基亏DSP NNC-PID的电液位置伺服控制系统设计
基于DSP-NNCPID的电液位置伺服控制系统的设计

( 湖北汽车工业学院 电子信息系, 湖北 十堰 4 20 ) 4 0 2
摘 要 : 文 以 电液 位置 伺服 机械 手第 一 关节为研 究对 象 , 出一 种基 于 N C—PD的 P 本 提 N I C机 +D P控 制 方 S
案 。详 细说 明 了系统硬件 电路 各部 分 的设计 和 系统 软件 各模 块 的设 计 。利 用神 经 N I I N —PD控 制 器 的 自
电路 和输 出放大 驱动 电路 以及 上位 机 P c等组 成 。实 现定位 和伺 服跟 踪控 制 。 收稿 日期 :0 0— 4— 1 2 1 0 0
Li ng YuHong a
( e a m n o l t nc C m nct nE gn eig H b i uo oi n ute D pr et f e r i t E c o s& o mu i i n ier , u e A tm t eId sis ao n v r Is tt, u e S i n4 2 0 , hn ) ntue H b i hy 4 0 2 C ia i a
rm tr e js n.T ecnrl ytm o eN C— I o t l r hw a tego oio akpe a ee ̄sl a ut t h o t s fh N PD C nr l o s h th odps i t c r— f d me os e t oe S t tn r
制 系统响应 快 和高精 度 的要求 。
1 电液位 置伺 服 系统 构 成
以喷漆机械手第一关节为对象 , 构造了研究实验装置 , 如图 l 所示。其中反馈器件采用精密导 电塑料 电位计 。整个控制系统以 D P为核心、 S 由喷漆机械手第一关节 、 位置传感器 、2 A D和 D A 信号调理 1位 / /、
基于DSP鲁棒PID控制器的电液位置伺服系统电模拟仿真研究

《工业控制计算机》2011年第24卷第6期*山西省教育厅2009年研究生优秀创新项目(20093104)摘要设计了一种基于灵敏度函数的鲁棒PID 控制器,并以DSPTMS320F2812加以实现。
为了验证该控制器的鲁棒性能,根据电液位置伺服系统的数学模型,设计了研究对象的电模拟仿真器。
通过鲁棒PID 控制器对电液位置伺服系统进行电模拟仿真实验。
仿真实验结果表明:该鲁棒PID 控制器在电模拟仿真器电路参数发生一定的变化时,具有很好的鲁棒性能。
关键词:DSP ,电液位置伺服系统,鲁棒PID 控制器AbstractA robust PID controller was presented based on a sensitivity function in this paper,and the controller is achieved with TMS320F2812of DSP.In order to verify the robustness of the controller,the electric simulator is designed based on the mathematic model of the electro-hydraulic position servo system.Then the robust PID controller is simulated with the elec-tric simulator of the electro-hydraulic position servo system.Keywords :DSP,electro-hydraulic position servo system,robust PID controller本文将数字信号处理器与电液位置伺服系统相结合,利用DSP 控制器处理速度快,控制精度高等特点,进行液压伺服系统的位置控制。
电液位置控制系统设计
电液伺服位置控制系统的设计与分析一、系统的设计要求设有一数控机床工作台的位置需要连接控制,进行电液位置控制系统设计。
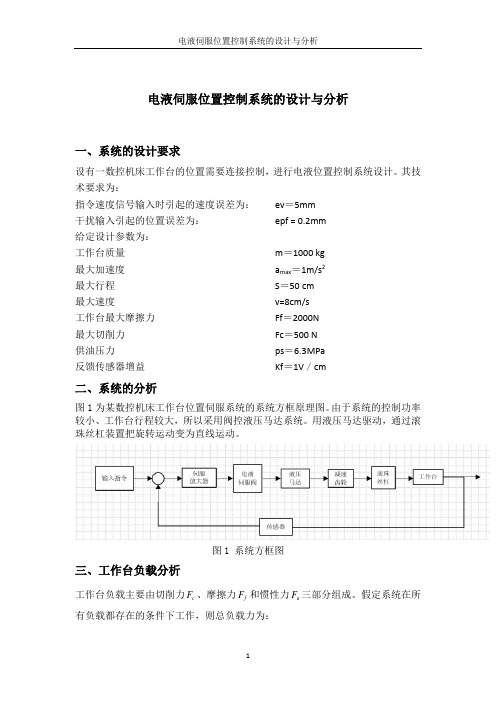
其技术要求为:指令速度信号输入时引起的速度误差为: ev =5mm 干扰输入引起的位置误差为: epf = 0.2mm 给定设计参数为: 工作台质量 m =1000 kg 最大加速度 a max =1m/s 2 最大行程 S =50 cm 最大速度 v=8cm/s 工作台最大摩擦力 Ff =2000N最大切削力 Fc =500 N 供油压力ps =6.3MPa 反馈传感器增益Kf =1V /cm二、系统的分析图1为某数控机床工作台位置伺服系统的系统方框原理图。
由于系统的控制功率较小、工作台行程较大,所以采用阀控液压马达系统。
用液压马达驱动,通过滚珠丝杠装置把旋转运动变为直线运动。
图1 系统方框图三、工作台负载分析工作台负载主要由切削力c F 、摩擦力f F 和惯性力a F 三部分组成。
假定系统在所有负载都存在的条件下工作,则总负载力为:max L c f a F F F F =++=3500N (1)四、动力元件参数选择(1) 工作台由液压马达经减速器和滚珠丝杠驱动。
根据力矩平衡方程,减速器输入轴力矩L T :/2L L T F t i π= (2)其中:t 为丝杠导程;i 为减速器传动比 液压马达最大转速max n 为:max max /n iv t = (3)其中:max v 为工作台的最大运动速度。
液压马达所需排量m Q 为6322/510m m L L Q D T p m ππ-===⨯ (4)其中:L p 为液压马达负载压力,一般取L p =23sp ,s p 为液压系统压力,m D 为液压马达弧度排量。
根据条件:i =2,t =1.2×210-m/r ,s p =63×105Pa 由式(2)、式(4)计算得:m D =0.8×610-3m /rad 所以,液压马达负载流量L q 为:536.6710/L q m s -=⨯ (5)伺服阀压降v p 为:max v s L p p p =- (6)考虑泄漏等影响,L q 增大15%, 4.6/min L q L =。
基于DSP的电液伺服控制系统研究

基于DSP的电液伺服控制系统研究摘要:电液伺服控制系统是一种应用广泛的自动控制系统,在工业生产、机械加工等领域中有着重要的应用价值。
其中,数字信号处理技术(DSP)在电液伺服控制系统中的应用,可以提高系统的控制精度和稳定性,同时也能够实现信号的高速采集和处理。
因此,基于DSP的电液伺服控制系统研究具有重要的理论和实践意义。
本文将对基于DSP的电液伺服控制系统进行深入研究,探索其在工程应用中的优势和局限,从而为相关领域的工程实践提供参考。
关键词:DSP;电液伺服;控制系统引言液压伺服系统由于具有响应快、位置跟踪准确等优点,被广泛应用到工业生产的各个领域中。
但是液压伺服系统具有较强的非线性、时滞等特点,因此众多学者提出了多种控制策略,获得了较好的控制效果。
针对液压伺服系统时变、模型不确定性等问题,采用预测函数控制算法设计了液压振动伺服控制器,实验结果表明该控制器具有较强的鲁棒性和抗扰能力。
利用多目标粒子群算法实现了非线性预测控制算法的滚动优化,并应用到液压伺服系统中,其算法负担小、实时性好。
1伺服节能液压动力系统伺服节能液压动力系统是通过利用大功率永磁伺服电机驱动定量泵,通过控制器实时控制伺服电机与液压泵的转速,从源头匹配电机功率与需求的关系,做到整个液压系统运行过程中尽量少的浪费能源,从而达到最大节能的目的,其核心技术属于变转速液压动力控制系统。
每个伺服节能液压动力单元均设置有一个压力传感器,当系统压力降低到设定值时,表明伺服节能液压动力系统输出的流量小于液压系统需要的流量输出,此时伺服节能液压动力系统启动其余的泵组单元以满足液压系统的流量需求。
(1)功率消耗测试,在绝大多数液压系统中,都存在保压工况,通过测试这种极限工况,对3个75kW伺服节能液压动力单元,24h的电能消耗为2kW·h。
在14MPa带载压力下,伺服节能系统的功率消耗为19.3kW;而恒压变量系统的功率消耗为24kW。
在16MPa带载压力下,伺服节能系统的功率消耗为21kW;而恒压变量系统的功率消耗为27kW。
基于CMAC的PID控制在电液伺服系统中的应用

c n r l r ra i s fe b c o t 1 h wi r c i ga i t ft es s m si r v d sg i c nl o tol e z e d a k c n r .T e s f t kn b l y o y t i e l e o t a i h e mp o e in f a t i y,me n h l ,te aw i e h
e e to—Biblioteka d a l o i o ev y tms i gv n l cr y r u i p st n s r o s se s ie .B p l ig t e d sg e o t l l o t m t e s s m n l — c i y a p yn e in d c nr g r h o t y t a d ai h oa i h e a
ABS TRACT :I iw o eta k n o t l rb e o e ee t h d a l ev y tms h rc mig ft c i g n ve ft rc ig c nr o lm f h lcr y r u i s r o s se ,s ot o n so a kn h op t o c r d t ni n a e u u l x s d i h rd t n lc n r l t o s n od rt ov h sp o lm ,a e fC r b l r e e t r s al e it n t e ta i o a o t h d .I r e o s l e ti rb e o y e i o me n i a o e e el d a Mo e t c lt n C n r l ri ito u e y te p p rb s d o o v n in l I c n r 1 F rt o i e o ・ d l iu a i o t l s n rd c d b h a e a e n c n e t a D o to. i ,a c mb n d c n Ar o oe o P s
自控课程设计-基于PID的电液位置伺服系统分析

基于PID的电液位置伺服系统分析摘要电液位置伺服系统是一种由电信号处理装置和液压动力机构组成反馈控制系统。
它综合了电气和液压两方面的优点,具有控制精度高、响应速度快、输出功率大、信号处理灵活、易于实现各种参量的反馈等优点。
其应用已遍及国民经济的各个领域。
本文主要通过matlab软件中的simulink工具,对电液位置伺服系统进行PID调节,并且利用临界比例度法进行参数整定,采用微分先行的方法对PID控制器进行改良,最终使系统的快速性、稳定性、准确性明显提高。
关键词电液位置伺服系统; PID控制; 临界比例度法; 微分先行Analysis of Electro-hydraulic Position Servo System Based onPIDABSTRACT Electro-hydraulic position servo system is a signal processing unit and the hydraulic power agencies feedback control system. It combines both electrical and hydraulic advantages of high control precision, fast response, high output power, signal processing, flexible, easy to implement various parameters of the feedback and so on. Its application has been throughout all areas of the national economy. In this paper, by using simulink software tools, electro-hydraulic position servo system PID control, and the use of critical ratio method for parameter tuning, using the method of differential forward PID controller for improvement, and ultimately make the system fast, stability, significantly improved accuracy.Key words electro-hydraulic position servo system; PID control; critical ratio method; differential forward1.引言电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。
基于PLC的电液伺服控制系统设计
沈阳工程学院毕业设计摘要电液伺服系统融合了电气和电液两个方面的优点。
具体来说有对系统反应很敏捷,很强大的精准控制,再输出端的功数值相当高、在处理系统送来的相应相当快,非常善于反馈各种参数控制量。
在综合了上述的优点后它在对需求速度核装载量大的对象时候更能发挥他的特长。
在各种形式的恶劣环境中均有着不同的应用。
比如说在军事上的应用、航空航天上的应用,钢铁电力行业的应用,制造加工业的应用、各种飞机车里的模拟台的控制、电炉冶炼的电极位置的控制以及各种实验机的压力的控制。
机械手运动伺服系统是隶属于电液控制系统的一类,他将小液压功率转换为大功率的液压信号,早些年代的机械手伺服系统是一起执行所有的命令,这样对机器的性能往往会有所限制,因为PLC是周期性循环扫描方式,每一瞬间就只能专心做一件事,同时使得运算速度特别快,让他与外部电器动作几乎同步,实现控制上的要求。
西门子S7-200具有模块化的结构,容易实现分布式的配置,同时具有很高电磁兼容特点,因此被广泛的应用。
本次设计采用S7-200 PLC,选用紫金桥软件作为上位机,实现对电液伺服控制系统的模拟。
关键词电液伺服系统,机械手,S7-200,紫金桥-I-基于PLC的电液伺服控制系统设计AbstactElectro hydraulic servo system integrated the advantages of the two aspects of electrical and electro hydraulic, with high control precision, fast response, large output power, signal processing flexibility, easy to achieve the feedback of various parameters, etc.. Therefore, in the load quality and response speed of occasions the most suitable for, its application has been throughout all areas of the national economy, such as control the position of the aircraft and ship steering control, radar and gun control, machine tool industry and trade and Taiwan, strip of rolling mill thickness control, electric furnace electrode position control, aircraft of various vehicles in the simulation table control, the generator speed control, material testing machine and other experimental machine pressure control.Belonging to the motion of the manipulator servo system of electro-hydraulic control system, he will be small power conversion for high power hydraulic signal and previous manipulator servo system is to execute all orders together, so on the machine's performance will limit, PLC cycle scanning mode, each moment concentrate on doing one thing, while the calculation speed is very fast, makes him almost simultaneous with the action of external appliances, achieve control requirements.SIEMENS S7-200 modular structure, easy to implement distributed configuration and cost-effective, strong electromagnetic compatibility characteristics, is widely used. The S7-200 is used as the upper computer, and the simulation is carried out on the purple bridge to realize the simulation of electro hydraulic servo control system.Key words electro hydraulic servo system, manipulator, S7-200, purple bridge-II-沈阳工程学院毕业设计目录摘要 (I)Abstact ............................................................................................................ I I 1绪论.. (1)1.1课题背景及选题意义 (1)1.2国内发展的趋势 (1)1.2.1我国的发展的初始阶段 (1)1.2.2我国发展的势头 (2)1.3本课题研究的内容 (2)2 电液伺服系统的基本原理 (3)2.1电液伺服控制系统的简介 (3)2.2电液伺服系统的概述 (4)2.2.1电液伺服阀驱动电路 (4)2.2.2电液伺服阀电流的显示电路 (4)2.3传感器的调节电路 (4)2.3.1系统模型 (5)2.3.2硬件的系统 (5)2.3.3软件的系统 (5)3 系统的设计 (7)3.1 PID的概述 (7)3.2调节器控制的规律 (8)4 控制设备及软件原理 (10)4.1 PLC概述 (10)4.1.1 PLC的定义 (10)4.1.2 PLC的特点 (10)4.1.3 PLC的应用与发展 (11)4.2 PLC的基本结构及工作原理 (11)4.2.1 PLC的基本结构 (11)4.2.2 PLC工作的原理 (13)4.2.3可编程控制器的编程原则和方法 (15)4.3监控软件的构成及功能 (15)4.3.1监控软件的用途及分类 (15)4.3.2紫金桥软件的功能及基本使用方法 (16)5 电液伺服系统的应用 (18)5.1设计思路 (18)5.2点设置 (18)5.3电气接线图 (19)5.4梯形图的实现 (19)5.5 I/O点的分配 (26)5.6调试运行 (27)结论 (30)致谢 (31)参考文献 (32)-III-沈阳工程学院毕业设计1绪论1.1课题背景及选题意义机械手是现代工业化自动控制中涌现出来的的一项新工艺,已经成为工业现代化制造的一项重要组成部分。
基于PID的电液位置伺服系统的设计

黪
.
每个时钟周 期不 断地 自减 1 , 直 到NE w— R E S UL T 结果产生 。 A L U 基 测试环境在模 块t e s t 中实现 , 它为系统产生源数据和数据接收 本运算 的描述如下 : 器, 并产生 时钟信号C P 和复位信号RE S E 】 。 在t e s t 模型 中实例化 了 a l wa y s@ (C P o r WO RK - I N o r O P E RAND I o r O P E R— 3 个流水线级。 输入F I F O的数据 宽度 与总 线D AT A_ F I F O1 一 A L U的 AND2 o r OPE RATI ON ) 相同, 该总 线 向AL U输送2 0 位的数据 。 ALU的结 果和 连接 输出 i f( C P = = 1&& WO RK— I N == 1 )b e g i n F I F O的数据总线宽度都 只有 8 位。 在t e s t 模块 中, 第一个i n i t i l块初始化C a P 信号 , 同时通过f o r e v e r C E I . s e( O P E RATI O N) ADD : TE M PM EM ORY = OPE RAND l + OPE RAND2 l 语句实现全 局时钟 信号。 任务f i  ̄ o l _ wr i t e 是数 据源和写操作 , 在C P S U B: TEMPM EM ORY = OPE RAND1 一 OPE RAND2 I 上 升沿和S P AC E L E F T _ S OURC E — F I F O1 有效时选择一部 分数据 M UL: TE M PM E M ORY = OP ERAND 1 + OP ERAND2 I 送入输入F I F O中。 第:  ̄i n i t i a l 块定义了要赋值的连线并对源和接 DI V : TE M_ PM E M ORY = OP ERAND 1 / OPE RAND2 l 收器初始化 , 还为流水 线级 产生复位信号 。 S P AC E L E F T — F I F O2 一 e n d c a s e S I NK初始 化为0 , 表示 接收器不能接 收数 据。 因此 , 流水线首先 充 i f( OP E RAT I ON > 1 ) 满。 S P AC E L E F T _ F I F O 2 _ S I NK置位 , 于是接收器接 收数据 。 输出 CYCLE S = 1 0t F I F O发送 数据 的速度 要快 于A L U送出这些数据的速度 , 因而输 出 e l s e F I F O 很快就空了。 此后 , 数据延迟一个时钟周 期后从AL U送 到接 收 CYCLES = 5t 器 中, 这样就 不再需要输出F I F O了。 最后一个i n i t i a l 块产生测试数 NEW — RES ULT = 1 l 据, 在等待复位状态过 后 , 运算0 +0 被写入 输入 F I F O中, 接 下来是 S PA C ELE FT— OUT = 0 t 2 0 + 1 0 等等 。 在f o r 循环 中, 运算I +1 O ( 0 < =I <1 O ) 写入 输入F I F O中。 最 e n d 后等待 1 0 0 0 0 个 时间单位 , 流水线清 空。 除此之外 , 在 AL U正在执 行运算时( C YC L E S 正在 自减) , 前面 6结语 的流水线级 不能给 出新数据 。 所 以, 同样地 , 在S P AC E L E F T - l I N信 本 文为提高微处理器 中A L U的运算 效率 , 根据流水 线的工作 号从1 变到0 时, S P AC E L E F T _ l O UT信号也变为0 。 这种情况下 , 就等 使用先进的描述工具ve m0 g HD L 来设计 一个三级运算 流水 待另- - +S P AC E L E F T _ I N 信号有效 。 由于S P AC E L E F T _ OUT 只有 原理 , 并构建 了测试环境 , 为设计高性 能的微处理器打 下基 础。 在C P == o N 才会变化 , 因此必 须等到 C P= = 1 时再送 出该信 线 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
度 和 快 速 响 应 的控 制要 求 。 常 规 PD控 制 的对 比 实验 表 明 , 系统 由于 具 有 自学 习和 实时 调 整 PD参 数 的能 力 , 与 I 该 I 使 系统 很 快 收 敛 于位 置稳 态 值 . 时 对 参 数 时 变表 现 出 良好 的 鲁 棒 性 。 好 地 解 决 了 液 压 系统 的 非 线 性 和 参 数 时 变 问 同 很
p e ii n ma a e n o NN P D b c i e ma e h l e n e h c n i o f u c r i o l e r a d p r mee r c so n g me t t C- I y ma hn - d ep r u d r t e o d t n o n et n n 。i a n a a t r i a n
d g n r t n t u i z d NNC P D c n r l r S s l la n n n efa a t e c p ct o r aie P D c n r lp r mee ’ e e e ai .I t ie o l - I o t l ’ ef e r ig a d s l d p i a a i t e l I o t a a tr S oe - - v y z o
第 l 8卷 第 6期
Vo . 8 11 No 6 .
电 子 设 计 工 程
El cr n c De in En i e rn e to i sg g n e i g
21 0 0年 6月
Jn. 00 u e 2 1
基亏 D PN CPD 的电液位置伺 服控制 系统设计 S N .I
De i n f ee t o h dr ul o ii n e v y t m s d n DS NNC— D sg o lc r — y a i p sto s r o s s e ba e o P c PI
LI ANG - n Yu ho g
( e a m n o l t n s o mu i t nE gnei , bi o t e n nte si t, hyn4 2 0 , hn ) D p r e tfEe r i &C m n ao n ier g Hue Au mo v d r s ntu S i 4 0 2 C i t coc ci n t i I s i I te a a
n -ie n a a tr d g n rt n f rh d a l y t m,me n i ,t e e p rme tS O S a g o u lt r p st n o l a a d p r mee e e e a i o y r u i s se nr o c a wh l e h x e i n H W o d q ai f o i o yo i
粱 玉 红
( 北汽车工业学院 湖 电 子 信 息 系 ,湖 北 十堰 420 ) 4 0 2
摘 要 : 出一 种 N C P D 电 液位 置伺 服控 制 系统 的 设 计 方 法 。 采 用 P 提 N .I C机 + S D P为 主 控 制 器 , N 自学 习、 N C 自适 应 对
PD 参 数 白整 定 的 控 制 算 法 . 满足 在 非 线 性 、 数 时 变性 、 确 定 性 条 件 下 , I 以 参 不 对机 械 手 电 液 位 置 伺 服 系统 进 行 高 精
r sr ie y i s l a a t e c p ct a d e p t bl y t a a tr d g n r t n I w l s l e h r b e f e tan d b t ef d p i a a i s - v y, n k e s i t o p r mee e e e ai . t e l o v s t e p o l ms o a i o
Ab t a t s r c =A e i n me d o lc r — y r u i o i o e v o t l r s se b s d o d sg  ̄o fee t h d a l p s in s r o c n r l y tm a e n NNC- I wa r s n e n t i o c t oe P D s p e e t d i h s p p r h e in o h y t m ad a e wa a e n P a e .T e d sg ft e s se h r w r s b s d o C+ P a i o t l r a d c u d ma e a q ik a d h g DS s man c nr l n o l k u c n ih oe 【
s l mo u ae h e u tc mp r d wi e u a I o t lp o e h t N e d l t.T e r s l o a e t r g lr P D c n r r v s t a NC- I a u c l a e t t f we k n a sae o o i o i
题 . 有 良好 的 定位 精 度 和 伺 服 跟 踪 性 能 。 具
关 键 词 :电液 位 置 伺 服 系统 ; S ;单 神 经 元 ; 经 N C PD;控 制 器 DP 神 N -I
中 图 分 类 号 : P 2 T 36 文献标识码 : A 文 章 编 号 :1 7 — 2 6 2 1 ) 6 o — 4 64 6 3 (0 00 一 0 7 0