伺服电机知识培训(工程师培训)PPT
合集下载
伺服电机知识培训(工程师培训)
控制绕组
励磁绕组
电气原理图
3 旋转磁场作用下的运行分析
3.1旋转磁场的产生
同时,又假定通入励磁 绕组的电流Uf与通入控
ic Im sint
if Im sint 90
if Ic
制绕组的电流UC相位上
彼此相差900幅值彼此相
等,这样的两个电流称
为两相对称电流,用数
学式表示为
3.1旋转磁场的产生
相互作用产生电磁力,这个电磁力F作用在转子上,并对转轴形
成电磁转矩。根据左手定则,转矩方向与磁铁转动的方向是一 致的,也是顺时针方向。因此,鼠笼转子便在电磁转矩作用下 顺着磁铁旋转的方向转动起来。
3 旋转磁场作用下的运行分析 3.1伺服电机旋转磁场的产生
为了分析方便,先假定 励磁绕组有效匝数Uf与 控制绕组有效匝数UC相 等。这种在空间上互差 900电角度,有效匝数又 相等的两个绕组称为对 称两相绕组。
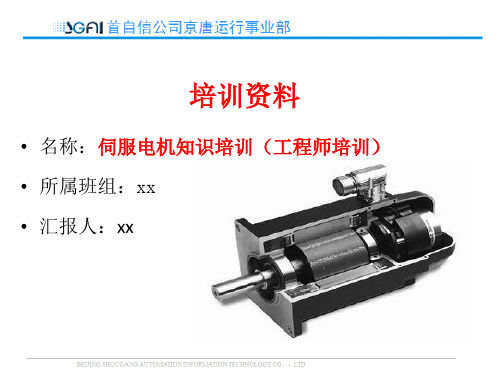
培训资料
• 名称:伺服电机知识培训(工程师培训) • 所属班组:xx • 汇报人:xx
伺服电机知识培训
一.伺服电机基本知识
伺服来自英文单词Servo,指系统跟随外部指令进行人们
所期望的运动,运动要素包括位置、速度和力矩。
最常见的伺服是交流永磁同步伺服电机, 伺服电机内部 的转子是永磁铁,驱动器控制的U/V/W三相电在定子中形成 变化的电磁场,转子在此磁场的作用下转动,同时电机自带 的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进 行比较,调整转子转动的角度。伺服电机的精度决定于编码 器的精度(线数)。最常见的是2500线标准编码器配置的伺 服电机。
表示的是一台两极的电机,即极对数P=1。对两极电机而言,
电流每变化一个周期,磁场旋转一圈,因而当
伺服电机教学PPT教学PPT学习教案
第21页/共42页
伺服电动机—4.交流永磁伺服系统
交流永磁伺服系统的矢量控制
◎与系统中的电机相对应,永磁交流伺服系统可分为永磁方波交流伺服 系统和永磁正弦波交流伺服系统。 ◎作为伺服电动机,系统要求电机的电磁转矩与输入转矩指令信号必须 是线性关系,通过矢量控制可以得到交流永磁电机的这种线性关系数学 模型。 1)向量(矢量)控制实际上是对电动机定子电流向量相位和幅值的控制 。可采用的控制方法有多种,其中Id=0的控制最为简单,且调速性能好。 2)当永磁体的励磁磁链和直、交轴电感确定后,电机的转矩就取决于定 子电流的空间向量Is,而Is的大小和相位又取决于Id和iq,也就是说控制Id和 iq便可以控制电动机的转矩。一定的转速和转矩对应于一定的I'd和I'q,通 过这两个电流的控制,使实际的Id和iq跟踪指令值I'd和I'q ,便实现了电动 机的转矩和转速控制。
第11页/共42页
伺服电动机—3.交流异步伺服电动机
控制方式
2)相位控制:保 持控制电压的幅值 不变,通过调节控 制电压的相位,即 改变控制电压相对 励磁电压的相位角 ,实现对电机的控 制。
第12页/共42页
伺服电动机—3.交流异步伺服电动机
控制方式
3)幅值-相位控制(或称电 容控制):将励磁绕组串联 电容C后,接到励磁电源上 ,调节控制电压的幅值来改 变电动机的转速时,由于转 子绕组的耦合作用,励磁回 路中的电流If也发生变化, 使Uf及Uca也随之改变。也 就是说,控制电压Uc和Uf 的大小及它们之间的相位角 也都跟着改变。是一种较常 用的控制方式。
伺服电动机—3.交流异步伺服电动机
机械特性和调节特性
信号系数α=Uc/Uf=Uc/U1;从图中看出,幅值控制时异步伺服电动机的 机械特性是一组曲线。只有当有效信号系数αe=1,即圆形旋转磁场时,异 步伺服电动机的理想空载转速才是同步转速。当有效信号系数αe≠1,即 椭圆形旋转磁场时,电机的理想空载转速将低于同步转速。
伺服电动机—4.交流永磁伺服系统
交流永磁伺服系统的矢量控制
◎与系统中的电机相对应,永磁交流伺服系统可分为永磁方波交流伺服 系统和永磁正弦波交流伺服系统。 ◎作为伺服电动机,系统要求电机的电磁转矩与输入转矩指令信号必须 是线性关系,通过矢量控制可以得到交流永磁电机的这种线性关系数学 模型。 1)向量(矢量)控制实际上是对电动机定子电流向量相位和幅值的控制 。可采用的控制方法有多种,其中Id=0的控制最为简单,且调速性能好。 2)当永磁体的励磁磁链和直、交轴电感确定后,电机的转矩就取决于定 子电流的空间向量Is,而Is的大小和相位又取决于Id和iq,也就是说控制Id和 iq便可以控制电动机的转矩。一定的转速和转矩对应于一定的I'd和I'q,通 过这两个电流的控制,使实际的Id和iq跟踪指令值I'd和I'q ,便实现了电动 机的转矩和转速控制。
第11页/共42页
伺服电动机—3.交流异步伺服电动机
控制方式
2)相位控制:保 持控制电压的幅值 不变,通过调节控 制电压的相位,即 改变控制电压相对 励磁电压的相位角 ,实现对电机的控 制。
第12页/共42页
伺服电动机—3.交流异步伺服电动机
控制方式
3)幅值-相位控制(或称电 容控制):将励磁绕组串联 电容C后,接到励磁电源上 ,调节控制电压的幅值来改 变电动机的转速时,由于转 子绕组的耦合作用,励磁回 路中的电流If也发生变化, 使Uf及Uca也随之改变。也 就是说,控制电压Uc和Uf 的大小及它们之间的相位角 也都跟着改变。是一种较常 用的控制方式。
伺服电动机—3.交流异步伺服电动机
机械特性和调节特性
信号系数α=Uc/Uf=Uc/U1;从图中看出,幅值控制时异步伺服电动机的 机械特性是一组曲线。只有当有效信号系数αe=1,即圆形旋转磁场时,异 步伺服电动机的理想空载转速才是同步转速。当有效信号系数αe≠1,即 椭圆形旋转磁场时,电机的理想空载转速将低于同步转速。
伺服电动机PPT课件
23
伺服电动机
怎样消除“自转”现象?
.
24
伺服电动机
当控制电压UC=0,只有励磁电压Uf时, 在单个绕组中通入交流电流产生的单相脉 动磁场可分为两个大小相等、方向相反的 旋转磁场,正向旋转磁场对转子产生拖动 转矩T+,反向旋转磁场对转子产生制动转 矩T-。当增大转子电阻,使sm≥1时,其合 成转矩T在电动机工作状态时成为负值,即 当控制电压消失后,处于单相运行的电动 机由于电磁转矩为制动性质。当电动机正 转时失去控制电压,产生的总转矩T为负 (0<s< 1);而反转时失去控制电压,
变,能在宽广的范围内连续调节。
(2)转子的惯性小,即能实现迅速起动、停转。
(3)控制功率小,过载能力强,可靠性好。
(4)无“自转”现象,伺服电动机在控制电压消失后,
应立即停转;
.
8
伺服电动机
伺服电动机典型生产厂家 德国西门子,产品外形有:
伺服电机
伺服电机驱动器
.
9
伺服电动机
日本松下及安川,产品外形有:
控制电机主要用于自动控制系统和计算装置中,着重于特 性的精度和对控制信号的快速响应等。
普通电机主要用于电力拖动系统中,用来完成机电能量的 转换,着重于启动和运转状态能力指标的要求。
.
3
伺服电动机
控制电机的特点
1.控制电机在自动控制系统和计算装置中作为执行元件、 检测元件和解算元件。
2.控制电机的输出功率较小,一般从数百豪瓦到数百瓦。
控制电机的应用
控制电机在现代工业自动控制系统、现代科学技术和军事 装备中是必不可少的重要设备。如在数控机床、火炮和雷达的 自动定位、飞机的自动驾驶以及医疗等方面都有广泛的应用。
伺服系统专业知识讲座培训课件
1)进给伺服系统的调速要求 数控机床中,进给伺服系统的调速范围与伺服系统的
分辨率有关。 一般的调速范围要求在脉冲当量为0.001mm时达到0~
24000mm/min。
进给伺服系统的调速可分为以下几种: ①在1-24000mm/min范围,要求速度均匀、稳定、无爬行、
速降小。 ②在1mm/min以下时,具有一定的瞬时速度,而平均速度很
这一方面要求过渡过程时间要短,一般在200ms以内,甚 至小于几十毫秒;另一方面要求超调要小。
(4)调速范围宽
调速范围RN指生产机械要求电机能提供的最高转速nmax 和最低转速nmin之比:
RN
nmax nmin
通常,nmax和nmin一般对指额定负载时的转速,对于少 数负载很轻的机械,也可以是实际负载的转速。
例:一个三相步进电机(A、B、C三相绕组) 通电顺序为:A → AB → B → BC → C → CA → ……,
逆时针旋转。 通电顺序为:A → CA → C → BC → B → AB → ……,
顺时针旋转。
上述通电方式也称为三相单双六拍通电方式。其步距角减 少一半。
4.2.3 步进电机的主要特性参数
测量及反馈
系统的误差补偿,可获得很高的位置控制
伺服系统专业精知度识讲,座培系训统课件的稳定性易得到保证。
4.1 概述
4.1.4、数控机床伺服系统的分类
☆全闭环控制系统
x
伺服 伺服
CNC 驱动 电机
n
转速n测
量及反馈
直线位移x测量及反馈
位置检测装置安装在工作台上,直接反映工作台的直线 位移,位置控制精度比半闭环高,控制原理同半闭环。 由于受导轨摩擦系数、传动的润滑状况,传动间隙大小 等因素的影响,系统的稳定性不如半闭环。
Adtech伺服培训课件

编码器分辨率(F) 每转脉冲数(f) 脉冲当量(p)
上位机发出一个脉冲时,丝杠移动的直线距离,也是上位机 所能控制的最小距离。
螺距(d)
螺纹上相邻两牙对应点之间的轴向距离。
让我们再来了解一下驱动器的工作流程 刚性的调整
位置指令脉冲
位置环
电 流 反 馈
参数保存
按“Enter”键三秒钟,参数将写入 在显示“参数”状态,按“Mode” 内部EEPROM中,写入完后显示 键进入“参数写入”状态 “END”
参数设置流程
进入“参数”状态
三相AC220V
建议使用隔离变压器
QS6AA015M/030M/050M CN1信号接线图
QS6AA050M3 CN3信号接线
输入输出接口说明
开关量SRDY、ALM、BRAKE、COIN、OZ输出接口 开关量EN、MODE、INTH、CW、CCW输入接口
1)外部电源由用户提供,但是必需注意,如果电源的极性接反,会使伺服驱 动器损坏。 2)输出为集电极开路形式,OZ、SRDY、COIN和ALM信号最大电流为20mA, BRAKE信号最大电流为50mA,所以BRAKE可以直接驱动继电器,而OZ、SRDY、 COIN和ALM信号不能驱动继电器;外部电源最大电压25V。因此,开关量输出 信号的负载必须满足这个限定要求。如果超过限定要求或输出直接与电源连 接,会使伺服驱动器损坏。 1)、由用户提供外部电源,DC12~24V,电流≥100mA。 3)如果负载是继电器等电感性负载,必须在负载两端反并联续流二极管。如 2)、注意,如果电流极性接反,会使伺服驱动器不能正常工作。 果续流二极管接反,会使伺服驱动器损坏。
交流伺服电机的机械特性及控制方式PPT

互作用产生电磁力,这个电磁力F作用在转子上,并对转
轴形成电磁转矩。根据左手定则,转矩方向与磁铁转动的 方向是一致的,也是顺时针方向。因此,鼠笼转子便在电 磁转矩作用下顺着磁铁旋转的方向转动起来。
励磁绕组 控制绕组
电气原理图
ic I m sin t
if I m sin t 90
if Ic
南京埃斯顿 太仓东元
国内重要伺服系统生产企业
5、卧龙电气集团股份有限公司 公司,前身是成立于1995年的浙江 卧龙集团电机工业有限公司。1998 年变更设立为浙江卧龙电机股份有 限公司。
6、北京和利时电机技术有限公 司,位于江苏省苏州市太仓市浏河 镇闸南工业区。
卧龙电气
北京和利时
国外重要伺服系统生产企业 产品进入我国市场的国外重要伺服系统生产企业有:
(1)调速范围宽广。伺服电动机的转速随着控制电 压改变,能在宽广的范围内连续调节。 (2)转子的惯性小,即能实现迅速启动、停转。 (3)控制功率小,过载能力强,可靠性好。
1.4 伺服电机在自控制系统中的典型应用
其它场合的应用
国内重要伺服系统生产企业
1、广州数控设备有限公司公司,创 建于1991年,位于广州市罗冲围螺涌北 路一街7号。
C B
A
伺服电动机的机械特性
设电机的负载阻转矩为TL,控制电压 0.25UC时,电机在特性点A运行,转速为na,这 时电机产生的转矩与负载阻转矩相平衡。当 控制电压升高到0.5UC时,电机产生的转矩就 随之增加C,由于电机的转子及其负载存在着 惯性,转速不能瞬时改变,因此电机就要瞬 时地在特性点C运行,这时电机产生的转矩大 于负载阻转矩,电机就加速,一直增加到nb, 电机就在B点运行。
德国西门子伺服电机 安川伺服电机驱动器
轴形成电磁转矩。根据左手定则,转矩方向与磁铁转动的 方向是一致的,也是顺时针方向。因此,鼠笼转子便在电 磁转矩作用下顺着磁铁旋转的方向转动起来。
励磁绕组 控制绕组
电气原理图
ic I m sin t
if I m sin t 90
if Ic
南京埃斯顿 太仓东元
国内重要伺服系统生产企业
5、卧龙电气集团股份有限公司 公司,前身是成立于1995年的浙江 卧龙集团电机工业有限公司。1998 年变更设立为浙江卧龙电机股份有 限公司。
6、北京和利时电机技术有限公 司,位于江苏省苏州市太仓市浏河 镇闸南工业区。
卧龙电气
北京和利时
国外重要伺服系统生产企业 产品进入我国市场的国外重要伺服系统生产企业有:
(1)调速范围宽广。伺服电动机的转速随着控制电 压改变,能在宽广的范围内连续调节。 (2)转子的惯性小,即能实现迅速启动、停转。 (3)控制功率小,过载能力强,可靠性好。
1.4 伺服电机在自控制系统中的典型应用
其它场合的应用
国内重要伺服系统生产企业
1、广州数控设备有限公司公司,创 建于1991年,位于广州市罗冲围螺涌北 路一街7号。
C B
A
伺服电动机的机械特性
设电机的负载阻转矩为TL,控制电压 0.25UC时,电机在特性点A运行,转速为na,这 时电机产生的转矩与负载阻转矩相平衡。当 控制电压升高到0.5UC时,电机产生的转矩就 随之增加C,由于电机的转子及其负载存在着 惯性,转速不能瞬时改变,因此电机就要瞬 时地在特性点C运行,这时电机产生的转矩大 于负载阻转矩,电机就加速,一直增加到nb, 电机就在B点运行。
德国西门子伺服电机 安川伺服电机驱动器
伺服电机培训课件(PPT 39张)
Pr1.09第二转矩滤波 ↓
3.转矩控制的基本参数调节
参数号 Pr0.01 Pr3.18 Pr3.19 Pr3.20 Pr0.11 Pr3.21
参考值 2 用户指定 用户指定 用户指定 用户指定 用户设置
备注 控制方式选择,固定为“2” 转矩指令选择 转矩指令增益,单位 (×0.1V/100%) 电机旋转逻辑取反, 反馈脉冲数 转矩模式速度限制
速度前馈(speed feedforward)的效果:速度(speed)观测
【实时自动调整流程图】
实行实时自动调整的情况下, 右图表示调整流量。 是 运转是否 实时自动调整这一功能,可 结束 正常? 以进行自动增益切换,自动 设定位置环路增益,速度环 路增益,速度环路积分时间 分析频率(FFT) 把握共振特性 常数、速度观测滤波器、转 矩滤波器、前馈速度,惯量 比等个调整参数,不能更改 ①把握速度环增益的范围 。 ②把握共振点,根据需要使用 按照操作手册进行调整时, 陷波滤波器 需要设定实时自动调整功能 为无效。 出现共振现象时 要求更短的整定时间时
举一个简单例子:有一台机械,是用伺服电机通过V形带传动一个恒定速 度、大惯性的负载。整个系统需要获得恒定的速度和较快的响应特性,分 析其动作过程: 当驱动器将电流送到电机时,电机立即产生扭矩;一开始,由于V形带 会有弹性,负载不会加速到象电机那样快;伺服电机会比负载提前到达设 定的速度,此时装在电机上的偏码器会削弱电流,继而削弱扭矩; 随着V 型带张力的不断增加会使电机速度变慢,此时驱动器又会去增加电流,周 而复始。 在此例中,系统是振荡的,电机扭矩是波动的,负载速度也随之波动。其 结果当然会是噪音、磨损、不稳定了。不过,这都不是由伺服电机引起的, 这种噪声和不稳定性,是来源于机械传动装置,是由于伺服系统反应速度 (高)与机械传递或者反应时间(较长)不相匹配而引起的,即伺服电机响 应快于系统调整新的扭矩所需的时间。 找到了问题根源所在,再来解决当然就容易多了,针对以上例子,您可以: (1)增加机械刚性和降低系统的惯性,减少机械传动部位的响应时间, 如把V形带更换成直接丝杆传动或用齿轮箱代替V型带。(2)降低伺服系 统的响应速度,减少伺服系统的控制带宽,如降低伺服系统的增益参数值。 (3)设置滤波器,陷波等。
伺服系统培训课件
伺服系统培训课件
第三节 位置检测装置
伺服系统培训课件
第三节 位置检测装置
一、位置检测装置的维护 1.光栅 • 透射光栅与反射光栅 • 光栅输出信号:二个相位和一个零标志 • 维护注意点
防污(冷却液轻微结晶、水雾、通入低压 压缩空气、无水酒精轻檫) 防振(不能敲击避免光学元件损坏)
伺服系统培训课件
第一节 主轴驱动系统 • 一般主轴要求:速度大范围连续可调、恒
功率范围宽 • 伺服主轴要求:有进给控制和位置控制 • 主轴变速形式:电动机带齿轮换档(降速、
增大传动比、增大主轴转矩);电动机通 过同步齿带或皮带驱动主轴(恒功率、机 械传动简单)
伺服系统培训课件
第六章 伺服系统故障诊断
一、常用主轴驱动系统介绍 • FANUC公司主轴驱动系统
• 主轴电动机不转:CNC是否有速度信号输
出;使能信号是否接通、CTR观察I/O状态、
分析PLC梯形图以确定主轴的启动条件
(润滑、冷却);主轴驱动故障;主轴电
机故障
伺服系统培训课件
第六章 伺服系统故障诊断
三、主轴直流驱动的故障诊断 1.控制电路
控制回路采用电流反馈和速度反馈的双闭 环调速系统,内环是电流环,外环是速度 环。 调速特点是速度环的输出是电流环的输入, 可以根据速度指令电压和转速反馈电压的 差值及时控制电动机的转矩。在速度差值 大时,转矩大,速度变化快,转速尽快达 到给定值,当转速伺服接系统近培训课给件 定值时,转矩自
伺服系统培训课件
第六章 伺服系统故障诊断
四、主轴交流驱动的故障诊断 (一)6SC650系列主轴交流驱动系统 1.驱动装置的组成(原理图)
伺服系统培训课件
第六章 伺服系统故障诊断
• 1.驱动装置的组成(主轴驱动系统)
第三节 位置检测装置
伺服系统培训课件
第三节 位置检测装置
一、位置检测装置的维护 1.光栅 • 透射光栅与反射光栅 • 光栅输出信号:二个相位和一个零标志 • 维护注意点
防污(冷却液轻微结晶、水雾、通入低压 压缩空气、无水酒精轻檫) 防振(不能敲击避免光学元件损坏)
伺服系统培训课件
第一节 主轴驱动系统 • 一般主轴要求:速度大范围连续可调、恒
功率范围宽 • 伺服主轴要求:有进给控制和位置控制 • 主轴变速形式:电动机带齿轮换档(降速、
增大传动比、增大主轴转矩);电动机通 过同步齿带或皮带驱动主轴(恒功率、机 械传动简单)
伺服系统培训课件
第六章 伺服系统故障诊断
一、常用主轴驱动系统介绍 • FANUC公司主轴驱动系统
• 主轴电动机不转:CNC是否有速度信号输
出;使能信号是否接通、CTR观察I/O状态、
分析PLC梯形图以确定主轴的启动条件
(润滑、冷却);主轴驱动故障;主轴电
机故障
伺服系统培训课件
第六章 伺服系统故障诊断
三、主轴直流驱动的故障诊断 1.控制电路
控制回路采用电流反馈和速度反馈的双闭 环调速系统,内环是电流环,外环是速度 环。 调速特点是速度环的输出是电流环的输入, 可以根据速度指令电压和转速反馈电压的 差值及时控制电动机的转矩。在速度差值 大时,转矩大,速度变化快,转速尽快达 到给定值,当转速伺服接系统近培训课给件 定值时,转矩自
伺服系统培训课件
第六章 伺服系统故障诊断
四、主轴交流驱动的故障诊断 (一)6SC650系列主轴交流驱动系统 1.驱动装置的组成(原理图)
伺服系统培训课件
第六章 伺服系统故障诊断
• 1.驱动装置的组成(主轴驱动系统)
伺服电机应用(工程师培训)
此类控制相对感应型(IM)简单、容易。
1)交流永磁同步伺服电机(SM)性能
控制响应性能最优,主要自动化系统执行器 控制,市面上伺服电机多为永磁同步电机。
●控制速度非常快(3-5ms →启动到额定转速) ●启动扭矩大,可驱动大惯量负荷 ●功率密度大,利于小型、轻型 ●结构简单、功率因素高 ●运行平稳,且支持长时间低速转动 ●主要以脉冲量输入
电机自带的编码器采集运行状态的反馈信号, 驱动器比较反馈与目标值差额进行角度修正。
伺服电机精度: 编码器精度(线数)。
相关基础知识:
●主磁通:经过转子的定子磁力线,能在旋转的 电枢绕组中感应电动势和电磁场。
●漏磁通:定子发出的不经过转子的闭合磁力线,
这部分磁通量不做有效功。
●气隙:定子与转子之间的间隙。
自带编码器采集运行状态信号,编码器线数 决定了执行电机控制精度。
由于气隙磁场难以直接检验,通常用转子位 置和速度的等效(矢量)控制实现。
常用的三种控制方式:
力矩控制:按设定电机输出扭矩 位置控制:按输入脉冲频率、频数 速度模式控制:外部输入模拟量或脉冲频数
1)转矩控制模式(模拟量输出)
外部模拟量的输入设定电机轴对外的输出转 矩的大小,适用于严格控制输出扭矩场合。
信号输入后产生磁场叠加,形成驱动力矩。
(2)同步型(SM)电机性能及应用
交流同步伺服电机内部的转子是永磁铁,驱 动器及控制方式与直流无刷电机类似。
控制器发出U/V/W三相交流电,依次接通定子 绕组形成旋转磁场,转子在磁场作用下转动。 同步型转子结构:永磁体
电机自带编码器,实时反馈信号;执行精度 决定于编码器精度(线数)。
大功率输出
精密丝杠组件
(1)控制精度需求
1)交流永磁同步伺服电机(SM)性能
控制响应性能最优,主要自动化系统执行器 控制,市面上伺服电机多为永磁同步电机。
●控制速度非常快(3-5ms →启动到额定转速) ●启动扭矩大,可驱动大惯量负荷 ●功率密度大,利于小型、轻型 ●结构简单、功率因素高 ●运行平稳,且支持长时间低速转动 ●主要以脉冲量输入
电机自带的编码器采集运行状态的反馈信号, 驱动器比较反馈与目标值差额进行角度修正。
伺服电机精度: 编码器精度(线数)。
相关基础知识:
●主磁通:经过转子的定子磁力线,能在旋转的 电枢绕组中感应电动势和电磁场。
●漏磁通:定子发出的不经过转子的闭合磁力线,
这部分磁通量不做有效功。
●气隙:定子与转子之间的间隙。
自带编码器采集运行状态信号,编码器线数 决定了执行电机控制精度。
由于气隙磁场难以直接检验,通常用转子位 置和速度的等效(矢量)控制实现。
常用的三种控制方式:
力矩控制:按设定电机输出扭矩 位置控制:按输入脉冲频率、频数 速度模式控制:外部输入模拟量或脉冲频数
1)转矩控制模式(模拟量输出)
外部模拟量的输入设定电机轴对外的输出转 矩的大小,适用于严格控制输出扭矩场合。
信号输入后产生磁场叠加,形成驱动力矩。
(2)同步型(SM)电机性能及应用
交流同步伺服电机内部的转子是永磁铁,驱 动器及控制方式与直流无刷电机类似。
控制器发出U/V/W三相交流电,依次接通定子 绕组形成旋转磁场,转子在磁场作用下转动。 同步型转子结构:永磁体
电机自带编码器,实时反馈信号;执行精度 决定于编码器精度(线数)。
大功率输出
精密丝杠组件
(1)控制精度需求
伺服电机工作原理图PPT
伺服电机工作原理图PPT
伺服电机是一种具有高精度、高速度和高扭矩的电机,常用于需要精确控制位置、速度和转矩的应用。
伺服电机通过内部的反馈系统不断检测输出轴位置,并根据这些信息调整控制信号,以使输出轴达到期望位置。
下面将介绍伺服电机的工作原理图PPT。
1. 电机结构
伺服电机的主要结构包括电机本体、编码器、控制器和电源部分。
电机本体通过电源输入产生转矩输出,编码器用于检测电机输出轴位置,控制器根据编码器反馈信号和控制输入信号生成驱动电流,从而控制电机旋转。
2. 工作原理
伺服电机的工作原理是通过控制器不断调整电机驱动电流,使得电机输出轴位置和速度与期望值保持一致。
控制器根据编码器反馈信息与设定值的误差,采用比例-积分-微分(PID)控制算法计算控制信号,调整电机输出。
这种反馈控制方式能够实现高精度的位置控制。
3. 工作原理图PPT
伺服电机工作原理图PPT通常包括电机结构示意图、PID控制原理图、控制信号流程图等内容。
通过PPT展示,可以清楚地展示伺服电机的工作原理和控制过程,便于理解和学习。
4. 应用领域
伺服电机广泛应用于数控机床、机器人、飞行器、医疗设备等领域,以满足对位置精度和速度控制精度要求较高的应用。
通过PPT展示伺服电机工作原理,可以帮助工程师和学生更好地理解伺服电机的工作原理和应用。
结语
伺服电机是一种高性能的电机,其工作原理基于精确的位置控制和反馈调节。
通过PPT展示伺服电机的工作原理图,可以帮助人们更好地理解伺服电机的工作原理和应用。
希望本文对您有所帮助。
以上是关于伺服电机工作原理图PPT的介绨,谢谢阅读!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 目前电机控制,主要是基于芯片控制、高速传输 技术为基础的反馈控制系统。
• 电机控制技术,已经逐步实现直驱控制。像安川 已经推出配套驱动器的直驱电机。
1.2伺服电机最大特点
在有控制信号输入时,伺服电动机就转动;没 有控制信号输入,它就停止转动。改变控制电压的 大小和相位(或极性)就可改变伺服电动机的转速和 转向。
信号时的机械特性,所谓零信号,就是控制电压UC=0,这时 磁场是脉振磁场,它可以分解为幅值相等、转向相反的两个圆
形旋转磁场,其作用可以想象为有两对相同大小的磁铁N—S 和N—S在空间以相反方向旋转。
当电阻已增大到使临界转差率>1的程度时,合成转矩曲线与横 轴相交仅有一点(S=1处),而且在电机运行范围内,合成转矩
控制绕组 励磁绕组
UF1
UC1
UC2
UF2
当两相对称电流通入两相对称绕组时,在电机内就产生一个旋 转磁场。当电流变化一个周期时,旋转磁场在空间转了一圈。
励磁绕组 控制绕组
励磁绕组 控制绕组
旋转磁场的转速决定于定子绕组极对数和电源的频率。图所表
示的是一台两极的电机,即极对数P=1。对两极电机而言,电
1 2
3
4
1
56
7
8
9
2、 转子
(1) 转子 铁芯槽内放铜条,端
部用短路环形成一体, 或铸铝形成转子绕组。
转 定子 子
壳体
笼型转子
铸铝的笼型转子
(2) 杯 转子纲
薄壁园筒形,放于内外定 子之间。一般壁厚为0.3mm
转 定子 子
壳体
杯型转子
2.2 转动原理
2.2 转动原理
2.2 转动原理
当磁铁旋转时,在空间形成一个旋转磁场。假设永久磁铁是 顺时纠方向以n0的转速旋转,那末它的磁力线也就以顺时针方向 切割转子导条,在转子导条中就产生感应电势。根据右手定则, N极下导条的感应电势方向垂直地从纸面出来。而S极下导条的 感应电势方向垂直地进入纸面。由于鼠笼转子的导条都是通过 短路环连接起来的,因此在感应电势的作用下,在转子导条中 就会有电流流过,电流有功分量的方向和感应电势方向相同。 再根据通电导体在磁场中受力原理,转子载流导条又要与磁场
(1)调速范围宽广。伺服电动机的转速随着控制电 压改变,能在宽广的范围内连续调节。 (2)转子的惯性小,即能实现迅速启动、停转。 (3)控制功率小,过载能力强,可靠性好。
驱动器
交流伺服 电机器
交流伺服电机系统
伺服电机主要构成
1、结构(永磁同步电机) 主要由:定子1、转子5和检测元件8等几部分组成。
流每变化一个周期,磁场旋转一圈,因而当
电源频率f=400 Hs,即每秒变化400个周期时,磁场每秒应当
转400圈,故对两极电机,即P=1而言,旋转磁场转速为
n0= 24000 r/min
旋转磁场转速为的一般表达式为
n0
f (r / s) 60 f
p
p
(r / min)
对于伺服电动机,还有一条很重要的机械特性,这就是零
培训资料
• 名称:伺服电机知识培训(工程师培训) • 所属班组:xx • 汇报人:xx
伺服电机知识培训
一.伺服电机基本知识
伺服来自英文单词Servo,指系统跟随外部指令进行人们 所期望的运动,运动要素包括位置、速度和力矩。
最常见的伺服是交流永磁同步伺服电机, 伺服电机内部 的转子是永磁铁,驱动器控制的U/V/W三相电在定子中形成 变化的电磁场,转子在此磁场的作用下转动,同时电机自带 的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进 行比较,调整转子转动的角度。伺服电机的精度决定于编码 器的精度(线数)。最常见的是2500线标准编码器配置的伺 服电机。
1、交流伺服电动机 2、直流伺服电动机
同步伺服 异步伺服
伺服电机知识点概述
• 电机制造是一个传统行业,已经存在100余年。 • 电机的控制技术,是除了气缸控制技术外,比较
难的技术;特别是大家之前经常提到的“矢量控 制技术”。
• 电机控制技术的难点,交流电机模型特点是高阶、 非线性、强耦合的多变量系统;
相互作用产生电磁力,这个电磁力F作用在转子上,并对转轴形
成电磁转矩。根据左手定则,转矩方向与磁铁转动的方向是一 致的,也是顺时针方向。因此,鼠笼转子便在电磁转矩作用下 顺着磁铁旋转的方向转动起来。
励磁绕组 控制绕组
电气原理图
ic I m sin t
if I m sin t 90
if ห้องสมุดไป่ตู้c
伺服电动机又称执行电动机,在自动控制系统中,用作 执行元件,把所收到的电信号转换成电动机轴上的角位移或 角速度输出。分为直流和交流伺服电动机两大类。
在交流伺服系统中,电动机的类型有永磁同步交流伺服 电机(PMSM)和感应异步交流伺服电机(IM),其中,永
磁同步电机具备十分优良的低速性能、可以实现弱磁高速控制,调速范 围宽广、动态特性和效率都很高,已经成为伺服系统的主流之选。而 异步伺服电机虽然结构坚固、制造简单、价格低廉,但是在特性上和 效率上存在差距,只在大功率场合得到重视。 交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、 动态响应和运行稳定性等方面来衡量。中低档的伺服系统调速范围在 1:1000以上,一般的在1:5000~1:10000,高性能的可以达到1:100000 以上;定位精度一般都要达到±1个脉冲,稳速精度,尤其是低速下的 稳速精度比如给定1rpm时,一般的在±0.1rpm以内,高性能的可以达 到±0.01rpm以内;动态响应方面,通常衡量的指标是系统最高响应频 率,即给定最高频率的正弦速度指令,系统输出速度波形的相位滞后 不超过90°或者幅值不小于50%。应用在特定要求高的一些场合,如 伺服电机MR-J3系列的响应频率可达900Hz,目前国内主流产品的频率 在200~500Hz。运行稳定性方面,主要是指系统在电压波动、负载波 动、电机参数变化、上位控制器输出特性变化、电磁干扰、以及其他 特殊运行条件下,维持稳定运行并保证一定的性能指标的能力。
均为负值,即为制动转矩。因而当控制电压UC取消变为单相运行
时,电机就立刻产生制动转矩,与负载阻转矩一起促使电机迅 速停转,这样就不会产生自转现象。
C
A
B
伺服电动机的机械特性
结论:改变控制电压的大 小,就实现了转速的控制
• 电机控制技术,已经逐步实现直驱控制。像安川 已经推出配套驱动器的直驱电机。
1.2伺服电机最大特点
在有控制信号输入时,伺服电动机就转动;没 有控制信号输入,它就停止转动。改变控制电压的 大小和相位(或极性)就可改变伺服电动机的转速和 转向。
信号时的机械特性,所谓零信号,就是控制电压UC=0,这时 磁场是脉振磁场,它可以分解为幅值相等、转向相反的两个圆
形旋转磁场,其作用可以想象为有两对相同大小的磁铁N—S 和N—S在空间以相反方向旋转。
当电阻已增大到使临界转差率>1的程度时,合成转矩曲线与横 轴相交仅有一点(S=1处),而且在电机运行范围内,合成转矩
控制绕组 励磁绕组
UF1
UC1
UC2
UF2
当两相对称电流通入两相对称绕组时,在电机内就产生一个旋 转磁场。当电流变化一个周期时,旋转磁场在空间转了一圈。
励磁绕组 控制绕组
励磁绕组 控制绕组
旋转磁场的转速决定于定子绕组极对数和电源的频率。图所表
示的是一台两极的电机,即极对数P=1。对两极电机而言,电
1 2
3
4
1
56
7
8
9
2、 转子
(1) 转子 铁芯槽内放铜条,端
部用短路环形成一体, 或铸铝形成转子绕组。
转 定子 子
壳体
笼型转子
铸铝的笼型转子
(2) 杯 转子纲
薄壁园筒形,放于内外定 子之间。一般壁厚为0.3mm
转 定子 子
壳体
杯型转子
2.2 转动原理
2.2 转动原理
2.2 转动原理
当磁铁旋转时,在空间形成一个旋转磁场。假设永久磁铁是 顺时纠方向以n0的转速旋转,那末它的磁力线也就以顺时针方向 切割转子导条,在转子导条中就产生感应电势。根据右手定则, N极下导条的感应电势方向垂直地从纸面出来。而S极下导条的 感应电势方向垂直地进入纸面。由于鼠笼转子的导条都是通过 短路环连接起来的,因此在感应电势的作用下,在转子导条中 就会有电流流过,电流有功分量的方向和感应电势方向相同。 再根据通电导体在磁场中受力原理,转子载流导条又要与磁场
(1)调速范围宽广。伺服电动机的转速随着控制电 压改变,能在宽广的范围内连续调节。 (2)转子的惯性小,即能实现迅速启动、停转。 (3)控制功率小,过载能力强,可靠性好。
驱动器
交流伺服 电机器
交流伺服电机系统
伺服电机主要构成
1、结构(永磁同步电机) 主要由:定子1、转子5和检测元件8等几部分组成。
流每变化一个周期,磁场旋转一圈,因而当
电源频率f=400 Hs,即每秒变化400个周期时,磁场每秒应当
转400圈,故对两极电机,即P=1而言,旋转磁场转速为
n0= 24000 r/min
旋转磁场转速为的一般表达式为
n0
f (r / s) 60 f
p
p
(r / min)
对于伺服电动机,还有一条很重要的机械特性,这就是零
培训资料
• 名称:伺服电机知识培训(工程师培训) • 所属班组:xx • 汇报人:xx
伺服电机知识培训
一.伺服电机基本知识
伺服来自英文单词Servo,指系统跟随外部指令进行人们 所期望的运动,运动要素包括位置、速度和力矩。
最常见的伺服是交流永磁同步伺服电机, 伺服电机内部 的转子是永磁铁,驱动器控制的U/V/W三相电在定子中形成 变化的电磁场,转子在此磁场的作用下转动,同时电机自带 的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进 行比较,调整转子转动的角度。伺服电机的精度决定于编码 器的精度(线数)。最常见的是2500线标准编码器配置的伺 服电机。
1、交流伺服电动机 2、直流伺服电动机
同步伺服 异步伺服
伺服电机知识点概述
• 电机制造是一个传统行业,已经存在100余年。 • 电机的控制技术,是除了气缸控制技术外,比较
难的技术;特别是大家之前经常提到的“矢量控 制技术”。
• 电机控制技术的难点,交流电机模型特点是高阶、 非线性、强耦合的多变量系统;
相互作用产生电磁力,这个电磁力F作用在转子上,并对转轴形
成电磁转矩。根据左手定则,转矩方向与磁铁转动的方向是一 致的,也是顺时针方向。因此,鼠笼转子便在电磁转矩作用下 顺着磁铁旋转的方向转动起来。
励磁绕组 控制绕组
电气原理图
ic I m sin t
if I m sin t 90
if ห้องสมุดไป่ตู้c
伺服电动机又称执行电动机,在自动控制系统中,用作 执行元件,把所收到的电信号转换成电动机轴上的角位移或 角速度输出。分为直流和交流伺服电动机两大类。
在交流伺服系统中,电动机的类型有永磁同步交流伺服 电机(PMSM)和感应异步交流伺服电机(IM),其中,永
磁同步电机具备十分优良的低速性能、可以实现弱磁高速控制,调速范 围宽广、动态特性和效率都很高,已经成为伺服系统的主流之选。而 异步伺服电机虽然结构坚固、制造简单、价格低廉,但是在特性上和 效率上存在差距,只在大功率场合得到重视。 交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、 动态响应和运行稳定性等方面来衡量。中低档的伺服系统调速范围在 1:1000以上,一般的在1:5000~1:10000,高性能的可以达到1:100000 以上;定位精度一般都要达到±1个脉冲,稳速精度,尤其是低速下的 稳速精度比如给定1rpm时,一般的在±0.1rpm以内,高性能的可以达 到±0.01rpm以内;动态响应方面,通常衡量的指标是系统最高响应频 率,即给定最高频率的正弦速度指令,系统输出速度波形的相位滞后 不超过90°或者幅值不小于50%。应用在特定要求高的一些场合,如 伺服电机MR-J3系列的响应频率可达900Hz,目前国内主流产品的频率 在200~500Hz。运行稳定性方面,主要是指系统在电压波动、负载波 动、电机参数变化、上位控制器输出特性变化、电磁干扰、以及其他 特殊运行条件下,维持稳定运行并保证一定的性能指标的能力。
均为负值,即为制动转矩。因而当控制电压UC取消变为单相运行
时,电机就立刻产生制动转矩,与负载阻转矩一起促使电机迅 速停转,这样就不会产生自转现象。
C
A
B
伺服电动机的机械特性
结论:改变控制电压的大 小,就实现了转速的控制