人形机器人(课堂PPT)
13.智能循迹搬运机器人——【可编程人形积木机器人新课件PPT】

2.看一看
搬运机器人AGV
智能搬运机器人AGV,这个貌 似扫地机器人的自动导引小 车载货达300公斤以上,可 实现货物在库房内的搬运, 通过调度系统与人工智能可 灵活改变路径,实现自动避 障与自主规划路径。
2.看一看
京东无人配送车
城市终端配送小能手 ,全自动作业,安全又灵 活,比大部分人都认路!
2.看一看
货架穿梭车
SHUTTLE货架穿梭车, 负责在立体货架上移动货物 ,能够实现6m/s的高速行走 ,并且具有每小时1600箱的 巨大吞吐量。
2.看一看
分拣机器人
DELTA型分拣机器人, 这个拣选机器人的动作令人 眼花缭乱,它采用3D视觉系 统,能够实现动态拣选、自 动更换捡拾器以及155ppm 的作业节拍,具有三轴并联 机械结构及适应货物转角偏 差辅助轴的特点。
在核电厂的核储存地点使用AGV小车,以避免辐射的危 险。
6.做一做
任务1:智能循迹搬运机器人
让机器人通过光线传感器感应到光线很强时,双手抱球,沿着 黑色线到达目的地,使用红外遥控器按下确定键自动卸下球。
1
2
6.做一做
3
7.分享一下
大家好!我叫李小明。 今天我学习了智能循迹搬运机器人 1.介绍京东的六种机器人 2.什么是搬运机器人 3.搬运机器人的运用 4.任务:完成智能循迹搬运机器人
请各位同学: 1)整理教具箱,器材部件放入指定位置, 2)整理桌椅 3) 别忘了说:谢谢!再见!
在未来的无人仓中,包括今天发布的六种机器人:搬运机器 人、货架穿梭车、分拣机器人、堆垛机器人、六轴机器人、无 人叉车在内的一系列物流机器人将会辛勤地工作,组成完整的 中件商品与小件商品智慧物流场景。据称,京东目前“无人 仓”的存储效率是传统横梁货架存储效率的10倍以上,并联机 器人拣选速度可达3600次/小时,相当于传统人工的5-6倍。
人形机器人精品课件:第6课 随心所欲做动作

随心所欲做动作~!!
场景?? 动作??
今天要做的事情
了解项目和场景、动作的定义,学习编辑动作 的功能。
让我们了解一下?
◎ 场景和动作 ◎
RoboHumanoid利用场景(Scene)和动作(Motion)表达机器人的多种动作。 场景是机器人的每一个动作的单位,场景聚在一起显示动作的就是动作。
让我们了解一下?
◎ 动作编辑器 ◎
可以编辑在“制作动作”里添加的动作。组合多个动作表达多种动作,程序可以保存在机器人里使用。
① 程序芯片:由Loop和End芯片组成,按照指定的次数循环。 ② 用户芯片:通过制作动作制定到的场景以芯片形态表示。 ③ Start 芯片:表示程序开始的芯片。 ④ KeyIndex:为保存程序的空间。 ⑤ 下载:把程序下载到机器人。 ⑥ 动作:下载后启动机器人时使用的图标。 ⑦ 端口连接部:搜索并连接与机器人连接的端口。 ※ 制作动作和动作编辑器会连动端口连接,因此不需要另外进行端口连接。 ⑧ 时间轴:按照连接的顺序表示场景设定的时间。
让我们了解一下?
◎ 在动作编辑器编程 ◎
▶ 反复动作
在动作编辑器的编程是按序连接图标形式的芯片的方式,有“程序芯片”和“用户芯片”,添加动作
的芯片属于
“用户芯片”。
芯片的移动是Drag & Drop方式,连接到Start芯片下面,依次实行。
芯片和芯片连接时,芯片之间会表示
,可以确认是否正常连接。
使用程序芯片的“Loop”和“End”芯片,可以输入想要的次数执行反复动作。 使用Loop芯片时,要在想要反复动作的用户芯片的后面连接End芯片。 反复2次“robot 01”的动作时要在Loop芯片上点击鼠标右键,出现设定窗后在 反复次数输入2。
人形机器人精品课件:第10课 遥控器控制机器人

<步幅宽时>
左右
右 左
<步幅窄时>
◎ 保存程序 ◎
请把前进、后退、左转、右转程序依次保存在KeyIndex。
启动一下吧?
◎ 设定遥控器 ◎
请把保存在KeyIndex的程序设定在各个遥控器按键里。
<前进> <向旁边走左侧>
那么RF通信是什么呢?RF的词典上的意思是Radio Frequency(无线频率)的简称。也就是说,可以 用无线传达信息或控制某种装置。那么实际生活中使用RF通信的都有哪些呢?
RF通信在我们周围也比较常见。用无线启动汽车的遥控器、广播、交通卡等都 是利用RF通信的产品。那么这些产品是怎么接收信号的呢?就是利用了天线。 跟红外线遥控器一样,存在发射器和接收器。
<后退> <向旁边走右侧>
<1号前进>
<2号后退>
<3号向旁边走(左侧)>
<左转> 前进和后退要设定Start KeyIndex、End KeyIndex。
<右转>
<4号向旁边走(右侧)>
<L号左转>
让我们了解一下?
◎ 从遥控器下载设定 ◎
▶ 1. 程序和按键设定 点击想要设定的按键。选择的按键会变色。选择好按键的话,从Main KeyIndex目录选择想要指定的
动作。
▶ 3. 下载 完成了程序保存时,开始在上端下载下载图标。显示下载的进行,完成时发出声音的同时显示“下载
完成”。
▶ 2. 动作运行及保存 保存程序之前按下动作图标,以确认是什么程序。已设定了想要的程序和按键时,应把程序保存在
人形机器人机器人第四节课
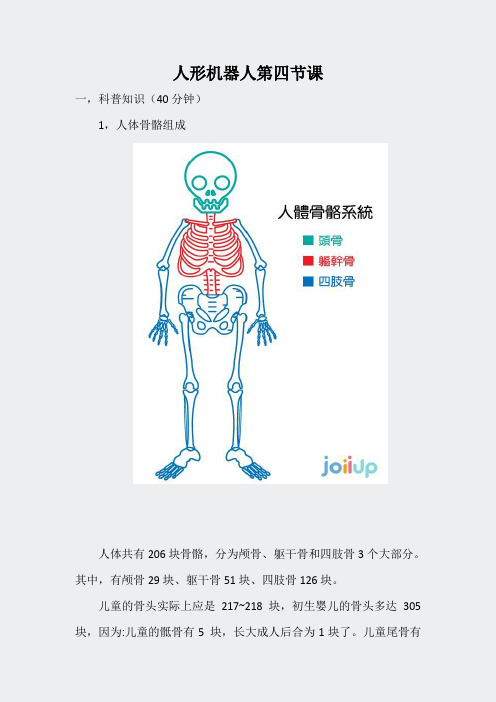
人形机器人第四节课一,科普知识(40分钟)1,人体骨骼组成人体共有206块骨骼,分为颅骨、躯干骨和四肢骨3个大部分。
其中,有颅骨29块、躯干骨51块、四肢骨126块。
儿童的骨头实际上应是217~218块,初生婴儿的骨头多达305块,因为:儿童的骶骨有5 块,长大成人后合为1块了。
儿童尾骨有4~5块,长大时也合成了1块。
儿童有2块髂骨、2块坐骨和2 块耻骨,到成人就合并成为2块髋骨了。
这样加起来,儿童的骨头要比大人多11~12块。
2,人体各部位名称3,人体运动学原理(本课只讲解第一部分内容,即人体机械运动的特点,余下内容以后课次会逐一讲解一部分)人体机械运动的特点:人体机械运动受人的意识支配,是思维这一高级运动的外部表现和直接目的,因此具有高级运动的本质;人体机械运动将受到中枢神经系统等生物学因素的控制、调节和制约。
由于人体结构是多环节的链式机构,因此人体机械运动将表现出多样性和复杂性,为了达到预定目标所进行的运动方式并不是唯一的。
同时,人体在运动过程中,既受到自身生物学因素的制约,又受到力学因素和运动规律等的制约。
因此,在体育运动中,存在着合理的和最佳的人体机械运动形式,即合理的动作技术原理和最佳运动技术。
1、运动的相对性:自然界中所有的物体都是不断运动和变化的,运动是绝对的。
对于同一物体的运动,参考系的选取不同,对它运动的描述也不同,即在不同的参考系中,对同一物体的运动具有不同的描述,这一事实称为运动的相对性。
2、人体的运动形式:人体是非常复杂的,人体的运动也是复杂的。
如果将人体进行不同的简化(即质点或刚体),那么人体的运动形式将不同。
将人体简化为质点,人体的运动形式有直线运动(包括匀速直线运动和变速直线运动),曲线运动(包括斜抛运动和圆周运动);将人体简化为刚体,人体的运动形式有平动、转动和复合运动(平面运动)三种。
3、人体运动学特征量(参数):就是人体或人体标志点的运动时间、空间位置,速度、加速度,人体各环节的转动角度,角速度,角加速度等物理量。
人形机器人精品课件:第1-4课 组装

螺丝
马达
PART 2. 左臂
3 组装肩膀
肩膀 螺丝
螺丝
导轨螺丝 x 1 马达
PART 2. 左臂
前面
后面
4 组装马达 (ID 06)
马达导轨
马达 马达导轨
PART 2. 左臂
螺丝
5 组装手
马达
PART 2. 左臂
手 螺丝
6 组装左臂
螺丝
螺丝 导轨螺丝 x 1
PART 2. 左臂
前面
电线
后面
PART 3. 右臂
1 组装腿
先连接电线,再连接腿的部分。
螺丝
导轨螺丝 x 2
螺丝
PART 7. 完成汇编
把电线整理得不被机器人所夹带
前面
后面
前面
后面
2 组装两个臂
先连接电线后组臂
2x4 螺丝 x 8
PART 7. 完成汇编
3 组装CPU
先连接电线后组装CPU
PART 7. 完成汇编
电线x1
机器 人
4 组装RF 模块
请注意马达的零点标记槽 和导轮的标记槽的位置, 然后再组装。
请注意
3 在组装机器人之前请注意马达的零点,然后再开始组装。如果马达的零点没有调准,请用
螺丝刀将零点校准。 顺时针方向转动
请注意
4 马达导轨组装时请确认螺丝的方向再组装 。
组装上螺丝的口 未组装上螺丝的口
请注意
5 在导杆上组装构架的时候一定要在马达零点对准的状态下组装。
:// roborobo.co.kr
1 组装马达导轨及关节
马达导轨
关节
PART 3.右臂
2x4 螺丝 x 4
2 组装马达 (ID 02)
人工智能机器人PPT课件

04
结语
人工智能具有了“看”与“听”的能力后,它就可以用在 机器人领域。
机器人是人工智能落地的主要应用方面,其中,家庭机器 人与工业机器人都需要人工智能给它们注入灵魂。《互联 网周刊》通过对人工智能机器人企业的这一期报道,梳理 出中国最有影响力的人工智能机器人企业,这批机器人企 业将为“中国制造2025”提供强有力的支撑。
目前在市场上还出现了很多擅长电话销售的人工智能机器人,这些机器人主要用 的是科大讯飞的接口与技术。人工电话销售话务员,平均每天只能打100倒300通 电话,而且人工在面对被客户责难时候,有时候容易情绪不稳定、工作效率降低。 但是,人工智能机器人的电话销售却能做到全年无休,每天拨打800-1200通电话, 而且情绪稳定、永远有100%热情。所以人工智能机器人可以极大地提高了工作效 率,还能降低人工成本,可以为企业起到降本增效的作用。
最近,优必选还宣布推出了人工智能机器人悟空,悟空机器人是由优必选和腾讯 叮当合作推出的一款有生命感的机器人。它采用了全新设计的带离合装置的伺服 舵机,眼部LED显示屏可呈现哭泣、开心、爱心等多种表情,而且其在交互能力上 添加了很多拟人化的互动方式,比如在不理它的时候,它会打喷嚏、也会打哈欠, 看起来十分呆萌可爱。悟空机器人支持语音互动、人脸识别、物体识别、智能拍 照与斗舞等功能,具备极强的人机交互能力。
随着人工智能时代的来临,科沃斯机器人也积极拥抱人工智能,进行 了技术的转型升级。
在2018年5月,科沃斯机器人与京东集团、旷视科技一道成为新成立的 南京大学人工智能学院的合作单位,并被授予首批南京大学人工智能 学院的学生实训基地。南京大学人工智能学院在周志华院长的带领下, 正在茁壮成长,科沃斯机器人也希望借助南京大学的智力资源实现在 人工智能人才领域的快速布局。
十自由度体操机器人.ppt

位定时器/ 计数器 具有独立振荡器的实时计数器RTC 四通道PWM 8路10 位ADC
硬件:串口线(用于动作调试)、下载器(用于下载 程序)
软件:机器人动作调试软件、编译软件ICCAVR、编 程软件Progisp
程序:程序模版
控制板的焊接
正确的烙铁手持方式
像握钢笔那样,与焊接面约为45°
挺胸端正直坐,不要弯腰,鼻尖至烙铁头尖端 至少应保持20cm以上的距离,通常以 40cm时为宜。
完成后的控制板
动力模块舵机
介绍:伺服马达,主要由外壳、电路板、 无核心马达、齿轮与位置传感器组成, 是一种位置伺服的驱动器,适用于角度 需要不断变化并可以保持的控制系统检 测器所构成
取板划线加工打磨折弯钻孔
制作好的结构件
确保加工的精度,特别是打孔的精度,避 免出现机器人左右不对称的情况
装配过程也最能反映出机器人设计上的不 足与缺陷,装配应对出现的问题及时进行 解决,为以后的调试过程做好准备
装配时注意舵机初始位置的调整,尽量让 舵机位于中间位置
装配好的体操机器人
控制模块硬件
场地
规则
相关图片视频
MVI_4233.MOV
硬件结构件的设计
结构件卡口的加工制做
控制板的焊接
硬件结构件的装配
控制系统的安装
硬件设计
通过CAD/PROE等辅助设计软件进行硬件 设计,绘制出整体效果图及部件加工图
Cad一般用于二维图纸的制作,也可用于三 维建模,一般可满足设计需求
Proe是比较高级的建模软件,学有余力可 以进一步学习
十自由度体操机器人
课程框架
人形机器人第三节课——【人型机器人 精品课件】

人形机器人第三节课一,科普知识(30分钟)马达的发展历史直流电机的产生与形成1820年丹麦物理学家奥斯特(Hans Christian Oersted, 1777-1851)发现了电流磁效应:将导线的一端和伽伐尼电池正极连接,导线沿南北方向平行地放在小磁针上方,当导线另一端连接到负极时,磁针立即指向东西方向。
把玻璃板、木片、石块等非磁性物体插在导线和磁极之间,甚至把小磁针浸在盛水的铜盒子里,磁针照样偏转随后安培通过总结电流在磁场中所受机械力的情况建立了安培定律。
1821年9月法拉第发现通电的导线能绕永久磁铁旋转以及磁体绕载流导体的运动,第一次实现了电磁运动向机械运动的转换,从而建立了电动机的实验室模型,被认为是世界上第一台电机,其原理如图1所示,在一个盘子内注入水银,盘子中央固定一个永磁体,盘子上方悬挂一根导线,导线的一端可在水银中移动,另一端跟电池的一端连接在一起,电池的另一端跟盘子连在一起,构称导电回路,载流导线在磁场中受力运动。
1822年,法国的阿拉戈盖吕萨克发明电磁铁,即用电流通过绕1线的方法使其中铁块磁化。
1825年,斯特企(W.sturgeon)用16圈导线制成了第一块电磁铁。
1829年,美因电学家亨利对斯特金电磁铁装置进行了一些革新,绝缘导线代替裸铜导线,因此不必担心被铜导线过分靠近而短路。
由于导线有了绝缘层,就可以将它们一圈圈地紧紧地绕在一起,由于线圈越密集,产生的磁场就越强,这样就大大提高了把电能转化为磁能的能力。
到了1831年,亨利试制出了一块更新的电磁铁,虽然它的体积并不大,但它能吸起1吨重的铁块。
1826年德因G.S欧姐提出电路实验定律一一欧姐定律。
1831年,法拉第发现了电磁感应现象之后不久,他又利用电磁感应发明了世界上第一台真正意义上的电机-法拉第圆盘发电机。
亨利的电动机的重要意义在于这是第一次展示了由磁极排斥和吸引产生的连续运动,是电磁铁在电动机中的真正应用1832年,斯特金发明了换向器,据此对亨利的振荡电动机进行了改进,并制作了世界上第一台能产生连续运动的旋转电动机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
发展历程
• 类人型机器人的研究,最早可追溯至 西元1893年,Georges Moore创作了 第一个利用蒸气驱动类人型步行机器 [Rosheim, 1994],然详细构造与运 动原理我们并无法得知。其后在第一 次大战期间,Thring发明了具有腿之 农耕机[Thring, 1983]。至1970年之 间,许多研究人员进行辅助人类行走 的步行机器之研究,如Bernstein于 1948年于莫斯科义肢设计研究中心, 发展具电子装置的腿外骨骼 (Exosceleton)[Karsten, 2003]。
11
• 图1.3 日本产业技术综合研究所(AIST)HRP系列[3] 在西元2000年,SONY公司也发表了高50公分,重5公斤的小型机器人, SDR-3X[Kuroki, Ishida, and Yamaguchi, 2001](图1-3),每一只脚具有 六个自由度,不但会跳舞,还可单腿站立;而在2002年,SONY更发表了 最新一代的SDR-4X[Fujita, Kuroki, Ishida, and Doi, 2003](图1-4),它 的高度58公分、重6.5公斤,每一只脚同样具有六个自由度,除了具有前 一代SDR-3X的功能外,还可以在10mm的凹凸地面行走,上10度的斜坡, 甚至被推倒了还能自己站起来,可说是向家用机器人的目标,又迈进了一 大步。
第三章节:人形机Biblioteka 人— 陈黄祥(研究方向:机器人研究、创新能力研究)
1
作业回顾与点评
自主作业: 美赞臣售货机器人设计方案 讨论内容: 1、造型 2、功能
2
怎么样的机器人是人 形机器人?
3
类人型机器人之发展现况
• 类人型机器人是一门由仿生 学、机构设计、控制理论和 人工智慧等多项科技形成的 跨领域科技,与轮型和多足 机器人相比,类人型机器人 拥有较大的优势去适应更复 杂的地形,并且有更加灵活 的运动能力和速度变化能力。
8
• 再者,由1986年开始,日本的Honda公司[Honda, 2003],也作了一 系列有关类人型机器的研究,从第一代的E0、E1、E2、E3、E4、 E5、E6、P1 、P2、P3,到2003 年来台湾展览的ASIMO(图1-2), 不但将机器人的高度缩小至120公分,重量也减轻至52公斤;与高 160公分、重130公斤的P3相比,不但增加了安全性,也较有亲和力。 ASIMO为本田公司投入巨资经过10多年的开发,研制出了在世界上 居领先地位的类人型机器人成果。 ASIMO的全名为Advanced Step in Innovative MObility,采用具有及时预测动作控制系统的i-Walk技术, 让ASIMO在行走时能更加顺畅,同时在电脑工作站中启动行进步伐的 预先设定,并使用携带式的控制器来进行弹性的步伐及手部的动作操 作。此外,ASIMO透过它的身体的重力感应器和脚底的触觉感测器把 地面的状况送回电脑,电脑则根据路面情况作出判断,进而平衡身体, 稳定地前后左右行走。它不仅能于平坦路面行走,还可以上/下楼梯和 行走于倾斜的路面,由于脚底安装有压力感测器,脚底不平也能保持 身体的直立姿态,与1997年同公司所研发的P3相比,它具有体型小、 质量轻、动作紧凑轻柔的特点。 ASIMO身高120cm,体重43公斤, 适合于家庭操作和自然行走。
9
• 图1.2 日本本田公司ASIMO之演进[2]
10
• 类人型机器人HRP(Humanoid Robotics Program)系列 是AIST与川田工业(Kawada)、川崎重工业(Kawasaki) 共同合作的研究成果,经费是由新能源暨产业技术总合开 发机构(NEDO)基础技术研究事业之「在实际环境中作 业的人型机器人基础技术研究开发」计画所支助。 HRP-2类人型机器人平台(图1.3)于2002年3月公开,其 直立高度约有5英呎2英寸,重量接近128磅,有30个自由 度。 HRP-2是一台人机互动之人形机器人,它可以和一 个人合抬一块大木板,透过感应另一端由人施加的力和方 向来掌握平衡;假如跌倒亦能毫发无伤地再站起来,具有 完成日常任务之基本能力。 2009年日本产业技术综合研究所(AIST)展示一款会说 话,可行走而又具有丰富表情的新型“女性”机器人HRP-4C,其全身共有30个马达来控制肢体移动也可以做 出喜、怒、哀、乐和惊讶的表情。
12
图1.4 SONY机器人[4]
6
图1.1 早稻田大学的人型机器人研究室[1]
7
图解
• 此外,Vukobratovic于1975年,在南斯拉夫的贝尔格勒, 发展辅助行走步行机器[Song and Waldron, 1989](图14)。日本可说是世界上最热衷于类人型机器、且一直持 续不断研究的国家。从1966年至今,早稻田大学的人型机 器人研究室[Koganezawa, Takanishi, and Sugano, 1991], 从早期有着最基本之双足移动功能的WL-1(图1-1a)开 始;到了WL -3(图1-1b),已经可以站立和坐下;WAP3(图1-5c),可上下楼梯和斜坡,更可以转弯,而且是 世界上第一个三维二足步行机器;WABOT I (图1-1d), 可量测距离和方向,是世界上第一个照人类尺寸设计的机 器人;WL-9DR(图1-1e),将脚底接触地板的点,由三 个增加到四个,所以可利用数值解得到较特殊的步行方式; 而近年来WL-12(图1-1h),不但增加了上半身,且具两 个自由度的腰部,可以走得更像人类。
4
一国内发展情况
• 过去国内有关机器人的研究大都集中于自动导航 车、履带式服务机器人、智慧型轮椅、先进家用 服务机器人、机械手臂、居家看护机器人、个人 型助理机器人系统、小中型足球机器人等系统之 主要核心与系统整合技术之研发与软硬体装备建 置,较少有双足平台之类人型机器人相关研究, 国内所开发之类人型机器人都以RC伺服机(马达) 为其驱动单元,但是此类型之机器人一般仅于娱 乐之用,无法承受太大之负载,成为人们服务之 助力,所以发展大型类人型机器人有其必要。