用matlab分析四杆机构
基于matlab的四杆机构运动分析
基于matlab的四杆机构运动分析一、四杆机构基本概念四杆机构是一种通过变换连杆长度,改变机构运动形态的机械系统。
四杆机构通常由固定连杆、推动连杆、连接杆和工作连杆四个连杆组成,其中固定连杆和推动连杆固定不动,连接杆和工作连杆则沿固定轴线的方向做平动或旋转运动。
四杆机构的基本构造如下图所示:四杆机构的四个连杆的长度和构造参数,以及驱动机构的运动决定了机构的运动特性。
在进行四杆机构运动分析时,需要通过求解运动学关系式和动力学方程,得到连杆的运动规律和力学特性。
二、四杆机构运动学分析1.运动学基本方程四杆机构的运动学分析基本方程是连杆长度变化的定理,即:l₁²+l₂²-2l₁l₂cosθ₂=l₃²+l₄²-2l₃l₄cosθ₄其中,l₁,l₂分别为固定连杆和推动连杆长度;l₃,l₄分别为连接杆和工作连杆长度;θ₂,θ₄分别为推动连杆和工作连杆的夹角。
2.运动学求解方法根据四杆机构运动学基本方程,可以求解机构中任意连杆的角度和位置,从而分析机构运动规律。
在matlab程序中,运动分析可以采用分析法或图解法。
分析法通常采用向量法或坐标法,即将四杆机构中各连杆和运动副的运动量表示为向量或坐标,然后根据连杆长度变化的定理,求解四个未知角度θ₁、θ₂、θ₃、θ₄。
图解法则先通过画图确定机构的运动规律,在图上求解连杆的角度。
比如可以采用伯格(Bourgeois)图法或恰普利恩(Chaplygin)图法等。
四杆机构动力学分析基本方程包括平衡方程和力平衡方程。
平衡方程:当四杆机构处于平衡状态时,连杆的受力关系可以表示为:ΣF=0其中ΣF为各连杆受力的合力。
ΣF=m×a其中,m为每个连杆的质量,a为连杆的加速度。
四杆机构动力学求解方法以matlab为工具,可借助matlab的求解器完成求解。
具体可以利用matlab的优化工具箱、控制工具箱和系统动态学工具箱等,来实现机构模型的动态模拟、仿真和优化设计。
应用MATLAB解决四杆机构角位移和角速度
应用MATLAB解决四杆机构角位移和角速度学院:班级:姓名:学号:题 干:已知曲柄摇杆机构的四杆长度为L1=304.8mm ,L2=101.6mm, L3=254.0mm,L4=177.8mm.曲柄角速度ω2=250rad/s,试用M 文件编写程序计算连杆3和摇杆4的角位移,3θ ,4θ,角速度3ω,4ω,并绘制出运动曲线。
机构如下图。
错误!未指定主题。
求解方法及公式:对于四杆机构存在如下公式:闭环矢量方程:4132r r r r +=+写成角位移方程的分量式:)cos()cos()cos()cos(44113322θθθθr r r r +=+)sin()sin()sin()sin(44113322θθθθr r r r +=+求解角位移方法利用牛顿---辛普森公式 将分量式写成如下形式:()0)sin()sin()sin()sin(,44113322432=--+=θθθθθθr r r r f⑴()0)cos()cos()cos()cos(,44113322431=--+=θθθθθθr r r r f从示意图可知杆1角位移恒为0,设曲柄2初始角位移为0。
对于连杆3,和摇杆4的角位移表示为预计值与微小修正因子之和。
表示如下:3'33θϑθ∆+= 4'44θϑθ∆+=将上式按泰勒级数展开,去掉高次项得到如下公式:()4'4'3413'4'331'4'31,θθθθθθθθθθ∆⨯∂∂+∆⨯∂∂+ff f =0()4'4'3423'4'332'4'32,θθθθθθθθθθ∆⨯∂∂+∆⨯∂∂+ff f =0 将上式写成矩阵形式:()'4'32,θθf'4'341'4'331,θθθθθθ∂∂∂∂f f 3θ∆ '3θ +=()'4'32,θθf'4'342'4'332,θθθθθθ∂∂∂∂f f 4θ∆ '4θ 利用矩阵求出连杆3和摇杆4的微小修正因子,将修正因子与预计值相加求出角位移,将求出的角位移带入⑴中,看是否满足函数值足够小。
四连杆机构运动学分析——张海涛
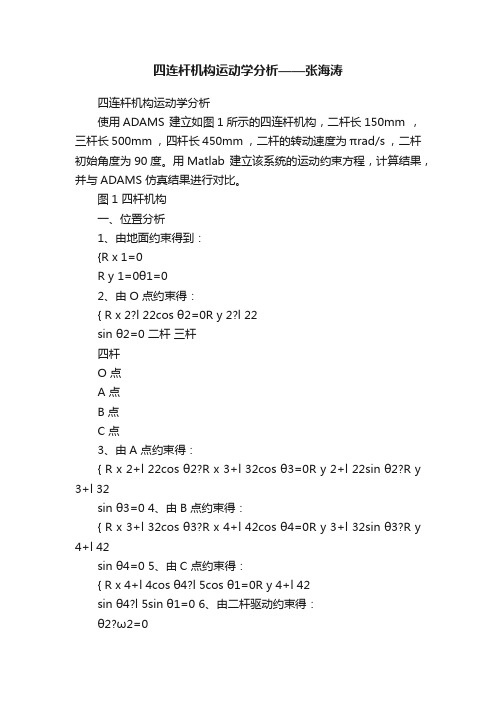
四连杆机构运动学分析——张海涛四连杆机构运动学分析使用ADAMS 建立如图1所示的四连杆机构,二杆长150mm ,三杆长500mm ,四杆长450mm ,二杆的转动速度为πrad/s ,二杆初始角度为90度。
用Matlab 建立该系统的运动约束方程,计算结果,并与ADAMS 仿真结果进行对比。
图1 四杆机构一、位置分析1、由地面约束得到:{R x 1=0R y 1=0θ1=02、由O 点约束得:{ R x 2?l 22cos θ2=0R y 2?l 22sin θ2=0 二杆三杆四杆O 点A 点B 点C 点3、由A 点约束得:{ R x 2+l 22cos θ2?R x 3+l 32cos θ3=0R y 2+l 22sin θ2?R y 3+l 32sin θ3=0 4、由B 点约束得:{ R x 3+l 32cos θ3?R x 4+l 42cos θ4=0R y 3+l 32sin θ3?R y 4+l 42sin θ4=0 5、由C 点约束得:{ R x 4+l 4cos θ4?l 5cos θ1=0R y 4+l 42sin θ4?l 5sin θ1=0 6、由二杆驱动约束得:θ2?ω2=0积分得:θ2?θ02?ω2t =0由上面九个方程组成此机构的运动约束方程,用Matlab 表示为:fx=@(x)([x(1);x(2);x(3);x(4)-l2/2*cos(x(6));x(5)-l2/2*sin(x(6));x(4)+l2/2*cos(x(6))-x(7)+l3/2*cos(x(9));x(5)+l2/2*sin(x(6))-x(8)+l3/2*sin(x(9));x(7)+l3/2*cos(x(9))-x(10)+l4/2*cos(x(12));x(8)+l3/2*sin(x(9))-x(11)+l4/2*sin(x(12));x(10)+l4/2*cos(x(12))-x(1)-l5;x(11)+l4/2*sin(x(12))-x(2);x(6)-w*i-zhj0;]);x(1) x(2) x(3) x(4) x(5) x(6) x(7) x(8) x(9) x(10) x(11) x(12)分别表示R x 1、R y 1、θ1、R x 2、R y 2、θ2、R x 3、R y 3、θ3、R x 4、R y 4、θ4。
基于MATLAB的四杆机构运动分析

石河子大学毕业设计(论文)题目:基于MATLAB的四杆机构运动分析与动画模拟系统院(系):机械电气工程学院专业:机械设计制造及其自动化学号: 2002071189姓名: 娄元建指导教师:葛建兵完成日期:二零零六年五月基于MATLAB的四杆机构运动分析与动画模拟系统[摘要] 本文介绍MATLAB开发机构运动分析和动画模拟系统的方法,并且利用MATLAB软件实现平面四杆机构的运动仿真。
以MATLAB程序设计语言为平台,将参数化设计与交互式相结合,设计出四杆机构仿真系统,能够实现四杆机构的参数化设计,并且能够进行机构的速度和加速度分析。
系统具有方便用户的良好界面,并给出界面设计程序,从而使机构分析更加方便、快捷、直观和形象,设计者只需输几参数就可得到仿真结果,为平面四杆机构的设计与分析提供一条便捷的途径。
[关键词] 机构;运动分析;动画模拟;仿真;参数化;MATLABAbstract:The kinematical analysis and animation method of the mechanism using MATLAB was discussed in the paper , and the kinematic simulation of planar four-bar mechanism with software MATLAB . And emulational system was developed , the system adopted Matlab as a design , It combined parametic design with interactive design and had good interface for user , that can realize parametic design of four-bar mechanism , also to make real speed and acceleration of mechanism 。
基于MATLAB的平面四连杆机构优化设计
基于 MATLAB 的四连杆机构的优化设计
陈伟斌
(汕头大学,工学院)
[摘要] 对平面四连杆机构进行数学建模,要求实现预期的传递函数运动轨迹。利用 MATLAB 强大的运算功能,快速精确地计 算出优化结果。再利用 MATLAB 编写程序检验得出的运动轨迹是否达到期望目标。 [关键词] 连杆、轨迹、优化设计、MATLAB。
Optimized design for four bar linkage mechanism of crushing machine based on MATLAB
Terry Chen (Shantou University, Engineering College)
[Abstract] Analyze the model of four bar linkage mechanism and try to satisfy the movement locus that we excepted. With the strong functions of MATLAB, we can calculate and get the best result quickly. Then write a program to simulate the movement locus of the output and examine whether it satisfy our requirement. [Key Words] Linkage, Movement locus , Optimized Design, MATLAB
l 2, l 3 两 个 独 立 变 量 。 设
l 2 x1; l 3 x 2; 可以得出本题是二维优化问题。
有志,有恒,有识,有为
基于MATLAB的平面四连杆机构运动仿真.
图2~4分别为θ4角速度、点C的速度变化曲线。
4结论
本文在复数向量坐标系中推导了四连杆机构运动方程,并应用MATLAB软件进行了连杆机构运动数值仿真。从计算结果可以看出,该方法可以方便快捷地得到连杆运动参数,能够有效提高分析效率和计算精度,可进一步推广到多连杆机构设计及优化计算中。
文章编号:1009-9492(201104-0051-02
引言
四连杆机构因其结构灵活、能够传递动力并有效地实现预定动作,在很多领域得到了广泛应用
[1]
。进行连杆机
构运动分析,传统方法主要是图解法或分析法[2]
,无论设
计精度还是设计效率都相对低下,无法满足现代机械高速高精度的要求。随着计算机技术的飞速发展,特别是以
面四杆机构[J ].机械制造, 2002,
(3:26-28.
[3]周进雄,张陵.机构动态仿真[M ].西安:西安交通大学出
版社, 2002.
[4]李娟玲,张建峰.基于C语言的平面连杆机构的运动分析
[J ].机械研究与应用, 2006, 19(5:117-120.
[5]宋兆基. MATLAB6.5在科学计算中的应用[M ].北京:清
华大学出版社, 2005.
[6]王正林.精通MATLAB科学计算[M ].北京:电子工业出
版社, 2009.
[7]曹惟庆.机构设计[M ].北京:机械工业出版社, 2004. [8]李洪涛,徐巍华.基于MATLAB软件对抽油机连杆运动规律
的仿真研究[J ].机械工程师, 2009(5:99-101.
参考文献:
[1]孙桓,陈作模.机械原理[M ].北京:高等教育出版社,
2006.
基于MATLAB的四连杆机构运动分析软件设计开题报告

基于MATLAB的四连杆机构运动分析软件设计开题报告云南农业大学本科生毕业设计开题报告工程技术学院车辆工程专业( 工科) 2008级设计题目:基于MATLAB的四连杆机构运动分析软件设计人机交互界面的设计云南农业大学教务处制2011年10月8日云南农业大学毕业设计开题报告1(本课题所涉及的问题在国内(外)的研究现状综述目前,MATLAB软件是功能强大的科学计算软件,被国内外高校和科研单位所使用。
尤其是基于矩阵运算的数据处理,还可用符号运算计算解析解;还可以实现数值分析、图像处理等若干个领域的计算和图形显示功能。
在工程技术界,MATLAB 也被用来解决一些实际课题和数学模型问题。
典型的应用包括数值计算、算法预设计与验证,以及一些特殊的矩阵计算应用,如自动控制理论、统计、数字信号处理(时间序列分拆)等。
平面连杆机构是一种应用十分广泛的机构。
对它的分析及设计一直是机构学研究的一个重要课题。
但传统方法对于常见的连杆机构的运动学、动力学分析仍然是非常繁琐,以至于很难对它进行深入的研究,如果建立一个连杆机构的仿真系统,使设计人员在进行设计时,从复杂的机构分析和烦琐的计算中摆脱出来,集中精力从事于创新工作,那将是很有意义的。
基于这样一种考虑,本课题尝试建立一个平面连杆机构的运动学仿真系统。
应用Matlab/Simulink对机构领域中应用广泛的基本机构——双曲柄机构、曲柄摇杆机构、曲柄滑块机构等的连杆点轨迹作仿真,该方法编程工作量小、轨迹图形显示便捷,所建模型只需作少量更改即可适应四杆机构的不同特征值,并可推广至多杆机构情况。
建立四杆机构的优化设计模型,用 MATLAB 优化工具箱实现四杆机构的优化设计及仿真,得到的优化结果有足够的精度,能满足设计需求,同时表明MATLAB 优化工具箱在四杆机构优化设计及其相关问题中具有较好的应用前景。
2(本人对课题提出的任务要求及实现预期目标的可行性分析由于连杆机构的性能受机构上繁多的几何参数的影响,呈复杂的非线性关系,无论从性能分析上还是性能综合上都是一个比较困难的工作。
基于Matlab/fsolve的工程四杆机构焊接杆F点的运动轨迹仿真

基于Matlab/fsolve的工程四杆机构焊接杆F点的运动轨迹仿真覃金昌;陈进武;王灿【摘要】设计了一种工程四杆机构,在对与连杆相垂直的焊接杆F点进行几何分析基础上,建立了F点的轨迹分析数学模型,并应用Matlab/fsolve对其进行编程,求得模型的数值解。
利用Matlab的可视化功能绘制了F点的轨迹图、角位移图和F点长度变化图,得到了当原动件匀速转动一周时焊接杆上F点的轨迹、角位移变化规律。
【期刊名称】《技术与市场》【年(卷),期】2013(000)009【总页数】3页(P16-18)【关键词】工程四杆机构;fsolve;轨迹仿真【作者】覃金昌;陈进武;王灿【作者单位】桂林航天工业学院机械工程系,广西桂林 541004;桂林航天工业学院机械工程系,广西桂林 541004;桂林航天工业学院机械工程系,广西桂林541004【正文语种】中文0 引言四杆机构因能够传递动力和能实现多种运动形式,而且结构简洁灵活,成为了工程上广泛应用的典型传动机构,其运动分析是机构学领域中的典型。
传统的机构运动分析方法有实验综合法、图解法和解析法三种。
尽管这三种方法都有各自的优点,但是缺点也相当大,尤其是对现代高精度机构设计等方面缺点非常明显。
随着计算机技术在工程设计应用的发展,解析法得到了转机,获得了广泛的发展空间。
Matlab(Matrix Laboratory,矩阵实验室)是美国Mathworks公司在20世纪80年代中期推出的,经过功能的改进、扩展和强化,目前已是国际上公认的最优秀的交互式矩阵计算分析软件之一。
其具有强大的运算分析功能,集科学计算、程序设计及可视化于一体的高度集成软件环境,并成功地广泛应用于机械优化设计、自动控制、信号处理、工程力学等领域。
对于机构优化建模一般都会涉及三角函数、指数等形式的超越方程,而超越方程一般没有解析解,只有数值解惑近似解。
尽管求解超越方程的近似解方法很多,图像法虽然形象,但得到的解误差太大,而Matlab的fsolve函数能够很好地解决多元方程求解问题,现实多次迭代,有效控制解的残差,且精度很高,计算速度快。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
首先创建函数FoutBarPosition,函数fsolve通过他确定。
function t=fourbarposition(th,th2,L2,L3,L4,L1)t=[L2*cos(th2)+L3*cos(th(1))-L4*cos(th(2))-L1;…L2*sin(th2)+L3*sin(th(1))-L4*sin(th(2))];主程序如下:disp '* ** *** 平面四杆机构的运动分析*** ***'L1=304.8;L2=101.6;L3=254.0;L4=177.8;%给定已知量,各杆长L1,L2,L3,L4th2=[0:1/6:2]*pi; %曲柄输入角度从0至360度,步长为pi/6th34=zeros(length(th2),2); %建立一个N行2列的零矩阵,第一列存放options=optimset('display','off'); %θ_3,第二列存放θ_3for m=1:length(th2) %建立for循环,求解θ_3,θ_4th34(m,:)=fsolve('fourbarposition',[1 1],…%调用fsove函数求解关于θ_3,θ_4options,th2(m),L2,L3,L4,L1); %的非线性超越方程,结果保存在th34中endy=L2*sin(th2)+L3*sin(th34(:,1)');%连杆3的D端点Y坐标值x=L2*cos(th2)+L3*cos(th34(:,1)');%连杆3的D端点X坐标值xx=[L2*cos(th2)]; %连杆3的C端点X坐标值yy=[L2*sin(th2)]; %连杆3的C端点Y坐标值figure(1)plot([x;xx],[y;yy],'k',[0 L1],[0 0],…%绘制连杆3的几个位置点'k--^',x,y,'ko',xx,yy,'ks')title('连杆3的几个位置点')xlabel('水平方向')ylabel('垂直方向')axis equal %XY坐标均衡th2=[0:2/72:2]*pi; %重新细分曲柄输入角度θ_2,步长为5度th34=zeros(length(th2),2);options=optimset('display','off');form=1:length(th2)th34(m,:)=fsolve('fourbarposition',[1 1],…options,th2(m),L2,L3,L4,L1);endfigure(2)plot(th2*180/pi,th34(:,1),th2*180/pi,th34(:,2)) %绘制连杆3的角位移关于曲柄2的角位移图plot(th2*180/pi,th34(:,1)*180/pi,…th2*180/pi,th34(:,2)*180/pi)%绘制摇杆4的角位移关于曲柄2的角位移图axis([0360 0170])%确定XY边界值grid %图形加网格xlabel('主动件转角\theta_2(度)')ylabel('从动件角位移(度)')title('角位移线图')text(120,120,'摇杆4角位移')text(150,40,'连杆3角位移')w2=250; %设定曲柄角速度for i=1:length(th2)A=[-L3*sin(th34(i,1))L4*sin(th34(i,2));…L3*cos(th34(i,1)) -L4*cos(th34(i,2))];B=[w2*L2*sin(th2(i));-w2*L2*cos(th2(i))];w=inv(A)*B;w3(i)=w(1);w4(i)=w(2);endfigure(3)plot(th2*180/pi,w3,th2*180/pi,w4); %绘制角速度线图axis([0 360 -175200])text(50,160,'摇杆4角速度(\omega_4)')text(220,130,'连杆3角速度(\omega_3)')gridxlabel('主动件转角\theta_2(度)')ylabel('从动件角速度(rad\cdot s^{-1})')title('角速度线图')for i=1:length(th2)C=[-L3*sin(th34(i,1)) L4*sin(th34(i,2));…L3*cos(th34(i,1))-L4*cos(th34(i,2))];D=[w2^2*L2*cos(th2(i))+w3(i)^2*L3*cos(th34(i,1))-w4(i)^2*L4*cos(th34(i,2));...w2^2*L2*sin(th2(i))+w3(i)^2*L3*sin(th34(i,1))-w4(i)^2*L4*sin(th34(i,2))];a=inv(C)*D;a3(i)=a(1);a4(i)=a(2);endfigure(4)plot(th2*180/pi,a3,th2*180/pi,a4); %绘制角加速度线图axis([0360-70000 65000])text(50,50000,'摇杆4角加速度(\alpha_4)')text(220,12000,'连杆3角加速度(\alpha_3)')gridxlabel('从动件角加速度')ylabel('从动件角加速度(rad\cdot s^{-2})')title('角加速度线图')disp '曲柄转角连杆转角-摇杆转角-连杆角速度-摇杆角速度-连杆加速度-摇杆加速度'ydcs=[th2'*180/pi,th34(:,1)*180/pi,th34(:,2)*180/pi,w3',w4',a3',a4'];disp(ydcs)>> ** * * * * 平面四杆机构的运动分析** *** *曲柄转角连杆转角-摇杆转角-连杆角速度-摇杆角速度-连杆加速度-摇杆加速度1.0e+004 *00.0044 0.0097 -0.0125 -0.0125-0.5478 4.84580.0005 0.0042 0.0094 -0.0126 -0.0107 0.2300 5.56300.0010 0.0039 0.0092 -0.0124 -0.00860.8946 6.05200.0015 0.0037 0.0091 -0.0119-0.0065 1.4143 6.29820.00200.0034 0.0090-0.0114 -0.0043 1.7801 6.31740.0025 0.0032 0.0089-0.0107-0.0021 2.0027 6.14670.0030 0.0030 0.0089 -0.0100 0.0000 2.1046 5.83390.0035 0.0028 0.0089 -0.0093 0.0020 2.1134 5.42720.00400.0026 0.0090 -0.00850.0038 2.0566 4.96870.0045 0.0025 0.0091 -0.00780.0054 1.9578 4.4918 0.00500.00230.0092 -0.0072 0.0069 1.8356 4.01980.00550.0022 0.0093 -0.00650.0082 1.7040 3.56800.00600.0021 0.0095 -0.0060 0.0094 1.5725 3.14500.0065 0.00190.0097 -0.0055 0.0104 1.4474 2.75450.00700.0018 0.0099 -0.00500.0113 1.33282.39680.0075 0.00170.0102 -0.00450.0121 1.2307 2.07020.0080 0.0017 0.0104-0.0041 0.0128 1.1425 1.77160.0085 0.00160.0107 -0.0037 0.0134 1.0687 1.49710.0090 0.0015 0.0110 -0.00340.0138 1.0095 1.24260.0095 0.0014 0.0112 -0.0030 0.0142 0.96531.00350.0100 0.0014 0.0115 -0.00270.0145 0.9364 0.77520.01050.0013 0.0118 -0.0024 0.0148 0.92320.5530 0.0110 0.00130.0121-0.0020 0.0149 0.9269 0.33190.01150.0013 0.0124 -0.0017 0.0150 0.9485 0.10690.0120 0.00120.0127 -0.0014 0.0150 0.9899-0.12760.01250.0012 0.0130 -0.0010 0.0149 1.0530 -0.37730.0130 0.0012 0.0133 -0.00060.0147 1.1404 -0.64810.0135 0.0012 0.0136 -0.0002 0.0145 1.2544 -0.94550.0140 0.0012 0.01390.0002 0.0141 1.3967 -1.27430.0145 0.00120.0142 0.0008 0.0136 1.5677 -1.6368 0.0150 0.0012 0.0144 0.0013 0.0129 1.7648 -2.03140.0155 0.0012 0.01470.00200.01211.9807 -2.4495 0.0160 0.0013 0.0149 0.00270.0112 2.2018 -2.8735 0.0165 0.0013 0.01510.00350.0101 2.4071-3.2754 0.01700.0014 0.0153 0.0044 0.0089 2.5697 -3.6186 0.0175 0.00150.01550.0053 0.0076 2.6616 -3.8650 0.0180 0.00160.01560.0063 0.0063 2.6609-3.9849 0.0185 0.0018 0.01570.0072 0.0049 2.5591 -3.96740.0190 0.0019 0.01580.0080 0.0035 2.3638 -3.82440.0195 0.0021 0.0159 0.0088 0.0022 2.0959 -3.58660.0200 0.00230.0159 0.0095 0.0010 1.7823 -3.2931 0.0205 0.00250.0159 0.0100 -0.0001 1.4487-2.9815 0.0210 0.0027 0.0159 0.0105-0.0011 1.1152-2.68090.0215 0.0029 0.0159 0.0108 -0.0020 0.7942-2.41030.0220 0.00310.0158 0.0111 -0.0028 0.4916 -2.17940.0225 0.0033 0.01580.0112 -0.0035 0.2086 -1.9913 0.02300.0036 0.01570.0112 -0.0042 -0.0565-1.84500.0235 0.0038 0.0156 0.0111 -0.0048 -0.3071 -1.73750.02400.0040 0.0155 0.0110-0.0054 -0.5475-1.66500.0245 0.0042 0.0154 0.0108 -0.0060-0.7817 -1.6233 0.0250 0.00440.01530.0104 -0.0065 -1.0139-1.6089 0.0255 0.0046 0.0151 0.0100-0.0071 -1.2479-1.61810.02600.0048 0.0150 0.0096-0.0077 -1.4868-1.6480 0.0265 0.00500.0148 0.0090 -0.0082-1.7336-1.69550.0270 0.00520.01460.0084 -0.0088-1.9905 -1.7574 0.02750.00540.0145 0.0076 -0.0095 -2.2588 -1.83040.0280 0.0055 0.0143 0.0068 -0.0101 -2.5391 -1.9100 0.0285 0.0056 0.01410.0058 -0.0108 -2.8305 -1.99100.0290 0.0057 0.0138 0.0048 -0.0115 -3.1300 -2.06600.02950.0058 0.01360.0037 -0.0122 -3.4326-2.1255 0.0300 0.0059 0.01330.0024 -0.0130 -3.7297 -2.15720.0305 0.00590.01310.0011 -0.0137 -4.0091 -2.1451 0.0310 0.00590.0128 -0.0004 -0.0145 -4.2538-2.06960.0315 0.0059 0.0125 -0.0019 -0.0152 -4.4419 -1.90790.0320 0.0058 0.0122 -0.0035 -0.0158 -4.5473 -1.63520.0325 0.0058 0.0119-0.0051 -0.0163 -4.5411 -1.2273 0.03300.0056 0.0115 -0.0066 -0.0166 -4.3954-0.66610.0335 0.0055 0.0112 -0.0081 -0.0167-4.08890.05510.03400.00530.0109 -0.0095 -0.0166 -3.6129 0.9243 0.03450.0051 0.0105 -0.0106 -0.0161 -2.9781 1.90580.0350 0.0049 0.0102-0.0115 -0.0152-2.2178 2.9395 0.03550.0047 0.0099-0.0122 -0.0140 -1.3857 3.94730.0360 0.0044 0.0097 -0.0125 -0.0125 -0.5478 4.8458图形输出:图2 连杆3的几个位置点图4 角加速度线图图5 角加速度线图。