次多项式拟合方程
趋势面拟合

趋势面拟合趋势面拟合(Trend Surface Fitting)是一种数据建模方法,用于寻找数据中的趋势和模式。
它广泛应用于地理信息系统、地质勘探、气象预测等领域。
在趋势面拟合中,我们假设数据点的分布在一个平面上,并尝试找到最适合数据点的平面方程。
这个平面方程可以用来预测未知数据点的数值,或者分析数据中的趋势。
趋势面拟合的基础概念是多项式回归。
多项式回归是通过用一个多项式函数近似拟合数据点,来描述数据间的关系。
在趋势面拟合中,我们通常使用二维二次多项式来拟合数据,即:Z = a + bx + cy + dx^2 + exy + fy^2其中Z是数据点的数值,x和y是数据点的坐标,a、b、c、d、e、f是待定参数。
为了找到最适合数据点的参数,我们需要使用优化方法,如最小二乘法。
最小二乘法的目标是最小化实际数据点与拟合曲面之间的残差平方和。
通过求解最小二乘法的优化问题,我们可以得到最佳的参数估计。
对于一组离散点数据,趋势面拟合可以通过以下步骤实现:1. 收集和整理数据,确定数据点的坐标和数值。
2. 创建一个二维空间网格,在网格上均匀采样若干个点。
3. 对于每个网格点,计算其对应的Z值,代入二维二次多项式中。
4. 使用最小二乘法拟合数据点,找到最适合的参数估计。
5. 根据参数估计的方程,预测其他未知数据点的数值。
需要注意的是,趋势面拟合是一种插值方法,只适用于数据点周围的区域。
如果要预测远离数据点的位置,可能需要更复杂的模型和方法。
总结起来,趋势面拟合是一种用于数据建模和预测的方法,可以找到数据中的趋势和模式。
通过拟合一个二维二次多项式,我们可以预测未知数据点的数值,并进行数据分析和预测工作。
c语言二次函数拟合,二次函数拟合算法

c语⾔⼆次函数拟合,⼆次函数拟合算法
⼆次函数拟合算法
原理:
在给定⼀组数据序列(x i,y i),i=0,1,2…m,⽤⼆次多项式拟合这组数据时,设
p(x)=a0+a1x+a2x2,则根据拟合函数与数据序列的均⽅误差最⼩原则,可以得到⼆次多项式函数拟合的矩阵计算⽅程如下所⽰:(
m x i
m
i=1
x i2
m
i=1
x i
m
i=1
x i2
m
i=1
x i3
m
i=1
x i2
m
i=1
x i3
m
i=1
x i4
m
i=1
)(
a0
a1
a2
)= (
y i
m
i=1
x i y i
m
i=1
x i2y i
m
i=1
)
在我们的计算库伦效应实例中,Y即为每个Cycle对应的DischargeC/ChargeC的⽐值,X即
为每个Cycle对应的数字。
代码中定义的三个矩阵XX,AA,YY则分别对应原理公式中等式左边X系数矩阵,A系数矩阵
以及等式右边包含Y系数的矩阵。
具体步骤:
1:先将矩阵中需要的所有量计算出来,并且存放在XX,AA,YY三个矩阵中。
2:为了求得系数矩阵AA,我们需要先把XX矩阵求逆,然后与YY矩阵相乘。
函数MRinv
即为矩阵求逆的函数,返回时存放其逆矩阵。
3:得到系数矩阵AA之后,即得到了拟合好的⼆次函数,将此⼆次函数输出在Excel表中。
具体代码实现:步骤1对应代码:。
754期【导数】三种函数拟合放缩比较——泰勒展开、帕德逼近、洛朗级数
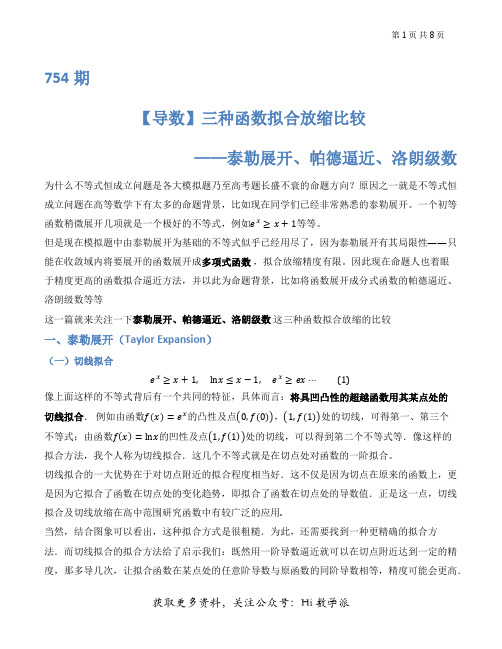
754期【导数】三种函数拟合放缩比较——泰勒展开、帕德逼近、洛朗级数为什么不等式恒成立问题是各大模拟题乃至高考题长盛不衰的命题方向?原因之一就是不等式恒成立问题在高等数学下有太多的命题背景,比如现在同学们已经非常熟悉的泰勒展开。
一个初等函数稍微展开几项就是一个极好的不等式,例如e x≥x+1等等。
但是现在模拟题中由泰勒展开为基础的不等式似乎已经用尽了,因为泰勒展开有其局限性——只能在收敛域内将要展开的函数展开成多项式函数,拟合放缩精度有限。
因此现在命题人也着眼于精度更高的函数拟合逼近方法,并以此为命题背景,比如将函数展开成分式函数的帕德逼近、洛朗级数等等这一篇就来关注一下泰勒展开、帕德逼近、洛朗级数这三种函数拟合放缩的比较一、泰勒展开(Taylor Expansion)(一)切线拟合e x≥x+1, lnx≤x−1, e x≥ex⋯ (1)像上面这样的不等式背后有一个共同的特征,具体而言:将具凹凸性的超越函数用其某点处的切线拟合.例如由函数f(x)=e x的凸性及点(0,f(0)),(1,f(1))处的切线,可得第一、第三个不等式;由函数f(x)=lnx的凹性及点(1,f(1))处的切线,可以得到第二个不等式等.像这样的拟合方法,我个人称为切线拟合.这几个不等式就是在切点处对函数的一阶拟合。
切线拟合的一大优势在于对切点附近的拟合程度相当好.这不仅是因为切点在原来的函数上,更是因为它拟合了函数在切点处的变化趋势,即拟合了函数在切点处的导数值.正是这一点,切线拟合及切线放缩在高中范围研究函数中有较广泛的应用.当然,结合图象可以看出,这种拟合方式是很粗糙.为此,还需要找到一种更精确的拟合方法.而切线拟合的拟合方法给了启示我们:既然用一阶导数逼近就可以在切点附近达到一定的精度,那多导几次,让拟合函数在某点处的任意阶导数与原函数的同阶导数相等,精度可能会更高.这正是泰勒展开的思想:构造一个各项系数待定的多项式,并使它在某点处的任意阶导数与原函数的同阶导数相等.为什么泰勒选择的是多项式函数,而不是分式函数,原因之一就是多项式求导相对容易,便于操作,并没有考虑精度问题。
时间趋势t的三次多项式

时间趋势t的三次多项式时间趋势是描述随时间变化的模式或趋势的一种数学模型。
在时间序列分析中,我们经常使用多项式函数来拟合时间趋势。
在本文中,我将介绍时间趋势t的三次多项式模型,并解释如何使用该模型来分析和预测时间序列数据。
三次多项式是一个三次方程,具有以下形式:f(t) = at^3 + bt^2 + ct + d,其中a、b、c和d是常数,t是时间变量。
这个模型可以拟合出一个平滑的曲线,可以描述时间序列数据的趋势。
首先,我们需要收集时间序列数据,这些数据可以是任何随时间变化的变量的观测值,比如销售额、股票价格、气温等等。
然后,我们可以使用回归分析的方法来拟合三次多项式模型。
回归分析是一种统计方法,可以确定模型参数的最佳值,使得模型与观测数据之间的误差最小化。
对于三次多项式模型,我们可以使用最小二乘法来估计模型的参数。
最小二乘法的基本思想是找到一组参数值,使得观测数据与模型预测值的差异的平方和最小化。
通过求解最小二乘问题,我们可以得到三次多项式模型的最佳参数估计值。
一旦我们拟合了三次多项式模型,我们就可以使用它来分析和预测时间序列数据。
通过观察模型的曲线,我们可以得出一些有关时间序列数据的结论。
例如,如果模型的曲线是递增的,说明随时间的推移,变量的值在增加;如果曲线是递减的,说明随时间的推移,变量的值在减少。
此外,我们还可以使用三次多项式模型来预测未来的数值。
通过输入未来的时间值,我们可以使用模型的参数估计值来计算预测值。
然而,需要注意的是,预测的准确性取决于拟合模型的质量和未来时间的范围。
在实际应用中,时间趋势的三次多项式模型可以用于各种领域的时间序列数据分析,如经济预测、股市分析、天气预报等。
通过对时间序列数据的建模和预测,我们可以更好地理解数据的变化趋势,帮助做出决策和制定策略。
总结起来,时间趋势的三次多项式模型是一种描述时间序列数据的数学模型,通过拟合模型的参数,我们可以分析时间序列数据的趋势和预测未来的数值。
二元二次多项式拟合

二元二次多项式拟合二元二次多项式拟合是一种常用的数学方法,它可以通过给定的数据点来找到一个最佳的二次曲线来拟合这些数据。
在实际应用中,二元二次多项式拟合被广泛用于数据分析、回归分析和模型建立等领域。
二元二次多项式拟合的基本思想是根据给定的数据点,通过最小二乘法来确定一个二次曲线,使得该曲线与数据点之间的误差最小化。
具体而言,二元二次多项式拟合的目标是找到一个二次函数,使得该函数能够最好地描述数据的变化趋势。
在进行二元二次多项式拟合时,首先需要收集一组数据点。
这些数据点可以是实验数据、观测数据或者是通过其他方法得到的数据。
然后,通过最小二乘法来确定二次曲线的系数。
最小二乘法是一种常用的数学方法,它可以通过最小化误差平方和的方式来求解拟合曲线的系数。
为了进行二元二次多项式拟合,我们需要假设二次曲线的方程形式为y = ax^2 + bxy + cy^2 + dx + ey + f。
其中,a、b、c、d、e、f是待确定的系数。
通过最小二乘法,我们可以得到这些系数的最佳估计。
在实际操作中,二元二次多项式拟合可以通过计算矩阵的逆来求解。
具体而言,我们可以将数据点构成的矩阵表示为X,将对应的函数值构成的矩阵表示为Y。
然后,通过求解方程AX = Y,可以得到系数矩阵X的估计值。
其中,A是由数据点的坐标组成的矩阵,X是由系数组成的矩阵,Y是由函数值组成的矩阵。
二元二次多项式拟合在实际应用中具有广泛的应用价值。
例如,在工程领域,二元二次多项式拟合可以用于分析工程数据,预测工程参数的变化趋势,从而指导工程设计和优化。
在经济领域,二元二次多项式拟合可以用于分析经济数据,预测经济指标的发展趋势,为政策制定和决策提供科学依据。
在生物医学领域,二元二次多项式拟合可以用于分析医学数据,研究疾病的发展规律,为临床诊断和治疗提供支持。
二元二次多项式拟合是一种重要的数学方法,它可以通过最小二乘法来确定一个最佳的二次曲线,从而能够较好地描述数据的变化趋势。
c++最小二乘法二次多项式拟合

c++最小二乘法二次多项式拟合最小二乘法是一种常用的曲线拟合方法,可以用于拟合二次多项式。
以下是用C++实现最小二乘法二次多项式拟合的示例代码:#include <iostream>#include <vector>#include <cmath>using namespace std;// 定义二次多项式拟合的函数void quadraticLeastSquaresFit(const vector<double>& x, const vector<double>& y, double& a, double& b, double& c){int n = x.size();// 定义矩阵A和向量Bdouble A[3][3] = {0};double B[3] = {0};// 构造矩阵A和向量Bfor(int i=0; i<n; i++){double xi = x[i];double yi = y[i];A[0][0] += xi * xi;A[0][1] += xi;A[0][2] += 1.0;A[1][1] += xi;A[1][2] += 1.0;A[2][2] += 1.0;B[0] += xi * yi;B[1] += yi;B[2] += 1.0;}// 求解线性方程组Ax = Bdouble detA = A[0][0] * (A[1][1] * A[2][2] - A[2][1] * A[1][2])- A[0][1] * (A[1][0] * A[2][2] - A[2][0] * A[1][2])+ A[0][2] * (A[1][0] * A[2][1] - A[2][0] * A[1][1]);double invA[3][3] = {0};// 计算矩阵A的逆矩阵invA[0][0] = (A[1][1] * A[2][2] - A[1][2] * A[2][1]) / detA;invA[0][1] = -(A[0][1] * A[2][2] - A[0][2] * A[2][1]) / detA;invA[0][2] = (A[0][1] * A[1][2] - A[0][2] * A[1][1]) / detA;invA[1][0] = -(A[1][0] * A[2][2] - A[1][2] * A[2][0]) / detA;invA[1][1] = (A[0][0] * A[2][2] - A[0][2] * A[2][0]) / detA;invA[1][2] = -(A[0][0] * A[1][2] - A[0][2] * A[1][0]) / detA;invA[2][0] = (A[1][0] * A[2][1] - A[1][1] * A[2][0]) / detA;invA[2][1] = -(A[0][0] * A[2][1] - A[0][1] * A[2][0]) /detA;invA[2][2] = (A[0][0] * A[1][1] - A[0][1] * A[1][0]) / detA;// 计算拟合的系数a、b和ca = invA[0][0] * B[0] + invA[0][1] * B[1] + invA[0][2] * B[2];b = invA[1][0] * B[0] + invA[1][1] * B[1] + invA[1][2] * B[2];c = invA[2][0] * B[0] + invA[2][1] * B[1] + invA[2][2] * B[2];}int main(){// 定义数据点的x和y值vector<double> x = {1.0, 2.0, 3.0, 4.0, 5.0};vector<double> y = {1.8, 2.9, 3.9, 5.1, 6.2};// 定义拟合的系数a、b和cdouble a, b, c;// 进行二次多项式拟合quadraticLeastSquaresFit(x, y, a, b, c);// 输出拟合结果cout << "拟合的二次多项式为:y = " << a << "x^2 + " << b << "x + " << c << endl;return 0;}此代码将给定的数据点进行二次多项式拟合,通过最小二乘法求解拟合的系数a、b和c,并输出拟合结果。
通过点 拟合三次多项式
通过点拟合三次多项式全文共四篇示例,供读者参考第一篇示例:通过点拟合三次多项式是一种常见的数学方法,用于求解一组给定点的最佳拟合曲线。
在现实生活中,这种方法被广泛应用于数据分析、图像处理、模式识别等领域。
在本文中,我们将详细介绍通过点拟合三次多项式的原理、方法和应用,并通过实例演示如何进行拟合。
一、原理通过点拟合三次多项式的核心思想是找到一个三次多项式函数,使得该函数与给定的一组点尽可能接近。
在数学上,一个三次多项式函数可以表示为:f(x) = ax^3 + bx^2 + cx + d其中a、b、c、d是待定系数,x是自变量。
通过给定的一组点(x1, y1), (x2, y2), ..., (xn, yn),我们可以建立一个方程组:f(x1) = a*x1^3 + b*x1^2 + c*x1 + d = y1f(x2) = a*x2^3 + b*x2^2 + c*x2 + d = y2...f(xn) = a*xn^3 + b*xn^2 + c*xn + d = yn通过求解这个方程组,我们可以得到最佳拟合的三次多项式函数。
二、方法在实际应用中,通过点拟合三次多项式通常使用最小二乘法来求解系数。
最小二乘法是一种数学优化方法,通过最小化残差的平方和来求解未知项。
对于通过点拟合三次多项式来说,最小二乘法的目标是最小化以下损失函数:L = Σ(yi - f(xi))^2其中Σ表示总和,yi是实际观测值,f(xi)是通过拟合曲线计算得到的值。
通过对损失函数求导并令导数为0,我们可以得到系数a、b、c、d的最优解。
三、应用通过点拟合三次多项式在实际应用中有着广泛的应用。
在图像处理中,我们可以利用该方法对曲线进行拟合,从而实现曲线的平滑处理和特征提取。
在数据分析领域,通过点拟合三次多项式可以帮助分析师找到数据之间的关联性,进而作出合理的预测和决策。
下面我们通过一个实例来演示如何通过点拟合三次多项式:假设我们有以下一组点:(-2, 2), (-1, 1), (0, 0), (1, 1), (2, 2),我们需要通过这些点拟合出一条最佳曲线。
数据拟合试题及答案
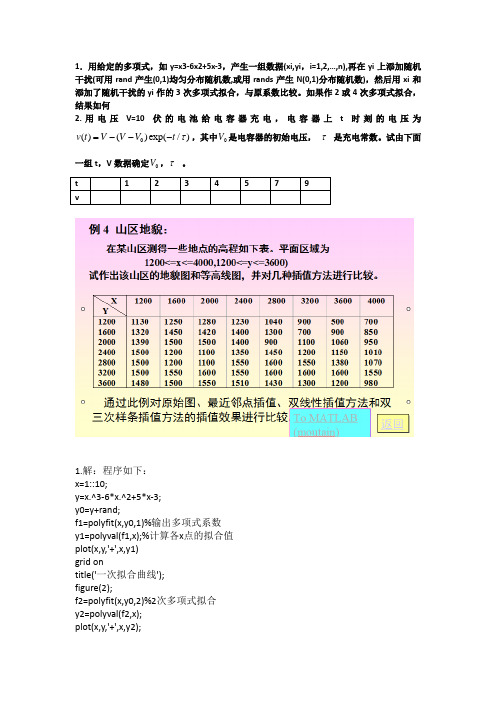
1.用给定的多项式,如y=x3-6x2+5x-3,产生一组数据(xi,yi ,i=1,2,…,n),再在yi 上添加随机干扰(可用rand 产生(0,1)均匀分布随机数,或用rands 产生N(0,1)分布随机数),然后用xi 和添加了随机干扰的yi 作的3次多项式拟合,与原系数比较。
如果作2或4次多项式拟合,结果如何2.用电压V=10伏的电池给电容器充电,电容器上t 时刻的电压为 0()()exp(/)v t V V V t τ=---,其中0V 是电容器的初始电压, τ 是充电常数。
试由下面一组t ,V 数据确定0V ,τ 。
t1 2 3 4 5 7 9 v1.解:程序如下:x=1::10;y=x.^3-6*x.^2+5*x-3;y0=y+rand;f1=polyfit(x,y0,1)%输出多项式系数y1=polyval(f1,x);%计算各x 点的拟合值plot(x,y,'+',x,y1)grid ontitle('一次拟合曲线');figure(2);f2=polyfit(x,y0,2)%2次多项式拟合y2=polyval(f2,x);plot(x,y,'+',x,y2);grid ontitle('二次拟合曲线');figure(3);f4=polyfit(x,y0,4)%4次多项式拟合y3=polyval(f4,x);plot(x,y,'+',x,y3)grid ontitle('四次拟合曲线');figure(4);f6=polyfit(x,y0,6)%6次多项式拟合y4=polyval(f6,x);plot(x,y,'+',x,y4)grid ontitle('六次拟合曲线');运行结果如下:依次为各个拟合曲线的系数(按降幂排列)f1 =f2 =f4 =f6 =运行后,比较拟合后多项式和原式的系数,发现四次多项式系数与原系数比较接近,四次多项式的四次项系数很小。