陀螺仪的基本特性
陀螺罗经指北原理

三、进动角速度与进动公式
进动角速度 :
MY ωP = H
My H ;
进动公式:
ω pz =
ω py
Mz =− H
四、赖柴尔定理(P6): 外力矩 = 动量矩矢端的线速度 即:M=up 结论:表示为当外力矩作用的方向与 动量矩的方向垂直时,在动量矩矢端 将产生一个线速度,该线速度的大小 与外力矩相等,方向与外力矩的方向 相同
阻尼的目的 将等幅运动变为减幅运动,最后衰减 至子午面上的某个稳定位置,以实现 稳定指北。 阻尼的方法 压缩长轴法——水平轴阻尼法 压缩短轴法——垂直轴阻尼法
水平轴阻尼法
1.定义:由阻尼设备产生水平轴的阻尼力矩以实 现阻尼的方法。 2.原理: •要求阻尼力矩引起的进动线速度(u3)总是指向 子午面 •在第1和第3象限内,主轴指北端抵达子午面时高 度角θ减幅<θ等幅 ;在第2和第4象限内,主轴指北端 到达水平面时α减幅<α等幅。渐次衰减至稳定位置r
二、陀螺仪的两个特性
1.定轴性:不受任何外力矩作用 的自由陀螺仪的主轴将保持其 初始空间方位不变。(即惯性 空间) 2.进动性:在外力矩M的作用 下,3自由度陀螺仪主轴动量矩 H矢端将以捷径趋向外力矩M矢 端作进动。(H→M) ¾角速度ω ¾动量矩H=Jω ¾外力矩M=r*F ¾右手定则
FHale Waihona Puke F1图1-14图1-15
主轴在方位上的变化
主轴在高度上的变化
地球自转角速度的水平分量和垂直分量 在北纬任意纬度处,可以将地球自转角速 度分解到ON轴和OZ0轴上,得到两个 分量ω1和ω2,在ON轴上的ω1称为水 平分量,在OZ0轴上的ω2称为垂直分 量。 ⎧ω1 = ω e cos ϕ 显然,在北纬 ⎨ω = ω sin ϕ
陀螺仪原理1基本特性

陀螺仪原理1基本特性陀螺仪是一种测量和操控物体旋转姿态和角速度的仪器。
它的原理基于陀螺的力矩和角动量守恒。
陀螺仪主要由陀螺和测量装置组成,其中陀螺是陀螺仪的核心部件,而测量装置用于测量陀螺的角速度和姿态。
陀螺的基本特性如下:1.稳定性:陀螺具有很高的稳定性,不受外力的干扰。
这是因为陀螺在转动过程中,会生成一个力矩,使得它的旋转轴保持不变。
这种稳定性使得陀螺仪能够准确地测量物体的旋转姿态和角速度。
2.精度:陀螺仪具有很高的精度,能够测量微小的角度变化和角速度。
3.抗干扰性:陀螺仪具有很强的抗干扰能力,可以排除外界的振动和加速度干扰。
这是通过使用惯性测量装置和滤波算法来实现的。
4.快速响应:陀螺仪能够快速地响应外界的变化,准确地反映物体的旋转姿态和角速度变化。
陀螺仪的工作原理如下:1.陀螺力矩:当陀螺旋转时,其转动轴总是保持不变。
这是因为旋转产生了一个力矩,使得陀螺的旋转轴始终与外界力矩的方向相同。
这个力矩称为陀螺力矩,它使得陀螺能够保持稳定的旋转。
2.角动量守恒:根据角动量守恒定律,陀螺的角动量大小和方向在没有外力作用下保持不变。
这意味着陀螺的旋转轴在转动过程中保持不变。
3.测量装置:测量装置通过测量陀螺的角速度和姿态来获取物体的旋转信息。
常见的测量装置包括陀螺仪芯片、加速度计、磁力计等。
这些装置能够感知陀螺的角速度和加速度,并通过信号处理和滤波算法将其转化为测量结果。
陀螺仪在许多领域都有广泛的应用,包括航空航天、导航、汽车行驶控制、无人机、手机电子稳定器等。
它的基本特性和工作原理使得其成为一种重要的测量和控制工具,可以提高系统的稳定性和精度。
随着技术的不断发展,陀螺仪的性能和应用范围还将进一步扩大。
陀螺仪基本特性试验
陀螺仪基本特性试验陀螺仪基本特性试验一、实验目的1.用实验的方法观察并验证陀螺仪的基本特性——定轴性,进动性和陀螺力矩效应。
2.学习使用陀螺实验用主要设备——转台。
3.利用线性回归方法进行数据处理。
二、实验设备1.TZS-74陀螺仪表综合试验转台。
2.双自由度陀螺仪。
3.砝码。
4.实验用电源:交流220V,50~(转台用)36V,400~三相电源。
三、实验内容和步骤(一)定轴性实验1.陀螺马达不转时,开动转台,观察陀螺仪是否有定轴性。
2.接通电源,几下陀螺转子的转速方向,开动转台观察转子转动时陀螺仪的定轴性。
(二)进动性实验1.外加力矩,观察进动现象。
根据进动规律判断角动量H的方向,并和上面记下的转速方向做一比较。
2.测量进动角速度和外加力矩的关系:(1)在加力杆的前后标尺上分别加不同重量的砝码,记录进动的角度与实践,列表并计算出对应于每一外加力矩的进动角速度值,画出实验曲线。
(2)根据进动规律x Mω=(H J=Ω)计算出对应于每一外加H力矩的进动角速度,画出理论曲线。
(3)将实验曲线与理论曲线进行比较并说明产生误差的原因。
(4)用线性回归的方法进行数据处理,并通过求回归系数的方法求出角动量H的值。
3.测量进动角速度和角动量的关系在同一外力矩作用下,测量陀螺马达在额定转速下和断电一分钟后的进动角速度(断电一分钟后马达转速低于额定转速)。
根据实验结果说明进动角速度和角动量的关系。
(三)陀螺力矩实验1.开动转台,使双自由度陀螺仪基座转动,观察有无陀螺力矩效应,并说明原因。
2.观察双自由度陀螺仪在进动时的陀螺力矩效应。
用手对内框架加力矩,用手的感觉来测量陀螺力矩的大小和方向。
说明陀螺力矩产生的原因。
3.拧紧固定外框架的螺钉。
用手对内框架加力矩。
观察此时转子轴的运动方向。
用手感觉此时对手是否有陀螺力矩作用,加以分析。
4.测量陀螺力矩和进动角速度的关系为了达到测量陀螺力矩的目的,我们拧紧固定外框架的螺钉,是陀螺仪成为单自由度陀螺仪。
陀螺罗经指北原理综述
U2
X
在哪个轴上? N ?只能加于水平
轴(oY )上。
E
V2
?原则:必须人为施加水平轴控制力矩(M y),产生一个u2
使其与v2大小相等,方向相反,才能克服? 2影响。
陀螺罗经指北原理概述
(一)下重式罗经的控制力矩
1. 下重式罗经灵敏(指北)部分的结构:
陀螺转子
Z
核心-液浮、双转子陀螺球
(252mm )
量矩H 矢端以捷径趋向外力矩 M 矢端,作进动运动或
旋进运动。( H →M ) z
例: 1 - 1
M
?p? H
? py M y
P4 Fig1-4
? pz M z
o
y
My
F
H
进动方向: 右手定则
xF
二、 陀螺仪及其特性
陀螺罗经指北原理概述
?
pz
?
My H
;
?
py
?
?
Mz H
陀螺罗经指北原理概述
(一)地球自转产生的影响
液体连通器式:
My 产生方式: 重心下移
液体连通器某端 容器多余液体
M y 指向: 总是指北
总是指南
H指向: X轴正方向
X轴负方向
M y算式: M y ? ? M?
M y ? M?
u2 ? M y ? ? M?
u2 ? ? My ? ? M?
u2 ? ? M?
陀螺罗经指北原理概述
1 )主轴指北端投影图: (下重式罗经为例 )
4 )椭圆运动轨迹的特征:
Z。N的N点不断向W移 动。 南纬?反之
PS
陀螺罗经指北原理概述
?
e
? ?
陀螺经纬仪原理与应用

三、陀螺仪的运动方程
一、欧拉动力学方程
因此:
三、陀螺仪的运动方程
一、欧拉动力学方程 当刚体运动时,角动量H相对惯性坐标系的变化关系可用下式表示:
上式即为哥氏转动坐标定理:在惯性坐标系中,某一向量函数对时 间的变化率(绝对变化率)等于同一向量在动坐标系中对时间的变化率 (相对变化率)与动坐标系对固定坐标系旋转角速度向量与该向量本身 的向量积进行相加。 下面在附录Ⅲ来证明该等式
陀螺经纬仪原理与应用
报告主要内容
一、概述 二、陀螺的特性及力学原理 三、陀螺仪的运动方程 四、自由陀螺仪的视运动 五、陀螺经纬仪的指北原理 六、陀螺经纬仪的应用
一、概述
什么是陀螺?
绕一个支点高速转动的刚体称为陀螺(top)。
一、概述
什么是陀螺仪?
把陀螺安装在专门的悬挂装置上,就构成了陀螺仪(gyroscope)。
d ri 因为 dt vi vi vi 0 根据牛顿第二定律
d vi mi mi ai Fi dt
Fi 为作用在质点上的外力,则上式变为
d Hi ri Fi M dt
其中 M ,为作用在刚体所有质点上的外力对O点的力矩向量之总和。
三、陀螺仪的运动方程
二、陀螺仪运动方程 下面研究陀螺仪主轴绕外环轴的转角α和绕内环轴的转角θ的变化 规律。由图1可知: ( 6)
对
y
, z 求导数有
( 7)
将(6)、(7)代入(5)式中,整理可得:
( 8)
三、陀螺仪的运动方程
二、陀螺仪运动方程 因为α和θ在陀螺实际工作时是很小的,因此可以认为: , 可简化为 ,
航空陀螺仪
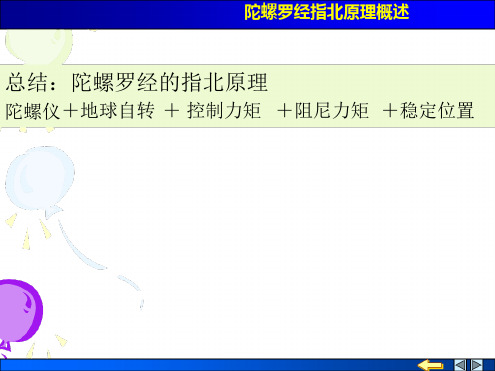
航空陀螺仪一、陀螺仪的基本知识陀螺玩具旋转时,能够直立在地上;而且转得愈快,立得也愈稳;即使给它一个冲击,也只是晃动而不会倒下。
陀螺的这种特性可以被利用来做成仪表用来测量飞机的姿态角、航向角和角速度。
航空陀螺仪表中的陀螺仪,是把绕自转轴(又叫转子轴)高速旋转的转子用框架支撑起来,使转子绕垂直于自转轴方向可以自由转动的这样一种装置。
图8.1表示的是,转子安装在内环和外环这两个框架中,转子可绕自转轴高速旋转,转子同内环可绕内环轴转动,转子同内环和外环还可绕外环轴转动这样支承起来的转子可以绕着垂直于自转轴的两根轴转动,这种装置称为三自由度陀螺仪。
若转子仅安装于内环中这样支承起来的转子只能绕着垂直于自转轴的一根轴转动这种装置称为二自由度陀螺仪。
三自由度陀螺仪的基本特性之一是稳定性(又叫定轴性)。
当转子高速旋转时,因具有很大的惯性,自转轴能够保持原来的方向稳定;无论基座怎样转动,自转轴所稳定的方向都将保持不变;同使受到冲击作用,自转轴也仅在原来的方位附近作一种高频微幅的振荡运动。
陀螺仪具有抵抗干扰作用而力图保持自转轴方向稳定的特性叫做螺仪的稳定性。
陀螺仪的又一基本特性是进动性。
当转子高速旋转时,若外力矩绕外环轴作用,陀螺仪将绕内环轴转动;若外力矩绕内环轴作用,陀螺仪将绕外环轴转动。
陀螺仪转动角速度方向与外力矩作用方向互相垂直的特性,叫做陀螺仪的进动性。
进动角速度的方向取决于转子动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,可用右手定则确定。
进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为 =M/H。
如果这种进动由陀螺仪中的干扰力矩引起,则叫做漂移,漂移角速度即漂移率是衡量各种陀螺仪表精度的最重要的指标。
至于二自由度陀螺仪的特性,就与三自由度陀螺仪不同。
二自由度陀螺仪少了垂直于内环轴和自转轴方向的转动自由度。
这样,当基座绕着这个缺少自由度的轴线转动时,通过内环轴上一对轴承的推动,就强迫陀螺仪跟随基座转动;与此同时,基座作用于内环两端轴承上的推力形成了推力矩将强迫陀螺绕内环轴进动,使自转轴趋于基座转动角速度的方向重合。
陀螺定义 基本特性及分类

第五章陀螺仪基本理论主要内容陀螺仪的定义、基本特性及分类陀螺仪的定义基本特性及分类陀螺力学基础陀螺仪基本特性的力学解释自由陀螺仪的视运动两自由度陀螺仪的运动方程、基本分析 单自由度陀螺仪的基本特性51陀螺仪的定义基本5.1 陀螺仪的定义、基本特性及分类本节主要内容陀螺仪的定义陀螺仪的分类陀螺仪的基本特性玩具陀螺地陀螺转碟抖空竹一陀螺仪的定义一、陀螺仪的定义凡是绕回转体的对称轴作高速旋转的刚体都称为陀螺。
主轴或极轴赤道轴、赤道平面赤道轴赤道平面陀螺仪是陀螺及悬挂装置的总称。
转陀螺仪由转子、内环、外环和基座组成。
悬挂装置称为万向支架。
万向支架陀螺仪具有保持给定方位并能反映载体角位移或角速度的能力称为陀螺效应。
凡是能够产生陀螺效应的装置都可称为陀螺仪。
陀螺仪陀螺仪坐标系——OX轴与转子轴重合,OY轴与内环轴重合,OX和OY轴的交点O为坐标原点,而OZ轴垂直轴重合为坐标原点而于XOY平面。
二、陀螺仪的分类1、根据主轴自由度数目分:(1)两自由度陀螺仪(2)单自由度陀螺仪(2)单自由度陀螺仪固定内、、外环中固定内任意一个2、根据陀螺仪重心与支架中心的位置分):无定位陀螺仪)平衡陀螺仪((1)平衡陀螺仪(无定位陀螺仪陀螺仪的重与支架中重合自由陀陀螺仪的重心与支架中心()螺仪)螺仪):(2)重力陀螺仪(定位陀螺仪定位陀螺仪)陀螺仪的重心偏离支架中心()沿主轴水平偏移(a)沿主轴水平偏移(b )沿赤道轴偏移(c)沿主轴垂直偏移3、根据陀螺仪的支承方式不同可分为:方式分为(1)框架陀螺仪用万向支架悬挂陀螺转子傅仪¾转子陀螺的起源18521852年年,法国科学家傅科首次提出法国科学家傅科首次提出““陀螺仪陀螺仪””概念概念,,并利用其定轴性设计了一种最早的陀螺概并用其螺仪,用于观察地球自转现象用于观察地球自转现象。
50年年未制造实用的陀螺仪此后此后5050年,未制造实用的陀螺仪年,未制造实用的陀螺仪制约因素:转子的高速旋转和支承方式¾转子陀螺的发展安休兹利用框架式1908安休兹利用1908异步电动机陀螺仪,研制陀螺罗盘,研制陀螺罗盘,滚珠轴承陀螺仪实用的开端机械轴承支承¾转子陀螺的发展机械轴承存在摩擦力矩,不可能使陀螺。
陀螺罗经
五、视运动基本知识
1.坐标系
参考坐标系:以陀螺仪支架点O为公共原点
(1)地理坐标系(航海学上常用的)ONWZ。
(2)陀螺坐标系(动坐标)OXYZ
(3)惯性坐标系Oξηζ(不常用) 上述三个座标系之间的运动关系是:
(1)陀螺座标系相对地理座标系之间的运动为相对运动 (2)地理座标系的运动代表地球自转运动及船舶运动在内的 牵连运动 (3)陀螺座标系相对于惯性空间的运动为绝对运动,实际上 是相对运动与牵连运动的矢量和。即书上所讨论的陀螺仪的运 动都是指相对于惯性空间的绝对运动!
重心下移后如何使主轴自动找北
图1-23
液体连通器罗经灵敏(指北)部分的结构
动量矩 指南(ox轴负向 ) 连通器内装水银或硅油
图1-24
液体连通器如何使主轴指北端自动找北
M Y 2R2Sg sin
下重式罗经与上重式罗经的比较
液体连通器产生的重力控制力矩与下重式陀螺 球产生的重力控制力矩指向刚好相反,而二 者的动量矩H指向正好相反,所以两者陀螺仪 主轴指北端(OX轴正向)进动的规律相同
M C
{ 物理意义 : u2= V2+ u3 V1=0
(4)罗经的稳定时间:罗经从起动到其指向精 度满足航海精度要求(土1°)所需的时间。 大约为2.5 TD=3h 45min
垂直轴阻尼法
定义:由阻尼设备产生的阻尼力矩作用于罗经的垂直轴OZ上以实 现阻尼的方法,称为垂直轴阻尼法。
图1-30
液体连通器式罗经的减幅摆动
不受任何外力矩作用的陀螺仪。
二、陀螺仪的两个特性
1.定轴性:不受任何外力矩作 用的自由陀螺仪的主轴将保持 其初始空间方位不变。(即惯 性空间)
2.进动性:在外力矩M的作用下, 3自由度陀螺仪主轴动量矩H矢 端将以捷径趋向外力矩M矢端 作进动。(H→M) ➢角速度ω ➢动量矩H=Jω ➢外力矩M=r*F ➢速度(u3)总是指向 子午面
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.2 陀螺仪的基本特性
双自由度陀螺的两个基本特性是:进动性和定轴性。
3.2.1 陀螺仪的进动性
简单的说陀螺的进动性是指当陀螺受到外力矩的作用时,所产生的一种复合扭摆运动,其进动角速度的方向垂直于外力矩的方向,其进动角速度的大小正比与外力矩,或者说,陀螺进动的方向为角动量以最短距离导向外力矩的方向。
为了便于理解,我们以二自由度的框架陀螺为例,其进动表现为:外力矩如沿着内框轴作用时,则陀螺仪绕外框转动;若外力矩沿外框轴作用时,则陀螺绕内框转动。
3.2.2 陀螺仪的定轴性
陀螺的定轴性是指转子绕自转轴高速旋转时,如果不受外力矩的作用,自转轴将相对于惯性空间保持方向不变。
换言之,双自由度陀螺具有抵抗干扰力矩,力图保持转子轴相对惯性空间的方位稳定的特性。
在实际的陀螺仪中,由于结构和工艺的不尽完善,总是不可避免的存在干扰力矩,因此,考查陀螺仪的定轴性,更有实际意义的是考查有干扰情况下,在有限的时间内,自转轴保持方位稳定的能力。
由陀螺仪的进动性可以知道,在干扰力矩的作用下,陀螺将产生进动,使得自转轴偏离原有的方位,这种方位偏差就称为漂移。
一般说来,框架陀螺仪的漂移较大,从几度每小时到几十度每小时不等,这就是为什么框架式陀螺测斜仪在测量前要求标桩对北,测量结束后还必须校北的原因。
3.3 陀螺仪的表观进动
由于陀螺仪自转轴相对于惯性空间保持方位不变(当陀螺仪的漂移足够小;同地球自转引起的地球相对惯性空间方位变化比较,可近似的认为陀螺仪相对惯性空间的方位不变),而地球以其自转角速度绕极轴相对惯性空间转动,所示观察者若以地球为参考基准,将会看到陀螺仪自转轴相对地球转动,这种相对运动称为陀螺仪的表观运动。
表观运动的实质是陀螺仪可以跟踪测量地球自转角速度。
例如在地球任意纬度处,放置一个高精度的二自由度陀螺仪,并使其自转轴处于当地垂线位置,如图所示,可以看到陀螺的自转轴将逐渐偏离当地的地垂线,而相对地球作圆锥面轨迹的表观进动,每24小时进动一周。
若使得自转轴处于当地子午线位置,此时将看到陀螺仪自转轴逐渐偏离当地子午线,也相对地球作圆锥面轨迹的表观进动,每24小时一周。
3.4 坐标系
在对地球角速度进行测量时,我们首先需要了解几种主要的坐标系:惯性坐标系和地理坐标系。
l 惯性坐标系:通常以日心惯性坐标系代表惯性空间,其坐标原点选在太阳中心,坐标轴指向恒星。
l 地球坐标系:地理坐标系与地球固联,随着地球一起转动。
坐标原点为地球的中心,轴与地球自转轴重合,轴指向本初子午面与赤道平面交线,轴构成右手坐标系。
l 地理坐标系:在设定地理坐标系时,原点为仪器的中心或地球表面是的一点,和在当地水平面内,沿当地地垂线指向上方。
习惯上我们以“东、北、天”或“北、西、天”为顺序构成右手坐标系。
因此,地球的自转可以看作是地球坐标系相对惯性坐标系的转动,在设定了地理坐标系后,我们就可以计算当地地理坐标系的绝对角速度。
若我们以“北、西、天”为地理坐标系,则地球坐标系相对惯性坐标系的转动角速度在地理坐标系
上的投影为:
如图所示:
,
,
可见地球角速度只在北向分量和天顶向上有分量,或者说,具有水平分量和垂直分量。
3.5 陀螺测斜仪的测量原理
使用陀螺测斜仪进行测量目的是根据各测量点的方位、倾斜角来确定井眼轴线的空间位置,同时为了与钻具配合,必须随时得到工具面角。
在进行测量时,我们选取如下的两个坐标系:地理坐标系(北西天)和探管坐标系,最初两坐标系各相应的轴彼此重合。
方位角、倾斜角和工具面角分别对应于坐标系的相位旋转:
l 首先系绕轴负方向旋转角度A,此即方位角,得到系;
l 然后系绕轴负方向旋转角度I,此即倾斜角,得到系;
l 最后系绕的负方向旋转角度T,此即工具面角,得到系;
根据上述规定的各坐标系之间的相对转角关系可以得到地
理坐标系与探管坐标系之间的方位角余弦矩阵,使得有如下关系成立:
(1)地球自转角速度与重力加速度在地理坐标系中的分量是已
知的,根据前面的分析,可以得到:
(2)因而可以得到地球自转角速度和重力加速度在探管坐标系中的各个分量:
(3)
(4)
(5)
(6)
(7)
(8)
其中:
———为地球自转角速度的水平分量
———为地球自转角速度的垂直分量
———为当地纬度
由(3)~(8)式我们可以求出、、:
(9)
(10)
(11)。