Matlab_3 基于m文件的建模与仿真
基于MATLAB的M文件仿真

基于MATLAB的M文件仿真M文件:k=1;Int_F=inline('t','t');for x=[1,3,5]f_x(k)=x^3+x+log(x)*sin(x)+quad8(Int_F,0,x);k=k+1;endf_x>> CalcfxWarning: QUAD8 is obsolete. We use QUADL instead. > In quad8 at 35In Calcfx at 4f_x =2.5000 34.6550 140.9567M文件:function[mean,stdev]=stat(x)n=length(x);mean=sum(x)/n;stdev=sqrt(sum(x-mean).^2/n);>> x=[1,3,2];>> [k,l]=stat(x)k =2l =微积分方程组的MA TLAB函数:文件funcforex123.mfunction xdot=funcforex123(t,x,flag,r,l,c)xdot=zeros(2,1);xdot(1)=-r/l*x(1)-1/l*x(2)+1/l*f(t);xdot(2)=1/c*x(1);function in=f(t)in=(t>0)*1;文件Ex123.ml=1;c=0.1;for r=[1.5 3 5][t,x]=ode45('funcforex123',[-1,10],[0;0],[],r,l,c);figure(1);plot(t,x(:,1));hold on;xlabel('time sec');text(0.9,0.17,'\lefttarrow i_L(t)');grid;figure(2);plot(t,x(:,2));hold on;xlabel('time sec');text(0.5,0.3,'\leftarrow u_C(t)');grid;End>> ex123Warning: Unable to interpret TeX string "\lefttarrow i_L(t)". > In ex123 at 5Warning: Unable to interpret TeX string "\lefttarrow i_L(t)". > In ex123 at 7Warning: Unable to interpret TeX string "\lefttarrow i_L(t)". > In ex123 at 7文件ex123b.m[t,x]=ode45('funcforex123',[-1,10],[0;0],[],2,1,0.1); ts=0.001;t1=-1:ts:10;x1=interp1(t,x(:,2),t1,'spline');plot(t1,x1,'k-.');hold on;x1dot=[diff([x1])/ts,0];plot(t1,[diff([x1])/ts,0],'k');xlabel('time sec');ht=10/sqrt(7.75).*exp(-1.5*t1).*sin(sqrt(7.75)*t1).*(t1>0);plot(t1(1:50:length(t1)),ht(1:50:length(t1)),'ko');legend('Syep response','Impulse response','Theoretic impluse response'); >> ex123b欧拉算法的MA TLAB程序:文件sybeuler.mfunction [tout,yout]=sybeuler(odefile,t0,h,th,y0,P) tout=[t0:h:th]';yout(length(tout),length(y0))=0;kk=1;for t=tout'yout(kk,:)=y0';kk=kk+1;k1=h*eval([odefile'(t,y0,P)']);y0=y0+k1;end文件mystateEQ.mfunction xdot=mystateEQ(t,x,P)xdot=zeros(2,1);r=P(1);l=P(2);c=P(3);xdot(1)=-r/l*x(1)-1/l*x(2)+1/l*f(t);xdot(2)=1/c*x(1);function in=f(t)in=(t>0)*1;文件mystateEQforODE45.mfunction xdot=mystateEQforODE45(t,x,flag,P) xdot=zeros(2,1);r=P(1);l=P(2);c=P(3);xdot(1)=-r/l*x(1)-1/l*x(2)+1/l*f(t);xdot(2)=1/c*x(1);function in=f(t)in=(t>0)*1;文件sybeulerTEST.mtic;[t,x]=ode45('mystateEQforODE45',[0,10],[0;0],[],[3 1 0.1]); toc plot(t,x,'k.');hold on;for h=[0.2,0.1,0.01]tic;[t,x]=sybeuler('mystateEQ',0,h,10,[0;0],[3 1 0.1]);tocplot(t,x,'k');endlegend('u_C(t)ode45','i_L(t)ode45','sybeuler');。
MATLAB数学建模和仿真指南
MATLAB数学建模和仿真指南第一章:介绍MATLAB数学建模和仿真MATLAB(Matrix Laboratory),是一种强大的数学软件工具,它提供了丰富的数学建模和仿真功能。
在本章中,我们将介绍MATLAB数学建模和仿真的概念、优势以及应用领域。
第二章:MATLAB基础知识在使用MATLAB进行数学建模和仿真之前,有必要掌握一些MATLAB的基础知识。
本章将介绍MATLAB的界面、基本命令、变量定义和操作,以及数学函数的使用。
第三章:数学建模数学建模是将实际问题抽象为数学模型,并利用数学方法对问题进行分析、计算和预测的过程。
在本章中,我们将详细介绍MATLAB在数学建模中的应用,包括线性规划、非线性规划、差分方程、微分方程等方面的建模方法和求解技巧。
第四章:仿真技术仿真是通过构建虚拟模型来模拟实际系统的行为和性能的过程。
MATLAB提供了丰富的仿真工具和技术。
本章将介绍MATLAB仿真技术的基本原理和方法,包括系统仿真、离散事件仿真、连续仿真等,并通过实例演示如何使用MATLAB进行仿真分析。
第五章:数据可视化与分析数据可视化和分析是MATLAB的重要功能之一。
在本章中,我们将介绍MATLAB中的数据导入、清洗和处理技巧,以及各种数据可视化方法,如二维图像、三维图像、热力图、散点图等。
此外,还将介绍如何使用MATLAB进行统计分析和数据挖掘。
第六章:优化算法与求解器优化算法是MATLAB中的重要工具,可以用于求解各种最优化问题。
本章将介绍MATLAB中常用的优化算法和求解器,如线性规划、非线性规划、整数规划、遗传算法等,并提供相应的应用示例。
第七章:控制系统设计与仿真控制系统是实现对动态系统行为的控制和调节的关键。
在本章中,我们将介绍MATLAB在控制系统设计和仿真中的应用,包括传统控制方法、现代控制方法、PID控制器设计等,并演示如何通过MATLAB进行控制系统性能分析和仿真。
第八章:神经网络建模与仿真神经网络是一种模拟人脑神经元之间信息交流的模型,广泛应用于模式识别、数据挖掘、预测等领域。
Matlab中的模拟与仿真方法与工具
Matlab中的模拟与仿真方法与工具Matlab是一种广泛应用于科学与工程领域的编程语言和开发环境。
它提供了丰富的工具集与函数库,用于数据处理、数值计算、绘图等应用。
而在模拟与仿真方面,Matlab也拥有强大的功能与灵活性。
本文将介绍Matlab中的模拟与仿真方法与工具,涵盖数学建模、动态系统仿真、计算机视觉等方面的应用。
一、数学建模与仿真数学建模是一种通过数学方法来描述现实问题的过程,而Matlab提供了丰富的数学工具与函数,方便用户进行建模与仿真。
例如,可以利用Matlab中的优化工具箱,通过数学模型寻找最佳解决方案。
在这个过程中,用户可以选择合适的模型,引入约束条件,并使用优化算法求解。
另一方面,Matlab还提供了符号计算功能,可以实现对数学公式的符号化处理。
这对于一些复杂的问题尤为重要,它可以帮助用户更好地理解数学模型,并更方便地进行模拟与仿真。
通过符号计算,用户可以进行符号求导、符号积分等操作,从而得到更清晰的数学表达式。
二、动态系统仿真动态系统仿真是指利用数学模型来模拟和分析现实世界中的动态系统,Matlab拥有丰富的工具与函数库,用于动态系统的建模与仿真。
例如,用户可以利用Matlab中的Simulink工具箱,通过图形界面搭建动态系统的模型。
Simulink提供了丰富的模块库,用户可以选择合适的组件,通过连接与参数设置,构建完整的系统模型。
在动态系统仿真过程中,Matlab还支持对系统进行参数优化与辨识。
用户可以通过改变系统参数,观察系统响应,并使用优化算法来寻找最佳参数组合。
这对于系统设计与优化非常重要,可以帮助用户在系统设计初期就得到全面的性能评估。
三、计算机视觉仿真计算机视觉是指通过计算机算法和技术来模拟和实现人类的视觉功能,Matlab拥有强大的计算机视觉工具箱,可以进行图像处理、模式识别、目标检测等应用。
用户可以利用Matlab中的图像处理函数,对图像进行滤波、边缘检测、特征提取等操作。
使用Matlab技术进行建模和仿真的步骤

使用Matlab技术进行建模和仿真的步骤引言:Matlab是一种功能强大的数学计算软件,被广泛应用于各个领域的科学研究和工程技术中。
其中,建模和仿真是Matlab应用的重要方面,它可以帮助工程师和研究人员分析和预测各种系统的行为。
本文将介绍使用Matlab技术进行建模和仿真的步骤,包括建立模型、定义参数、进行仿真和分析结果等。
一、确定建模目标在开始建模之前,首先需要明确建模的目标和需求。
例如,我们可以通过建模来分析电路、机械系统或者物理过程等。
只有明确了建模目标,才能选择合适的建模方法和工具。
二、选择合适的建模方法建模方法可以根据系统的特点和需求进行选择。
常用的建模方法包括物理建模、统计建模、数据驱动建模等。
物理建模是基于系统的物理原理和方程进行建模,统计建模是通过统计分析来描述系统的行为,数据驱动建模则是利用已有的数据来建立模型。
根据不同的情况,选择合适的建模方法至关重要。
三、建立模型在Matlab中,建立模型可以使用Simulink或者编程的方式。
Simulink是一种基于图形化界面的建模工具,可以通过拖拽组件和连接线来搭建模型。
编程的方式则可以使用Matlab脚本语言来描述系统的数学模型。
根据系统的特点和个人的喜好,选择适合自己的建模方式。
四、定义参数和初始条件在建立模型之后,需要定义参数和初始条件。
参数是影响系统行为的变量,可以通过Matlab的变量赋值来定义。
初始条件是模型在仿真开始之前系统的状态,也需要进行设定。
对于一些复杂的系统,可能需要对模型进行调优和参数敏感性分析等,以获取更加准确的结果。
五、进行仿真在模型建立并定义好参数和初始条件之后,就可以进行仿真了。
仿真是通过运行模型,模拟系统在不同条件下的行为。
Matlab提供了强大的仿真功能,可以灵活地设置仿真时间步长和仿真条件,进行数据记录和后续分析。
六、分析结果仿真完成后,需要对仿真结果进行分析。
Matlab提供了各种分析工具和函数,可以方便地对仿真数据进行处理和可视化。
基于Matlab的m序列生成及性能仿真
PN_mod8=reshape(PN—mod8,1,512); end
location=1; k=1: for i=1:length(reg_a11)
if reg__test==reg_all(i,:) location(k)=i; k=k+1:
%寻找初始状态,以验证其周期
end
end
合伪随机序列的基本性质,可以满足扩频序列的设计需求。
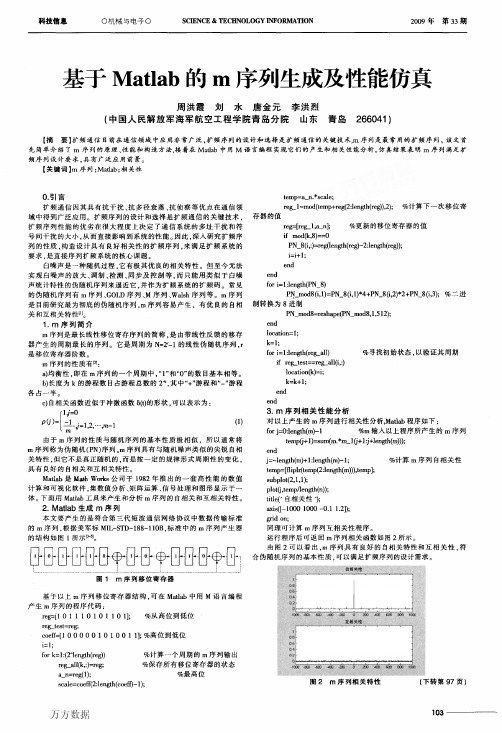
基于以上m序列移位寄存器结构,可在Matlab中用M语言编程
产生113序列的程序代码:
reg=[1 0 1 1 1 0 1 0 1 1 0 1];
%从高位到低位
re。gLtest=reg;
eoeff=[1 0 0 0 0 0 1 0 1 0 0 1 11;%高位到低位
%计算In序列自相关性
subplot(2,1,1);
plot(j,temp/length(n)); tide(7自相关性,);
axis([一1000 1000—0.1 1.2]);
酣d on; 同理可计算m序列互相关性程序。
运行程序后可返回D1序列相关函数如图2所示。
由图2可以看出,m序列具有良好的自相关特性和互相关性,符
关和互相关特性【”。
1.m序列简介
m序列是最长线性移位寄存序列的简称.是由带线性反馈的移存
器产生的周期最长的序列。它是周期为N=2r_1的线性伪随机序列,r
是移位寄存器阶数。 m序列的性质有闭:
a)均衡性,即在m序列的一个周期中,…1’和…0’的数目基本相等。
b)长度为k的游程数目占游程总数的24.其中“+”游程和“一”游程
i=l;
for k=1:(2^length(reg))
%计算一个周期的rfl序列输出
基于Matlab的m序列的仿真与实现

a=[1101010001110111110010011000010]; b=a; Nb=length(b); N=120; x=[1:N]; for k=1:N c=xor(a,b); D=sum(c); A=Nb-D; % R(k)=(A-D)/(A+D); b=[b(Nb),b(1:Nb-1)]; plot(k,R(k),'ro'); hold on end plot(x,R,'g'); grid 运行结果:
-5
图二 5 级线性反馈移位寄存器产生 m 序列的仿真系统 (2)利用 Simulinkm观测 m 序列时频域特性
图三 5 级线性反馈移位寄存器产生 m 序列的时域波形
图四 5 级线性反馈移位寄存器产生 m 序列的频域波形 ToWorkspace的wr5就是所得m序列,我们取它一个完整
的周期,其周期是 31,序列如下: 1101010001110111110010011000010 2.3 利用 Matlab 编程环境求 m 序列的自相关特性 程序: clear
F(x)=C +C x1+C x2+…=
01
2
(2)
(3)生成函数(亦称序列多项式)可以表示为如下形式
G(x)=a +a x1+a x2+…=
01
2
当初始状态为
a =1,a =a =…=a =0
-m
-m+1 -r+2
-1
联立式(1)、(2)、(3)可得
(3) (4)
国防工业工业出版社,2006,5. [4]查光明,熊贤祚.扩频通信[M].西安:西安电子科技
大学出版社,2002. [5]曾兴雯,刘乃安,孙献璞.扩展频谱通信及其多址技术
[M].北京:高等教育出版社,2004. [6]樊昌信,张甫翊,吴成柯.现代通信[M].北京:高等
MATLAB仿真与建模技术详解
MATLAB仿真与建模技术详解一、概述在现代科技的发展中,仿真与建模技术扮演着重要的角色。
MATLAB作为一种强大的科学计算软件,被广泛应用于各个领域的仿真与建模工作中。
本文将详细介绍MATLAB的仿真与建模技术,包括其概念、工作原理以及实际应用。
二、MATLAB仿真技术的概念1. 什么是仿真仿真是指利用计算机模拟现实世界的过程或系统,以便更好地理解、研究和预测其行为。
MATLAB仿真技术通过数学建模和计算分析,可以模拟各种现实情境,如物理系统、电路、信号处理等。
2. MATLAB仿真的优势MATLAB具有简单易学、丰富的工具箱、高效的数值计算和可视化能力等优势。
它提供了一种快速、准确、灵活的仿真环境,能够满足不同领域的仿真需求。
三、MATLAB仿真技术的工作原理1. 数学建模MATLAB仿真技术的第一步是进行数学建模,即将现实世界的问题转化为数学表达式。
在MATLAB中,可以利用符号计算工具箱进行数学公式的推导和符号计算,得到准确的数学模型。
2. 模型参数设置在进行仿真之前,需要设置模型的参数。
MATLAB提供了丰富的工具箱,如控制系统工具箱、信号处理工具箱等,可以方便地设置参数,并对其进行优化和调整。
3. 仿真运行设置好参数后,就可以进行仿真运行了。
MATLAB提供了强大的计算和数值分析功能,可以对模型进行求解、优化和优化。
仿真结果可以以图形、表格等形式展示,以帮助用户更好地理解系统的行为。
四、MATLAB建模技术的概念1. 什么是建模建模是指将现实世界的问题抽象成数学模型的过程。
MATLAB建模技术通过将问题的关键部分进行抽象和简化,构建数学模型,从而对问题进行分析和求解。
2. MATLAB建模的应用领域MATLAB建模技术广泛应用于各个领域,如控制系统、信号处理、电机设计等。
通过建模,可以把复杂的系统简化为数学模型,方便进行分析和优化。
五、MATLAB建模技术的实际应用1. 控制系统建模控制系统建模是MATLAB的常见应用之一。
基于MATLAB的m序列仿真
3.1 系统结构功能设计 ......................................................................................... 9 3.2 GUI 界面设计 ................................................................................................. 9 第四章 系统调试结果分析 ......................................... 11
1.2
系统设计流程图
本文通过软件 Matlab 编写程序,从而在 GUI 环境下看到 m 序列的产生、m 序列的自 相关和互相关函数图形,其系统设计流程图如图 1.1 所示: 开始
用 Matlab 编写程序产生两个 m 序列
对 m 序列进行自相关特性分析
对 m 序列进行互相关特性分析
用 Matlab GUI 显示仿真结果
Ns (2n 1) / n
其中, ( x) 为欧拉函数,其值小于等于 x ,并与 x 互质的正整数的个数(包括 1 在内)。例如对于 4 级移位寄存器,则小于 24 1 15 并与 15 互质的数为 1、2、4、 7、8、11、13、14,共 8 个,所以 (15) 8, Ns 8/ 4 2 ,所以 4 级移位寄存器最多能 产生的 m 序列数为 2。 总之,移位寄存器的反馈系数决定是否产生 m 序列,起始状态决定序列的起始 点,不同的反馈系数产生不同的码序列。 在 Matlab 的 GUI 环境中,程序代码如下:
第一章
1.1 设计内容及要求
1.1.1 设计内容
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-0.015 0
2
4
0
6
8
10
-0.04 0
2
4 t/s
6
8
10
t/s
-0.02 0 0.05 2 4 t/s dθdt(rad/s) 6 8 10
dθdt(rad/s)
0
16
-0.05 0
2
4 t/s
6
8
10
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
图形化显示计算结果
分别绘制在两幅图中
Y/m
1000
1500
500
1000 1000
0 0 500 1000 1500
1500
2000
2000
2500 3000
40
X/m
哈尔滨工业大学控制与仿真中心
研究方法
采用数值积分方法求解微分方程初值问题
欧拉法 梯形法 龙格库塔法
30
哈尔滨工业大学控制与仿真中心
、
拦截系统建模与仿真
仿真步骤
编写描述运动方程的m函数 编写数值积分方法求解微分方程初值问题的m文件 初始化微分方程的初值,设定积分步长和时间 调用数值积分程序,在程序中调用m函数求解方程 存储计算结果 图形化显示计算结果
0.005
θ(rad)
0
-0.005
24
-0.01 0
5
10
15
20
哈尔滨工业大学控制与仿真中心 25 30
基于m文件的建模与仿真
问题回顾 单摆系统建模与仿真 拦截系统建模与仿真
25
哈尔滨工业大学控制与仿真中心
拦截系统建模与仿真
系统模型
运动方程
dV P cos α − X − mg sin θ m = dt dθ mV = P sin α + L − mg cos θ dt 2 X = ρV C (α , Ma ) S d 2 2 L = ρV C (α ) S y 2 P =0
27
哈尔滨工业大学控制与仿真中心
、
拦截系统建模与仿真
系统模型
相对运动方程
dr = dt VT cosηT − V cosη dq 1 (V sin η − V sin η ) = T T dt r q = σ +η q σ T + ηT = y − yM q = arctan( T ) xT − xM
采用数值积分方法求解微分方程初值问题
欧拉法 梯形法 龙格库塔法
7
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
步骤
编写描述运动方程的m函数 编写数值积分方法求解微分方程初值问题的m文件 初始化微分方程的初值,设定积分步长和时间 调用数值积分程序,在程序中调用m函数求解方程 存储计算结果 图形化显示计算结果
h ( K1 + 2 K 2 + 2 K 3 + K 4 ) 6
dx(t ) = f (t , x(t )) dt
h h K 2 = f (t (k ) + , x(k ) + K1 ) 2 2 h h K 3 = f (t (k ) + , x(k ) + K 2 ) 2 2 K 4 = f (t (k ) + h, x(k ) + hK 3 )
、
单摆系统建模与仿真
图形化显示计算结果
线型控制
0.04
θ(rad) dθdt(rad/s)
0.02
0
-0.02
20
-0.04 0
2
4 t/s
6
8
10
哈尔滨工业大学控制与仿真中心
、
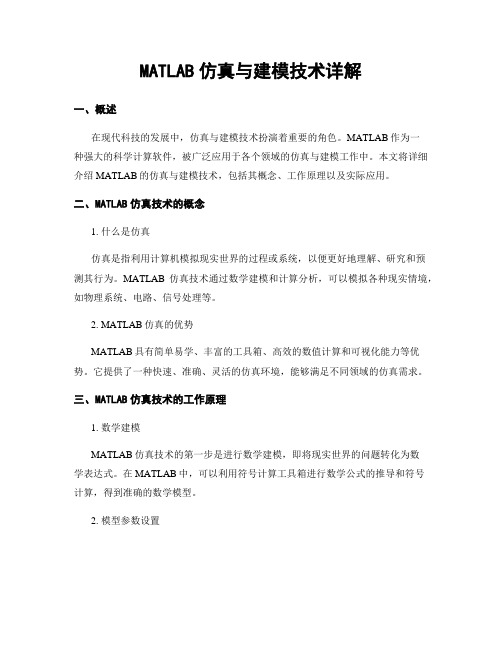
单摆系统建模与仿真
图形化显示计算结果
绘制在同一幅图中,分栏
0.02
θ/rad
θ(rad)
0
-0.02 0 0.05
基于MATLAB的系统建模与仿真分析
(基于m文件的建模与仿真)
哈尔滨工业大学控制与仿真中心
4.3 基于m文件的建模与仿真
4.3.1 问题回顾 4.3.2 单摆系统建模与仿真 4.3.3 拦截系统建模与仿真
2
哈尔滨工业大学控制与仿真中心
问题回顾
系统建模与仿真问题
问题不存在解析解,或解析解不直观
1 1 − m sin x
2
dx
6
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
考虑阻力
速度 (rad/s) 比例系数 0.001 0.1 0.005 0.11 0.008 0.14 0.01 0.2 0.02 0.5
假定已知初始角度和角速度,怎么求解?
1 x= x1 (0) x10 x 2 kL g x2 (0) = x20 x x x sin x = − 2 2 2 1 m L
L=1.0 L=0.2 L=0.5 L=5.0 L=10.0
23
5 t/s
10
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
基于编写的程序对单摆系统进行分析
分析摆长和初始条件不变情况下,不同质量时的周期变化
质量(kg) 0.2 0.5 1.0 5.0 10.0
更改程序中的m值
0.01 m=1.0 m=0.2 m=0.5 m=5.0 m=10.0
求解步骤 1.建立m函数描述问题 2.编写数值积分算法,对问题进行求解 3.绘制结果图形
3
哈尔滨工业大学控制与仿真中心
基于m文件的建模与仿真
问题回顾 单摆系统建模与仿真 拦截系统建模与仿真
4
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
系统模型
运动方程
1 x= x1 (0) x10 x 2 kL g x2 (0) = x20 x x x sin x = − 2 2 2 1 m L
8
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
描述运动方程的m函数
pendulumequ.m
function dy=pendulumequ(t,x,k,L,m,g) • dy(1) = x(2); • dy(2) = k*L/m*x(2)*abs(x(2)) - g/L*sin(x(1)); • dy = dy'; end
2
4 t/s
6
8
10
dθdt(rad/s)
dθdt(rad/s)
0
-0.05 0
2
4 t/s
6
8
10
21
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
基于编写的程序对单摆系统进行分析
考虑气动阻力系数
速度 (rad/s) 比例系数 0.001 0.1 0.005 0.11 0.008 0.14 0.01 0.2 0.02 0.5
31
哈尔滨工业大学控制与仿真中心
、
拦截系统建模与仿真
程序流程
32
哈尔滨工业大学控制与仿真中心
、
拦截系统建模与仿真
描述运动方程的程序代码
33
哈尔滨工业大学控制与仿真中心
、
拦截系统建模与仿真
编写龙格库塔法积分求解初值问题
龙格库塔法公式
x(k + 1) = x(k ) +
K1 = f (t (k ), x(k ))
34
哈尔滨工业大学控制与仿真中心
、
拦截系统建模与仿真
初始化微分方程的初值,设定积分步长和时间
35
哈尔滨工业大学控制与仿真中心
、
拦截系统建模与仿真
初始化微分方程的初值,设定积分步长和时间
36
哈尔滨工业大学控制与仿真中心
、
拦截系统建模与仿真
初始化微分方程的初值,设定积分步长和时间
37
哈尔滨工业大学控制与仿真中心
哈尔滨工业大学控制与仿真中心
、
拦截系统建模与仿真
系统模型
运动方程
dxT = V= VT cos θT Tx dt dy T = = V VT sin θT Ty dt dV T =0 dt dθ g cos θT aT − + T = dt V VT T
end
12
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
存储计算结果
角度和角速度构成 的矩阵 时间
13
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
最终的代码
14
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
存储计算结果到数据文件
save result
加载数据文件到工作空间
需要编写插值函数(Matlab函数interp1)
22
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
基于编写的程序对单摆系统进行分析
分析质量和初始条件不变情况下,不同摆长时的周期变化
摆长(m) 0.2 0.5 1.0 5.0 10.0
0.01 更改程序中的L值 0.005
θ(rad)
0 -0.005 -0.01 0
变量定义
摆球质量为m 摆杆长度为L 摆角为θ 阻力系数k
x2 =
dθ dt
x1 = θ
5
哈尔滨工业大学控制与仿真中心
、
单摆系统建模与仿真
系统模型
不考虑阻力系数,小角度时
= θ A cos(
角度大时
T =4
g t +ϕ) L
L K (sin 2 θ 0 ) g