半导体制冷式电子冰箱的高精度温度控制电路
半导体电冰箱工作原理

半导体电冰箱工作原理一、半导体制冷原理半导体制冷,也称为热电制冷或温差电制冷,是基于帕尔帖效应的一种制冷技术。
帕尔帖效应是法国物理学家帕尔帖在1834年发现的,当电流通过不同导体组成的回路时,除产生焦耳热外,在不同导体的接头处,根据异质结的温差和电流方向,会产生吸热或放热现象,从而实现制冷或制热的效果。
二、Peltier效应Peltier效应是半导体制冷技术中的核心原理,当直流电通过由两种不同导体的接头组成的电路时,由于帕尔帖效应,在接头处会产生吸热或放热现象。
通过改变电流方向,可以实现在同一部位产生热量交换,从而达到制冷或制热的目的。
三、半导体热电转换半导体热电转换是半导体制冷技术的关键过程,通过利用半导体材料的热电效应实现热能与电能之间的相互转换。
当温度梯度存在于半导体材料中时,由于塞贝克效应或皮尔兹效应,会在材料中产生电压或电流,从而实现热能转换为电能。
四、制冷循环原理半导体电冰箱的制冷循环包括吸热、放热和散热三个过程。
在吸热过程中,通过半导体制冷片吸收冰箱内部的热量;在放热过程中,将吸收的热量传递到冰箱外部;在散热过程中,通过通风或散热器将热量散发到环境中。
五、温度控制原理半导体电冰箱的温度控制主要通过调节电流大小来控制半导体制冷片的制冷效果,从而实现冰箱内部温度的调节。
温度传感器检测冰箱内的温度,控制器根据设定的温度与实际温度的差异,调节电流大小,从而控制半导体制冷片的制冷效果,以保持冰箱内的温度恒定。
六、制冷效率与能耗半导体电冰箱的制冷效率与能耗与其采用的半导体材料、制冷片的设计和制作工艺、散热方式等因素有关。
高效的散热系统和合理的控制策略可以提高制冷效率并降低能耗。
相对于传统压缩式冰箱,半导体电冰箱具有较高的能效比(COP)和较小的体积,但制造成本较高。
七、系统集成与优化为了实现高效的制冷效果和稳定的运行状态,需要对半导体电冰箱的各个系统进行集成和优化。
这包括合理的散热设计、高效的热交换器、稳定的电源供应、精确的温度控制等。
半导体制冷片加热制冷换向电路的设计

半导体制冷片加热制冷换向电路的设计近年来,随着物联网技术的发展,各个领域对于温度的精准控制越来越重要。
其中,半导体制冷技术在物联网温度控制领域有广泛的应用,能够利用温度对半导体基本电导率的影响来实现制冷和加热的功能。
本文主要介绍半导体制冷片加热制冷换向电路的设计。
一、半导体制冷半导体制冷是一种利用半导体热电效应进行制冷的技术。
在具有热电材料的半导体芯片中,有一半的电子被加热并获得了更高的能量,从而跃迁到导带。
这些电子在导带中自由行动,造成导电;而另外一半的电子由于能量不足而停留在价带中。
由于半导体的导电能力取决于其温度,当半导体芯片的一侧被加热时,该侧的温度上升,导致其导电性能的变化,从而在芯片内建立起电势差。
这个电势差会将热量由加热一侧输送到另一侧,从而实现了制冷的效果。
二、半导体制冷片加热制冷换向电路半导体制冷片加热制冷换向电路是指一种能够实现制冷和加热的电路。
半导体制冷芯片中通常有两侧,其中一侧被加热用于制冷,而另一侧则被冷却用于制热。
在实际应用中,需要根据实际需求对加热和制冷进行调整,因此需要设计一种能够实现加热和制冷之间的切换的电路。
该电路需要能够控制半导体制冷片芯片的加热和制冷,使其能够根据实际需求进行切换。
三、电路设计3.1 电路原理半导体制冷片加热制冷换向电路的原理如下:当需要制冷时,会将电流通过制冷一侧,这会导致半导体芯片中的一个一侧变冷,另一个侧变热,从而实现制冷的效果;当需要加热时,则会将电流通过加热一侧,这会导致半导体芯片中的一个一侧变热,另一个侧变冷,从而实现加热的效果。
3.2 电路设计步骤(1)电源设计首先,需要确定半导体芯片的工作电压,以及设计一种合适的电源,保证电流的稳定和可控性。
一般来说,可以通过变压器、整流器和稳压器的组合来实现电源设计。
(2)半导体芯片驱动电路的设计半导体芯片驱动电路需要通过与之匹配的电压来控制半导体芯片的电流。
因此,需要设计一种与半导体芯片匹配的驱动电路。
基于Codex—MO的半导体制冷温度控制系统设计

的 闭 环 控 制 . 实 现 测 试 腔温度 快速 、 稳 定 地 变 化 。 恒 温 系 统 部 分 软 件 流 程
图 如 图 3所 示 。
4 2 自 整 定 Pl . D
算 法
P D 控 制 器 是 l
32温 度 检 测 模 块 _
本 设 计 采 用 D 1 B 0作 为 温 度 检 测 元 件 。 D I B 0 S8 2 S 8 2 是由D LA A L S公 司 生 产 的 一 款 温 度 传 感 器 芯 片 ,体 积 小 、RM 公 司于 2 O 0l 初 推 出 了 Co e — 9年 d x M0内 核 处 理 器 。
度 设 定 值 .对 半 导 体 制 冷 器 和 加 热 器 进 行 输 出控 制 ,调 节 测 试 腔 内温 度 。 在 温 度 调 整 的过 程 中 ,MC ( 控 制 器 ) U 微 根 据 温 度 传 感 器 传 输 的 数 据 。 控 制 输
( D) 进 行 控 制 的 调
节 器 。 比 例 控 制 能
快 速 反 映 误 差 , 积 分 控 制 可 以 消 除 误 差 .微 分 控 制 可 以
33温 度 控 制 模 块 .
本 设 计 选 用 的 半 导 体 制 冷 器 型 号 为 T C — 2 0 。 在 E 1 17 6 热 端 温 度 为 2 ℃ 的 情 况 下 .T C — 2 0 7 E 1 1 7 6的最 大 T作 电 流 为 6 A,最 大 工 作 电压 为 1 .V,最 大 制 冷 功 率 为 5 W ,冷 54 4 热 端 最 大 温 差 为 6 ℃ 。半 导 体 制 冷 器 采 用 H 桥 电路 驱 动 , 8
技 术
便 于 控 制 电 流 大小 及 流 向。 本 设计 用 采
基于半导体制冷器的激光器温度控制系统
VO1 .31 NO. 3
Jn 2 1 u.00
基 于 半 导 体 制 冷 器 的激 光 器 温 度 控 制 系统
王博 钰 , 贾文超
( 春 工 业 大 学 电气 与 电 子 工 程 学 院 ,吉 林 长 春 1 0 1 ) 长 30 2
摘 要 :采用 NT C作 为温 度传 感器 进行 温度 采 集 , 利用 P WM 脉 宽调 制技 术及 P D补 偿算 法 I 实现 温度 调 节 , 导体 制冷器 作 为控 制终 端 控制 激光器 温 度 。经过 实验 测 试 , 激 光器 温度 保 半 使
激光 器温 度 检测 电路 主要 完成 对激 光器 温 度
的作 者 简 介 :王 博 钰 ( 9 1 ) 男 , 族 , 林 吉 林 人 , 春 工 业 大 学 硕 士 研 究 生 , 要 从 事 数 字 化 检 测 技 术 方 向 研 究 , — i: 18 一 , 汉 吉 长 主 Ema l wa g o u c s.d .n *联 系 人 : 文 超 ( 9 5 ) 男 , 族 , 林 松 原 人 , 春 工 业 大 学 教 授 , 士 , n b y @ u teu c . 贾 16一 , 汉 吉 长 博 主要 从 事 电气 工 程 、 达 、 拟 仪 器 等 方 向研 究 , - ij wec a @ ma .c te u a . 雷 虚 E mal i n h o :a i cu. d .n l
Abs r c :As t e e ta t h t mpe a u e e s r,NTC s us d t s mpl he t m pe a ur . The t mpe a ur s r t r s n o i e o a et e rt e e r t e i
基于可控硅移相控制的高精度半导体制冷温控系统
i . ℃ . a o d pop cs s0 1 h sg o rs e t.
Ke r s s mio d co erg rt r t mp r t r e e t n t y itr p a e t mp r t r o t l y wo d : e c n u trr f e ao ;e e au e d t ci ;h rs h s ; i o o e e au e c n r o
FAN n- a , E n— a Ha b i XI Ha hu
( e at n fEeto i a dC mmu i t nE g er g Not hn l ti P we iesy, adn 70 3 C ia D p rme t lcrnc n o o nci n i ei , rhC iaEe r o rUnvri B o ig0 10 , hn ) ao n n c c t
201 焦 2
仪 表 技 术 与 传 感 器
I sr me t Te h i u a d S n o n tu n c nq e n e sr
2 2 01
第 5期
N . o5
基 于可 控 硅移 相 控 制 的 高精 度 半 导体 制冷 温控 系统
范寒 柏 , 汉 华 谢
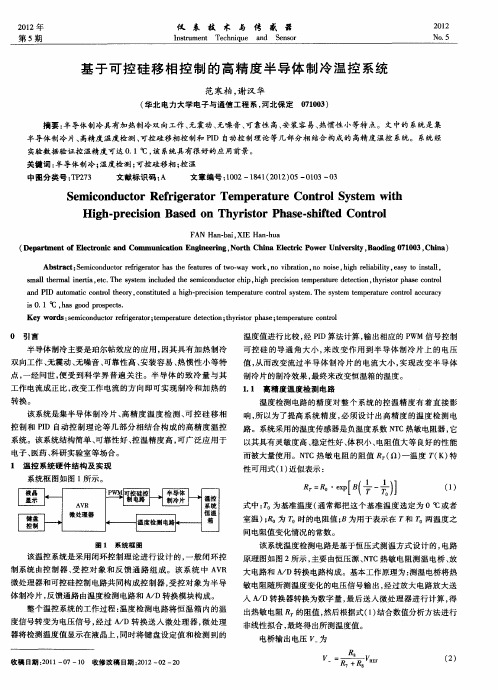
半 导体制冷主要是珀 尔帖效应 的应 用 , 因其具有 加热制 冷 双 向工 作 、 无震 动、 无噪音 、 可靠性高 、 安装 容易 、 热惯 性小 等特
点, 一经 问世 , 便受 到科 学界 普遍关 注 。半 导体 的致 冷 量与其 工作 电流成 正 比, 改变工作电流 的方 向即可实 现制冷 和加热 的
0 引 言
温度值进行 比较 , PD算法计算 , 出相应的 P 经 I 输 WM信号控制 可控 硅 的导通 角 大小 , 改变 作用 到半 导体 制冷 片上 的电压 来 值 , 而改变流过半 导体 制冷 片的 电流大小 , 从 实现 改变半 导体
基于半导体制冷原理的小型高精度恒温控制器研究
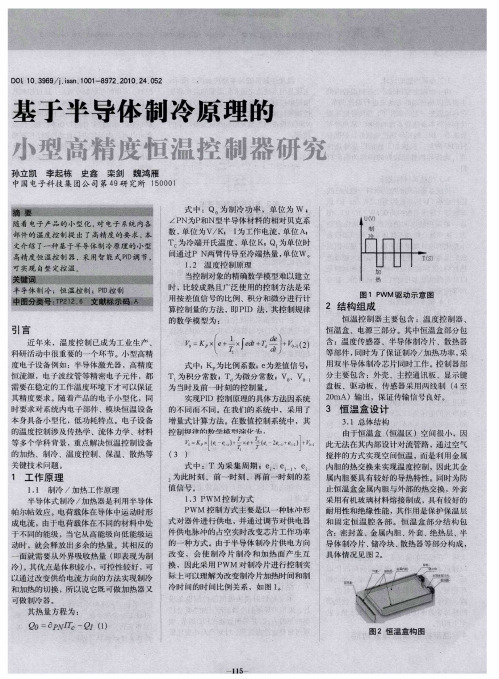
恒温盒制冷器的散热器采用热管导热
式 散 热 器 , 用 这 种 类 型 是 为 了有 效 提 高 采
散热器的散热效率 ,同时可以减小散热器
体积。 热 管工作 原理 是利 用 中空 的 圆柱形 管 ,热 管 两端 产 生 温 差 的 时 候 ,蒸 发端 的 液体就会迅速气化 ,将热量带 向冷凝端 , 速度非 常快 。两端温差越大 ,蒸发速度越
3 3绝热层材料选择 . 传 统温 箱 采 用 的绝 热 材 料 一般 为 硅 酸
铝纤维棉 ( 热系数约为0 2 / ・ 或 导 .W m k) 苯板 等 ( 热 系数 约 为 0 4 / - ,但 导 .W m k)
是一般 采用较 厚的绝 热 层来保证 保温 能 力, 这样就会增加 系统体积 ,与恒温设备 小型化的设计要求相矛盾。为 了提高恒温 盒的保温性能 , 绝热 层采用微纳米超级绝 热材料 ( 又称超级绝热材料 ) 这种材料 是 。 以硅质微纳米 多孔 材料 、无机纤维 、黏合 剂等纯无机材料组 合而成 。 34 制冷 片的设计 .
帕 尔帖 效应 。电荷载体 在导体中运动时形 成 电流 ,由于 电荷载体在 不同的材料 中处 于 不同的能 级 ,当它从高 能级向低能级运 动 时 ,就 会 释 放 出 多余 的 热 量 。其 相 反 的
一
1 3P M 控 制 方 式 . W P M 控 制 方 式 主 要 是 以 一 种 脉 冲 形 W 式 对 器 件 进 行供 电 , 通 过 调 节 对 供 电 器 并
12 温 度 控 制 原 理 .
I Vj I
铡
门n厂 蚺 ]
一
高精 度 恒 温控 制 器 ,采 用智 能 式 P 调 节 , I D 可 实 现 自整 定控 温 。
半导体制冷器TEC的驱动与控制 (一)
半导体制冷器TEC的驱动与控制 (一)半导体制冷器TEC(Thermo-Electric Cooler)是一种利用Peltier效应产生制冷的器件,其主要应用于微电子、激光器、传感器等领域的温度控制。
TEC驱动与控制一直是半导体电子学领域的研究热点之一。
一、TEC驱动方式TEC的驱动方式分为两种:恒定电流驱动和恒定电压驱动。
其中,恒定电流驱动是指在TEC两端加上一个恒定电流,使其产生的热量与冷量相等,达到匀速制冷的效果;恒定电压驱动则是在TEC两端加上一个恒定电压,使其产生的冷量和热量成一定比例,达到不同的温度控制效果。
二、TEC控制方法TEC的控制方法主要分为三类:PID控制、H∞控制和模型预测控制。
其中,PID控制是目前最常用的一种控制方法,其基本原理是通过比较目标温度值与实际温度值之间的偏差,计算出一个控制量,再通过PID 算法进行控制,使温度达到稳定状态。
三、TEC控制参数TEC控制参数包括:电流、电压、温度、功率和效率。
其中,电流和电压的控制可以实现恒定电流和恒定电压的控制方式;温度的控制需要采集温度传感器数据并进行反馈控制;功率和效率则需要根据TEC的工作状态和应用环境来进行动态调整。
四、TEC驱动与控制电路TEC驱动与控制电路主要包括三个部分:TEC驱动模块、温度采集模块以及控制模块。
其中,TEC驱动模块主要实现对TEC的驱动,而温度采集模块则用来采集温度传感器的数据,控制模块则实现了对TEC的PID 控制功能。
五、TEC控制软件TEC控制软件可以实现对TEC的控制参数设置、PID参数调整、温度采集和数据分析等一系列功能。
此外,软件还可以根据用户的需求,实现定时控制、手动控制和自动控制等功能,为用户操作提供更加便利的选择。
总之,TEC驱动与控制是半导体电子学领域的研究热点,通过对TEC控制参数的实时调整,可以使TEC达到最佳的制冷效果,为半导体行业和生产领域提供更好的温度控制解决方案。
半导体制冷片 电路
半导体制冷片电路
半导体制冷片电路是一种基于Peltier效应的热电制冷技术。
其主要原理是利用半导体材料,通过电流在两个不同的材料接触点产生的热电效应来实现制冷。
半导体制冷片电路的核心部件是Peltier芯片,它由多个热电偶连接而成。
当电流流经芯片时,热电偶的热电效应会使一侧变冷,另一侧则变热。
通过合理的设计,可以实现制冷或制热效果。
与传统的制冷方式相比,半导体制冷片电路具有体积小、重量轻、可靠性高、噪音小、无污染等优点。
它被广泛应用于电子设备、航空航天、军事、医疗、汽车和家用电器等领域。
半导体制冷片电路的设计和制作需要掌握一定的电子技术和材
料科学知识。
在设计时,需要考虑模块的制冷量和功率、电源和控制电路的设计、散热和温度控制等问题。
在制作时,需要选用高品质的半导体材料和热电偶,进行精密的加工和封装。
未来,随着科技的不断进步,半导体制冷片电路将继续发展壮大,成为新一代高效节能的制冷技术。
- 1 -。
基于半导体制冷器件的新型温度控制系统
系统采用 2 L D显示 。 位 E 设置 3 个按键 。 WM1 P 半导体制冷片的优点 , 是没有滑动部件 , 可以应 实 现加热 , 冷功率控制 ,WM 实 现风扇 转 速控 制 P 2 用在一些空 间受到限制 、 可靠性要求高 、 无制冷剂污 制 。电流方向控制信号控制 电流方 向, 从而改变系统 染 的场合嘲 。利用半导体材料的帕尔帖效应 , 当直流 的加热 、 制冷模式 。控制信号控制后续输出 , 为高 电 电通过两种不 同半导体材料 串联成的电偶 时,在 电 平 时其他控制信号有效。
E u p n n fern e h oo y No 1 2 1 q i me t Ma ua t g T c n l g . , 0 2 i
基 于半导体 制冷器 件 的新型温度控制 系统
伍彩云 ’野 莹莹 ’刘 新 2 , 。
(. 1沈阳理工大学 信息科学与工程学院, 辽宁 沈 阳 106 ; 1 18 2 沈阳东软飞利浦数字 医疗设备有限公司 , . 辽宁 沈阳 10 1 ) 10 5
导体制冷的方式 , 来解决 的实际系统的散热问题 , 具 P 10型热电阻 。也可 以直接连接 D 1B 0 T0 S 8 2 型数字 有很高的实用价值 。 温度传感器嗍 。 设 计 利 用 了 PC 6 87内部 的 2个 1 I 1F 7 O位 的
2 温度控制 系统
P WM波发生器 , 可以对输 出的 P WM波进行 1 1 0 , 0 0
偶 的两端即可分别 吸收热量和放出热量 ,可 以实现
针对 目前常见 的温度传感器存 在的不足 ,系统 加热 、制冷的 目的。它是一种产生负热阻的制冷技 充分利用 了 PC 6 87的内部 AD资源 ,可 以进行 I1F 7 / 术, 其特点是无运动部件 , 可靠性也比较高[ 利用半 模拟信号的采集 ,支持连接 A 5 0 3 ] 。 D 9 型温度传感器和
基于半导体制冷片的温度控制系统的设计
基于半导体制冷片的温度控制系统的设计摘要:设计一种用于红外传感器工作温度调节控制的模块,使红外传感器在低温下工作,以提高红外传感器的探测性能。
通过以mega16芯片为核心,以半导体制冷片为制冷元件,以PID算法为基础构建了一套半导体温度调节系统[1]。
实验结果表明,半导体制冷温度控制系统能够为红外探测器提供所需的工作温度。
关键词:温度半导体制冷片PID算法温度对红外传感器有比较大的影响,当外界环境温度发生变化时,红外传感器对所测量的物理量会有较大的变动,影响其测量值的准确性[2],产生较大的外界噪声干扰,所以当进行精确测量时,将红外传感器控制在一个恒定的温度下,可以大大提高探测精度,减少误差。
1 半导体制冷器的工作原理半导体制冷也称热电制冷,是一门介于制冷技术和半导体技术边缘的学科,半导体制冷是以温差电现象为基础制冷方法,利用帕尔贴效应的原理达到制冷目的。
帕尔帖效应:当电流I通过由两种不同材料组合成的闭合回路时,在材料的接头处一端会吸收热量Qp,另一端会放出热量Qp。
这种吸收或放出的热量叫做帕尔帖热,其吸热或放热由电流的方向决定,大小由公式决定。
π为帕尔帖系数,与温差电动势率有关,为组成回路两种材料的温差电动势率,T为相关接头的温度。
作为一种制冷源,半导体冷片可连续工作,不需要制冷剂,没有污染源和机械运动部件,不会产生回转效应,是一种固体元件,工作时没有噪音、震动、寿命长,安装容易。
半导体制冷片是电流换能型器件,通过控制输入电流,可实现高精度的温度控制。
热惯性小,制冷制热时间比较快,在热端散热良好冷端空载的情况下,可迅速达到最大温差。
2 温度控制系统的组成半导体温度控制系统结构框图如图1,由制冷片引起的温度变化经温度传感器传送给控制器,与设定的温度进行比较,所得的信号偏差通过PID进行调整处理,由控制器发出命令信号,通过驱动电路驱动半导体制冷片进行制热或者制冷,以达到红外传感器的工作温度环境。
3 硬件系统设计本控制系统主控单元采用的是ATMEL公司A VR系列的Atmega16单片机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
朴充墩失舸热量。同样,;制冷温度过低
时.热敏电阻阻值变太.桥路输出一个相 反的电压驱动制睁器发热。m子琳箱冷藏 室所需温度通过温度设置自路设置(目廿
常的J:怍状态下.HD控舳路中超±要作
用的是M倒自路;积分%瞎在PID&d自路 中,起着对辅出自琏信号缓慢Ⅷ节、变化 的作用;微分电路对于齄^电E突然出现 的较太%冲变化才起作月.}时通常不起 作用。根据Ziegler
…蓖
c‘,n。日邮‘ce*m椭目
81
能Ⅻn。目j星一个半导体制☆器的弗型结
构两片陶瓷片之间夹有许多互相排列■ 成的N型目P型半导体瓤袍,自NP之Ⅻ以 制铝或其他金属§体空!}帽莲。接∞直
的一端良好接触.此端丽称∞控温面。g
一端作为哉热或&热面,置于散热片上,
t上惭低1椎时伽持器M黼温整。
万 方数据
刚即可)。
采用M较式温度{空制方法霎现高精度 温度控制在宴验中E证霉很难协调控温系 统的静态精度和动态稳定性的一致性。为 T解决韫度控制系统的动态稳定性与静老 精度之间的矛盾,本文采用比例(P)一积 分(【) 微o(D)控制嚣来盘现高精攫
NichaI螺验公式洁所计
T_27
算出日驴ID参数K间6d
T。068选择
44风机迸R噪声拄目措施 对于风冷电冰箱.风机运行的噪声 米澡有两个方面,其一是风扇运转通过风 道系统流动的空气传递到箱体而产生的噪 声;其二是风机安装通过直撑如砥饥橡腔 垫传逮黔穑体的振动而产生的罅声。前者 主型是爵Ⅸ颇的谐渡声,可通过风挎系统 的优化逝计如台理降低%机转遗、加大扇 叶d径、接近风机尉叶正面处设计冷气出
的输出值;V{0为控制信号量。
PI啪制原理如图d新示.P嘴制*把
设定值S5受控系统的受控嚣的寓断Ⅲy…
桐减.得到7一个龊差■d”.4差量elt烃
&倒,积分、微分运算后通过线性的组台 而得自受控系统的控制输入ivitl.宴现对 受控系统进行自动控制的目的.它是一种
线性目ib'H。
减小,制挎器制冷随之而减小.R曲阻值也
d■黼‘∞E&^∞IE《月)“日■辙{m《
【编辑:掌辨l
3l优化曾黯设计:在产品设计阶
段.建立管路的振动槿型进行分析与计
攀雾裕鳓淹冀咆蒂臻籀的 高精度温度控制电路
南海自^*#日&《月廖R华唐老目 近儿年,半导体制辟式电7冰精& 口越¥mg.mⅢ货现象m4Ⅻ增多. 辟±垫原因是采用半导体M冷∞的产品 制净能力的不稳定。本文FⅫ舟绍一种 针对半导体制冷式m子冰箱时高精度温 Ⅱ控M自路。 ¥目体制冷嚣叉称热电制H器.它是 利用特种材料组成P-N绗,提供直流电就 锍自糠后.自}H自氍【】出挺,甫先经过 P艰半导体.枉此I脚比热埘.到了N!半导 体.R将热叠艘出,每经过一十NP精组 就商热量l}f一边艘诺到另丹一边.造成温 差,从■形成冷热端。改变制n器的供电 电压.可以宴现制冷量的连续词节;改变 电根供自方向.可以从制冷转为供热。一 般将屯子冰箱的将藏窜同定在导热性能& 好的盒届俦热扳±.井将传热板与制冷韶 由于半导镕制冷嚣的t作{孝‘生,其翩蹲 能力受其冷热端温差影响较大.也寄易受同 囤环境影响而不稳定。∞自十冰箱的工作温 度稳定控制更加注重昕控制温度点的稳定范 国而不太*RT&制温度自寸缝f#竖化.】耋样
市矿夕
伊。 卵瓣∥Z
玲喊室与外界的热交换。葑
【编辑李鹏J
∥强
。纛嚣蠢端。
《■:
⑧⑧翁
熊熟l黑
h1]lih计:罂唾葛rj片轰二}埘|:i,磐
万 方数据
■-Ⅱ…t一ⅢⅡ一{{一一ml—z_Ⅲ
半导体制冷式电子冰箱的高精度温度控制电路
作者: 作者单位: 刊名: 英文刊名: 年,卷(期): 廖民华, 唐念恩 南海出入境检验检疫局 家电科技 HOUSEHOLD APPLIANCE TECHNOLOGY 2009(19)
T础掣I论文-论述
就自设”温度控制电存带来方便,也为设 ”高精度的温度控铷电路带采7可能。
如图3所示.世目放大电路的输八端是
数低,而睁态时放大系数高,用而解决7 精度与稳定性之目的矛盾.提商了控44质 日,其控制原理主要星按mⅨ荤信号的比 例、积分和微分值计算相&控制量,井将 其作为输^置传a14控制g统■宴日自自 控制的.其控制模型为:
b@
p
县体地.比例屯路是使输出的变化 与偏差成比倒,即产生一个目定的增■ 鼙^.檄分自路是使精出与受控变量的 变化率成比例,积分自路是使输出的变 化率与偏差成比倒。在控制过程中.苗 先青一个超前量来抵消受控变量偏差给 定的值的变化+然后与积分时间戚&目 减小。但是由于被控变量仍然不在给定 值处,所“积分作用继续使输出变化速 率与积分时间成比倒。所青这些作用总 和将使艟控空量在一定时间内回复到结 定值.那么输出停止变化.并保持∞括 态。由于微分祀积分都是相继地控制一 个信号.罔月二者相互影响.积分作月 是使输Ⅲ产生一个变化速率.而微壬}作 用则对输出之变化速率产生匣作用。在 调试过程中.要根据Zieqler Nichols经 醢公i法听计算出的PID参数再采用凑试 法*当涸节参数.才目自得到皇好的控制 效果。 在比例、积分,搬分电路的共目作用
系统净噤的流动阻力与制冷系统的真空崖
最大的振动点处增加橡胶减强姥,以降低 振动噪声。应根据宴验的结果台理选用减
有着直接的关系。在家用电冰箱箭齿过程
中,在湖出R媒之前耍对制冷系统鞋行描 真空.当制冷系统的真空度达不到规定要 求时,冷煤茌制冷§统中流动就翳产生 “呼噜、呼噜 ”的%声。试验征明,
振培的重量、大小与安装位置。
一个电桥№路.热驶电阻R屿作为温度设
定的可变电疆组【由精密多目电位器厦拄一
定方式连接的固定电阻组组成.总阻值为 R4,改变缓日变电阻绢的阻值可在一定范 围内莲续I殳匠T月的工作温度)以殛两个阻
值固定的电阻(]okn)组成—个基本的目 桥平衡电路,Rl为负%度§数的热被自阻. 其%m随温度的碱小而增加。电路±要是
4-6dHAJ,取得7良好的艘粜。,f
●膏空■
I胂r#-措‘■目&■&《月辅'm#目《#l朔
2Em■lig‘■口∞*f屿■g'目*^{自*n I蛐
Ⅻ冷※堍在灌往降媒之前的的真空度应控
制在表Ⅱl抽m下。
43制≈管踌振动嘲i控制措捷
4
3*口g一*目■n☆*.※掷‘■目酬目目自
;卅)目∞I“晒n
nl∞
l蝴
利用电桥的}德¥控制半导体制挎块的工
砷)=‘{印)+:f水冲+嚣絮’{
其中K一为比例系数,T曲积分系数; T・为微分系数,e11)为强差信号量,e…
-S yRI.s为受控量的设定值;y Jl b为受控量
作,当R3-R5和R4-Rt时.电桥处于平衡,
仪器&太自路漫有翱m信号,半导体制冷 块不I作。厘之.当电侨不平衡时.电路 有靳&.制冷块并始工作。 桥路的两端分别接在位器艘丈器的日 个同掴输入端,两个反榴输八端则连接在 一起与第一缎运算故大器的输出端相连构 成反曲。电路接通后.热被电阻RI处于室 温.其阻值偏小,电桥不平衡,目口R3-R5, 但R4≯R【.这时电桥有输出.这个变化信 号将递过运算放大器进行比较放大.该电 压经过pID控制电路加到半孕体制冷块上, 半导体制冷块开始工作,随着温度的降 低,Rl的咀值不断增加.差动放大电&逐步
适当的电容、电阻分别组成比侧、积分和
微分电路,保证整个系筑勰定性,准确
性和快速嘀应。由上进自珐整定的参数一 般自日够镕Ⅻ控制的目的,但有时在控Ⅻ过 程中存在一些不如意的地自.如超Ⅷ置氆
温《控制。PID温度控制器实际上是种能 自动*节增益的故大器.动态时.艘大系
大,进^稳定区的时间过长篝。
万 方数据
算,确定营踣的主要振动挂态和振型.并
风口、优化风道系统的甜与验证等措施
进行墀声潞试与分析。根话计挥;弼试结
果对制冷系统曹酷进行优化设计.最大限 度搪少营路的振动以降低噪声。如一般售
辅低风崮运转与流动噪声。后者主要通
过合理进用材料.如支撑的厚度、强度、
断面形状等.便自机旋转声瘦额率避开电 冰蓿内产生共鸣声越的颊率,避免产生其 振.降f&咩声。
本文链接:/Periodical_jydqkj200919055.aspx
物理结梅。为获得最佳的热稳定性和待礴
的恒温.在宴际产品制作时.半导体制冷 嚣与自子冰箱降目室的备接触面都做到尽 量平滑{安装时.凉上少置导热硅脂.以 镕到蟊好的导热嫂果。作为愠度传感元件 的热被电阻除选用体积和热容尽量小外, 在形状£也应尽量与冷藏室劈贴台;茌机 械结构上与自子冰箱椅藏室安装在一起井 尽可能地靠近;此外.在降藉室机械结柯 的热学性能上.冷藏室应与外界环境稍以 良好绝热材抖以获得较好的热绝缘.减少
随之变化,直到%桥完全平衡.即R4・R1. R3-R5.制持器停m制拎为止。当然.由 干冷静室的绝热屠不能完全绝热,所以总 有一定的电流驱动半导体制泞器制冷.U 宴际的PID温睫控制电路如图5所示。 比例电路的输出端与反榴输^端之间通过 屯位器形成反馈.对上级屯路的输出电 压信号进行&倒放大。《a度控制%路通
路连接部分多采用u形管和异形管等方式并
进H台理的}嘱。
432采用碱振措施:减少管路振动的
肯嫂选径之一,是枢据实验寻找首路振幅
屉大时振动点.采用配重的原理.在振幅
5靖采疆 我们通过对家月电冰箱噪声源的分折 与降噪技术的研究,并战功应用到美菱公 司开发的产品中.其产品噪声值平均降低
423制造工艺控制:撕周幻.制冷
下.本文中的高辅度温度控翩自路实现7
对温度的HD两节控制,使温度控制自路在
i
l
i的衩
具体参数不大滑楚的情况下.通i廿ID词节
控制,有效地减少自路谩差.从Ⅻ提高7
^j的品
温度控制的精确度(】O孤K)。
≥然.影目撮度控制精度的目录育很 多。一个高精度的温度控材系统,不但取 挟于温度控制电路本身,也有赖于良好的