四轴飞行器制作应用实例大全
基于STM32的四轴飞行器设计

基于STM32的四轴飞行器设计引言:四轴飞行器(Quadcopter)是一种重量轻、机动性强的飞行器,在无人机技术中应用广泛。
本文将介绍基于STM32的四轴飞行器设计。
一、STM32介绍:STM32是意法半导体公司推出的一款高性能32位微控制器系列,它具有强大的计算处理能力和丰富的外设资源,非常适合用于四轴飞行器的设计和控制。
二、硬件设计:1.处理器选择:选用性能较高的STM32系列微控制器作为飞行器的主控制单元,可根据实际需求选择合适的型号。
考虑到计算处理能力和外设资源的要求,建议采用高性能的STM32F4系列或STM32H7系列微控制器。
2.传感器:四轴飞行器需要借助多种传感器来获取飞行状态的信息,包括陀螺仪、加速度计、磁力计等。
这些传感器可以通过I2C或SPI接口与主控制单元连接,以获取实时的飞行姿态和姿态控制信息。
3.无线通信模块:可选择适合的无线通信模块,如Wi-Fi模块或蓝牙模块,用于与地面站或其他设备进行数据传输和控制指令的交互。
通过无线通信模块,可以实现四轴飞行器的遥控操作和数据传输。
4.电机和电调:四轴飞行器需要四个无刷电机和相应的电调来实现动力推力的控制。
电机和电调的选择应根据载荷和预期飞行能力来确定,同时需要考虑与主控制单元的通信接口兼容性。
5.电源系统:四轴飞行器需要一种可靠的电源系统来驱动其各个部件。
主要包括锂电池、电流传感器和稳压模块。
电流传感器用于监测整个系统的功耗,稳压模块用于为主控制单元和其他模块提供稳定的电源。
6.启动与显示模块:飞行器需要一种方便的启动与显示模块来显示系统状态和预警信息。
可以选择配备一块小型的液晶显示屏或LED指示灯,以及相关的按键和蜂鸣器。
三、软件设计:1.实时操作系统(RTOS):可以选择合适的RTOS系统,如FreeRTOS或CMSIS-RTOS,用于实现四轴飞行器的任务管理和调度。
RTOS可以提供任务优先级调度、实时中断处理等相关功能,保证飞行器的实时性和稳定性。
自制四轴飞行器之路

自制四轴飞行器之路
四轴飞行器,又称四旋翼飞行器,简称四轴、四旋翼。
四轴飞行器的四个螺旋桨与电机直接相连,通过改变电机转速获得旋转机身的力,从而调整自身姿态。
四轴的叶片转速极高,有一定的危险性,一般不能在室内飞,特别是在调试过程中更加不稳定,轻则炸鸡撞坏物品,重则伤到人。
我做四轴的主要目的是为了学习飞控算法,这个过程肯定少不了调试,为了安全,我选择做一个小一点的,手掌那么大的四轴,叶片的威力比较小,价格也便宜,即使摔坏也不心疼。
这种小四轴一般采用PCB做机架,用720空心杯电机代替无刷电机,用MOS管代替电调,电池采用3.7v锂聚合物电池(尺寸跟手机电池差不多,但是放电电流要大很多),遥控用2.4G无线模块,或者用蓝牙连接手机,成本100左右,续航时间大概6-7分钟,遥控距离在10米以内。
选择零件
四轴上最重要的就是飞控,所以第一步:选择飞控。
市面上有许多现成飞控,也可以自己用电子元件做一个分控。
有很多有名的开源飞控,例如KK,QQ,匿名,MultiWii/MWC,APM/PIX等。
KK、QQ飞控功能较少,只有基本的四轴飞行功能,甚至不支持GPS。
匿名飞控是国内新出现的飞控,功能比以上两个要多,价格也要贵很多。
MultiWii/MWC飞控是基于arduino的,支持GPS,能路线规划,在线调试。
APM也是基于arduino的,功能更为齐全,硬件也更为复杂,飞控中有两块单片机,分别执行不同功能。
APM已将arduino的性能开发到极限,于是有了升级版PIX,从arduino 转到了STM32,处理速度提升了10倍,同样用了两块不同型号的STM32协同运作,是目前已知的最好的开源飞控。
基于STM32的四轴飞行器设计
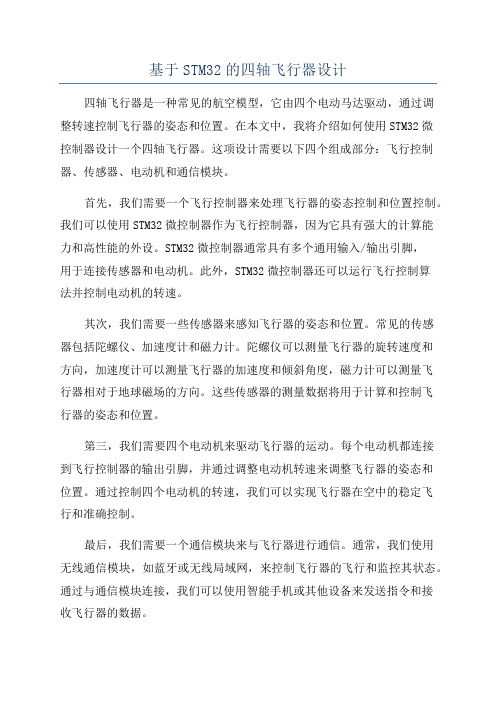
基于STM32的四轴飞行器设计四轴飞行器是一种常见的航空模型,它由四个电动马达驱动,通过调整转速控制飞行器的姿态和位置。
在本文中,我将介绍如何使用STM32微控制器设计一个四轴飞行器。
这项设计需要以下四个组成部分:飞行控制器、传感器、电动机和通信模块。
首先,我们需要一个飞行控制器来处理飞行器的姿态控制和位置控制。
我们可以使用STM32微控制器作为飞行控制器,因为它具有强大的计算能力和高性能的外设。
STM32微控制器通常具有多个通用输入/输出引脚,用于连接传感器和电动机。
此外,STM32微控制器还可以运行飞行控制算法并控制电动机的转速。
其次,我们需要一些传感器来感知飞行器的姿态和位置。
常见的传感器包括陀螺仪、加速度计和磁力计。
陀螺仪可以测量飞行器的旋转速度和方向,加速度计可以测量飞行器的加速度和倾斜角度,磁力计可以测量飞行器相对于地球磁场的方向。
这些传感器的测量数据将用于计算和控制飞行器的姿态和位置。
第三,我们需要四个电动机来驱动飞行器的运动。
每个电动机都连接到飞行控制器的输出引脚,并通过调整电动机转速来调整飞行器的姿态和位置。
通过控制四个电动机的转速,我们可以实现飞行器在空中的稳定飞行和准确控制。
最后,我们需要一个通信模块来与飞行器进行通信。
通常,我们使用无线通信模块,如蓝牙或无线局域网,来控制飞行器的飞行和监控其状态。
通过与通信模块连接,我们可以使用智能手机或其他设备来发送指令和接收飞行器的数据。
在设计四轴飞行器时,我们需要首先将传感器和电动机连接到STM32微控制器。
然后,我们需要编写飞行控制算法并将其加载到STM32微控制器上。
接下来,我们可以使用通信模块与飞行器连接并发送控制指令。
最后,我们可以启动电动机并观察飞行器的飞行和姿态控制效果。
总之,基于STM32微控制器的四轴飞行器设计是一个复杂而有趣的工程项目。
通过合理选择传感器、编写飞行控制算法和使用通信模块,我们可以实现一个高度稳定和可控的四轴飞行器。
基于STM32的四旋翼飞行器设计
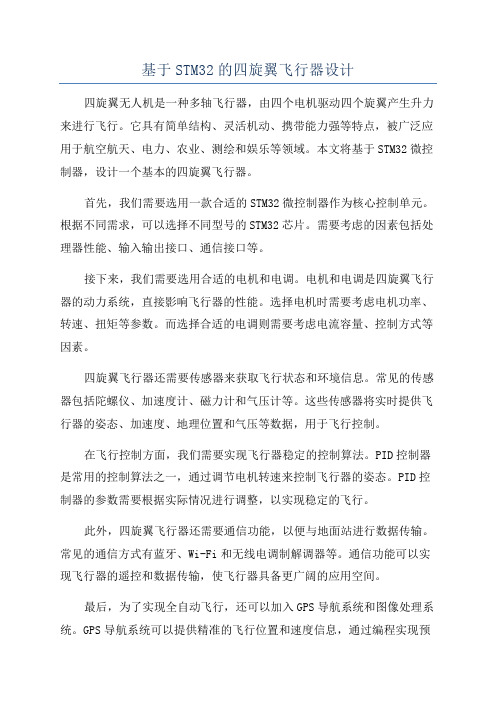
基于STM32的四旋翼飞行器设计四旋翼无人机是一种多轴飞行器,由四个电机驱动四个旋翼产生升力来进行飞行。
它具有简单结构、灵活机动、携带能力强等特点,被广泛应用于航空航天、电力、农业、测绘和娱乐等领域。
本文将基于STM32微控制器,设计一个基本的四旋翼飞行器。
首先,我们需要选用一款合适的STM32微控制器作为核心控制单元。
根据不同需求,可以选择不同型号的STM32芯片。
需要考虑的因素包括处理器性能、输入输出接口、通信接口等。
接下来,我们需要选用合适的电机和电调。
电机和电调是四旋翼飞行器的动力系统,直接影响飞行器的性能。
选择电机时需要考虑电机功率、转速、扭矩等参数。
而选择合适的电调则需要考虑电流容量、控制方式等因素。
四旋翼飞行器还需要传感器来获取飞行状态和环境信息。
常见的传感器包括陀螺仪、加速度计、磁力计和气压计等。
这些传感器将实时提供飞行器的姿态、加速度、地理位置和气压等数据,用于飞行控制。
在飞行控制方面,我们需要实现飞行器稳定的控制算法。
PID控制器是常用的控制算法之一,通过调节电机转速来控制飞行器的姿态。
PID控制器的参数需要根据实际情况进行调整,以实现稳定的飞行。
此外,四旋翼飞行器还需要通信功能,以便与地面站进行数据传输。
常见的通信方式有蓝牙、Wi-Fi和无线电调制解调器等。
通信功能可以实现飞行器的遥控和数据传输,使飞行器具备更广阔的应用空间。
最后,为了实现全自动飞行,还可以加入GPS导航系统和图像处理系统。
GPS导航系统可以提供精准的飞行位置和速度信息,通过编程实现预设航点飞行。
图像处理系统可以通过摄像头获取实时图像,并进行目标识别和跟踪,实现智能飞行等功能。
综上所述,基于STM32的四旋翼飞行器设计需要考虑微控制器选型、电机电调选择、传感器使用、飞行控制算法、通信功能等方面。
通过合理的设计和编程,可以实现一个功能齐全、性能稳定的四旋翼飞行器。
四轴飞行器DIY入门篇二

四轴飞行器DIY入门篇二:部件组装及试飞前一篇介绍了四轴飞行器的主要部件,大家对四轴也有了一个大概的认识,本篇就请大家一起来动手组装、调试四轴。
正式开工前先列一个配件清单,每个配件都有价位不等的商品可供选购,根据大家的预算可以自由组合,最低大约900块可以组装一架能飞起来的四轴~在“其他配件”栏,楼主没有列出具体价格,因为这些配件有些朋友可能已经有了,比如电烙铁,绑带,还有就是一些零件可以在买主要配件时找卖家附送,比如桨保护器,香蕉头等。
下面正式开工:第一步,连接电机和电调:电机和电调各有三根线,现在连接时无需考虑对应关系,后续调试时根据电机选择方向再做调整:注意:香蕉头和T插的焊接一定要牢固,不能有虚焊,否则后续飞行会有很大的炸机隐患!!!焊接教程可参看此视频,如果手艺不到家可请卖家代劳。
接好的四个电机电调,楼主没有用桨夹,用的是桨保护器,方便试飞,正式飞行时还是建议用桨夹比较安全:商品机架都有说明书,大家照说明书组装即可,楼主之前用的铝合金600机架好旧了,为了这篇经验,楼主做了个“日”字机架,成本大约30块钱,如果这个机架好飞,后续再考虑用碳纤管。
简单描述下制作过程:材料:两根1米长的16mm玻纤管,16mmPVC三通6个,轻木一根,绑带若干,502胶水;1.将玻纤管切为四根330mm长的短管,轻木也切为330mm长,用PVC三通连接玻纤管和轻木,连接处点上502;红色PVC三通为头位标示,蓝色PVC三通为尾部标示;2.在连接轻木的三通上钻一个孔,不要钻透,在小孔里面插一小段碳杆,滴上502固定,防止轻木移位;对了,做这一步之前最好找个水平仪矫正轻木到水平位置;3.在四个角的三通上钻孔,用来固定电机,位置如图:第三步,安装电机到机架今天没有找到合适长度的螺丝,所以暂时用扎带大法:扎带固定电调,电调T插连接电源分配线,不用分顺序;第四步,安装飞控楼主用一个5号电池盒做了一个平台,选取轻木中间的位置,用螺丝固定:电池盒盖的四角钻孔,安装4个尼龙柱:安装好飞控,调整到水平位置,然后再用尼龙柱固定,按照飞控说明书连接好接收机,电池检测线,电机、超声波等信号线:将接收机用魔术贴固定在四轴尾部的三通上:将超声波固定在四轴头部的三通上,用废旧塑料卡剪个形状托住超声波,注意:超声波发生器要和地面水平,否则影响精度;在飞控安装位的正下方垫上废旧泡面板,然后贴上魔术贴,上电池后注意重心要在飞控中心点,如果有偏差请调整电池位置:第六步,上电调试1.接收机和遥控器对码,具体方法请参考遥控器说明书,对飞控进行解锁:2.上桨调试动力系统,这里先不要固定桨,只要把桨搭在电机上即可,给油,观察桨的转动方向是否正确,如果不正确,任意调换两根电调和电机连接线的顺序即可;另外要注意安装桨的方向,桨页上有字的一面朝上:对了,由于楼主用的是便宜桨,所以在使用前最好对桨做个平衡矫正,最简易的方法就是在桨轴中穿一根碳管,碳管两头搭在架子上,观察桨是否能水平,根据实际情况在桨叶上粘透明胶,直到桨叶水平。
DIY四轴飞行器

DIY四轴飞行器
大四了,忙着找工作,很久都没动手DIY东西了,但是我一直坚持来论坛看看大家都在做什么,有没有什么好玩的
下面发一个最近闲暇时间做的一个小玩具
四轴飞行器
基本参数:
自制的MWC飞控,Arduino MEGA 2560 + GY-86模块
郎宇2212KV980电机
ATG1047桨
好盈天行者 20A电调
仿F450机架
4200mAh 3S锂电池
天地飞6A 2.4G 6通遥控器
先来张全图
飞控的制作:
为方便以后扩充更多外设,选择的Arduino MEGA2560的板子,传感器选择的GY-86模块,包括MPU6050陀螺仪与加速度计、HMC5883磁力计、MS5611高精度气压计。
自己用洞洞板焊了一块板子,把GY-86模块焊上,再焊上插针。
接线图见附件。
照片比较模糊手机比较烂拍照技术也比较烂
正面
背面
arduinoMEGA2560
背面飞线不是很乱哈
其他部分都是买的成品,在这里就不详细描述组装过程了。
郎宇2212KV980
导航灯和电压报警器
电调
电机
了解更多电子DIY信息,请搜微信号“dianzidiy”。
DIY四轴飞行器制作过程,超清晰多图!!!
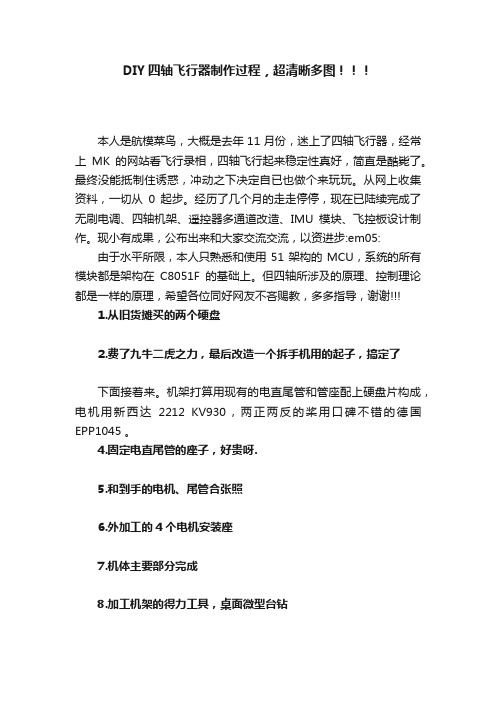
DIY四轴飞行器制作过程,超清晰多图本人是航模菜鸟,大概是去年11月份,迷上了四轴飞行器,经常上MK的网站看飞行录相,四轴飞行起来稳定性真好,简直是酷毙了。
最终没能抵制住诱惑,冲动之下决定自已也做个来玩玩。
从网上收集资料,一切从0起步。
经历了几个月的走走停停,现在已陆续完成了无刷电调、四轴机架、遥控器多通道改造、IMU模块、飞控板设计制作。
现小有成果,公布出来和大家交流交流,以资进步:em05: 由于水平所限,本人只熟悉和使用51架构的MCU,系统的所有模块都是架构在C8051F的基础上。
但四轴所涉及的原理、控制理论都是一样的原理,希望各位同好网友不吝赐教,多多指导,谢谢1.从旧货摊买的两个硬盘2.费了九牛二虎之力,最后改造一个拆手机用的起子,搞定了下面接着来。
机架打算用现有的电直尾管和管座配上硬盘片构成,电机用新西达2212 KV930,两正两反的桨用口碑不错的德国EPP1045 。
4.固定电直尾管的座子,好贵呀.5.和到手的电机、尾管合张照6.外加工的4个电机安装座7.机体主要部分完成8.加工机架的得力工具,桌面微型台钻9.EPP104510.一正一反关键词:四轴飞行器制作过程清晰多图寒月迷亭助工2013-09-23 13:33:28 评分2楼留名,学习,有空我也做一个。
评论itlab助工2013-09-23 13:35:22 评分3楼为提高发帖效率,制作过程从略,一切用图片说话11.和市场上3块钱一个的正桨对比12.用电机原配的桨保护器固定两叶桨13.焊上香蕉头,感觉重量不小,拆除前留个影14.电机安装固定方式15.机架整体结构16.平视角度,很有型吧17.整机完成效果图评论itlab助工2013-09-23 13:43:31 评分4楼好了,机架完成了。
接下来是遥控器的改造时间,买了个又便宜又大块的FT06-C,准备先把6通改到8通,增加两个比例通道,并且配上LCD液晶屏,用来显示控的相关参数。
四旋翼飞行器开发与应用实训案例集萃

一、概述四旋翼飞行器是无人机中最常见的类型之一,其开发与应用涉及多个领域,包括航空航天、电子、机械等。
针对四旋翼飞行器的开发与应用实训案例集萃,可以为学习者提供丰富的实践经验和应用技能,对相关行业的人才培养具有重要意义。
二、四旋翼飞行器的基本原理1. 四旋翼飞行器的结构四旋翼飞行器由四个电动马达驱动的螺旋桨组成,配备有飞控系统、电池组、遥控器等设备。
其结构简单,但需要各个部件协调配合。
2. 四旋翼飞行器的飞行原理四旋翼飞行器通过调节不同螺旋桨的转速实现上升、下降、前进、后退、左右移动等动作。
其稳定飞行需要依靠飞控系统的动态调节。
三、四旋翼飞行器的开发实训案例1. 四旋翼飞行器组装与调试学习者可以通过实际操作,进行四旋翼飞行器的组装与调试实训。
包括连接电路、安装螺旋桨、调节飞控系统参数等环节,从而掌握飞行器的基本组装与调试技能。
2. 飞行器控制算法设计针对四旋翼飞行器的控制系统,学习者可以进行控制算法的设计与实现。
例如PID控制算法、自适应控制算法等,通过实践加深对控制理论的理解。
3. 飞行器图像识别与导航结合计算机视觉和图像处理技术,学习者可以设计飞行器的图像识别与导航系统。
通过实验验证不同环境下的识别精度和导航准确性,提升飞行器在复杂环境下的应用能力。
4. 飞行器通信与遥控学习者可以学习飞行器的通信原理与遥控技术,设计并实现飞行器与地面控制站的通信系统。
以及利用遥控器对飞行器进行操控,从而了解飞行器的远程控制方式。
5. 飞行器飞行测试与性能评估在实训中,学习者可以对已开发的飞行器进行飞行测试和性能评估。
包括起飞、稳定飞行、自动悬停、倒飞等动作的测试,并对飞行器的飞行性能进行分析与评估。
四、四旋翼飞行器的应用实训案例1. 摄影与摄像四旋翼飞行器可以搭载相机或摄像头,实现对地面目标的高空拍摄和拍摄。
学习者可以通过实践掌握飞行器在摄影与摄像应用中的操作技能。
2. 环境监测与调查利用四旋翼飞行器的载荷舱,可以搭载各类传感器,实现对环境的监测和调查。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四轴飞行器制作应用实例大全
玩四轴这个东西,不是发明创造,人家懂只是知道得比你早一点,新手们入手四轴飞行器总是抱怨苦于无人可以指导,可是莫怪我等无言呀,往往一种问题有好几种原因,有时我是这么解决就好了,到你那边就不行了,所以玩四轴还是需要有扎实的基础,下面这些四轴设计实例是玩四轴总结出来的,有些是老前辈传授的,这些都是飞行模友的智慧。
玩四轴不要怕当新鸟,老鸟也是新鸟飞出来的。
1. 微型四旋翼航拍器
本四旋翼航拍器采用OV7725C彩色摄像头,飞控板主控芯片为STM32,遥控器主控芯片为STM32,本系统在正常飞行过程中,通过按下遥控器,右键即可拍下此刻的照片,并实时存储到SD卡中,四轴和遥控器均已集成锂电池智能充电功能,通过USB数据线直接插入电脑即可充电。
飞行器稳定,算法成熟,适合有一定基础的人开发。
2. mini小型四轴飞行器
网络上的小型四轴飞行器的PCB板都是要打烊的,打样的价格非常昂贵,我们学生党要怎么吧这么复杂的电路自己做出来呢,本人在集成飞小飞机上进行有效的更改,自己用普通做板的方式自己做出来了亲测成功哦。
3. STM32F103T8U6 +MPU6050微型四轴飞行器开源程序和PCB图有上位机
这个微型四轴飞行器使用的是STM32F103T8U6(STM 32F103T8U6数据手册)+MPU6050(MPU6050数据手册)等,开源程序和PCB图、有上位机,分享给大家学习。
附件提供了飞行器原理图和PCB、飞行源码、测试程序、上位机软件、相关芯片资料。
4. 基于WiFi通信的四旋翼无人飞行控制器
目标是使用STM32开发板并配合由Altium Designer电路板设计软件绘制的扩展板设计实现一套四旋翼无人飞行器控制器系统,同时完成一套PC端和手机端APP地面站控制软件的编写,并加入GPS进行惯性导航,使飞行器能够在地面站或遥控器的控制下完成平稳高速飞行,并能够实现空中自稳。
飞行器能够按地面站规划的路径实现自主巡航,并可携带摄像设备完成空中拍摄任务。
四旋翼无人飞行控制器已经经过验证,可以飞起来了,放心使用。
5. STM32 WIFI 四轴飞行器全部资料
采用WIFI技术控制飞行器,简单又方便,只要你有安卓手机就可以了,有做好的安卓AP,直接安装即可,附件有1.有原理图,pcb文件99和AD都可以打开;2.源代码,有STM32源码,有测试程序和主程序,焊接好后方便大家测试用的。
采用了RT_THREAD操作系统3.芯片资料;4.wifi开发手册和使用指南;5.有安卓上位机软件,有2.3版本和4.0版本。
6. 匿名迷你四轴飞行器,飞行器里的行家
资源包含主板PCB源码,遥控器源码,
CPU: STM32F103CB(STM32F103CB数据手册)
2.4G: NRF24L01(NRF24L01数据手册)
电子罗盘:HMC5883(HMC5883数据手册)
陀螺仪+加速度计:MPU-6050 (MPU-6050数据手册)
电机:7*16
自测,完全可用s
7. 10*10之内的小四轴飞行器
采用空心杯电机,安全;采用动力锂电池供电,持久;2.4G无线通信,可靠;上位机调试,方便。
(注:上位机是借用匿名的,不否认,我就是山寨匿名的);提供源程序,以及技术支持。
买过我PCB的人都知道,有问题(包括电路、器件、程序、机械)都可以随时问我,这是一般卖家做不到的哦!但毕竟是卖电路,程序只是鉴定电路是否有用,如果对程序都不懂的同学,慎买!
8. 将圆点博士四轴飞行器程序移植到STM32F407 平台STM32F4-Discovery
将圆点博士四轴飞行器程序移植到STM32F407(STM32F407数据手册),使用的平台STM32F4-Discovery开发工具keil,目前实现:
采集MPU6050传感器的信息,通过串口将数据传送到上位机电机PWM控制,通过开发板上的四个LED模拟可以跟上位机交互
9. 支持二次开发的四旋翼飞行器
采用STM32F103VCT6(STM32F103VCT6数据手册)作为处理器;采用MPU6050和HMC5883 BMP085作为传感器;包含三路串口输出、两个IIC接口、一个超声波接口。
、8路PWM输出和8路PWM输入。
可以二次开发,提供技术支持!
10.四轴飞行器多种控制方式
这个是大一点的四轴飞行器,上位机,遥控资料等都非常齐全,是我们今年福建省电子设计大赛的获奖作品,程序原理图都有哦,是原创作品,资料齐全。
11.微型四轴飞行器参考电路
微型四轴飞行器参考电路,附件包含原理图和PCB设计。
12. 基于STM32的四轴飞行器
非常小巧的四轴飞行器,带6轴传感器、加PA的无线通信、串口通信、充电管理,注意只有硬件原理图。