视觉检测系统简介
课件6-8视觉检测.

圆形水晶
方形水晶
三、欧姆龙智能视觉检测系统在上下料机器人工作站系统的应用
• 1、水晶形状的识别: • (1)、新建一个场景。 • (2)、在主界面单击“流程编辑”,进入流程编辑界面。 • (3)、输入图像。
圆形水晶图像输入
方形水晶图像输入
三、欧姆龙智能视觉检测系统在上下料机器人工作站系统的应用
• 1、水晶形状的识别:
模型登入
登入完城
二、欧姆龙智能视觉检测系统典型应用
• 2、工件编号的识别: • (3)、全部录入完成后回到模型登录界面,点击“测量参数”,进入测量
参数界面。把相适度改成90到100之间。最后点击“确定”回到主界面。 • (4)、 回到主界面,镜头对准工件,点击“执行测量”,此时会在右下角
对话框显示测量信息。
参数界面。把相适度改成95到100 之间。最后点击“确定”回到主界面。
测量参数界面
二、欧姆龙智能视觉检测系统典型应用
• 1、工件颜色的识别: • (7)、回到主界面,镜头对准工件,点击“执行测量”,此时会在右下角
对话框显示测量信息。
测量结果
二、欧姆龙智能视觉检测系统典型应用
• 2、工件编号的识别:
点击“图像输入”,进入“图像输入”界面,设置参数,如图所示,镜 头对准工件后,点击“确定”,则图像获取完毕。
输入图像
二、欧姆龙智能视觉检测系统典型应用
• 1、工件颜色的识别: • (4)、模型登入。
①、点击“分类”图标,进入设置界面在“分类”界面先设置“模型参 数”,在初始状态下设定,选择“旋转”,还要设定旋转范围、跳跃角度、 稳定度和精度等;具体设置如图所示。
模型登录界面
完成一个模型的录入
二、欧姆龙智能视觉检测系统典型应用
视觉检测原理
视觉检测原理
视觉检测原理是通过计算机视觉技术,对图像或视频进行分析和理解,从而实现目标物体的识别、分类和定位。
视觉检测系统通常包括图像获取、图像预处理、特征提取与描述、目标检测与识别、目标跟踪等组成部分。
在图像获取阶段,视觉检测系统通过相机等设备采集图像或视频。
而图像预处理阶段则对获取到的图像进行各种滤波、增强、降噪等操作,以提高后续处理的效果。
特征提取与描述阶段是将图像中的目标物体表示为计算机可识别的形式。
常用的特征包括形状、颜色、纹理和边缘等。
通过提取目标物体的特征并进行合适的描述,可以在后续的目标检测和识别过程中提供有效的信息。
目标检测与识别阶段是视觉检测系统的核心部分,主要通过使用机器学习、深度学习等算法来实现。
在目标检测中,系统将识别出图像中存在的目标物体,并给出它们的位置和边界框;在目标识别中,系统在目标物体检测的基础上,进一步进行物体的分类和标注。
目标跟踪阶段是对目标物体进行实时追踪,以保持目标在连续帧中的位置和状态的一致性。
通过使用各种跟踪算法,可实现目标的持续追踪,适用于视频监控、自动驾驶等场景。
综上所述,视觉检测原理是一种通过图像分析和理解来实现目
标物体检测、识别和跟踪的技术。
它在许多领域中得到广泛应用,为人们提供了更加智能化、高效化的解决方案。
机器视觉检测系统【深度解读】

机器视觉检测系统现代工业自动化生产中涉及到各种各样的检验、生产监视和零件识别应用,如汽车零配件批量加工的尺寸检查和自动装配的完整性检查、电子装配线的元件自动定位、IC上的字符识别等。
通常这种带有高度重复性和智能性的工作是由肉眼来完成的,但在某些特殊情况下,如对微小尺寸的精确快速测量、形状匹配以及颜色辨识等,依靠肉眼根本无法连续稳定地进行,其它物理量传感器也难以胜任。
人们开始考虑用CCD照相机抓取图像后送入计算机或专用的图像处理模块,通过数字化处理,根据像素分布和亮度、颜色等信息来进行尺寸、形状、颜色等的判别。
这种方法是把计算机处理的快速性、可重复性与肉眼视觉的高度智能化和抽象能力相结合,由此产生了机器视觉检测技术的概念。
视觉检测技术是建立在计算机视觉研究基础上的一门新兴测试技术。
与计算机视觉研究的视觉模式识别、视觉理解等内容不同,视觉检测技术重点研究的是物体的几何尺寸及物体的位置测量,如轿车白车身三维尺寸的测量、模具等三维面形的快速测量、大型工件同轴度测量以及共面性测量等,它可以广泛应用于在线测量、逆向工程等主动、实时测量过程。
视觉检测技术在国外发展很快,早在20世纪80年代,美国国家标准局就曾预计未来90%的检测任务将由视觉检测系统来完成。
因此仅在80年代,美国就有100多家公司跻身于视觉检测系统的经营市场,可见视觉检测系统确实很有发展前途。
在近几届北京国际机床展览会上已经见到国外企业展出的应用视觉检测技术研制的先进仪器,如流动式光学三坐标测量机、高速高精度数字化扫描系统、非接触式光学三坐标测量机等。
2.机器视觉检测系统构成、分类及工作原理2.1 系统构成与工作原理(1)系统构成典型的视觉系统一般包括光源、镜头、CCD照相机、图像处理单元(或图像采集卡)、图像处理软件、监视器、通讯/输入输出单元等。
(2)工作原理视觉系统的输出并非图像视频信号,而是经过运算处理之后的检测结果(如尺寸数据)。
通常,机器视觉检测就是用机器代替肉眼来做测量和判断。
智慧视觉检测系统设计方案

智慧视觉检测系统设计方案智慧视觉检测系统是一种基于计算机视觉技术的智能系统,能够对图像或视频进行实时检测和分析,以实现多种应用场景。
下面是一个简单的智慧视觉检测系统的设计方案,包括硬件设备、软件架构和算法模块等。
硬件设备:1. 摄像头:用于获取图像或视频数据。
2. 服务器:用于存储和处理图像或视频数据。
3. 显示屏和扬声器:用于显示检测结果和播放提示信息。
软件架构:1. 数据采集模块:负责从摄像头中获取图像或视频数据,并传输给后续处理模块。
2. 图像处理模块:对图像或视频进行预处理,包括去噪、调整亮度、增强对比度等。
3. 物体检测模块:使用目标检测算法对图像或视频中的物体进行检测和识别,并提取相关特征。
4. 特征分析模块:对提取的特征进行分析和处理,如计算物体的位置、角度、速度等。
5. 决策判断模块:根据分析结果,判断物体是否满足特定条件,如是否违规、是否异常等。
6. 提示反馈模块:根据决策结果,向用户提供合适的提示和反馈。
算法模块:1. 图像处理算法:包括图像去噪算法、对比度调整算法、边缘检测算法等,用于提升图像质量和清晰度。
2. 目标检测算法:如卷积神经网络(CNN)、支持向量机(SVM)等,用于识别图像或视频中的物体。
3. 特征提取算法:包括颜色特征提取、纹理特征提取、形状特征提取等,用于提取物体的特征。
4. 决策算法:基于机器学习的分类算法、规则引擎等,用于根据特征判断是否违规或异常。
5. 反馈算法:根据决策结果产生相应的提示信息或音频反馈。
系统工作流程:1. 数据采集:摄像头采集图像或视频数据。
2. 图像处理:对采集到的数据进行预处理,提升图像质量和清晰度。
3. 目标检测:利用目标检测算法对处理后的图像或视频进行检测和识别,找出物体的位置和边界框。
4. 特征分析:提取物体的颜色、纹理、形状等特征,并进行分析和处理。
5. 决策判断:基于特征分析的结果,使用决策算法对物体进行判断,判断是否满足特定条件。
CCD视觉检测工作原理解析
CCD视觉检测工作原理解析CCD(Charge Coupled Device)视觉检测技术是一种利用光电转换原理实现图像捕捉和处理的技术。
它是由美国贝尔实验室的Willard Boyle和George E. Smith于1969年发明的,并获得了2024年诺贝尔物理学奖。
CCD视觉检测技术在工业自动化、机器人、生物医学图像处理等领域得到了广泛的应用。
首先,CCD视觉检测系统通过镜头将被检测的物体投射在CCD面阵上。
CCD面阵是由大量的光敏元件组成,每个光敏元件都可以转换光信号为电信号。
当光照射到CCD面阵上时,每个光敏元件会产生一个电荷包。
这些电荷包的大小取决于光的强度,因此可以通过测量电荷包的大小来获取光的强度信息。
接下来,CCD视觉检测系统将光敏元件上的电荷转换为电压信号。
这一步称为信号转换。
首先,通过使用逐行、逐列或全图读取方式,将电荷包的信息从CCD面阵读出。
然后,使用模数转换器将电荷包转换为相应的电压值。
这些电压值表示了光敏元件上相应位置的光强度。
最后,将这些电压信号传输给后续的图像处理系统。
最后,CCD视觉检测系统通过图像处理算法对图像进行分析和处理。
这一步可以实现目标检测、特征提取、分类、测量等功能。
主要的图像处理方法包括卷积、滤波、边缘检测、灰度转换等。
通过对图像进行处理,系统可以实现对物体的检测、测量和控制。
1.高分辨率:CCD面阵中有成千上万个光敏元件,可以实现对图像进行细节的捕捉和分析,从而获得高分辨率的图像数据。
2.快速采集:CCD视觉检测系统可以以很高的速率对图像进行采集和处理,可以实现实时的图像检测和分析。
3.可编程性:CCD视觉检测系统可以通过编程实现不同的图像处理功能,可以根据实际需求进行定制化开发。
4.高灵敏度:CCD面阵中的光敏元件具有很高的灵敏度,可以捕捉到很小的光信号,适用于低光条件下的图像检测。
综上所述,CCD视觉检测技术通过光敏元件将物体的光信号转换为电信号,并通过图像处理算法对图像进行分析和处理,实现对目标物体的检测和测量。
视觉检测解决方案(3篇)

第1篇随着工业自动化和智能化水平的不断提高,视觉检测技术作为一种高效、准确的检测手段,在各个行业中得到了广泛应用。
本文将针对视觉检测技术,提出一种全面的解决方案,旨在为用户提供高质量、高效率的视觉检测服务。
一、视觉检测技术概述1. 定义视觉检测技术是利用计算机视觉、图像处理、模式识别等技术,对物体进行自动识别、测量、分类、定位等操作,实现对产品质量、形状、尺寸、颜色等属性的检测。
2. 应用领域视觉检测技术广泛应用于电子、汽车、食品、医药、包装、物流等行业,如产品外观检测、缺陷检测、尺寸测量、二维码识别等。
二、视觉检测解决方案1. 系统架构视觉检测系统主要由以下几部分组成:(1)光源:为被检测物体提供合适的照明,提高图像质量。
(2)相机:捕捉被检测物体的图像,将图像信息传递给计算机进行处理。
(3)图像处理软件:对图像进行预处理、特征提取、分类、测量等操作。
(4)控制系统:协调各部分设备的运行,实现自动化检测。
(5)执行机构:根据检测结果执行相应的操作,如剔除、分拣、标记等。
2. 解决方案实施步骤(1)需求分析首先,根据用户的具体需求,明确检测任务,如检测对象、检测指标、检测精度等。
(2)硬件选型根据需求分析结果,选择合适的硬件设备,包括光源、相机、执行机构等。
(3)软件设计根据硬件选型,设计图像处理软件,包括预处理、特征提取、分类、测量等模块。
(4)系统集成将硬件和软件进行集成,调试系统,确保各部分设备协同工作。
(5)测试与优化对系统进行测试,验证其性能,根据测试结果对系统进行优化。
3. 解决方案特点(1)高精度:通过优化算法和硬件选型,提高检测精度,满足不同行业的需求。
(2)高效率:自动化检测,减少人工干预,提高生产效率。
(3)高稳定性:系统设计合理,抗干扰能力强,保证长期稳定运行。
(4)可扩展性:可根据用户需求,方便地增加或修改检测功能。
三、案例分析1. 汽车行业在汽车行业,视觉检测技术主要用于汽车零部件的检测,如发动机、变速箱、底盘等。
智能视觉检测系统概述
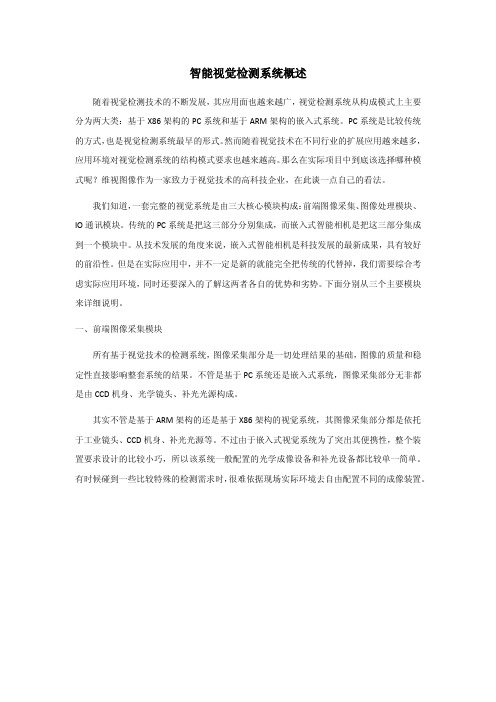
智能视觉检测系统概述随着视觉检测技术的不断发展,其应用面也越来越广,视觉检测系统从构成模式上主要分为两大类:基于X86架构的PC系统和基于ARM架构的嵌入式系统。
PC系统是比较传统的方式,也是视觉检测系统最早的形式。
然而随着视觉技术在不同行业的扩展应用越来越多,应用环境对视觉检测系统的结构模式要求也越来越高。
那么在实际项目中到底该选择哪种模式呢?维视图像作为一家致力于视觉技术的高科技企业,在此谈一点自己的看法。
我们知道,一套完整的视觉系统是由三大核心模块构成:前端图像采集、图像处理模块、IO通讯模块。
传统的PC系统是把这三部分分别集成,而嵌入式智能相机是把这三部分集成到一个模块中。
从技术发展的角度来说,嵌入式智能相机是科技发展的最新成果,具有较好的前沿性。
但是在实际应用中,并不一定是新的就能完全把传统的代替掉,我们需要综合考虑实际应用环境,同时还要深入的了解这两者各自的优势和劣势。
下面分别从三个主要模块来详细说明。
一、前端图像采集模块所有基于视觉技术的检测系统,图像采集部分是一切处理结果的基础,图像的质量和稳定性直接影响整套系统的结果。
不管是基于PC系统还是嵌入式系统,图像采集部分无非都是由CCD机身、光学镜头、补光光源构成。
其实不管是基于ARM架构的还是基于X86架构的视觉系统,其图像采集部分都是依托于工业镜头、CCD机身、补光光源等。
不过由于嵌入式视觉系统为了突出其便携性,整个装置要求设计的比较小巧,所以该系统一般配置的光学成像设备和补光设备都比较单一简单。
有时候碰到一些比较特殊的检测需求时,很难依据现场实际环境去自由配置不同的成像装置。
二、图像处理模块图像处理是整个系统的灵魂,图像处理模块是对采集到的图像的一种解读,把复杂的图像数据处理为机器可认知的数值信号。
我们所谓的嵌入式系统和PC系统就是由于这部分程序的载体不同而区分的。
我们知道基于ARM的嵌入式系统很难实现复杂的编程设计,那么在选择这两种模式时,首先要了解开发视觉检测程序的几种方式,然后根据实际情况选择合适的开发模式。
机器视觉检测系统
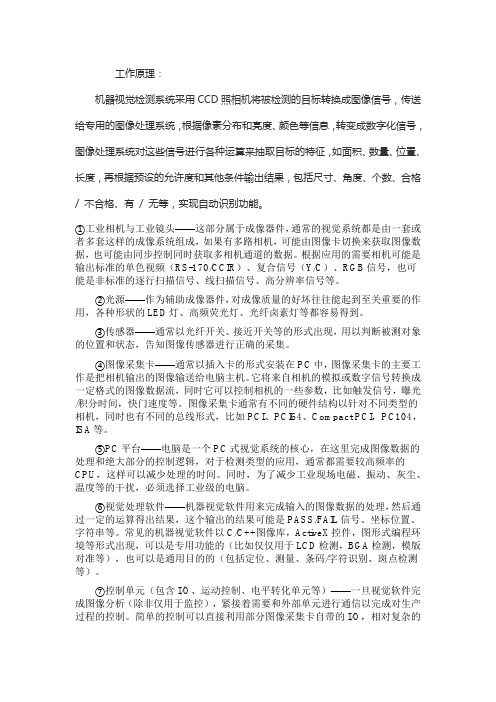
工作原理:机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格/ 不合格、有/ 无等,实现自动识别功能。
①工业相机与工业镜头——这部分属于成像器件,通常的视觉系统都是由一套或者多套这样的成像系统组成,如果有多路相机,可能由图像卡切换来获取图像数据,也可能由同步控制同时获取多相机通道的数据。
根据应用的需要相机可能是输出标准的单色视频(RS-170/CCIR)、复合信号(Y/C)、RGB信号,也可能是非标准的逐行扫描信号、线扫描信号、高分辨率信号等。
②光源——作为辅助成像器件,对成像质量的好坏往往能起到至关重要的作用,各种形状的LED灯、高频荧光灯、光纤卤素灯等都容易得到。
③传感器——通常以光纤开关、接近开关等的形式出现,用以判断被测对象的位置和状态,告知图像传感器进行正确的采集。
④图像采集卡——通常以插入卡的形式安装在PC中,图像采集卡的主要工作是把相机输出的图像输送给电脑主机。
它将来自相机的模拟或数字信号转换成一定格式的图像数据流,同时它可以控制相机的一些参数,比如触发信号,曝光/积分时间,快门速度等。
图像采集卡通常有不同的硬件结构以针对不同类型的相机,同时也有不同的总线形式,比如PCI、PCI64、Compact PCI,PC104,ISA等。
⑤PC平台——电脑是一个PC式视觉系统的核心,在这里完成图像数据的处理和绝大部分的控制逻辑,对于检测类型的应用,通常都需要较高频率的CPU,这样可以减少处理的时间。
同时,为了减少工业现场电磁、振动、灰尘、温度等的干扰,必须选择工业级的电脑。
⑥视觉处理软件——机器视觉软件用来完成输入的图像数据的处理,然后通过一定的运算得出结果,这个输出的结果可能是PASS/FAIL信号、坐标位置、字符串等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
选择图像采集卡要考虑以下几个方面:
(1) 视频输入的格式和数据传输率
大多数摄像机使用RS-422或者EIA644作为输出信号格式,这样图像采集卡就需要支持系 统使用的摄像机所采用的输出信号格式.从灵活性来说,如果两种格式都支持就更好.当摄像 机以较高的速度拍摄高分辨率图像后,会产生很高的输出速率,这时摄像机一般使用多路信 号同时输出,而图像采集卡必须能够支持多路输入及摄像机的输出速率.
Page:4
2.1 相机
目前工业用相机主要有CCD和CMOS两种.CMOS相机起步较晚,所摄取的画面质 量也不是很好,所以主要用在图像品质要求不是很高的产品上,比如手机附带的相机 大多数采用CMOS相机.CCD相机比CMOS相机更灵敏,在昏暗的光照下可以照出较好 的相片,因此工业上应用较为普遍的是CCD相机.CCD(Charge Coupled Device)是一 种半导体光学器件.该器件具有光电转换,信息存储和延时等功能,并且集成度高,能耗 小,故一出现就在固体图像传感,信息存储和处理等方面得到广泛应用.
一个典型的工业机器视觉系统包括:光源、镜头、 相机(包括CCD 相机和COMS相 机)、图像处理单元(或图像捕获卡)、图像处理软件、监视器、通讯 / 输入输出单元 等部分组成.各个部分之间相互配合,最终完成其檢測要求.
优点: 1.非接触式检测,对观察者和被观察者不会产生损伤. 2.具有较宽的光谱效应范围. 3.长时间稳定工作. 4.具有较高的量测精度. 5.拍照速度自动与被测物的速度相匹配,拍摄到理想的图像
相机拍摄要求与光源同步,这样能有效地拍摄高速运动物体的图像.
Page:8
2.4 图像采集卡 图像采集卡是视频信号从相机到电脑之间传输的桥梁.目前大多数相机还是模拟信号输 出,图像采集卡则将各种模拟视频信号经A/D转换成数字信号送入计算机,供计算机作处理,存 储,传输等之用.
Page:9
技術參數對比: Features Description Bus Applicable Cameras Camera Inputs Speed
(2) 数据的吞吐量
当图像采集卡的信号输入速率较高时,需要考虑图像采集卡与图像处理系统之间的带 宽问题.在使用PC 时, 图像采集卡使用PCI接口.PCI接口的理论峰值带宽为132Mbps.但在实际 使用中, 多数计算机上PCI 接口的平均数据传输率为50~90Mbps,有可能在瞬间高传输率时 不能满足传输的需要.为了避免与其他PCI 设备产生冲突时丢失数据,图像采集卡上应有数据 缓存.在一般情况下,有2MB的板载存储器可以满足大部分的任务要求. Page:10
Pa源是影响机器视觉系统输入的重要因素,因为它直接影响输入数据的质量和至少30 %的应用效果.由于被检测物体的颜色,材质,折射率等特性的千差万别,就必须根据每个特
定的应用实例,选择相应的照明装置,以达到最佳的效果.
光源的类型有卤素灯,荧光灯和LED光源等, 其主要性能的比较见下表.
目前使用較廣
Page:5
2.2 镜头
調節光圈大小,以改變進入 相機的光線多少,從而改變 圖像亮度
調節焦距,以確保圖像清晰 镜头的几个主要参数有:成像面,CCD感光片尺寸,焦距,视野,物距,景深和视角. 选择镜头时应考虑以下几个因素: (1)镜头的成像面与所用的CCD相机是否匹配.成像面与镜头本身的设计及生产有关.成像应 该是越大越好.可是有些厂家的镜头由于设计或生产上达不到技术要求,成像面会较小.
Page:7
光源按其照射方式可分为背向照明,前向照明,结构光和频闪光照明等.背向照明是被测 物放在光源和摄像机之间,其优点是能获得高对比度的图像;前向照明是光源和摄像机位于被 测物的同侧, 这种方式便于安装;结构光照明是将光栅或线光源等投射到被测物上, 根据它们
所产生的畸变,解调出被测物的三维信息;频闪光照明是将高频率的光脉冲照射到物体上,照
机器视觉是利用光电成像系统采集被控目标的图像,经计算机或专用的图像处
理模块进行数字处理,根据图像的像素分布,亮度和颜色等信息,进行尺寸,形状,颜色等 的识别.这样,就把计算机的快速性,可重复性,与人眼视觉的高度智能化和抽象能力相 结合,大大提高了生产的柔性和自动化程度.
二 机械视觉的组成---相机,镜头,光源,图像处理控制单元
Page:11
2.6 PC平台 本系统中PC平台用于接受图像采集卡输出的图像,然后由图像处理软件进行预处 理,分析和识别,判断檢測結果,最后将判断结果发送给PLC.由于图像采集卡和图像处 理软件的运行都消耗很大的系统资源,因此应当选用高性能的工控机作为PC平台, 保证系统快速稳定的运行.
目前正在使用工控電腦
2.5 数字I/O控制卡 在机器视觉系统中,输入/输出的控制很重要.系统中常要根据处理过程的需要来决定摄 像机的拍摄时间.如果采用了可重设的摄像机,需要产生重设信号.在一些系统中,由于需要设 定拍摄的帧率,应该有像素时钟发生器.外同步是指不同的视频设备之间用同一同步信号来 保证视频信号的同步,它可以保证不同设备输出的视频信号具有相同的帧行起止时间.为了 实现外同步,需要给摄像机输入一个复合同步信号或复合视频信号.如果图像采集卡已经具 有数字I/O功能, 能够产生摄像机和其他电子设备所需的选通,触发及其他电子信号,对系统是 很有用的,否则将需要独立的数字I/O卡.
(2)确定镜头的焦距,物距和视野(这个主要是依据实际的工作或安装环境来确定)这几个参
数关系是:焦距越小,视角越大,最小物距越短,视野越大.以最常用的三种镜头(50mm,25mm,16mm) 为例:50mm的镜头焦距是最大的,所以50mm镜头的视角就最小,而视野就最小,最小物距却是最远 的;25mm的镜头焦距次之;16mm的镜头焦距则是最小的,所以16mm镜头的视角就最大,而视野也 就最大,最小物距是最近的. Page:6
NI 8252 IEEE 1394a interface PCI and PXI Any DCAM-compliant IEEE 1394a camera 3 direct,16 with a hub 100Mbit/s
NI PCIe-8255R IEEE 1394a interface and IEEE 1394b PCI Express Any DCAM-compliant IEEE 1394a camera or IEEE 1394b camera 2 direct,16 with a hub 400Mbit/s
機器視覺系統簡介
Page:1
人类视觉
明亮而均匀的光源
获取众多的信息, 进行综合的判断
认识・判断 众多的信息
认识
过去的学识,经验,感情
Page:2
机器视觉
只提取必要的信息, 进行准确的判断
必要的信息 特定的光源 认识 识别,判断
图像处理器
Page:3
一 机械视觉的定义--机器代替人眼来做测量和判断