阀阀口液阻R阀,另一个分支功率是用于控制阀芯运动的P6.q6。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直动式溢流阀的键合图建模与仿真分析溢流阀一种压力控制阀,在液压设备中主要起定压溢流作用,稳压作用,系统卸荷作用和安全保护作用。
系统正常工作时,阀门关闭,只有负载超过规定的极限(系统压力超过调定压力)时开启溢流,进行过载保护,使系统压力不再增加。
将直动式溢流阀并联在液压缸的两腔,手动调节溢流压力,可以当做模拟负载器。
1 液压系统及动态过程任何一个液压元件总是在某一定的液压系统中工作的。
在绘制功率键合图,进行动态分析时,总是针对某一具体动态过程进行研究的。
本研究的直动式溢流阀调压系统的液压原理图如图1所示。
在图中所示情况下,液压泵的供油经电磁阀流回油箱,当电磁阀突然通电关闭时,直动式溢流阀由原来的关闭状态到打开溢流,直到系统达到新的静平衡状态的瞬态响应过程。
图1 直动式溢流阀调压系统的液压原理图在上图中,因重点研究的是溢流阀,因此对溢流阀本身的影响特性的因素考虑的多一点,其他不必要的可忽略不计。
为了便于分析,需要画出直动式溢流阀的的结构简图,该结构简图及其与系统其他部分的关系如图2。
图2 所研究系统的结构简图在建立数学模型时,所考虑的的影响因素主要有:溢流阀本身的弹簧柔度C弹、阀芯质量I阀、阀口液阻R阀、阻尼孔液阻R孔,及阀芯底部控制油压力p控。
此外,系统其他部分考虑的因素有:泵的泄露液阻R泄、管道(主要是软管)液容C管及模拟负载的节流阀液阻R节。
2 功率键合图按照键合图理论,描述一个系统主要使用容性元件C、阻性元件R、惯性元件I、流源S f、力源Se、转换器TF。
将这些基本元件按照功率流程连接起来,构成系统的键合图,如图3。
图3 功率键合图图中带箭头的直线表示功率键,箭头表示功率流向。
每一根功率键上有表示构成功率的两个变量,一般用力变量e和流变量f表示,但在传递不同类型能量的系统中,力变量和流变量各有其不同的物理变量。
每根键上的变量都有脚标,以示区别。
图中功率流程是从左向右的。
第一个结点是0结点,表示定量泵供给的具有确定流量q1的流源Sf,在同一压力下有5个分支功率从容腔流出,其中有4个是受作用元控制的,即控制泵泄漏量q3的泄露液阻R泄、控制管道中油液压缩所补充的流量q2的液容C管、控制供给负载流量q4的节流阀液阻R节以及控制溢流量q5的溢流阀阀口液阻R阀,另一个分支功率是用于控制阀芯运动的P6.q6。
第二个结点是1结点,表示功率流p6.q6在同一流量下又分成两个功率流,其一是受阻尼孔液阻R孔控制,具有压力损失p7,相应的功率损失为p7.q7,另一支液压功率流p8.q8,经变换器TF转换成机械功率F9.v9,作用在阀芯底部来控制阀芯运动。
最后一个结点为1结点,功率流F9.v9在同一运动速度下,其力变量F 经3个分支功率流,分别用于克服弹簧的预压紧力F10、弹簧继续受压产生的弹性力F11、以及用于克服惯性力F12以产生阀芯的加速度a12 。
3 状态方程3.1 确定状态变量在推导系统动态过程的数学模型——状态方程时,首先要确定状态变量系统的状态方程是一阶微分方程组,在其变量间有导数关系;而在系统的功率键合图中,只有储能作用元,(容性元C 和感性元I )中才有导数或积分关系,所以应当从C 和I 作用元各自的变量间取一个变量作为状态变量。
对于C 作用元,其自变量为流变量,力变量与流变量间的关系有⎰=vdt C F 1或⎰=qdt C p 1对于I 作用元,其自变量为力变量,流变量与力变量间的关系有⎰=Fdt I v 1或⎰=pdt Iq 1为了便于建立状态方程,可以取C 元和I 元功率键上自变量对时间的积分为状态变量,即在以下各式中:⎰⎰==V qdt x vdt , 和 ⎰⎰==P pdt P Fdt ,取液体体积V 、运动件位移x 、固体或液体动量P 为状态变量,这些状态变量的一阶导数即为原来的自变量。
这样原来的功率键上的变量之间的积分关系就可以转换为状态变量和原来的因变量之间的代数关系,即 v C p x C F 1,1== 和 P Iq P I v 1,1==按照上述方法,在图2-1所示的直动式溢流阀的功率键合图中,C 管和C 弹功率键上的自变量分别为流量q2和速度v11;I 阀功率键上的自变量为F12,取自变量对时间的积分为状态变量,即12121111,,2F P v x q V === 3.2 推导状态方程① 先写出功率键合图中储能元功率键上原来因变量与状态变量间的关系,即12121P I v 阀=, 11111x C F 弹=, 212V C p 管= ② 应用键合图的规则及其变量间的逻辑关系,将各状态变量的一阶导数推导成储能元功率键上的因变量及输入变量的代数式函数关系,如下列各式:12222121111111222118111091212)111(Av p R R R S q V v v xF S v R A Ap F S Ap F F F F P f e e -++-====---=--=--==阀节泄孔③ 将第一步中的各关系式带入第二步中,并在所得的右端的代数式中,按所列函数的顺序写出状态变量P12、x11、V2的各项,再写出输入变量的各项。
如下列各式:⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧+++--==-+--=fe S V C R R R P I A V P I x S V C A x C P I R A P 21221211211122121)111(11管阀节泄阀阀管弹阀孔 这就是一个三阶的状态方程,它由3个一阶微分方程组成。
当电磁阀关闭时,∞=节R ,即01=节R 。
由R 节可以确定系统压力的初始值。
在确定溢流阀口液阻R 阀时,当溢流阀阀芯的位移量x11未超过阀口的遮盖量x1时,无溢流,∞=阀R ,当x11>x1时,才有溢流,此时2111211122)(22)(V x x C dC p x x d C Q R p R C V d d -=-===管溢阀阀管ρπρπ式中 C d ——阀口的流量系数;d ——阀芯直径;ρ——油液密度。
可以看出Q 溢是x 11和V 2的非线性函数。
因此系统的模型也必须用非线性的状态方程表示,即⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧>--+++--=≤+++--==-+--=)( )(21)111( 1)111(11111211121221112122121121112212x x V x x C d C S V C R R R P I A V x x S V C R R R P I A V P I x S V C A x C P I R A P d f f e 管管阀节泄阀管阀节泄阀阀管弹阀孔)(ρπ3.3 确定状态方程中的各量值阀芯承压面积24d A π=,取d=1.2cm ,得A=1.13cm 2 ;移动件的等效质量kg m m I 2-1015.631⨯=+=弹阀阀;阻尼孔液阻3/1092.34cm s Pa R ⋅⨯=孔; 弹簧柔度C 弹=0.002cm/N ; 泄油液阻35/1047.1cm s Pa R ⋅⨯=泄; 软管液容3/108.06-cm Pa C ⨯=管;阀芯的遮盖量取x1=0.14cm ,弹调C x x A p Se /)21(+-⋅=,s m S f /106.434-⨯=。
4 Matlab 仿真在仿真过程中需对模型加3个约束。
①011≥x ,;②02≥P ,否则为0;③011=x 时,F 12<0,令F 12=0。
用Matlab 仿真对直动式溢流阀进行动态仿真,程序清单如附录所示,得到阀出口油压P2和阀芯位移的仿真曲线,如图4-(a)和4-(b)所示。
(a )溢流阀压力曲线图(b )阀芯位移曲线图 图4 直动式溢流阀动态仿真曲线从仿真结果看出,直动式溢流阀在以上参数下,经历0.01s 后,基本趋于稳定,在阀芯位移为0.15cm 时,溢流阀的压力稳定在30bar 左右不变。
压力超调量%30%73303052>=-=∆=p p η 压力/bar时间/s时间/s位移/cm附录:%define the sequence of the programfunction syms[A,B,U,Y,M]=defination_matrix();[H,D,I,R1,C2,C1,R2,P,Cd,RO,Q0,X1,P0,G]=input_parameters();[X2,C,A1] = calculation_parameters(Q0,Cd,P,R2,D,RO,G);[M]=calculation_matrix(M,A,B,U,Y,I,R1,C2,C1,R2,P0,P,X1,X2,A1,Q0,H ,C);graph_plot(M);function [A, B ,U, Y, M] = defination_matrix()%A_state_matrixA=zeros(3,3);%B_input_matixB=zeros(3,2);%U_input_vectorU=zeros(2,1);%Y=_state_vectorY=zeros(3,1);%output_matrixM=zeros(1000,4)function[H,D,I,R1,C2,C1,R2,P,Cd,RO,Q0,X1,P0,G] = input_parameters()%步长H(s),阀芯直径D(cm),惯性质量I(kg),阀孔阻尼R1(bar_s/cm3),弹簧柔度C2(cm/kg),%管道液容C1(cm3/bar),泄油系数Cd,油液密度RO(kg/cm3),泵理论流量Q0(cm3/s), %阀口遮盖量X1(cm),重力加速度G(cm/s2)H=6e-5;D=1.2;I=6.3e-5;R1=0.4;R2=1.5;C2=0.02;C1=0.08;P=30;Cd=0.7;RO=0.0009;Q0=460;X1=0.14;P0=6;G=981;function[X2,C,A1]=calculation_parameters(Q0,Cd,P,R2,D,RO,G)PI=3.1415926;X2=(Q0-P/R2)/(Cd*PI*D*sqrt(2*G*P/RO));C=-Cd*PI*D*sqrt(2*G*P/RO);A1=PI*D*D/4;function[M]=calculation_matrix(M,A,B,U,Y,I,R1,C2,C1,R2,P0,P,X1,X2 ,A1,Q0,H,C)T=0;A(1,1)=-A1*A1*R1/I; A(1,2)=-1/C2; A(1,3)=A1/C1;A(2,1)=1/I; A(3,1)=-A1/I; A(3,3)=-1/(R2*C1);B(1,1)=-1; B(3,2)=1;U(1)=P*A1-(X1+X2)/C2; U(2)=Q0;Y(1)=0; Y(2)=0; Y(3)=P0*C1;M(1,1)=0; M(1,2)=Y(1)/I; M(1,3)= Y(2);M(1,4)=P0;for j=1:5000[Y,T]=R_T(A,B,U,Y,H,X1,C,C1,T);M(j+1,1)=T; M(j+1,2)=Y(1)/I; M(j+1,3)=Y(2); M(j+1,4)=Y(3)/C1;endfunction[Y,T]=R_T(A,B,U,Y,H,X1,C,C1,T)%constrainif Y(2)<0Y(2)=0;endif Y(2)==0&&Y(1)<0Y(1)=0;end%nonlinear_situationif Y(2)>X1A(3,3)=A(3,3)+C*(Y(2)-X1)*sqrt(Y(3)/C1); endW=1/3*[0.5,1,1,0.5];Q=[0.5,0.5,1,0];TW=T; BB=Y; YW=Y;%初始化for i=1:4Dy=A*Y+B*U;T=TW+W(i)*H;Y=YW+H*Q(i).*Dy;BB=BB+H*W(i).*Dy;endY=BB;if Y(2)<0Y(2)=0;elseif Y(2)==0&&Y(1)<0Y(1)=0;endendfunction graph_plot(M)%%plot_graphfigure(1);plot(M(:,1),M(:,2))figure(2);plot(M(:,1),M(:,3))figure(3);plot(M(:,1),M(:,4));。