第2章 控制系统的数学模型习题答案
《控制工程基础》课程作业习题(含解答)
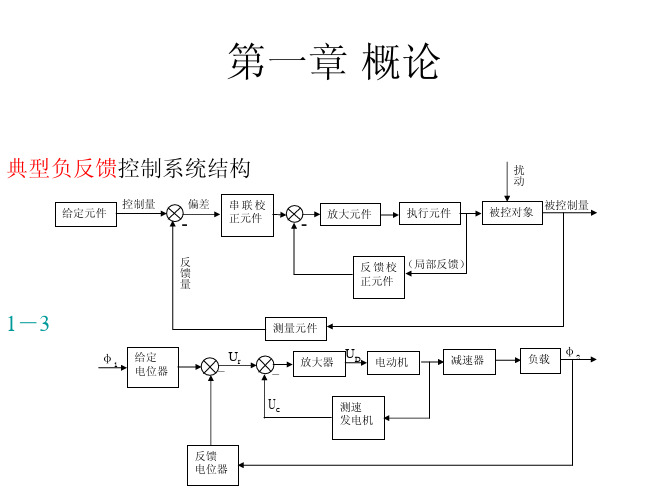
第一章概论本章要求学生了解控制系统的基本概念、研究对象及任务,了解系统的信息传递、反馈和反馈控制的概念及控制系统的分类,开环控制与闭环控制的区别;闭环控制系统的基本原理和组成环节。
学会将简单系统原理图抽象成职能方块图。
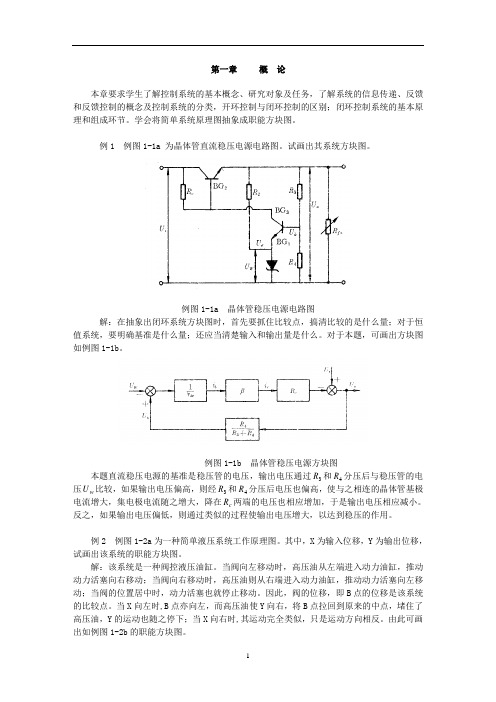
例1 例图1-1a 为晶体管直流稳压电源电路图。
试画出其系统方块图。
例图1-1a 晶体管稳压电源电路图解:在抽象出闭环系统方块图时,首先要抓住比较点,搞清比较的是什么量;对于恒值系统,要明确基准是什么量;还应当清楚输入和输出量是什么。
对于本题,可画出方块图如例图1-1b。
例图1-1b 晶体管稳压电源方块图本题直流稳压电源的基准是稳压管的电压,输出电压通过R和4R分压后与稳压管的电3压U比较,如果输出电压偏高,则经3R和4R分压后电压也偏高,使与之相连的晶体管基极w电流增大,集电极电流随之增大,降在R两端的电压也相应增加,于是输出电压相应减小。
c反之,如果输出电压偏低,则通过类似的过程使输出电压增大,以达到稳压的作用。
例2 例图1-2a为一种简单液压系统工作原理图。
其中,X为输入位移,Y为输出位移,试画出该系统的职能方块图。
解:该系统是一种阀控液压油缸。
当阀向左移动时,高压油从左端进入动力油缸,推动动力活塞向右移动;当阀向右移动时,高压油则从右端进入动力油缸,推动动力活塞向左移动;当阀的位置居中时,动力活塞也就停止移动。
因此,阀的位移,即B点的位移是该系统的比较点。
当X向左时,B点亦向左,而高压油使Y向右,将B点拉回到原来的中点,堵住了高压油,Y的运动也随之停下;当X向右时,其运动完全类似,只是运动方向相反。
由此可画出如例图1-2b的职能方块图。
例图1-2a 简单液压系统例图1-2b 职能方块图1.在给出的几种答案里,选择出正确的答案。
(1)以同等精度元件组成的开环系统和闭环系统,其精度比较为_______ (A )开环高; (B )闭环高; (C )相差不多; (D )一样高。
(2)系统的输出信号对控制作用的影响 (A )开环有; (B )闭环有; (C )都没有; (D )都有。
《控制理论CAI教程》答案
k
Pk Δk
而信号流程图的特征式Δ Δ=1-(所有不同回路的增益之和)
+(每两个互不接触回路增益乘积之和)
-(每三个互不接触回路增益乘积之和)
第二章 控制系统的数学模型
2.7
1.初始条件为0时,H
(s)
=
s2
1 + 3s
+1
=
C(s) R(s)
现s2c(s) − sc(0) − c' (0) + 3sc(s) − 3c(0) + c(s) = R(s)
5−3 5 2
2.ess = 6
第二章 控制系统的数学模型
习题练习
Z1
Uc1
C1
+
Ui
R1
_
L
+ i
R2 Uo Z2
Uc2
C2 _
(1) 列出系统的微分方程; (2) 确定其传递函数 (系统初值为零)
解:由基尔霍夫电压、电流 定律的系统微分方程:
ui
=
uc1
+
L
di dt
+
R2i
+ uc2
i
=
C1
第二章 控制系统的数学模型
2-2 (a) C
R
-
R
+ ui
R uo
ui + ui − uo = 0 R R+ 1
Cs
传递函数G = uo 而非 ui
ui
uo
第二章 控制系统的数学模型
2-2 (b)
2R u3 2R
R ui R
C -
+
uo
ui + u3 = 0 R 2R
自动控制原理C作业(第二章)答案
4 3
0.1
图 3-1 二阶控制系统的单位阶跃响应
解 在单位阶跃作用下响应的稳态值为 3,故此系统的增益不是 1,而是 3。系统模型为
(s)
s2
3
2 n
2n s
2 n
然后由响应的 p % 、 t p 及相应公式,即可换算出 、 n 。
p%
c(t p ) c() c()
4
3
3
33%
t p 0.1(s)
P1 G1G2
1 1
P2 G2G4
2 1
因此,传递函数为
C(s) P11 P2 2
R(s)
G2G1 G4G2 1 G1G2G3
3
自动控制原理 C 习题答案(第二章)
2.4 用梅森公式求系统传递函数。
R(S)
-
_
+ G1(s)
- _
G2(s)
+ C(S)
+
图 2-4 解: 单独回路 5 个,即
L1
1 R
1 C1S
1 R1C1S
11
1
L2
R2
C2S
R2C2 S
L3
1 C1S
1 R2
1 R2C1S
回路相互不接触的情况只有 L1 和 L2 两个回路。则
L12
L1L2
1 R1C1R2C2S 2
由上式可写出特征式为:
1
( L1
L2
L3 )
L1 L2
1
1 R1C1S
1 R2C2 S
1 R2C1S
1 R1C1R2C2S 2
益 K1 和速度反馈系数 Kt 。同时,确定在此 K1 和 Kt 数值下系统的延迟时间、上升时间和调节时间。
自控所有答案 教材:《现代控制系统》(第八版)谢红卫等译 高等教育出版社,2001.6
被测变量:功率
控制装置:微处理器
#
P1.7[解]
正反馈占优
时间误差
#
P1.11[解]
利用浮球保持水箱的液面高度,使得滴水孔的流水量均衡,从而使得液面高度与时间成线性关系,保持了水钟的准确度。
#
E2.4[解]
#
E2.5[解]
#
E2.8[解]
#
E2.26[解]
#
P2.7[解]
#
P2.8[解]
subplot(2,1,2),step([2,16],[1,6,16],t),
#
P5.4略
AP5.4略
E6.4[解]
令首列不变号的:
#
E6.6[解]
令s1列全为0得
由
#
P6.6[解]
略
#
AP6.3[解]
略
#
E7.1[解]
(a)>> rlocus([1,4,0] ,[1,2,2])
(b)
令
得:
(c)对应闭环极点(特征根)为
#
P9.2[解]
1)像点映射:
K=4;
num=[K];den =[1,1,4,0];
Gs=tf(num,den);nyquist(Gs);
2)围线与实轴负向的交点为:
令虚部为零得 ,
此时,频率特性函数的实部为:
所以,K的最大取值为 #
P9.4[解]略#
10.1、已知系统如下所示, ,
试设计控制器Gc(s),要求系统在单位阶跃输入下性能指标如下:
P180
E4.1、E4.4、P4.8
AP4.8
MP4.2
第五章反馈控制系统的性能
P235
第二章 控制系统的数学模型习题及答案
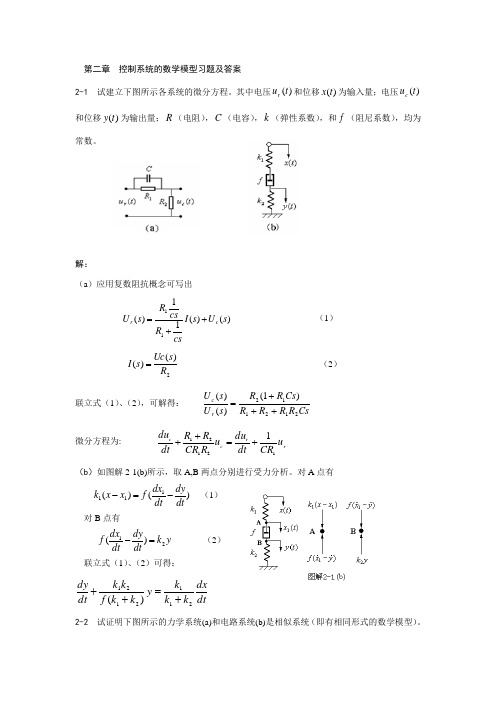
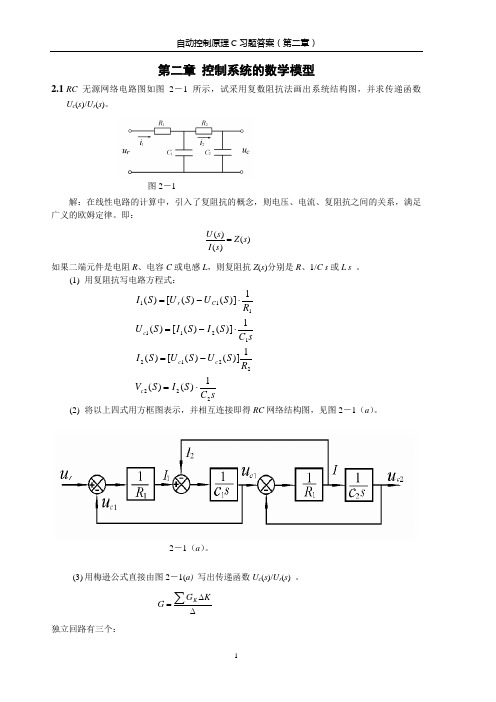
第二章 控制系统的数学模型习题及答案2-1 试建立下图所示各系统的微分方程。
其中电压)(t u r 和位移)(t x 为输入量;电压)(t u c 和位移)(t y 为输出量;R (电阻),C (电容),k (弹性系数),和f (阻尼系数),均为常数。
解:(a )应用复数阻抗概念可写出)()(11)(11s U s I csR cs R s U c r ++= (1) 2)()(R s Uc s I =(2) 联立式(1)、(2),可解得:CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为:r r c c u CR dt du u R CR R R dt du 121211+=++ (b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++ 2-2 试证明下图所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
解:(a) 取A 、B 两点分别进行受力分析,如图解所示。
对A 点有)()()(1122y y f y xf y x k -=-+- (1) 对B 点有1111)(y k y yf =- (2) 对式(1)、(2)分别取拉氏变换,消去中间变量1y ,整理后得)()(s X s Y = 21212121221212212121()1()1f f f fs s k k k k f f f f f s s k k k k k +++++++21221221221211221221k k s )k f k f k f (s f f k k s )k f k f (s f f +++++++= (b) 由图可写出sC R s U c 221)(+= sC R s C R sC R s U r 111112111)(+⋅++整理得)()(s U s U r c = 1)(1)(21221122121221122121+++++++s C R C R C R s C C R R s C R C R s C C R R 比较两系统的传递函数,如果设112211221,1,,,R k R k C f C f ====则两系统的传递函数相同,所以两系统是相似的。
机械控制工程课后习题解答
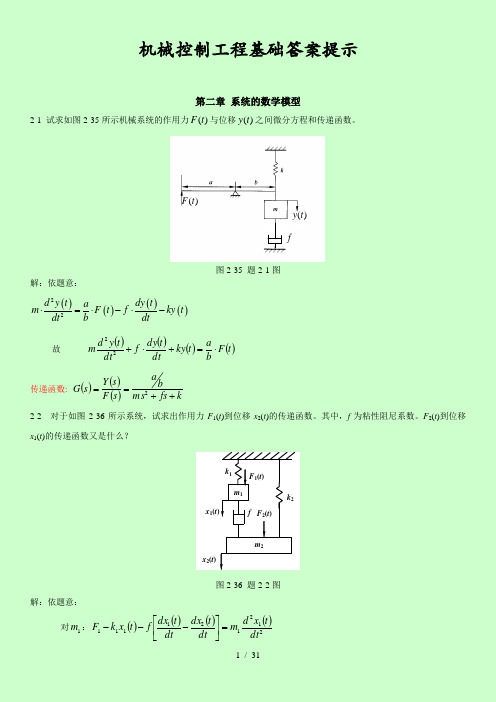
机械控制工程基础答案提示第二章 系统的数学模型2-1 试求如图2-35所示机械系统的作用力)(t F 与位移)(t y 之间微分方程和传递函数。
)(t F )(t y f图2-35 题2-1图解:依题意:()()()()22d y t dy t a m F t f ky t dt b dt ⋅=⋅-⋅-故 ()()()()t F b at ky dt t dy f dt t y d m ⋅=+⋅+22 传递函数: ()()()kfs m s b as F s Y s G ++==22-2 对于如图2-36所示系统,试求出作用力F 1(t )到位移x 2(t )的传递函数。
其中,f 为粘性阻尼系数。
F 2(t )到位移x 1(t )的传递函数又是什么?m 2m 1k 1 f k 2F 1(t )F 2(t ) x 2(t )x 1(t )图2-36 题2-2图解:依题意:对1m :()()()()212121111dt t x d m dt t dx dtt dx f t x k F =⎥⎦⎤⎢⎣⎡---对两边拉氏变换:()()()[]()s X s m s sX s sX f x k s F 12121111=---①对2m :()()()()()222222212dt t x d m t x k dt t dx dt t dx f t F =-⎥⎦⎤⎢⎣⎡-+ 对两边拉氏变换:()()()[]()()s X s m s x k s sx s sx f s F 22222212=--+②故: ()()()()()()()()⎩⎨⎧=+++-=-++S F s x k fs s m s fsx s F s fsx s x k fs s m 222221121121 故得:()()()()()()()()()()()()()()⎪⎪⎩⎪⎪⎨⎧-+++++++=-+++++++⋅=22221212212122222121222211fs k fs s m k fs s m k fs s m s F s fsF s x fs k fs s m k fs s m s fsF k fs s m s F s x 故求()t F 1到()t x 2的传递函数令:()02=s F()()()()()()()()()2122211122432121212211212x s fsG s F s m s fs k m s fs k fs fsm m s f m m s m k m k s f k k s k k ==++++-=+++++++求()t F 2到()t x 1的传递函数 令:()01=s F()()()()()()()()()1122221122432121212211212x s fsG s F s m s fs k m s fs k fs fsm m s f m m s m k m k s f k k s k k ==++++-=+++++++2-3 试求图2-37所示无源网络传递函数。
第2章 控制系统的数学模型 参考答案
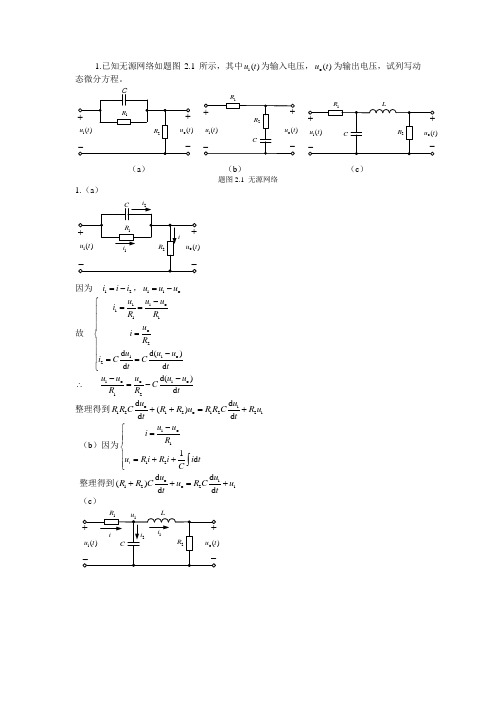
1.已知无源网络如题图2.1所示,其中i ()u t 为输入电压,o ()u t 为输出电压,试列写动态微分方程。
(a ) (b ) (c )题图2.1 无源网络1.(a )因为 12i i i =-,1i o u u u =-故 i o 1111o2i o 12d()d d d u u u i R R u i R u u ui C Ct t -⎧==⎪⎪⎪=⎨⎪⎪-==⎪⎩i o o i o 12d()d u u u u u CR R t--∴=- 整理得到o i 1212o 122i d d ()d d u uR R C R R u R R C R u t t++=+(b )因为i o 1121d i uu i R u R i R i i t C -⎧=⎪⎪⎨⎪=++⎪⎩⎰整理得到o i 12o 2i d d ()d d u uR R C u R C u t t++=+(c )因为i 1121o 1122o 1o 2()d d d d u u i i i i R u u i i C R t u L u u R t ⎧-=+=⎪⎪⎪⎪==⎨⎪⎪-=⎪⎪⎩得到oi 1112o 1o2()d d d d u u u u C R R t u L u u R t -⎧=+⎪⎪⎨⎪=+⎪⎩2o o oo o i 2111222d d d d d d u u u u u u L CL C R R R R t R t R t --=++ 整理得到2o o 11212o 2i 2d d ()()d d u uR LC R R C L R R u R u t t++++=2.试求题图2.2中各无源网络的传递函数。
)(a ) (b ))C(c ) (d )题图2.2 习题2的无源网络2. (a )因为111111R Z R Cs R Cs ==+ 所以o 2122i 121212()()()U s R R R Cs R G s U s Z R R R Cs R R +===+++ (b )因为11111111R Z R C s R C s ==+,22222211R C s Z R C s C s +=+= 所以o 211222i 121212112212()(1)(1)()()()1U s Z R C s R C s G s U s Z Z R R C C s R C R C R C s ++===+++++ (c )因为()()()22122221111R Ls R Ls Cs Z R Ls Cs LCs R Cs R Ls Cs++=+==++++ 所以o 122i 1111212()()()()U s Z Ls R G s U s R Z R LCs R R C L s R R +===+++++ (d )因为1212112111211()1R R C s R Z R R C s R C s R C s +=+=++,32232211R C s Z R C s C s+=+=所以2o 3121211213222i 121223131211212232()()()1()()()()1U s R R R C C s R C R C R C s Z G s U s Z Z R R R R R R C C s R C R C R C R C s +++++===++++++++ 3. 试求题图2.3中各有源网络的传递函数。
自动控制原理第2章练习题
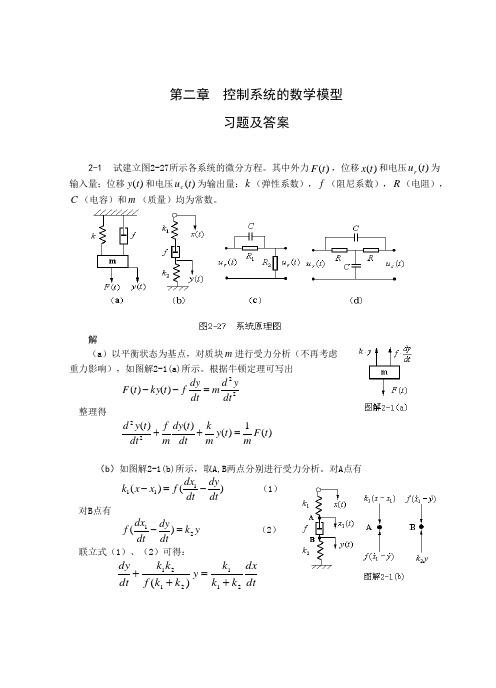
第二章 控制系统的数学模型习题及答案2-1 试建立图2-27所示各系统的微分方程。
其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dty d m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dt t y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++(c) 应用复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (3) 2)()(R s Uc s I = (4) 联立式(3)、(4),可解得: CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++(d) 由图解2-1(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5) )()(1)(s RI s RI Css I c R c -= (6) []Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明图2-28中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2章 自动控制系统的数学模型2.1 学习要点1 控制系统数学模型的概念、描述形式与相互转换;2 物理系统数学模型的编写方法和步骤;3 非线性系统线性化的意义、适用性和具体方法;4 系统方框图等效变换原则与应用;5 信号流图等效变换与梅逊增益公式应。
2.2 思考与习题祥解题2.1思考与总结下述问题。
(1)我们学习的动态物理系统的数学模型有哪些形式? (2)非线性系统线性化的意义、适用性和具体方法。
(3)传递函数的意义、作用和性质;与微分方程模型相比,这种模型有何优点?答:(1)自动控制系统的数学模型指的是描述系统运动特性的数学描述。
我们学习的动态物理系统的数学模型有微分方程、传递函数和频率特性等表达式描述形式,还有方框图和信号流图等图形化描述形式。
(2)实际系统中变量之间的关系都或多或少地具有某种非线性特性。
由于求解非线性微分方程比较困难,因此提出了线性化问题。
如果控制系统的工作状态是在工作点的一个小偏差范围内变化,就可以用一条过工作点的切线代替工作曲线在这个小偏差范围内的变化关系,这样,就把非线性特性线性化了。
应用线性化的数学模型就可以简化系统分析和设计的过程,虽然这是一种近似的处理方法,但却很有实际意义。
只要这样做所造成的误差在允许范围内,不会对控制系统的分析和设计造成本质影响,就可以进行非线性系统线性化。
具体方法是:对任意函数,在某一点(工作点)处对函数进行泰勒级数展开,忽略二阶以上高次项,就可以得到线性化的函数关系。
(3)系统输入和输出在零初始条件下拉氏变换的比)(s G 称为系统的传递函数。
传递函数表示了系统输入输出之间的关系,是控制系统的一种数学模型,可以直接从微分方程导出。
传递函数只与系统结构与参数有关,与外部输入无关,传递函数反映了系统的结构特征和参数特性。
由于传递函数是以复数s 为变量,避免了许多求解微分方程的麻烦。
因此,经典控制论中更常用传递函数这种数学模型形式对控制系统进行分析和设计。
题2.2 试建立题2.2图所示各系统的微分方程。
其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。
)(t)t )t(t))(a )(b )(c )(d题2.2图解:(a )以平衡状态为基点,对质块m 进行受力分析(不考虑重力影响),根据牛顿定理可写出22)()(dty d m dt dy f t ky t F =-- 整理得)(1)()()(22t F m t y m k dt t dy m f dtt y d =++(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有)()(111dtdydt dx f x x k -=- (1)对B 点有y k dtdydt dx f 21)(=- (2)联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++ (c) 应用复数阻抗概念可写出)()(11)(11s U s I cs R cs R s U c r ++= (3) 2)()(R s Uc s I = (4)联立式(3)、(4),可解得: CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为:r r c c u CR dt du u R CR R R dt du 121211+=++ (d) 由图解2.2(d )可写出[]Css I s I s I R s U c R R r 1)()()()(++= (5))()(1)(s RI s RI Css I c R c -= (6)[]Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得: 1312)()(222222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++题2.3 试证明题2.3图中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
2k )))(t )(a )(b题2.3图解(a) 取A 、B 两点分别进行受力分析,如图解 (a)所示。
对A 点有)()()(1122y y f y xf y x k -=-+- (1) 对B 点有1111)(y k y yf =- (2) 对式(1)、(2)分别取拉氏变换,消去中间变量1y ,整理后得)()(s X s Y = 21212121221212212121()1()1f f f fs s k k k k f f f f f s s k k k k k +++++++(b) 由图可写出sC R s U c 221)(+=sC R s C R sC R s U r 111112111)(+⋅++整理得)()(s U s U r c = 1)(1)(21221122121221122121+++++++s C R C R C R s C C R R s C R C R s C C R R 比较两系统的传递函数,如果设112211221,1,,,R k R k C f C f ====则两系统的传递函数相同,所以两系统是相似的。
题2.4 假设某容器的液位高度h 与液体流入量r Q 满足方程r Q Sh S dt dh 1=+α,式中S 为液位容器的横截面积,α为常数。
若h 与r Q 在其工作点),(00h Q r 附近做微量变化,试导出h ∆关于r Q ∆的线性化方程。
解 将h 在0h 处展开为泰勒级数并取一次近似h h h h dt h d h h h ∆⋅+=∆⋅+=00021|0 (1) 代入原方程可得)(1)21()(0000r r Q Q S h h h S dt h h d ∆+=∆⋅++∆+α (2) 在平衡工作点处系统满足000r Q h dtdh =+α (3) 式(2),(3)相减可得h ∆的线性化方程r Q h h dt h d S ∆=∆+∆02α题2.5 试求题2.5图所示各信号)(t x 的象函数)(s X 。
a c1232T T题2.5图解:(a ))(2)(0t t t x -+=∴)(s X = s t e ss 0212-+(b ))())(())(()(321t t c t t c b t t a b a t x -------+=∴ )(s X = ])()([1321s t s t s t ce e c b e a b a s -------+(c ))(t x = )(4)2(4)2(442222T t T T t T T t Tt T -+----∴ )21(4)(222Ts s Te esT s X --+-= 题2.6 求下列各拉氏变换式的原函数。
(1) 1)(-=-s e s X s(2) )3()2(1)(3++=s s s s X (3) )22(1)(2+++=s s s s s X 解 :(1) 1)(-=t e t x (2) 原式 =)3(31241)2(83)2(41)2(2123++++-+++-s s s s s∴x (t )= 24131834432222++-+-----t t t t e e e t e t (3) 原式 =1)1(1211)1(12121222121222++⋅++++⋅-=++-s s s s s s ss ∴)(t x = )cos (sin 2121t t e t -+-题2.7 已知系统传递函数232)()(2++=s s s R s C ,且初始条件为1)0(-=c ,0)0(=c,试求系统在输入)(1)(t t r =作用下的输出)(t c 。
解: 单位阶跃输入时,有ss R 1)(=,依题意s s s s s s s s C 1)2)(1(2311221)(⋅+++=+++-= ∴ )2)(1(23)()()(+++==s s s s R s C s G []t t e e s s L s G L t k -----=⎥⎦⎤⎢⎣⎡+++-==21142411)()( 题2.8 求题2.8图所示各有源网络的传递函数)()(s U s U r c 。
))(a )(b )(c 题2.8图解:(a) 根据运算放大器 “虚地”概念,可写出12)()(R Rs U s U r c -=(b) 22112211111122)1)(1(111)()(s C C R s C R s C R s C R s C R s C R s U s U r c ++-=+⋅+-=(c) )1(11)()(212122Cs R R R R Cs R Cs R s U s U r c +-=+⋅-= 题2.9 某位置随动系统原理框图如题2.9图所示,已知电位器最大工作角度m Q =3300,功率放大器放大系数为3k 。
(1)分别求出电位器的传递函数0k ,第一级和第二级放大器的放大系数1k ,2k ;(2) 画出系统的结构图;(3)求系统的闭环传递函数)()(s Q s Q r c 。
+题2.9图解:(1) 电位器的传递函数ππ1118018033030000=⨯==m Q E K根据运算放大器的特性,可分别写出两级放大器的放大系数为310101030331-=⨯⨯-=K , 210101020332-=⨯⨯-=K (2) 可画出系统结构如图2.1所示:图2.1 题2.9系统结构图(3) )1(11)1()()(3210323210+++++=s T s K K K K K s T K K K K s T s K K K K K s Q s Q m mm t m m mr c11132103223210+++=s K K K K K K K K K s K K K K K T mtm m m题2.10 已知系统方程组如下:⎪⎪⎩⎪⎪⎨⎧=-=-=--=)()()()()]()()([)()]()()()[()()()]()()[()()()(3435233612287111s X s G s C s G s G s C s X s X s X s G s X s G s X s C s G s G s G s R s G s X 试绘制系统结构图,并求闭环传递函数)()(s R s C 。