多无人机航路重规划方法
基于改进蚁群算法的多无人机航路规划研究

中图分类号: 2 14 V 7 . 文献标识码: B
Co pe a ie Ro t a n ng f r UCAVsUsn r no s d o r tv u e Pl n i o i g Vo o iBa e
M u t —Be a i r An l n g rt m li — h v o tCoo y Alo i h
s f o ni i rm,aV rni ae l —B hvo A t o n lo t ( B A A)i d vlpd h i o V r o Da a s o g ooo B sdMut e ai n C l yAgrh V MB C i r o i m s ee e .T e o
在 N P完 全 问 题 上 表 现 出 较 好 的 寻 优 能 力。本 文 在 用
V rn i o o 图法对威胁 环境建 模 的基 础上 , 出 了基 于 V rni o 提 ooo
图的多行为蚁群算法 ( o ni ae ut— eair n C 1 V r o B sdM l B h v t o o i oA . n l i m, B A A) 该 ayAgrh V MB C , 算 法解 决 了从 任 意起 止 点 的 ot
meh d e f r e h o p r t n a n h t ,a d e iin l e ov st e c nr d ci n b t e ie st n o — t o n o c st e c o ea i mo gt e a s n f c e t r sl e h o t it ewe n d v r i a d c n o n y a o y v r e c f h ou in .A d t n l d r cin r sr t n meh d i a d d t MB A r v h l o t m’ e g n e o es l t s d i o a y, i t e t c i t o d e VB t o i l e o i o s o AC t i o et e ag r h o mp i S ef in y h s ag r h i a p id t C f ce c .T i l o t m s p l o U AVs o t l n ig a d e a ls t e t n o p r t e r u e c i i e ’r u e p a n n n n b e h m o f d c e ai o t smu h i v
无人机航测中的航路规划与数据采集方法
无人机航测中的航路规划与数据采集方法无人机在航测领域扮演着越来越重要的角色,它极大地提高了测绘和地理信息科学领域的工作效率和数据精度。
而在无人机航测过程中,航路规划和数据采集方法的选择和优化对于保证航测任务的顺利完成和获取高质量数据具有至关重要的意义。
一、航路规划方法航路规划是无人机航测的首要步骤之一,它决定了飞行器在何处采集哪些数据,可以说是航测任务的“蓝图”。
航路规划的目标是最大程度地覆盖需要测量的区域,并且在保证航行安全的前提下,以最短的时间和最少的资源完成任务。
在进行航路规划时,可以采用以下方法:1. 栅格法:将测量区域划分为多个小格子,并根据每个区域的特点确定无人机行进路径。
这种方法能够灵活地适应不同区域的特点,但是对计算机处理能力要求较高。
2. 路径规划算法:可以采用最短路径算法,如迪杰斯特拉算法和A*算法等,通过计算不同区域之间的距离和障碍物的分布情况,确定最佳的航行路径。
3. 遗传算法:模仿生物进化的过程,通过不断的优化和选择,生成最优的航行路径。
这种方法可以解决复杂、多变的航行环境,但是计算时间较长。
二、数据采集方法航路规划决定了无人机的飞行路径,而数据采集方法则决定了无人机在飞行过程中如何获取高质量的数据。
无人机航测主要采集的数据包括航拍影像、激光雷达点云和地面控制点等。
1. 航拍影像采集:无人机通过航拍相机采集影像,航拍影像是制作高精度数字地图的重要数据源。
在航拍影像采集过程中,可以通过调整无人机的飞行高度、航向、姿态等参数来控制影像的分辨率和重叠度,从而获取更准确、更完整的数据。
2. 激光雷达点云采集:激光雷达可以获取地表的三维信息,对地形、建筑物和植被等进行高精度的测量。
在激光雷达采集过程中,可以通过调整激光雷达的扫描角度、扫描频率和点云密度等参数,来适应不同的测量需求和获取更细致的数据。
3. 地面控制点采集:地面控制点是用来对航测数据进行准确校正和定位的重要参考。
在航测任务中,可以通过人工放置地面标志物,如反光板、气球等,或者使用GPS定位系统来采集地面控制点。
无人机测绘中的航路规划原则

无人机测绘中的航路规划原则随着无人机技术的快速发展和广泛应用,无人机测绘成为测绘领域的一项重要技术手段。
在无人机测绘的过程中,航路规划是至关重要的一步,它直接影响着测绘效果和准确性。
本文将介绍无人机测绘中的航路规划原则,并结合实际案例进行讨论和分析。
一、安全第一原则无人机测绘飞行过程中的安全是最基本的原则,航路规划时必须以安全为首要考虑因素。
首先要保证无人机飞行的安全,合理选择飞行高度和飞行速度,避免与其他飞行器或障碍物发生碰撞。
其次,要考虑到地面的安全,选择安全的起飞和降落点,避免对人群和财产造成伤害。
此外,还需考虑到环境的安全,避免在恶劣的天气或其他不适宜的环境条件下进行测绘飞行。
二、高效性原则在无人机测绘中,航路规划的高效性是提高测绘效率和准确性的重要因素。
高效的航路规划可以减少无人机的飞行时间和航线长度,节省能源和成本开支。
为了实现高效性,需要结合测绘任务的具体需求,采用合理的路径规划算法和飞行策略,以达到最优的测绘效果。
三、全覆盖原则无人机测绘需要达到对目标区域的全覆盖,即对目标区域内的每个点都要进行测量和记录。
为了实现全覆盖,航路规划时需要选取合适的航线密度和间隔,确保无人机飞行路径能够经过每个待测区域。
同时,还需注意避免重复测量和漏测的情况发生,确保测绘结果的完整性和准确性。
四、适应性原则无人机测绘的航路规划需要具备一定的适应性,在面对不同任务需求和复杂环境时能够做出相应的调整和优化。
航路规划时需要考虑地形地貌、风力风向等因素,选择适应性强的航线策略。
同时,在测绘过程中,也需要根据实际情况对航路进行实时调整,以适应任务的需要和环境的变化。
五、数据质量保证原则无人机测绘的航路规划对保证数据质量至关重要。
航路规划时需要考虑测绘设备的参数和精度,合理安排无人机的航行路径,保证测绘数据的准确性和一致性。
此外,还要注意数据采集时的采样频率和采样精度,确保数据点的分辨率满足测绘需求。
综上所述,无人机测绘中的航路规划原则包括安全第一、高效性、全覆盖、适应性和数据质量保证。
测绘技术中的无人机航线规划方法
测绘技术中的无人机航线规划方法近年来,随着无人机技术的迅猛发展,无人机在各个领域的运用越来越广泛,尤其是在测绘技术中的应用更是备受关注。
无人机能够以高分辨率和高精度获取地面影像数据,从而为地图制作、资源调查和环境监测等提供了全新的途径。
而无人机的航线规划方法则是测绘技术中的关键环节之一。
首先,无人机航线规划需要考虑到飞行区域的特点。
不同的区域拥有不同的地形及环境条件,因此,在航线规划中需要根据实际情况进行灵活调整。
例如,在山区地形复杂的区域,需要根据地形变化来决定无人机的飞行高度和路径,以确保无人机能够顺利完成任务并避免与地形障碍物相撞。
其次,无人机航线规划需要考虑到任务的具体要求。
不同的测绘任务对无人机的航线布局有不同的要求。
例如,如果是用于制图的测绘任务,需要将无人机的航线布局得更为密集,以获取更多的地面影像数据。
而如果是用于环境监测的测绘任务,由于需要对大范围进行监测,无人机的航线布局则需要覆盖更大的区域。
因此,在航线规划中需要根据任务需求进行灵活布局,以满足测绘任务的要求。
另外,无人机航线规划还需要考虑到航线的安全性。
无人机的飞行安全是航线规划的重要因素之一。
在航线规划中,需要特别关注避免无人机的飞行路线与其他飞行器或建筑物相交。
同时,要制定相应的飞行规则和措施,确保无人机的飞行安全。
随着无人机技术的不断发展,一些先进的航线规划技术也开始应用于测绘领域。
其中,基于遗传算法、禁忌搜索等优化算法的无人机航线规划方法成为研究的热点。
这些方法能够通过模拟优化过程,找到最佳的航线规划方案。
同时,还有一些机器学习算法也被引入到无人机航线规划中,通过对历史航线数据进行学习和分析,提高无人机航线规划的效率和准确性。
此外,还有一些特殊环境下的无人机航线规划方法也值得关注。
例如,在水下测绘中,无人潜水器的航线规划需要考虑到水流的影响、水下地形的复杂性等因素,这对航线规划带来了更高的难度。
针对这种情况,研究者们通过引入自适应控制算法和遗传算法等方法,提出了一系列适用于水下测绘的无人机航线规划策略。
战场环境中多无人机任务分配的快速航路预估算法
第2 8卷第 5期
国 防 科 技 大 学 学 报 JU N LO AIN NV RIYO EE S E H O O Y O R A FNTO A U IE S FD F NE C N LG L T T
V 1 8N . 2O o. o5 O6 2
A s atT e tpeii r utl um n e e avh l U V )akaoao y i btee o pi t bt c:h e r co f lpe n andarl ei e A s t l t nid ̄me al l i a m l a d r mu d tn o m i i c s( s lci n tf d s c i ce pt l nn r l hrc re y uil pt drat e ad . rbb seR a p (R m t dw iue l a pa i po e ca t i db lp h a li dm ns Poai t 0dMas P M) e o a dt p h n g bm a ez m t ea s n e me i li h ss o a n
w to trc n tu t o d p ,C P M o d p a e rdc v o ts r pdy b p r e r k c s o o o t e m n . i u e o s c n r a ma s T R c u l n w p e it e r ue a il y u & i t i o t f sme ru e s g e t h r i g l n i g n h s s
文章编号 :0 1 46 20 )5 19 5 10 —28 (060 —00 —0
战场环 境 中 多无 人机 任务 分 配 的快 速航 路 预估 算 法
无人机应用中的路径规划技术使用技巧
无人机应用中的路径规划技术使用技巧随着科技的快速发展,无人机(Unmanned Aerial Vehicle, UAV)被广泛运用于各个领域,包括航拍摄影、农业监测、物流配送等。
而无人机的路径规划技术是实现其自主飞行的重要基础,它能够帮助无人机高效、安全地完成任务。
本文将介绍无人机应用中的路径规划技术的使用技巧,包括路径规划算法的选择、地图数据的处理以及实时路径调整。
首先,选择合适的路径规划算法是无人机路径规划的关键。
常用的路径规划算法包括A*算法、Dijkstra算法和遗传算法等。
A*算法是一种启发式搜索算法,适用于规模大的图像搜索。
Dijkstra算法是一种最短路径算法,适合用于无权图的路径规划。
遗传算法是一种模拟生物进化的算法,能够在复杂环境下找到最优解。
根据实际应用场景,选择适合的路径规划算法可以提高无人机的飞行效率和安全性。
其次,地图数据的处理对于路径规划的准确性至关重要。
地图数据包括地形图、地标点、航空管制区域等信息。
无人机需要准确地了解飞行区域的地形和障碍物分布,以避免碰撞和意外事件的发生。
在地图数据处理过程中,可以利用图像处理和机器学习的技术,对地图进行分割、分类和识别,提取出有用的信息,为路径规划提供有效的数据支持。
再次,实时路径调整是无人机路径规划中的重要环节。
路径规划在实际飞行过程中可能会受到环境因素的影响,比如天气、风力等变化。
如果无人机事先规划的路径无法满足任务需求或存在风险,就需要进行实时的路径调整。
在实时路径调整中,无人机可以通过激光雷达、机载相机等传感器获取即时环境信息,并利用路径规划算法重新计算最佳路径。
这样做能够保证无人机能够及时应对突发情况,确保飞行的安全性和效率。
另外,考虑节能和航时延长也是无人机路径规划的重要因素。
无人机的航时和续航能力直接影响其任务执行的能力。
路径规划应尽量避开不必要的冗余路径,减少航行距离和时间,从而降低能耗和延长航时。
合理规划无人机的航行速度和高度,选择合适的节能模式,能够有效提高无人机的续航能力,提高任务的完成率。
多无人机协同航路规划的共同进化方法
( .A r r sE u m n A a e y B in 0 0 5 C i ; .Scn rl r E u m n A ae y eig10 8 , hn ) 1 i c q i et cd m , eig10 8 , hn 2 eodAtly q i et cd m ,B in 00 5 C ia o f e p j a ie p j
o a u c l n o 'ca ie p t sf rUAVs n a lx by h n l e e a a t r ,s c s f e ,s ft ,c l — d c n q ik y f d e r r t a h o i l v ,a d c n fe i l a d e s v r l co s u h a u l ae y ol f i s n—a od n n o p r t n i o v i i g a d c o e a i .T e r s l l o s o t a h lo t m o v r e u c l n a o d l e rt o h e u t as h w t e a g r h c n e g sq ik y a d h s g o i a i s h t i n me
中图 分 类 号 :P 9 T 31 文献 标 识 码 : B
A Co — e o u i na y M e h d f r Co pe a i e UAVs Pa h Pl n ng — v l to r t o o o r tv t a ni
YE Yu n — y a a u n‘ MI Ch n—p n N u ig
meh d i smu ae n e c n ro o u p e so f n my ard f n e h i lt n rs l h w t a emeh to s i ltd u d r as e ai f p r sin o e i ee s .T e smu ai e ut s o tt t— s e o s h h
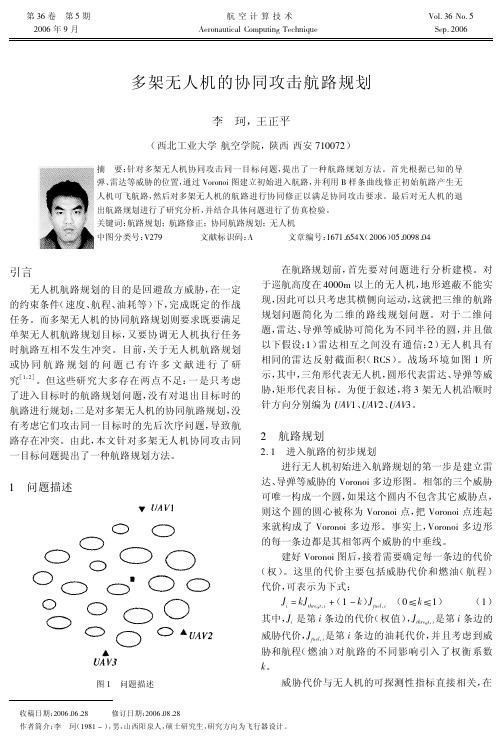
多架无人机的协同攻击航路规划
# $%&’($, " !!
* !"
!
+" #
" %, ( !$ ", * ,)
(&)
其中, ) 是威胁的总数目, + " 为第 " 条边的长度, ! ", *代 表第 " 条边上某一点到第 * 个威胁的距离, 它是长度 , 的函数。为了简化计算, 将每一条边均匀分成 ’ 段, 取 边长的 " ’, " &, ( ’ 等三个点, 采用数值积分的方 +" " " " * $ * $ $ ) !" ’ , !" & , !( ’, * * * ", ", ", 法计算第 * 个威胁对第 " 条边的威胁代价: # $%&’($, ", * ! !"
用 8 样条函数对初始航路进行曲线拟和, 即以 &7 " 节
) "4 ) 4・ ) ) ) ) ) ) ) ) ) ) ) ) ) ) ) ) ) ) ) ) ) 航 空 计 算 技 术) ) ) ) ) ) ) ) ) ) ) ) ) ) ) 第 ’# 卷 ・
第( 期
其它航路进行协同修正。具体方法是以基准航程加上 时间间隔内的飞行距离作为第二架临空的无人机的最 终进入航程, 以基准航程加上 ! 倍时间间隔内的飞行 距离作为第三架临空的无人机的最终进入航程, 以次 类推。除基准机外, 其它无人机的最终进入航路均可 能与上一节确定的航路存在差异, 因此需采用如下方 法处理: ") 如果无人机的最终进入航程小于上一节确 定的航程, 则从进入点始去掉长余的航路; !) 如果无人 机的最终进入航程大于上一节确定的航程, 则从进入 点始外推短缺的航路。由此可见, 经过航路的协同修 正后, 除基准机外的其它无人机均有可能重新规划进 入点。如图 # 所示, 白色三角形为 $%&" 、 $%&’ 原来 的进入点, 黑色三角形为经过协同修正后的进入点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
∑∫ ‖ p ( t)
i =1
M
tf
qi - x t, i ‖
4
0
dt
(X - Xt ) n =
(9)
(1)
M 表示威胁的个数 , x t, i 表示第 i个威胁所在的位置 , qi 表
此式表示势场内运动体与障碍物的相对距离 , n 是位置增益 系数 。 改进模型中增加了因式函数 ( X - X t ) n , 使势场内运动 体在靠近目标点的时候 ,在引力势场增加的同时 ,斥力势场也 随之减小 ,直到运动体到达目标点 ,引力势场达到最大 , 斥力 势场减至零 ,从而解决了在传统人工势场中出现局部最小值 的问题 。在此设 n = 2, 即得 : ( 10 ) ( X - X t ) 2 = ( X - X t ) 2 + ( Y - Yt ) 2 修订后的斥力为 : ρ( X, XO ) Kr 5 (X - Xt ) 2 + Fr = 5X ρ( X, XO ) 2
0 引言
由于现代战争中地面防空火力的加强以及雷达系统捕捉 目标能力的增强 , 战时反应时间越来越短 , 无人机在飞行过 程中受到敌方地面威胁程度也随之增大 , 盲目进入战场执行 任务会造成极大的损失 。为了提高多无人机的整体生存概率 和作战效能 ,发挥机群协同作战优势 ,需要在多无人机对敌方 防御区域内执行任务时 ,各自选择一条能够到达目标的航路 。 这些航路能保证其具有较小的雷达可探测概率及可接受的航 程 ,因此在执行任务之前要进行航路规划 。 航路规划是无人机领域的一个重要的研究课题 。航路规 划算法有很多 , 有启发式搜索 、 遗传算法 、 模拟退火 、 神经网 络、 动态规划等 。其中基于神经网络 [ 1 ] 、 基于遗传算法 [ 2 ] 和 基于 Voronoi图 [ 3 ] 的航路规划算法 , 把所有威胁点看成具有 相同的威胁属性 ,即为相同威胁体的航路规划 ,但对于实际环 境中的不同潜在威胁体 , 它们对于无人机的威胁明显是不同 的 。为了使无人机避开突发威胁 , 本文提出了一种基于改进 人工势场法的无人机航路重规划算法 , 此算法是一种针对动 态环境的在线实时航路规划算法 , 利用人工势场中的斥力函 数表示威胁 ,根据参数的不同可以表示不同的威胁体 ,更加贴 近实际环境 。无人机可以根据当前飞行任务环境 , 自主选择 一条较优的航路避开突发威胁 。
Kr
2 F r = ρ( X, XO )
2
Kr
则总成本可表示为 :
N-1
ρ( X, XO )
4
(X - Xt )
5(X - Xt ) ; ρ≤ρ m 5X
( 12 )
J =
∑J
j =1
( j, j+1 )
( 6)
4 多无人机航路重规划
有时无人机在飞行过程中敌方雷达所处位置和开机时间 事先不能确定 , 因此实时任务规划时面临的主要威胁就是这 种突发威胁 。处理突发威胁分为修改航路和选择航路 [ 9 ] 。 4. 1 修改航路 假定每架无人机都配备传感器探测雷达信号 ,所有关于 突发威胁的信息都被一个组的 UAV s共享 。如果其中一架无 人机在近实时的时间侦测到突发威胁 , 多无人机群在飞行中 应建立对抗可能发生的突发威胁的对策 。突发威胁也由圆形 区域表示 ,也分为危险区域和次危险区域 。当遇到突发威胁 时 ,无人机群会对突发威胁进行评估 ,如果每架无人机的初始 航路不进入突发威胁区域 ,重新规划航路是没有必要的 ,否则 所有未飞行的航路都应被重新规划 。遇到突发威胁时对航路 进行修改 ,情况有两种 : 一种在突发威胁周围无已知威胁 , 修 改航路时只需避开突发威胁即可 ; 另一种是在突发威胁周围 存在已知威胁 ,则需要在已知威胁和突发威胁中寻找到一条 较安全的航路 (见图 2 ) ,使无人机可以避开突发威胁 。 将最初的航路分为大小相同的 n 段 ,每一段都受到引力 和斥力 。当遇到突发威胁的时候 ,把突发威胁看作一个新的 斥力来源 ,则势场中新的合力可以表示为 ) m j x j ″= k ( x j- 1 - x j ) - k ( x j+1 - x j ) + b ( x j- 1 ′ - x j′
人工势场法是由 Khatib等提出的一种虚拟方法 [ 4 - 7 ] 。该 方法将运动体在环境中的运动视为一种在虚拟的人工受力场 中的运动 。障碍物对运动体产生斥力 ,目标点产生引力 。引 力和斥力的合力控制运动体的运动方向 ,确定运动体的位置 。 其引力定义为 Fa = k ( X - X g ) , 式中 : k 是正比例位置增 益系数 ; 其斥力定义为 :
第 29 卷第 5 期 2009 年 5 月
文章编号 : 1001 - 9081 (2009) 05 - 1480 - 03
计算机应用 Journal of Computer App lications
Vol . 29 No. 5 M ay 2009
多无人机航路重规划方法
孙明君 ,史建国
( sm j02603@126. com )
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved.
第 5期
J length =
孙明君等 : 多无人机航路重规划方法
1481
(X - Xt ) n + ( Y - Yt ) n
一个圆形区域来描述所遇到的威胁 。圆形区域的大小可以根 据实际的飞行任务环境来确定 , 比如雷达的可探测距离等 。 此圆形区域定义为两个部分 , 一部分是危险区域 , 由深色表 示 。另一部分是次危险区域 , 由浅色表示 (见图 1) 。在规划 航路的过程中 ,威胁区域是无人机的不可飞行区域 。次威胁 区域是一个威胁的临界状态 , 在规划航路的时候根据飞行任 务的环境来相应的选择无人机是否选择飞行经过此区域 。威 Ω被定义为一个封闭的 胁以外的空白区域为自由飞行区域 。 δ Ω表示威胁 连通区域 ,即是无人机飞行环境 ,包括目标点 xG 。 和自由空间之间的边界 。星号为目标点 ,三角形表示无人机 。
b( x
j+1
J ( j, j+1) = λJ length, ( j, j+1) + ( 1 - λ) J exposure, ( j, j+1)
其中系数 λ是权重系数 ,表示在航路规划中对威胁及油耗所 做出的选择倾向性 ,其值的选取是由航路制订者根据实践经 验按作战要求确定的 。
3 传统人工势场法的改进
图 1 飞行环境
2 航路代价的计算
无人机的每一个航路的总成本取决于航路的长度和暴露 于威胁的程度 , 令 p ( t) = [ x, y ] t ( t) ∈ R2 , p ( t) 表示在时间 t 时无人机在航路中所处的位置 , 则总成本定义 [ 1 ]为 :
1 飞行环境和任务描述
飞行过程中会有许多的威胁 ,本文以威胁点为圆心 ,构建
1 2
( 1. 海军航空工程学院 研究生管理大队 , 山东 烟台 264001; 2. 海军航空工程学院 兵器科学与技术系 , 山东 烟台 264001)
摘 要 : 提出了一种基于改进人工势场法的无人机航路重规划算法 。在航路重规划中 ,设置多个节点 ,将无人机 的航路分段 ,并重新构造斥力函数 ,无人机在突发威胁的边界调整航路 , 实时规划出避开突发威胁的可飞航路 ; 仿真 结果表明 ,该算法能够较好地满足航路规划的要求 。 关键词 : 无人机 ; 改进人工势场法 ; 航路规划 ; 实时规划 中图分类号 : TP279 文献标志码 : A
Rea l2tim e pa th replann in g a lgor ithm for unmanned aer ia l veh icles in threa ten in g env ironm en t
SUN M ing2jun , SH I J ian 2guo
1 2
(1. Graduate S tuden tsπ B rigade, N ava l A eronautica l Eng ineering Institu te, Yantai S handong 264001, Ch ina; 2. D epartm ent of O rdnance Science and Technology, N aval A eronau tica l Engineering Institute, Yan ta i S handong 264001, China )
^ j
exposure, ( j, j+1 )
( 4)
J^ exposure, ( j, j+1) =
- m in ^ j expo sure, ( j, j+1)
m ax ^ j exposure, ( j, j+1) - m in ^ j exposure, ( j, j+1)
( 5)
到威胁点的威胁程度可近似地认为正比于 1 / d4 , 由此构建 新的斥力为 : ρ( X, XO ) Kr 5 (X - Xt ) 2 + Fr = 4 5X ρ( X, XO ) 5
Abstract: U sing the modified potential field theory, the author p resented a real2ti m e path p lanning algorithm for Unmanned Aerial Vehicles (UAV ). The path was divided into subsections by some nodes in the course of flying, and then a new repulsive function was constructed by new flight environment . Sim ulation results indicate that this algorithm can satisfy the route p lan well . Key words: Unmanned Aerial Vehicles (UAV ) ; modified potential field theory; path p lanning; real2tim e p lanning