03制动力分配曲线(空满载一起)-复制到MATLAB
汽车理论习题Matlab程序

确定一轻型货车的动力性能货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算:1绘制汽车驱动力与行驶阻力平衡图;2求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率;3绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间;轻型货车的有关数据:汽油发动机使用外特性的Tq-n曲线的拟合公式为式中,Tq为发动机转矩N m;n为发动机转速r/min;发动机的最低转速nmin =600r/min,最高转速nmax=4000r/min;装载质量 2000kg 整车整备质量 1800kg 总质量 3880kg 车轮半径传动系机械效率ηt=滚动阻力系数f=空气阻力系数×迎风面积C D A=主减速器传动比i0=飞轮转动惯量 I f=m2二前轮转动惯量I w1=m2四后轮转动惯量I w2=m2质心至前轴距离满载 a=质心高满载 hg=解:Matlab程序:1 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序: n=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;nmin=600;nmax=4000;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;Ft1=Tqig1i0nT/r;Ft2=Tqig2i0nT/r;Ft3=Tqig3i0nT/r;Ft4=Tqig4i0nT/r;Ft5=Tqig5i0nT/r;ua1=rn/ig1/i0;ua2=rn/ig2/i0;ua3=rn/ig3/i0;ua4=rn/ig4/i0;ua5=rn/ig5/i0;ua=0:5:120;Ff=Gf;Fw=CDAua.^2/;Fz=Ff+Fw;plotua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz;title'驱动力-行驶阻力平衡图';xlabel'uakm/s';ylabel'FtN';gtext'Ft1',gtext'Ft2',gtext'Ft3',gtext'Ft4',gtext'Ft5',gtext'Ff+Fw'; zoom on;x,y=ginput1;zoom off;disp'汽车最高车速=';dispx;disp'km/h';汽车最高车速=km/h2求汽车最大爬坡度程序:n=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;nmin=600;nmax=4000;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;Ft1=Tqig1i0nT/r;ua1=rn/ig1/i0;Ff=Gf;Fw1=CDAua1.^2/;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100tanasinmaxFi1/G;disp'汽车最大爬坡度=';dispimax;disp'%';汽车最大爬坡度=%3求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;nmin=600;nmax=4000;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;Ft1=Tqig1i0nT/r;Ft2=Tqig2i0nT/r;Ft3=Tqig3i0nT/r;Ft4=Tqig4i0nT/r;Ft5=Tqig5i0nT/r;ua1=rn/ig1/i0;ua2=rn/ig2/i0;ua3=rn/ig3/i0;ua4=rn/ig4/i0;ua5=rn/ig5/i0;Fw1=CDAua1.^2/;Fw2=CDAua2.^2/;Fw3=CDAua3.^2/;Fw4=CDAua4.^2/;Fw5=CDAua5.^2/;Ff=Gf;deta1=1+Iw1+Iw2/mr^2+Ifig1^2i0^2nT/mr^2;deta2=1+Iw1+Iw2/mr^2+Ifig2^2i0^2nT/mr^2;deta3=1+Iw1+Iw2/mr^2+Ifig3^2i0^2nT/mr^2;deta4=1+Iw1+Iw2/mr^2+Ifig4^2i0^2nT/mr^2;deta5=1+Iw1+Iw2/mr^2+Ifig5^2i0^2nT/mr^2;a1=Ft1-Ff-Fw1/deta1m;ad1=1./a1;a2=Ft2-Ff-Fw2/deta2m;ad2=1./a2;a3=Ft3-Ff-Fw3/deta3m;ad3=1./a3;a4=Ft4-Ff-Fw4/deta4m;ad4=1./a4;a5=Ft5-Ff-Fw5/deta5m;ad5=1./a5;plotua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5;axis0 99 0 10;title'汽车的加速度倒数曲线';xlabel'uakm/h';ylabel'1/a';gtext'1/a1';gtext'1/a2';gtext'1/a3';gtext'1/a4';gtext'1/a5'; a=maxa1;af=asinmaxFt1-Ff-Fw1/G;C=tanaf/a/L+hgtanaf/L;disp'假设后轮驱动,最大爬坡度相应的附着率=';dispC;假设后轮驱动,最大爬坡度相应的附着率=4 >>clearnT=;r=;f=;CDA=;i0=;If=;Iw1=;Iw2=;L=;a=;hg=;m=3880;g=;G=mg; ig= ;nmin=600;nmax=4000;u1=rnmin./ig/i0;u2=rnmax./ig/i0;deta=0ig;for i=1:5detai=1+Iw1+Iw2/mr^2+Ifigi^2i0^2nT/mr^2;endua=6::99;N=lengthua;n=0;Tq=0;Ft=0;inv_a=0ua;delta=0ua; Ff=Gf;Fw=CDAua.^2/;for i=1:Nk=i;if uai<=u22n=uaiig2i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig2i0nT/r;inv_ai=deta2m/Ft-Ff-Fwi;deltai=inv_ai/;elseif uai<=u23n=uaiig3i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig3i0nT/r;inv_ai=deta3m/Ft-Ff-Fwi;deltai=inv_ai/;elseif uai<=u24n=uaiig4i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig4i0nT/r;inv_ai=deta4m/Ft-Ff-Fwi;deltai=inv_ai/;elsen=uaiig5i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig5i0nT/r;inv_ai=deta5m/Ft-Ff-Fwi;deltai=inv_ai/;enda=delta1:k;ti=suma;endplott,ua;axis0 80 0 100;title'汽车2档原地起步换挡加速时间曲线';xlabel'时间ts';ylabel'速度uakm/h';>> ginputans =所以汽车2档原地起步换挡加速行驶至70km/h 的加速时间约为已知货车装用汽油发动机的负荷特性与万有特性;负荷特性曲线的拟合公式为:44332210e e e e P B P B P B P B B b ++++=其中,b 为燃油消耗率g/kW h ;Pe 为发动机净功率kW ;拟合式中的系数随转速n 变化;怠速油耗s mL Q id /299.0=怠速转速400r/min;计算与绘制题中货车的1汽车功率平衡图;2最高档与次高档的等速百公里油耗曲线;或利用计算机求货车按JB3352-83规定的六工况循环行驶的百公里油耗;计算中确定燃油消耗值b 时,若发动机转速与负荷特性中给定的转速不相等,可由相邻转速的两根曲线用插值法求得;解:Matlab 程序:(1)汽车功率平衡图程序:clearn=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;ua1=rn/ig1/i0;ua2=rn/ig2/i0;ua3=rn/ig3/i0;ua4=rn/ig4/i0;ua5=rn/ig5/i0;Pe1=Tq.ig1i0.ua1./3600r;Pe2=Tq.ig2i0.ua2./3600r;Pe3=Tq.ig3i0.ua3./3600r;Pe4=Tq.ig4i0.ua4./3600r;Pe5=Tq.ig5i0.ua5./3600r;ua=0::119;Ff=Gf;Fw=CDAua.^2/;Pf=Ffua/3600;Pw=Fw.ua/3600;Pe0=Pf+Pw./nT;Pe=maxPe1;plotua1,Pe1,ua2,Pe2,ua3,Pe3,ua4,Pe4,ua5,Pe5,ua,Pe0,ua,Pe;axis0 119 0 100;title'汽车功率平衡图';xlabel'uakm/h';ylabel'Pekw';gtext'1',gtext'2',gtext'3',gtext'4',gtext'5',gtext'Pf+Pw/et',gt ext'Pe';2最高档与次高档的等速百公里油耗曲线程序:clearn=600:1:4000;m=3880;g=;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;n0=815 1207 1614 2012 2603 3006 3403 3804;B00= ;B10= ;B20= ;B30= ;B40= ;B0=splinen0,B00,n;B1=splinen0,B10,n;B2=splinen0,B20,n;B3=splinen0,B30,n;B4=splinen0,B40,n;Ff=Gf;ua4=rn/ig4/i0;ua5=rn/ig5/i0;Fz4=Ff+CDAua4.^2/;Fz5=Ff+CDAua5.^2/;Pe4=Fz4.ua4./nT1000;Pe5=Fz5.ua5./nT1000;for i=1:1:3401b4i=B0i+B1iPe4i+B2iPe4i.^2+B3iPe4i.^3+B4iPe4i.^4; b5i=B0i+B1iPe5i+B2iPe5i.^2+B3iPe5i.^3+B4iPe5i.^4; endpg=;Q4=Pe4.b4./.ua4.pg;Q5=Pe5.b5./.ua5.pg;plotua4,Q4,ua5,Q5;axis0 100 10 30;title'最高档与次高档等速百公里油耗曲线';xlabel'uakm/h';ylabel'百公里油耗L/100km';gtext'4',gtext'5';i为、、、、时的燃油经济性—加速时改变题中轻型货车的主减速器传动比,做出i值对汽车性能的影响;间曲线,讨论不同解:Matlab程序:主程序:i0=,,,,; %输入主传动比的数据for i=1:1:5yi=jiasushijiani0i; %求加速时间endy;for i=1:1:5bi=youhaoi0i; %求对应i0的六工况百公里油耗endb;plotb,y,'+r'hold onb1=linspaceb1,b5,100;y1=splineb,y,b1; %三次样条插值plotb1,y1; %绘制燃油经济性-加速时间曲线title'燃油经济性—加速时间曲线';xlabel'百公里油耗L/100km';ylabel'加速时间s';gtext'i0=',gtext'i0=',gtext'i0=',gtext'i0=',gtext'i0=';子程序:1 function y=jiasushijiani0 %求加速时间的处理函数n1=linspace0,5000; %先求各个档位的驱动力nmax=4000;nmin=600;r=;yita=;CDA=;f=;G=3880;ig=,,,;%i0=for i=1:1:4 %i为档数uamaxi=chesunmax,r,igi,i0; %计算各个档位的最大速度与最小速度uamini=chesunmin,r,igi,i0;uai,:=linspaceuamini,uamaxi,100;ni,:=zhuansuuai,:,r,igi,i0; %计算各个档位的转速范围 Ttqi,:=zhuanjuni,:; %求出各档位的转矩范围 Fti,:=qudongliTtqi,:,igi,i0,yita,r; %求出驱动力Fi,:=fG+CDAuai,:.^2/; %求出滚动阻力和空气阻力的和deltai,:=1+++igi^2i0^2yita/3880r^2; %求转动质量换算系数ai,:=1./deltai,:.3880./Fti,:-Fi,:; %求出加速度F2i,:=Fti,:-Fi,:;end%下面分各个档位进行积分,求出加速时间temp11,:=ua2,:/;temp12,:=1./a2,:;n1=1;for j1=1:1:100if ua3,j1>maxua2,:&&ua3,j1<=70temp21,n1=ua3,j1/;temp22,n1=1./a3,j1;n1=n1+1;endendn2=1;for j1=1:1:100if ua4,j1>maxua3,:&&ua4,j1<=70;temp31,n2=ua4,j1/;temp32,n2=1./a4,j1;n2=n2+1;endendy=temp11,1temp12,1+qiujitemp11,:,temp12,:+qiujitemp21,:,temp22,:+qiuj itemp31,:,temp32,:;end2 function ua=chesun,r,ig,i0; %由转速计算车速ua=r.n/igi0;3 function n=zhuansuua,r,ig,i0; %求转速n=igi0.ua./r;end4 function y=zhuanjun; %求转矩函数y=+.n./1000.n./1000.^2+.n./1000.^.n./1000.^4;5 function y=qudongliTtq,ig,i0,yita,r; %求驱动力函数y=igi0yita.Ttq/r;end6 function p=qiujix0,y0 %求积分函数n0=sizex0;n=n02;x=linspacex01,x0n,200 ;y=splinex0,y0,x; %插值% figure;plotx,y;p=trapzx,y ;end7 %求不同i0下的六工况油耗function b=youhaoi0;global f G CDA yita m r If Iw1 Iw2 pg B0 B1 B2 B3 B4 n %声明全局变量ig=,,,;r=;yita=;CDA=;f=;%i0=;G=3880;If=;Iw1=;Iw2=;m=3880; %汽车的基本参数设定n0=815 1207 1614 2012 2603 3006 3403 3804;B00= ;B10= ;B20= ;B30= ;B40= ;n=600:1:4000;B0=splinen0,B00,n;B1=splinen0,B10,n;B2=splinen0,B20,n; %使用三次样条插值,保证曲线的光滑连续B3=splinen0,B30,n;B4=splinen0,B40,n;ua4=r.n./i0ig4; %求出发动机转速范围内对应的III、IV档车速F4=fG+CDAua4.^2/; %求出滚动阻力和空气阻力的和P_fw4=F4.ua4./yita1000; %求出阻力功率for i=1:1:3401 %用拟合公式求出各个燃油消耗率b4i=B0i+B1iP_fw4i+B2iP_fw4i^2+B3iP_fw4i^3+B4iP_fw4i^4;endpg=; %汽油的重度取Lua4_m=25,40,50; %匀速阶段的车速s_m=50,250,250; %每段匀速走过的距离b4_m=splineua4,b4,ua4_m; %插值得出对应速度的燃油消耗率F4_m=fG+CDAua4_m.^2/; %车速对应的阻力P_fw4_m=F4_m.ua4_m./yita1000; %发动机功率Q4_m=P_fw4_m.b4_m.s_m./102.ua4_m.pg ; Q4_a1=jiasu40,25,ig4,,ua4,i0; Q4_a2=jiasu50,40,ig4,,ua4,i0; Qid=;tid=;s=1075;Q_i=Qidtid; %求出减速阶段的燃油消耗量 Q4all=sumQ4_m+Q4_a1+Q4_a2+Q_i100/s; %IV 档六工况百公里燃油消耗量 b=Q4all;8加速阶段处理函数function q=jiasuumax,umin,ig,a,ua0,i0;global f G CDA yita m r If Iw1 Iw2 pg B0 B1 B2 B3 B4 n; %i0 ; ua1=umin:1:umax; %把速度范围以1km/h 为间隔进行划分 delta=1+Iw1+Iw2/mr^2+Ifig^2i0^2yita/mr^2;P0=Gf.ua0./3600+CDA.ua0.^3/76140+deltam.ua0/3600a/yita; P=Gf.ua1/3600+CDA.ua1.^3/76140+deltam.ua1/3600a/yita; dt=1/a ; %速度每增加1km/h 所需要的时间for i=1:1:3401 %重新利用拟合公式求出b 与ua 的关系 b0i=B0i+B1iP0i+B2iP0i^2+B3iP0i^3+B4iP0i^4; endb1=interp1ua0,b0,ua1; %插值出各个速度节点的燃油消耗率 Qt=P.b1./.pg; %求出各个速度节点的燃油消耗率 i1=sizeQt; i=i12;Qt1=Qt2:i-1;q=Qt1+Qtidt./2+sumQt1dt; %求该加速阶段的燃油消耗量2)求行驶车速Ua =30km/h,在ϕ=路面上车轮不抱死的制动距离;计算时取制动系反应时间'2τ=,制动减速度上升时间''2τ=;3)求制动系前部管路损坏时汽车的制动距离s,制动系后部管路损坏时汽车的制动距离's ; 解:Matlab 程序: (1) 求利用附着系数曲线和制动效率曲线程序: cleark=4080;hgk=;Lk=;ak=;betak=;bk=Lk-ak;%空载时的参数 mm=9290;hgm=;Lm=;am=;betam=;bm=Lm-am;%满载时的参数 z=0::; figure1; fai=z;fai_fk=betakzLk./bk+zhgk;%空载时前轴的φffai_fm=betamzLm./bm+zhgm;%满载时前轴的φffai_rk=1-betakzLk./ak-zhgk;%空载时后轴的φrfai_rm=1-betamzLm./am-zhgm;%满载时后轴的φrplotz,fai_fk,'b--',z,fai_fm,'r',z,fai_rk,'b--',z,fai_rm,'r',z,fai,' k';title'利用附着系数与制动强度的关系曲线';xlabel'制动强度z/g';ylabel'利用附着系数φ';gtext'φr空载',gtext'φr满载',gtext'φ=z',gtext'φf空载',gtext'φf 满载';figure2;Efk=z./fai_fk100;%空载时前轴的制动效率Efm=z./fai_fm100;Erk=z./fai_rk100;Erm=z./fai_rm100;plotfai_fk,Efk,'b',fai_fm,Efm,'r',fai_rk,Erk,'b',fai_rm,Erm,'r'; axis0 1 0 100;title'前.后制动效率曲线';xlabel'附着系数φ';ylabel'制动效率%';gtext'Ef',gtext'Er',gtext'Er',gtext'满载',gtext'空载';(2)问和3问程序:clearmk=4080;hgk=;Lk=;ak=;betak=;bk=Lk-ak;%空载时的参数mm=9290;hgm=;Lm=;am=;betam=;bm=Lm-am;%满载时的参数z=0::1;fai_fk=betakzLk./bk+zhgk;%空载时前轴的φffai_fm=betamzLm./bm+zhgm;%满载时前轴的φffai_rk=1-betakzLk./ak-zhgk;%空载时后轴的φrfai_rm=1-betamzLm./am-zhgm;%满载时后轴的φrEfk=z./fai_fk100;%空载时前轴的制动效率Efm=z./fai_fm100;Erk=z./fai_rk100;Erm=z./fai_rm100;t1=;t2=;ua0=30;fai=;g=;ak1=Erk81gfai/100;am1=Erm81gfai/100;Sk1=t1+t2/2ua0/+ua0^2/ak1;%制动距离Sm1=t1+t2/2ua0/+ua0^2/am1;disp'空载时,汽车制动距离Sk1=';dispSk1;disp'满载时,汽车制动距离Sm1=';dispSm1;ak2=faigak/Lk+faihgk; am2=faigam/Lm+faihgm; ak3=faigbk/Lk-faihgk; am3=faigbm/Lk-faihgm;Sk2=t1+t2/2ua0/+ua0^2/ak2;%制动距离 Sm2=t1+t2/2ua0/+ua0^2/am2; Sk3=t1+t2/2ua0/+ua0^2/ak3; Sm3=t1+t2/2ua0/+ua0^2/am3;disp'空载时,前制动器损坏,汽车制动距离Sk2='; dispSk2;disp'满载时,前制动器损坏,汽车制动距离Sm2='; dispSm2;disp'空载时,后制动器损坏,汽车制动距离Sk3='; dispSk3;disp'满载时,后制动器损坏,汽车制动距离Sm3='; dispSm3;空载时,汽车制动距离Sk1=满载时,汽车制动距离Sm1=空载时,前制动器损坏,汽车制动距离Sk2=满载时,前制动器损坏,汽车制动距离Sm2=空载时,后制动器损坏,汽车制动距离Sk3=满载时,后制动器损坏,汽车制动距离Sm3=二自由度轿车模型的有关参数如下:总质量 m=绕Oz 轴转动惯量 23885m kg I z ⋅= 轴距 L= 质心至前轴距离 a= 质心至后轴距离 b=前轮总侧偏刚度 k 1=-62618N/rad 后轮总侧偏刚度 k 2=-110185N/rad 转向系总传动比 i=20 试求:1) 稳定性因数K 、特征车速u ch ; 2) 稳态横摆角速度增益曲线asr u -⎪⎭⎫δω、车速u=s 时的转向灵敏度sw rδω;3) 静态储备系数.,侧向加速度为时的前、后轮侧偏角绝对值之差21αα-与转弯半径的比值R/R 0R 0=15m;4) 车速u=s 时,瞬态响应的横摆角速度波动的固有圆频率0ω、阻尼比ζ、反应时间τ与峰值反应时间ε解:Matlab 程序: m=;Iz=3885;L=;a=;b=;k1=-62618;k2=-110185; i=20;g=;R0=15;u1=; K=ma/k2-b/k1/L^2; Uch=1/K^1/2;%特征车速disp'稳定性因数s^2/m^2K='; dispK;disp'特征车速m/sUch='; dispUch; u=0::30;S=u./L1+Ku.^2;%稳态横摆角速度增益 plotu,S;title'汽车稳态横摆角速度增益曲线'; xlabel'车速um/s';ylabel'稳态横摆角速度增益'; disp'u=s 时,转向灵敏度为'; dispS448;SM=k2/k1+k2-a/L; ay=g; A=KayL; B=L/R0; R=L/B-A;C=R/R0;%转弯半径比 disp'静态储备系数.='; dispSM;disp'侧向加速度为时前、后轮侧偏角绝对值之差rad a1-a2='; dispA;disp'侧向加速度为时转弯半径比值R/R0='; dispC;W0=L/u1k1k2/mIz1+Ku1^2^1/2;%固有圆频率D=-mk1a^2+k2b^2-Izk1+k2/2LmIzk1k21+Ku1^2^1/2;%阻尼比 t=atan1-D^2^1/2/-mu1aW0/Lk2-D/W01-D^2^1/2;%反应时间 E=atan1-D^2^1/2/D/W01-D^2^1/2+t;%峰值反应时间 disp'车速u=s 时的瞬态响应参数分别为:'; disp'横摆角速度波动的固有圆频率rad 为 '; dispW0;disp'阻尼比为'; dispD;disp'反应时间s 为'; dispt;disp'峰值反应时间s 为'; dispE;稳定性因数s^2/m^2K=特征车速m/sUch=u=s 时,转向灵敏度为静态储备系数.=侧向加速度为时前、后轮侧偏角绝对值之差rad a1-a2=侧向加速度为时转弯半径比值R/R0=车速u=s 时的瞬态响应参数分别为: 横摆角速度波动的固有圆频率rad 为阻尼比为反应时间s 为峰值反应时间s 为车身-车轮双质量系统参数:10,9,25.0,5.10====μγζHz f ;“人体-座椅”系统参数:25.0,3==s s Hz f ζ;车速s m u /20=,路面不平度系数()3801056.2m n G q -⨯=,参考空间频率n 0=;计算时频率步长Hz f 2.0=∆,计算频率点数180=N ;1) 计算并画出幅频特性q z /1、12/z z 、2/z q 和均方根值谱()f G z 1 、()f G z 2 、()f G a 谱图;进一步计算aw w a zz q L a 、、、、、σσσσ21 值 2) 改变“人体-座椅”系统参数:5.0~125.0,6~5.1==s s Hz f ζ;分析aw w L a 、值随s s f ζ、的变化;3) 分别改变车身-车轮双质量系统参数:5.0~125.0,3~25.00==ζHz f ,20~5,18~5.4==μγ;绘制GFd fd z /2σσσ、、 三个响应量均方根值随以上四个系统参数变化的曲线; 解:Matlab 程序 1问yps=;%阻尼比ζ gama=9;%刚度比γ mu=10;%质量比μfs=3;ypss=;g=;a0=10^-6;f0=; ua=20;Gqn0=10^-8;n0=;detaf=;N=180; f=detaf0:N;lamta=f/f0;lamtas=f/fs;Wf=0f;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z1_q=gamasqrt1-lamta.^2.^2+4yps^2lamta.^2./deta;z2_z1=sqrt1+4yps^2lamta.^2./1-lamta.^2.^2+4yps^2lamta.^2; p_z2=sqrt1+2ypsslamtas.^2./1-lamtas.^2.^2+2ypsslamtas.^2; z2_q=gamasqrt1+4yps^2lamta.^2./deta; p_q=p_z2.z2_q;jfg_Gqddf=4pi^2sqrtGqn0n0^2uaf; jfg_Gzdd1f=z1_q.jfg_Gqddf; jfg_Gzdd2f=z2_q.jfg_Gqddf; jfg_Gaf=p_q.jfg_Gqddf;sigmaqdd=sqrttrapzf,jfg_Gqddf.^2;%路面不平度加速度均方根值 sigmazdd1=sqrttrapzf,jfg_Gzdd1f.^2;%车轮加速度均方根值 sigmazdd2=sqrttrapzf,jfg_Gzdd2f.^2;%车身加速度均方根值 sigmaa=sqrttrapzf,jfg_Gaf.^2;%人体加速度均方根值 for i=1:N+1 if fi<=2 Wfi=; elseif fi<=4 Wfi=fi/4; elseif fi<= Wfi=1; elseWfi=fi; end endkk=Wf.^2.jfg_Gaf.^2;aw=sqrttrapzf,kk;%加权加速度均方根值 Law=20log10aw/a0;%加权振级disp'路面不平度加速度均方根值为';dispsigmaqdd; disp'车轮加速度均方根值为';dispsigmazdd1; disp'车身加速度均方根值为';dispsigmazdd2; disp'人体加速度均方根值为';dispsigmaa;disp'加权加速度均方根值为';dispaw;disp'加权振级';dispLaw;figure1plotf,z1_q,title'幅频特性|z1/q|, f=, ζ=,γ=9,μ=10',xlabel'激振频率f/Hz',ylabel'|z1/q|';figure2plotf,z2_z1,title'幅频特性|z2/z1|,f=, ζ=,γ=9,μ=10',xlabel'激振频率f/Hz',ylabel'|z2/z1|';figure3plotf,p_z2,title'幅频特性|p/z2|,fs=, ζs=',xlabel'激振频率f/Hz',ylabel'|p/z2|';figure4plotf,jfg_Gzdd1f,title'车轮加速度均方根值√Gz1f谱图',xlabel'激振频率f/Hz',ylabel'√Gz1f';figure5plotf,jfg_Gzdd2f,title'车身加速度均方根值√Gz2f谱图',xlabel'激振频率f/Hz',ylabel'√Gz2f';figure6plotf,jfg_Gaf,title'人体加速度均方根值√Gaf谱图',xlabel'激振频率f/Hz',ylabel'√Gaf';路面不平度加速度均方根值为车轮加速度均方根值为车身加速度均方根值为人体加速度均方根值为加权加速度均方根值为加权振级2问程序1:cleargama=9;%刚度比γmu=10;%质量比μf0=;g=;a0=10^-6;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f=detaf0:N;lamta=f/f0;Wf=0f;for i=1:N+1if fi<=2Wfi=;elseif fi<=4Wfi=fi/4;elseif fi<=Wfi=1;elseWfi=fi;endendfs=3;ypss=;ypss0=::;a=0ypss0;La=0ypss0;M=lengthypss0;for i=1:Myps=ypss0i;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;p_z2=sqrt1+2ypsslamtas.^2./1-lamtas.^2.^2+2ypsslamtas.^2;z2_q=gamasqrt1+4yps^2lamta.^2./deta;p_q=p_z2.z2_q;jfg_Gqddf=4pi^2sqrtGqn0n0^2uaf;jfg_Gaf=p_q.jfg_Gqddf;kk=Wf.^2.jfg_Gaf.^2;awi=sqrttrapzf,kk;endLaw=20log10aw/a0;figure1plotypss0,aw;title'aw随ζs的变化',xlabel'“人体—座椅”系统的阻尼比ζs',ylabel'aw/ms^-2';figure2plotypss0,Law;title'Law随ζs的变化',xlabel'“人体—座椅”系统的阻尼比ζs',ylabel'Law/dB';程序2:clearyps=;%阻尼比ζgama=9;%刚度比γmu=10;%质量比μf0=;g=;a0=10^-6;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f=detaf0:N;lamta=f/f0;Wf=0f;for i=1:N+1if fi<=2Wfi=;elseif fi<=4Wfi=fi/4;elseif fi<=Wfi=1;elseWfi=fi;endendypss=;fs=::6;M=lengthfs;for i=1:Mfs0=fsi;lamtas=f/fs0;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;p_z2=sqrt1+2ypsslamtas.^2./1-lamtas.^2.^2+2ypsslamtas.^2;z2_q=gamasqrt1+4yps^2lamta.^2./deta;p_q=p_z2.z2_q;jfg_Gqddf=4pi^2sqrtGqn0n0^2uaf;jfg_Gaf=p_q.jfg_Gqddf;kk=Wf.^2.jfg_Gaf.^2;awi=sqrttrapzf,kk;endLaw=20log10aw/a0;figure3plotfs,aw;title'aw随fs的变化',xlabel'“人体—座椅”系统的固有频率fs',ylabel'aw/ms^-2';figure4plotfs,Law;title'Law随fs的变化',xlabel'“人体—座椅”系统的固有频率fs',ylabel'Law/dB';3问程序1:clearfigure1fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;gama=9;mu=10;ff0=::3;sigmaz2=0ff0;sigmafd=0ff0;sigmaFd_G=0ff0;M=lengthff0;for i=1:Mf0=ff0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if f0==sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotff0,sz2,'r-',ff0,sfd,'b-.',ff0,sFd_G,'k--';axis 3 -25 15;title'三个响应量均方根值随f0变化的曲线',xlabel'车身部分固有频率f0/Hz',ylabel'σz2/dB,σfd/dB,σFd/G/dB';程序2:clearfigure2fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;gama=9;mu=10;c= i=1:Myps=yps0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if yps==sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotyps0,sz2,'r-',yps0,sfd,'b-.',yps0,sFd_G,'k--';axis -4 4;title'三个响应量均方根值随ζ变化的曲线',xlabel'车身部分阻尼比ζ',ylabel'σz2/dB,σfd/dB,σFd/G/dB';程序3:clearfigure3fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;mu=10;gama0=4::19;sigmaz2=0gama0;sigmafd=0gama0;sigmaFd_G=0gama0;M=lengthgama0;for i=1:Mgama=gama0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if gama==9sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotgama0,sz2,'r-',gama0,sfd,'b-.',gama0,sFd_G,'k--';axis4 18 -5 6;title'三个响应量均方根值随γ变化的曲线',xlabel'悬架与轮胎的刚度比γ',ylabel'σz2/dB,σfd/dB,σFd/G/dB';程序4:clearfigure4fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;gama=9;mu0=5::20;sigmaz2=0mu0;sigmafd=0mu0;sigmaFd_G=0mu0;M=lengthmu0;for i=1:Mmu=mu0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if mu==10sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotmu0,sz2,'r-',mu0,sfd,'b-.',mu0,sFd_G,'k--';axis5 20 -2 2;title'三个响应量均方根值随μ变化的曲线',xlabel'车身与车轮部分质量比μ',ylabel'σz2/dB,σfd/dB,σFd/G/dB';。
运用MATLAB进行汽车制动系匹配设计
的下方,而为了提高制动效率,β 线应尽可能靠近 I线。
根据汽车理论,理想制动器制动力分配曲线方程为:
$ ! " #% F!2=
1 2
G hg
b2+
4hg L G
F!1
-
Gb hg
+2F!1
(1)
F!1—— —前制动器制动力; F!2—— —后制动器制动力; G— ——汽车重力;
b—— —汽车质心至后轴中心线距离;
明确以上整车质量参数后,计算制动系所用到质心到前、
后轴的距离等参数均可推算出来。整车质量参数的输入语句
如下:
clc
clear
M 1=1;
% 属于 M 1 类车辆填 1,否则填 0
N 1=0;
% 属于 N 1 类车辆填 1,否则填 0
O TH E R =0;
% 属于其它类车辆填 1,否则填 0
m a_k=1005;
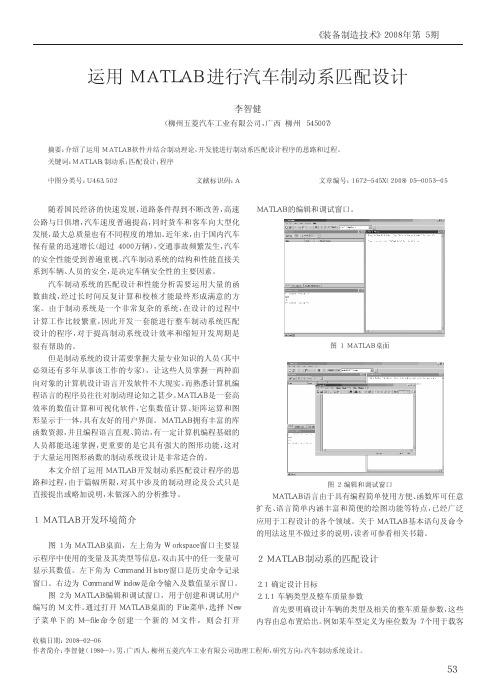
图 2 为 M A TLA B 编辑和调试窗口,用于创建和调试用户 编写的 M 文件。通过打开 M A TLA B 桌面的 File 菜单,选择 N ew 子菜单下 的 M -file 命 令 创 建 一 个 新 的 M 文 件 , 则 会 打 开
M A TLA B 的编辑和调试窗口。
图 1 MATLAB 桌面
图 2 编辑和调试窗口 M A TLA B 语言由于具有编程简单使用方便、函数库可任意 扩充、语言简单内涵丰富和简便的绘图功能等特点,已经广泛 应用于工程设计的各个领域。关于 M A TLA B 基本语句及命令 的用法这里不做过多的说明,读者可参看相关书籍。
2 MATLAB 制动系的匹配设计
2.1 确定设计目标 2.1.1 车辆类型及整车质量参数
Pw =9.31;
matlab制动理想分配曲线绘制

matlab制动理想分配曲线绘制(最新版)目录一、引言二、制动理想分配曲线的概述1.制动力的分配2.制动力分配的理想曲线三、MATLAB 在制动理想分配曲线绘制中的应用1.MATLAB 的基本介绍2.使用 MATLAB 绘制制动理想分配曲线的步骤四、结论正文一、引言在汽车设计中,制动系统的性能直接影响到行车安全。
理想的制动力分配能够提高制动效果,减少制动距离,提高车辆行驶的稳定性。
因此,研究制动理想分配曲线具有重要的实际意义。
二、制动理想分配曲线的概述1.制动力的分配汽车制动时,制动力需要在前后轮之间进行合理的分配,以便实现最佳的制动效果。
通常情况下,前轮制动力占总制动力的 60%~70%,后轮制动力占总制动力的 30%~40%。
2.制动力分配的理想曲线理想的制动力分配曲线应该是一条平滑的 S 型曲线。
该曲线要求在制动开始阶段,前轮制动力迅速增加,以便快速降低车速;随后,后轮制动力逐渐增加,以保证车辆行驶的稳定性。
三、MATLAB 在制动理想分配曲线绘制中的应用1.MATLAB 的基本介绍MATLAB 是一种广泛应用于科学计算、数据分析和可视化的编程语言。
它具有强大的数值计算和图形绘制功能,可以方便地解决工程技术中的各种问题。
2.使用 MATLAB 绘制制动理想分配曲线的步骤(1)首先,需要准备车辆的相关参数,包括车辆的总质量、前后轮的质量、制动系统的制动力矩等。
(2)其次,根据制动力的分配原则,编写 MATLAB 程序,计算在不同车速下,前后轮应该分配的制动力。
(3)最后,使用 MATLAB 的图形绘制功能,将计算得到的制动力分配曲线绘制出来。
四、结论通过对制动理想分配曲线的研究,可以优化汽车制动系统的性能,提高行车安全。
matlab制动理想分配曲线绘制

MATLAB制动理想分配曲线绘制在汽车工程领域中,制动系统是非常关键的一个部分,它直接关系到车辆的安全性能。
制动力的理想分配曲线是制动系统设计中的一个重要参数,它能够直观地反映出车辆制动性能的优劣。
对于工程师来说,了解和绘制制动理想分配曲线是必不可少的一项技能。
本文将介绍如何使用MATLAB绘制制动理想分配曲线,以实现对制动系统性能的优化分析。
1.理想分配曲线的概念理想分配曲线又称为刹车压力分配曲线,是车辆制动系统中一种重要的性能参数。
理想分配曲线是指车辆各个轮子上的刹车压力随车辆纵向加速度而变化的曲线。
在制动过程中,如果车辆前后轴上的制动力分配合理,能够有效地提高车辆的稳定性和安全性。
理想分配曲线可以直观地反映出车辆的制动性能和稳定性。
2.理想分配曲线的绘制原理理想分配曲线的绘制原理是根据车辆的纵向动力学特性和制动系统的性能参数。
在绘制理想分配曲线时,需要考虑车辆的重量、车辆的纵向惯性特性、车辆的悬挂特性、车辆制动系统的性能参数等因素。
在实际的制动系统设计中,根据车型设计、制动器性能、悬架性能等参数来确定车轮的制动力分配系数,绘制出刹车压力分配曲线,以达到最优化的刹车压力分配。
3.利用MATLAB绘制理想分配曲线MATLAB是一种功能强大的科学计算软件,能够进行复杂的数值计算和绘图。
使用MATLAB可以方便快捷地绘制出制动理想分配曲线。
下面将介绍具体的步骤:第一步:定义车辆的基本参数首先需要定义车辆的基本参数,包括车辆的质量、车辆的纵向惯性特性、车辆的悬挂特性、车辆制动系统的性能参数等。
第二步:建立理想分配曲线的数学模型根据车辆的基本参数,建立理想分配曲线的数学模型。
理想分配曲线的数学模型是一个包含多个变量的复杂方程,需要根据实际情况进行求解。
第三步:利用MATLAB进行数值计算利用MATLAB进行数值计算,求解出理想分配曲线的各个数据点。
MATLAB提供了丰富的数值计算函数和绘图函数,可以方便地进行数值计算和绘图。
基于MATLAB的车辆动力性和制动性仿真分析

基于MATLAB的车辆动力性和制动性仿真分析发布时间:2022-06-22T02:20:51.317Z 来源:《科学与技术》2022年2月4期(下)作者:邹彦冉张竹林* 蒋德飞阮帅房冠霖曹士杰[导读] 动力性和制动性是评价车辆性能的关键指标,在对关键部件进行定参数、零部件选型、匹配优化时需要进行大量计算邹彦冉张竹林* 蒋德飞阮帅房冠霖曹士杰山东交通学院汽车工程学院,山东济南 250357摘要:动力性和制动性是评价车辆性能的关键指标,在对关键部件进行定参数、零部件选型、匹配优化时需要进行大量计算,现在企业多采用EXCEL进行计算,导致效率低下、直观性不强。
本文基于MATLAB软件的App Designer模块,开发了车辆动力性和制动性仿真分析软件,具有良好的人机界面和曲线输出功能,并以某型号汽车的实际参数进行了动力性和制动性仿真验证,证明了软件仿真分析的可行性,能够为汽车设计提供良好的支撑,提高设计效率。
关键词:汽车;MATLAB;仿真分析;App Designer 中图分类号:U462.3 文献标志码:A 0 引言近年来国内外汽车行业发展迅猛,截至2021年7月,全国家用车保有量达3.84亿辆。
我国正由汽车制造大国往汽车制造强国过渡,汽车的正向研发技术越来越受到各汽车设计单位的重视。
车辆的动力性和制动性是评价车辆性能的关键指标之一[1],其性能的好坏影响到车辆的品质和市场。
如今国内外对App Designer在各领域的应用进行了研究[2],韦超毅[3]等采用App Designer对汽车的爬坡能力进行建模与仿真,开发设计了一款软件,测试了试验车的爬坡性能;张晓荣[4]等针对调节阀工作流量特性的畸变问题,设计了工作流量校正算法,并采用App Designer 开发了操作简单、功能完整的操作界面;李晶[5]等基于MATLAB对实际汽车进行动力性仿真,假设节气门开度处于最大情况下,通过仿真分析绘制出该工况下车辆动力性曲线并分析结合实际实验测量数据,验证了该仿真系统的准确性;陈利娜[6]使用MATLAB对汽车制动性能分析,获得了车辆制动力分配曲线,为汽车制动性仿真分析提供了准确的操作方法与可视化数据。
基于Matlab的汽车制动力分配比优化设计
基于Matlab的汽车制动力分配比优化设计汽车制动力分配比优化设计是汽车行业中极其重要的一项研究工作,它直接影响到车辆的行驶安全和驾驶体验。
Matlab是一款广泛应用于工程领域的数学软件,它能够提供完善的数学、统计和优化分析工具,适用于复杂的汽车制动力分析与设计。
在汽车制动力分配比优化设计中,Matlab可提供的工具有很多,如仿真分析、优化算法、流体动力学计算等。
通过Matlab的仿真分析工具,可以对不同制动力分配比方案进行建模仿真,从而评估其性能指标,如制动距离、制动力分布均匀度、制动力响应时间等。
同时,Matlab还可以利用一系列的优化算法,如遗传算法、模拟退火算法等,对不同方案的优化效果进行评估和比较。
此外,利用Matlab的流体动力学计算工具,可以对空气动力学参数进行优化计算,从而提升汽车制动性能。
汽车制动力分配比优化设计中还需要考虑到车辆悬挂系统、轮胎摩擦力等因素的影响。
Matlab可以提供车辆动力学模型的建立和模拟分析,从而实现多因素的优化设计。
此外,利用Matlab的机器学习工具,可以对大量的制动力数据进行处理和分析,从而提升汽车制动力分配比的优化预测精度。
通过不断地优化设计和仿真分析,可以使汽车的制动性能得到不断提升。
综上所述,Matlab是一款广泛应用于汽车制动力分配比优化设计中的数学软件,它可以提供完善的分析和优化工具,帮助工程师评估不同方案的性能和效果,从而优化汽车的制动性能,提高车辆行驶安全和驾驶体验。
汽车制动力分配比优化设计需要涉及到许多相关数据,如车辆重量、制动系统参数、轮胎规格、路面条件等。
下面对其中的几个数据进行分析。
首先,车辆重量是一个很重要的参数。
车辆重量越大,需要的制动力就越大,制动距离也越长。
因此,在制动力分配比的优化设计中,需要根据不同的车型和用途来选择合适的重量范围。
例如,在轿车的设计中,需要考虑到乘客数量和货物载重量等因素,从而选择合适的车身材料和结构设计,从而控制车辆重量。
03制动力分配曲线(空满载一起)-复制到Matlab
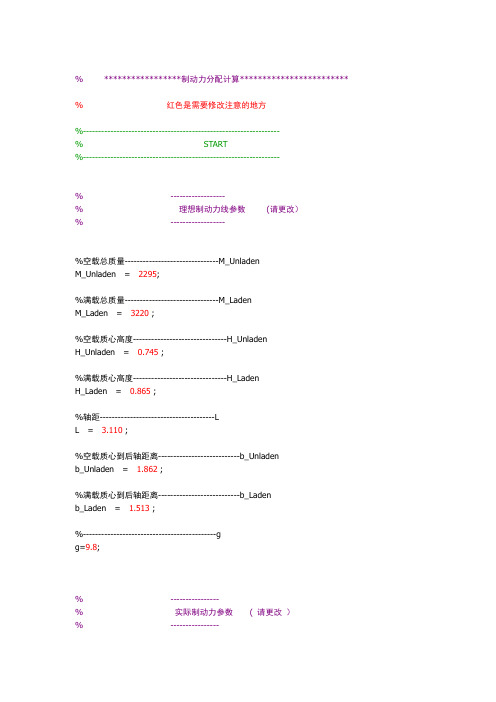
% *****************制动力分配计算************************ % 红色是需要修改注意的地方%-----------------------------------------------------------------% START%-----------------------------------------------------------------% ------------------% 理想制动力线参数(请更改)% ------------------%空载总质量-------------------------------M_UnladenM_Unladen = 2295;%满载总质量-------------------------------M_LadenM_Laden = 3220 ;%空载质心高度-------------------------------H_UnladenH_Unladen = 0.745 ;%满载质心高度-------------------------------H_LadenH_Laden = 0.865 ;%轴距--------------------------------------LL = 3.110 ;%空载质心到后轴距离---------------------------b_Unladenb_Unladen = 1.862 ;%满载质心到后轴距离---------------------------b_Ladenb_Laden = 1.513 ;%--------------------------------------------gg=9.8;% ----------------% 实际制动力参数( 请更改)% ----------------%后鼓式制动器效能因数--------------------------------BEF_Drug BEF_Drug = 2.4 ;%后制动器利用率EFF_R = 0.90 ;%前制动器利用率EFF_F = 0.95 ;%前盘式制动器效能因数--------------------------------BEF_Disk BEF_Disk = 0.76 ;%前盘式轮缸直径--------------------------------------D_Disk%单位-------- mD_Disk = 0.0678 ;%后鼓式轮缸直径--------------------------------------D_Drum%单位-------- mD_Drug = 0.0254;%前盘式制动器有效半径--------------------------------RE_Disk %单位-------- mRE_Disk = 0.125 ;%后鼓式制动器有效半径-------------------------------RE_Drug %单位-------- mRE_Drug = 0.135;%轮胎滚动半径--------------------------------------R_Roll%单位-------- mR_Roll = 0.339 ;%前轮缸液压损失------------------------------------PF_Loss%单位-------- PaPF_Loss = 0;%后轮缸液压损失------------------------------------PR_Loss%单位-------- PaPR_Loss = 0 ;% ---------------% 理想制动力计算(可能需要更改)% ---------------%BF_Unladen -----------------空载前制动力%BR_Unladen -----------------空载后制动力%BF_Laden -------------------满载前制动力%BR_Laden --------------------满载后制动力%根据实际的前后制动力情况,调整限值BF_Unladen = (0:10:30000) ;BF_Laden = (0:10:30000) ;BR_Unladen = (1/2)*((M_Unladen*g/H_Unladen)*((b_Unladen^2+4*H_Unladen*L*BF_Unladen/(M_Unlade n*g)).^(1/2))-(M_Unladen*g*b_Unladen/H_Unladen+2*BF_Unladen));BR_Laden = (1/2)*((M_Laden*g/H_Laden)*((b_Laden^2+4*H_Laden*L*BF_Laden/(M_Laden*g)).^(1/2)) -(M_Laden*g*b_Laden/H_Laden+2*BF_Laden));% ---------------% 实际制动力计算(可能需要更改)% ---------------%前盘系数J_Disk = EFF_F *2 * BEF_Disk * (pi/4) * D_Disk^2 * RE_Disk / R_Roll ;%后鼓系数J_Drug = EFF_R * 2 * BEF_Drug * (pi/4) * D_Drug^2 * RE_Drug / R_Roll ;%根据实际的前后制动力情况,调整限值%实际前制动力------------------------------------BF_FactBF_Fact = (0:10:30000) ;%实际后制动力------------------------------------BR_FactBR_Fact = BF_Fact * J_Drug / J_Disk - J_Drug *(PR_Loss - PF_Loss) ;% ---------------------% 画r线组--f线组% ---------------------FAI = (0.1:0.1:1);hold off;subplot(2,1,2);for j = 1:10%% ---- [x,y]=solve('(L - FAI * H_Laden ) * x / ( FAI * H_Laden ) - b_Laden * g * M_Laden / H_Laden = y ',...% '( FAI * g * M_Laden * ( L - b_Laden) ) / ( L + FAI * H_Laden) - (FAI * H_Laden ) * x / ( L + FAI * H_Laden ) = y ');%------------------ x = FAI*g*M_Laden*(FAI*H_Laden+b_Laden)/L%------------------ y =-FAI*g*M_Laden*(-L+FAI*H_Laden+b_Laden)/Lx = FAI(j)*g*M_Laden*(FAI(j)*H_Laden+b_Laden)/L;Fx1 = (0:10:x) ;F1_L = Fx1/( g * M_Laden );Fx2f_L = (L - FAI(j) * H_Laden ) * Fx1 / ( FAI(j) * H_Laden ) - b_Laden * g * M_Laden / H_Laden ;Fx2r_L = ( FAI(j) * g * M_Laden * ( L - b_Laden) ) / ( L + FAI(j) * H_Laden) - (FAI(j) * H_Laden ) * Fx1 / ( L + FAI(j) * H_Laden ) ;F2f_L = Fx2f_L / ( g * M_Laden );F2r_L = Fx2r_L / ( g * M_Laden );%------------画满载r-f曲线plot( F1_L,F2f_L,'b');hold on;plot( F1_L,F2r_L,'b');hold on;endsubplot(2,1,1);for i = 1:10%% ---- [x,y]=solve('(L - FAI * H_Laden ) * x / ( FAI * H_Laden ) - b_Laden * g * M_Laden / H_Laden = y ',...% '( FAI * g * M_Laden * ( L - b_Laden) ) / ( L + FAI * H_Laden) - (FAI * H_Laden ) * x / ( L + FAI * H_Laden ) = y ');%------------------ x = FAI*g*M_Laden*(FAI*H_Laden+b_Laden)/L%------------------ y =-FAI*g*M_Laden*(-L+FAI*H_Laden+b_Laden)/Lx = FAI(i)*g*M_Unladen*(FAI(i)*H_Unladen+b_Unladen)/L;Fx1 = (0:10:x) ;F1_U = Fx1/( g * M_Unladen );Fx2f_U = (L - FAI(i) * H_Unladen ) * Fx1 / ( FAI(i) * H_Unladen ) - b_Unladen * g * M_Unladen / H_Unladen ;Fx2r_U = ( FAI(i) * g * M_Unladen * ( L - b_Unladen) ) / ( L + FAI(i) * H_Unladen) - (FAI(i) * H_Unladen ) * Fx1 / ( L + FAI(i) * H_Unladen ) ;F2f_U = Fx2f_U / ( g * M_Unladen );F2r_U = Fx2r_U / ( g * M_Unladen );%------------画空载r-f曲线plot( F1_U,F2f_U,'b');hold on;plot( F1_U,F2r_U,'b');hold on;end% -------------% 画制动力曲线(不更改)% -------------%制动减速度decelerate = A%理想空载前轴提供给整车的减速度------ AF_Unladen %理想空载后轴提供给整车的减速度------ AR_Unladen %理想满载前轴提供给整车的减速度------ AF_Laden%理想满载后轴提供给整车的减速度------ AR_LadenAF_Unladen = BF_Unladen / ( M_Unladen * g);AR_Unladen = BR_Unladen / ( M_Unladen * g);AF_Laden = BF_Laden / ( M_Laden * g);AR_Laden = BR_Laden / ( M_Laden * g);%满载实际前轴提供给整车的减速度------- AF_Fact_L %满载实际后轴提供给整车的减速度------- AR_Fact_L %空载实际前轴提供给整车的减速度------- AF_Fact_Un %空载实际后轴提供给整车的减速度------- AR_Fact_UnAF_Fact_L = BF_Fact / ( M_Laden * g);AR_Fact_L = BR_Fact / ( M_Laden * g);AF_Fact_Un = BF_Fact / ( M_Unladen * g);AR_Fact_Un = BR_Fact / ( M_Unladen * g);%等地面制动力用参数x=(0:0.1:1);t =(0.1:0.1:1);%画制动力曲线hold on;subplot(2,1,1);plot(AF_Unladen,AR_Unladen ,'r','LineWidth',2);hold on;plot(AF_Fact_Un ,AR_Fact_Un ,'r');hold on;%画等地面制动力(等减速度)曲线for i = 1:10y= t(i) - x;plot(x,y,'k:');hold on ;endaxis([0 1 0 0.5]);title('空载前后制动力分配曲线');xlabel('前制动强度');ylabel('后制动强度');grid on;hold on ;subplot(2,1,2);plot(AF_Laden ,AR_Laden,'r','LineWidth',2);hold on;plot(AF_Fact_L ,AR_Fact_L,'r');hold on;%画等地面制动力(等减速度)曲线for i = 1:10y= t(i) - x;plot(x,y,'k:');hold on ;endaxis([0 1 0 0.5]);title('满载前后制动力分配曲线');xlabel('前制动强度');ylabel('后制动强度');grid on;%--------------------------------------------------------------- % END%---------------------------------------------------------------。
matlab制动理想分配曲线绘制
matlab制动理想分配曲线绘制一、Matlab制动理想分配曲线绘制简介制动理想分配曲线是汽车工程领域中一种重要的曲线,它反映了制动力在各轮之间的理想分配情况。
通过制动理想分配曲线,可以直观地分析车辆在制动过程中的稳定性和安全性。
Matlab作为一种强大的科学计算软件,可以方便地绘制制动理想分配曲线,为汽车工程师提供了一种有效的分析工具。
二、绘制制动理想分配曲线的具体步骤1.数据准备要绘制制动理想分配曲线,首先需要收集相关数据。
这些数据包括车轮的制动力、车速、车重等因素。
一般来说,这些数据可以通过实验测量得到,也可以从文献资料中查找。
在Matlab中,可以将这些数据存储为矩阵或向量,以便后续处理。
2.编写代码在Matlab中绘制制动理想分配曲线,需要编写相应的代码。
以下是一个简单的示例:```matlab% 输入数据F_brake = [100, 80, 60, 40]; % 车轮制动力v = [20, 30, 40, 50]; % 车速% 绘制制动理想分配曲线figure;plot(v, F_brake);xlabel("车速");ylabel("制动力");title("制动理想分配曲线");grid on;```3.图形绘制与优化在绘制制动理想分配曲线时,可以对图形进行一定的优化,以提高可读性和实用性。
例如,添加标题、轴标签、图例等。
此外,还可以调整图形的样式,如线型、颜色等。
4.制动理想分配曲线在工程实践中的应用制动理想分配曲线在工程实践中具有重要意义。
通过分析制动理想分配曲线,可以了解车辆在制动过程中的稳定性和安全性,为汽车设计和调试提供依据。
此外,制动理想分配曲线还可以用于评估车辆在不同工况下的制动性能,为汽车工程师优化制动系统提供参考。
三、总结与展望本文介绍了如何使用Matlab绘制制动理想分配曲线,重点阐述了数据准备、代码编写、图形绘制与优化等环节。