共轴双桨无人直升机
TD220共轴双旋翼无人直升机

天将具有 以下特点 :专利 设计,10余款任 务头快 速 更换 ,满 足 多 警 种 、多 行 业 需 求 ; 日用 38X 光功 能 , 适 应 超 距 离 隐 蔽 侦 查 需 求 ; 夜 视 拍 摄 功 能 ,满 足 警 用 夜 间侦 查 需 求;热 成像 系统 ,电 力 、环 境 部 门 巡 检 能 手; 网 捕 枪 功 能 ,特 警 、边 防部 门 实现 歹徒 高 空捕 捉 :毒 气 、 空 气 检 测 系 统 , 可 精 准 测 量 空 气 污 染 指 数 : 高 空 喊 话 及 按 照 灯 系 统 , 让 空 中指 挥 和 交 警 部 门 更 高 效 :IR激 光 扫 描 仪 配 合 专 利 影 像 系 统 ,1:500大 地 测 绘 如 此 简鹃 无 线 电 定 位 和 干 扰 系 统 ,轻 松 应 对 电 子 战 :救 援 任 务 仓 , 可实 现 救 灾 药 品 、食 品快 速 投 至 指 定地 点 。
“天 将 ” 无 人 机 在 任 何 环 境 下 均 可 进 行 快 速 部 署 ,对 目标 秘 密 侦 察 与 监 视 , 为 地 面 单 位 或 远 程 指 挥 中 心 提 供 实 时 现 场 情 报 和 目标 定 位 , 从 而 制 定 战 场 战 术 ,迅 速 制 敌 。 “天 将 ”无 人 机 视 野 广 阔 ,1s可 搜 寻 lkm , 10s便 可 迅 速 部 署 飞 行 ,60min任 务 续航 能 力 , 一 次 出 警 可 捕 捉 更 多 情 报 ,80km/h急 速 飞 行速 度 , 可 快 速 到 达 现 场 。
共轴双桨无人直升机

飞行器名称:SERVOHELI 260共轴双桨汽油动力直升机产品介绍:复合式共轴双桨无人直升机是我公司经多年科研攻关,自主研发的具有国际先进水平的小型无人直升机。
该机完全自主研发,更改了俄式共轴通过桨距离差改变航向的结构缺陷,采用共轴双主旋翼形式复合了尾桨设计,使安全和飞行稳定性、环境适应性均有所提高,在结构上实现俄式共轴体积无法小型化的弊端,使直升机完成不炸桨情况下的安全伞降回收。
目前在国内,该技术居领先或独有的地位。
这款无人直升机在2011年国际无人机大赛上取得佳绩,拥有完全知识产权。
截止2012年3月,这款复合式共轴双桨直升机已经申请到国家知识产权局发明专利2项,实用新型专利1项,外观设计专利2项。
几何参数:机体长度:1800mm机体宽度:300mm机体高度:600mm旋翼直径:1600mm起落架跨度:400mm桨叶片数:2×2发动机功率:26 cc重量:空机重量:16公斤任务载重:5公斤最大起飞重量:25公斤飞行性能:海平面最大平飞速度:80 公里/小时海平面巡航速度:50~60公里/小时风力(飞行时):40公里/小时(阵风50公里/小时)风力(起降时):26公里/小时(无阵风)实用升限:1800 米最大续航时间:1 小时燃料:97(93)号车用汽油+高级摩托车2冲程油启动方式:12v(45Ah以上)直流车用电瓶地面启动。
发动机自带启动方式。
实现目标:同级别直升机任务载重提高到130%;抗风飞行能力比传统直升机提高150%安全性比传统单旋翼直升机提高400%;安定性能在结构上不依靠平衡仪的情况下实现自主悬停。
主要特点:⏹更安全:在低空发动机熄火时,可不依靠飞行经验平稳着陆;⏹更方便:一键式起落,自动进入悬停状态,克服飞行惯性,缩短培训时间;⏹更精准:不依靠电子设备,在低温严寒环境飞行时,工作状态依然稳定;⏹更经济:无需复杂昂贵的飞控、平衡仪等电子设备即可进入悬停姿态;⏹更灵活:对飞行场地和气候条件要求不高,机动性强,运输方便;⏹更稳定:比单旋翼直升机提高20%任务载荷,留空时间更长、抗风能力更强。
科技成果——共轴双桨无人直升机技术
科技成果——共轴双桨无人直升机技术成果简介当今民用无人机领域的视频传输系统中大部分使用的是模拟视频流方式。
限制了传输范围和质量,并且模拟视频流方式具有占带宽,易受干扰,分辨率低,存储不方便等缺点,早期的视频传输都是基于PC机的,笨重且不方便,为其应用带来了制约,现代的视频传输要求小巧便携,而技术的进步和发展带来的无线数字通信可以弥补这些缺点,视频压缩标准H.264和DSP的结合使得无线数字通信成为可能。
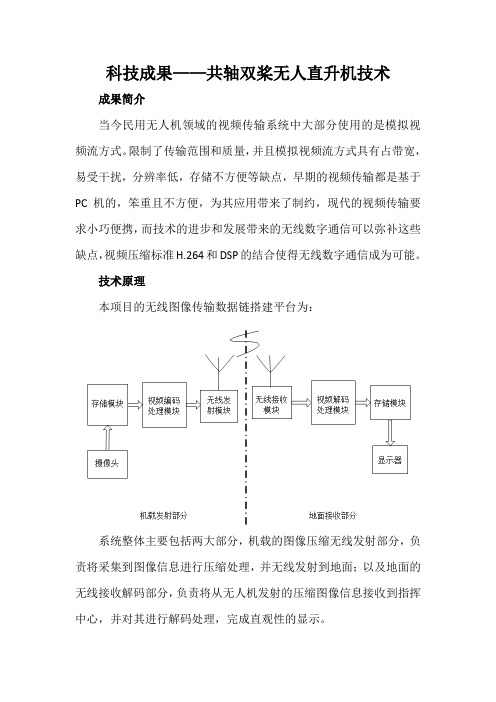
技术原理本项目的无线图像传输数据链搭建平台为:系统整体主要包括两大部分,机载的图像压缩无线发射部分,负责将采集到图像信息进行压缩处理,并无线发射到地面;以及地面的无线接收解码部分,负责将从无人机发射的压缩图像信息接收到指挥中心,并对其进行解码处理,完成直观性的显示。
结构中图像压缩无线发射部分安装在飞行器上,其中图像采集部分安装在方便进行图像摄取的地方。
无线接收图像解码处理部分放置地面作为指挥控制中心的一部分。
这样的整体设计即可满足利用微型无人机进行图像采集压缩实时处理,并无线发射回地面指挥平台进行解码显示,达到侦查目的。
工作步骤第一步,无线发射部分和无线接收部分进行识别,建立稳定的串口通信。
第二步,图像采集部分将采集到的数据经过模数转换成数字信号,给数字压缩处理部分,数字压缩处理部分将数字信号进行实时的高效压缩,控制部分将压缩后的图像数据传给无线发射部分进行发射。
第三步,地面的无线接收部分将接收的压缩图像数据给图像解码部分,进行解码处理,然后解码成功的图像就可以在显示设备上进行显示分析,从而完成整体的视频图像的传输。
视频采集部分采用TVP5150模块。
视频传输部分采用2.4GHz数字微波传输方式,选用nRF2401无线收发模块。
视频处理部分采用H.264标准,外加DSP的移植与封装。
视频压缩部分可以很好很方便地运用到无线数字通信中,发挥高效率图像压缩功能。
适用范围消防、公安、环境、新闻、农业、军事、灾害评估等。
复合式双桨共轴无人直升机布局的优势

复合式双桨共轴无人直升机布局的优点复合式双桨共轴直升机布局的优点很多:复合了尾桨的共轴直升机使飞行时多了一份安全的保障。
由于上下旋翼反向旋转,形成了直升机水平方向的力矩平衡,所以双桨共轴直升机可不需要尾桨来平衡直升机水平方向上的力矩。
前苏军在阿富汗的作战经验表明,作战中损失的苏军直升机有30%与尾桨有关,主要是:尾桨的弹伤或异物损伤;承载的尾梁损伤;长距离的尾桨传动轴系损伤等。
共轴式直升机的设计师直升机的升力产生与尾桨有关的损伤无缘,同时复合的尾桨角度为0度,飞行是可以大大节省尾桨所耗用的额外功率。
即使在尾桨故障发生时,它仍可用主旋翼来实现大转弯角度的安全返航,当一层主旋翼发生故障是,它仍可以像正常的单旋翼直升机一样工作,这带来了更强的生存能力,比如俄国的卡-50机身后半部分的结构主要是出于气动布局的需要,即便该部分被击毁,直升机依然可以进行正常的飞行。
气动特性对称,机动性好。
在使用相同发动机的情况下,两副共轴式旋翼的升力比单旋翼/尾桨布局的旋翼升力大12%。
共轴式旋翼气动力对称性显然优于单旋翼式,不存在各轴之间互相交连的影响,机动飞行时易于操纵。
改变航向时,共轴式直升机很容易保持直升机的飞行高度,这在超低空飞行和飞越障碍物时尤其可贵,对飞行安全有重要意义。
因升力大,在提供同样引擎的情况下,共轴直升机的外廓尺寸自然要比单翼直升机要小,因此雷达识别特征和目视识别特征就小,便于隐蔽;外廓尺寸小,受弹面就小,战斗损伤概率也小。
由于复合式共轴双桨尾桨距为0度,可减小周期距控制的负担。
同时共轴双桨直升机受侧风影响较小。
共轴双桨的振动也由于两副反转的旋翼而较好地对消了,平稳性和悬停性好。
共轴双桨在同等升力下,旋翼直径可以较小,直升机总尺寸较紧凑,"占地面积"较小,操作更安全。
目前由沈阳通飞航空科技有限公司研制的复合式共轴直升机设计多次在国际飞行器设计大赛上获奖,并有望近期内进入通航领域推广销售。
共轴双旋翼直升机原理
共轴双旋翼直升机原理
共轴双旋翼直升机是一种特殊的直升机结构,其独特的设计原理使其在飞行性能和操纵特性上具有独特的优势。
本文将介绍共轴双旋翼直升机的原理,包括其结构特点、工作原理和飞行特性。
共轴双旋翼直升机采用了两个相互对称的旋翼,它们位于同一轴线上并且以相反的方向旋转。
这种设计可以有效地减小旋翼间的相互干扰,提高直升机的飞行效率和稳定性。
同时,共轴双旋翼直升机还可以减小机身长度,提高机动性和操纵性能。
在共轴双旋翼直升机中,两个旋翼的叶片通常采用交叉布置,这样可以减小旋翼间的干扰,降低噪音和振动。
此外,共轴双旋翼直升机通常采用复合材料等轻质材料制造,可以减小整机重量,提高飞行性能。
在工作原理上,共轴双旋翼直升机的两个旋翼可以分别提供升力和反扭矩,它们之间通过传动系统相互连接并同步工作。
这种设计使得直升机可以实现更高的升力和更好的操纵性能,适用于复杂的飞行任务。
在飞行特性上,共轴双旋翼直升机具有良好的稳定性和操纵性能。
其双旋翼结构可以有效地抵消旋翼的扭矩,使得直升机在起飞、飞行和着陆过程中更加稳定。
同时,共轴双旋翼直升机的操纵性能也得到了提高,可以实现更快速、更灵活的机动飞行。
总的来说,共轴双旋翼直升机通过其独特的设计原理,在飞行性能和操纵特性上具有独特的优势。
它的结构特点、工作原理和飞行特性使得它成为一种理想的直升机结构,适用于各种复杂的飞行任务。
希望本文的介绍能够帮助读者更好地了解共轴双旋翼直升机的原理和特点。
无人机总体设计报告

图 1.4 任务剖面 运动模式示意图如下:
9
图 1.5 垂直起降及模式转换 在此模式下, 无人机机翼呈“十” 字状, 机械结构锁死使机翼固 定, 而后螺旋桨的旋转轴方向与上翼面垂直, 拉力方向垂直于上翼面, 逐渐增加拉力从而使飞行器垂直起飞, 垂直降落模式拉力逐渐减小从 而使飞行器降落。
图 1.6 平飞爬升
1
目录 前言 .................................................................................................... 4 第一章 总体设计与分析 .................................................................... 5 1.1 概念介绍................................................................................ 5 1.2 设计背景................................................................................ 5 1.3 设计定位................................................................................ 6 1.4 设计灵感................................................................................ 7 1.5 结构外形................................................................................ 8 1.6 运动模式................................................................................ 9 第二章 气动布局设计与分析 ........................................................... 12 2.1 背景介绍.............................................................................. 12 2.2 主要设计思想 ...................................................................... 12 2.3 设计过程(矩形机翼) ....................................................... 12 第三章 结构设计与分析 .................................................................. 16 3.1 设计要求.............................................................................. 16 3.2 参考方案.............................................................................. 16 3.3 分析与选择.......................................................................... 18 第四章 能源、推进设计与分析 ....................................................... 20 4.1 相关资料.............................................................................. 20 4.2 任务分析.............................................................................. 21 4.3 能源可行性论证 .................................................................. 21 第五章 动力学分析与飞行控制 ....................................................... 23
无人机航空知识

4、起落架―――供模型飞机起飞、着陆和停放的装置。前部一个起落架,后面两面各一个起落架叫前三点式,前部两面各一个起落架,后面一个起落架叫后三点式。
5、发动机―――它是模型飞机产生飞行动力的装置。模型飞机常用的动力装置有:橡筋束、活塞式发动机、涡轮喷气式发动机、电动机。较少使用的有:脉冲喷气发动机(重量大,油耗大)、转子发动机(只有OS的一款)空气发动机(上世纪70年代用于室内模型与活塞发动机类似。
机翼和水平尾翼除产生升力外也产生阻力,其他部件一般只产生阻力。
2、平飞
水平匀速直线飞行叫平飞。平飞是最基本的飞行姿态。维持平飞的条件是:升力等于重力,拉力等于阻力。由于升力、阻力都和飞行速度有关,一架原来平飞中的模型如果增大了马力,拉力就会大于阻力使飞行速度加快。飞行速度加快后,升力随之增大,升力大于重力模型将逐渐爬升。为了使模型在较大马力和飞行速度下仍保持平飞,就必须相应减小迎角。反之,为了使模型在较小马力和速度条件下维持平飞,就必须相应的加大迎角。所以操纵(调整)模型到平飞状态,实质上是发动机马力和飞行迎角的正确匹配。
2、机身全长――模型飞机最前端到最末端的直线距离。
3、重心――模型飞机各部分重力的合力作用点称为重心。
4、尾心臂――由重心到水平尾翼前缘四分之一弦长处的距离。
5、翼型――机翼或尾翼的横剖面形状。
6、前缘――翼型的最前端。7、后缘――翼型的最后端。
8、翼弦――前后缘之间的连线。
机翼上下流速变化的原因有两个:a、不对称的翼型;b、机翼和相对气流有迎角。翼型是机翼剖面的形状。机翼剖面多为不对称形,如下弧平直上弧向上弯曲(平凸型)和上下弧都向上弯曲(凹凸型)。对称翼型则必须有一定的迎角才产生升力。
关于无人机设计师刘宾的访谈录
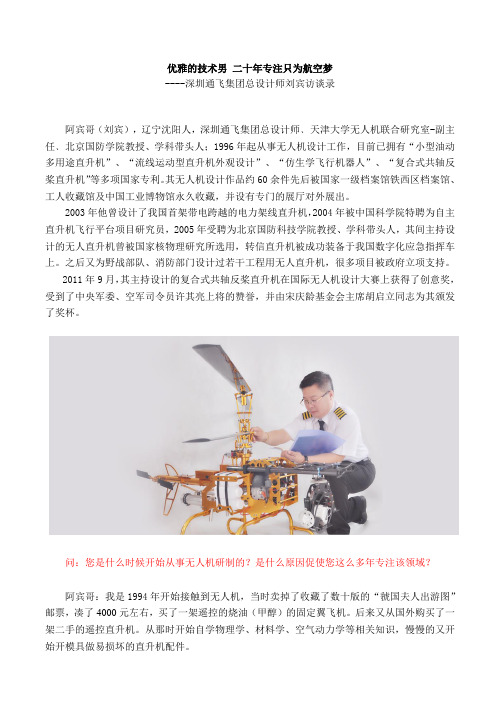
优雅的技术男二十年专注只为航空梦----深圳通飞集团总设计师刘宾访谈录阿宾哥(刘宾),辽宁沈阳人,深圳通飞集团总设计师﹑天津大学无人机联合研究室-副主任﹑北京国防学院教授、学科带头人;1996年起从事无人机设计工作,目前已拥有“小型油动多用途直升机”、“流线运动型直升机外观设计”、“仿生学飞行机器人”、“复合式共轴反桨直升机”等多项国家专利。
其无人机设计作品约60余件先后被国家一级档案馆铁西区档案馆、工人收藏馆及中国工业博物馆永久收藏,并设有专门的展厅对外展出。
2003年他曾设计了我国首架带电跨越的电力架线直升机,2004年被中国科学院特聘为自主直升机飞行平台项目研究员,2005年受聘为北京国防科技学院教授、学科带头人,其间主持设计的无人直升机曾被国家核物理研究所选用,转信直升机被成功装备于我国数字化应急指挥车上。
之后又为野战部队、消防部门设计过若干工程用无人直升机,很多项目被政府立项支持。
2011年9月,其主持设计的复合式共轴反桨直升机在国际无人机设计大赛上获得了创意奖,受到了中央军委、空军司令员许其亮上将的赞誉,并由宋庆龄基金会主席胡启立同志为其颁发了奖杯。
问:您是什么时候开始从事无人机研制的?是什么原因促使您这么多年专注该领域?阿宾哥:我是1994年开始接触到无人机,当时卖掉了收藏了数十版的“虢国夫人出游图”邮票,凑了4000元左右,买了一架遥控的烧油(甲醇)的固定翼飞机。
后来又从国外购买了一架二手的遥控直升机。
从那时开始自学物理学、材料学、空气动力学等相关知识,慢慢的又开始开模具做易损坏的直升机配件。
在制作配件过程中,发现国外生产的遥控直升机存在一些问题,比如,控制飞行动作的拉杆部分,一根推拉杆的安全性差,剧烈飞行时容易造成飞行的意外;于是就开始计划设计更安全的双推拉结构直升机,当时筹措了大约一百多万生产出了第一款30级甲醇动力竞技直升机,并申请到了第一个专利。
这可以说是我国第一款自主设计的油动直升机,比国内其它同类产品早了5年。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
飞行器名称:SERVOHELI 260共轴双桨汽油动力直升机
产品介绍:
复合式共轴双桨无人直升机是我公司经多年科研攻关,自主研发的具有国际先进水平的小型无人直升机。
该机完全自主研发,更改了俄式共轴通过桨距离差改变航向的结构缺陷,采用共轴双主旋翼形式复合了尾桨设计,使安全和飞行稳定性、环境适应性均有所提高,在结构上实现俄式共轴体积无法小型化的弊端,使直升机完成不炸桨情况下的安全伞降回收。
目前在国内,该技术居领先或独有的地位。
这款无人直升机在2011年国际无人机大赛上取得佳绩,拥有完全知识产权。
截止2012年3月,这款复合式共轴双桨直升机已经申请到国家知识产权局发明专利2项,实用新型专利1项,外观设计专利2项。
几何参数:
机体长度:1800mm
机体宽度:300mm
机体高度:600mm
旋翼直径:1600mm
起落架跨度:400mm
桨叶片数:2×2
发动机功率:26 cc
重量:
空机重量:16公斤
任务载重:5公斤
最大起飞重量:25公斤
飞行性能:
海平面最大平飞速度:80 公里/小时
海平面巡航速度:50~60公里/小时
风力(飞行时):40公里/小时(阵风50公里/小时)
风力(起降时):26公里/小时(无阵风)
实用升限:1800 米
最大续航时间:1 小时
燃料:97(93)号车用汽油+高级摩托车2冲程油
启动方式:
12v(45Ah以上)直流车用电瓶地面启动。
发动机自带启动方式。
实现目标:
同级别直升机任务载重提高到130%;
抗风飞行能力比传统直升机提高150%
安全性比传统单旋翼直升机提高400%;
安定性能在结构上不依靠平衡仪的情况下实现自主悬停。
主要特点:
⏹更安全:在低空发动机熄火时,可不依靠飞行经验平稳着陆;
⏹更方便:一键式起落,自动进入悬停状态,克服飞行惯性,缩短培训时间;
⏹更精准:不依靠电子设备,在低温严寒环境飞行时,工作状态依然稳定;
⏹更经济:无需复杂昂贵的飞控、平衡仪等电子设备即可进入悬停姿态;
⏹更灵活:对飞行场地和气候条件要求不高,机动性强,运输方便;
⏹更稳定:比单旋翼直升机提高20%任务载荷,留空时间更长、抗风能力更强。
功能用途:
这款260共轴双桨汽油动力直升机飞机在燃料上使用低成本的普通93号汽油,控制上无需复杂昂贵的飞控、平衡仪等电子设备即可进入悬停姿态,故适合更多的民用市场,同时因其姿态稳定,军工客户可将低成本且成熟的固定翼飞控技术进行移植,可完成目前工程固定翼监控无人机无法实现的低速,低空,且无法悬停的缺陷。
该机可在地势复杂的山区和舰船甲板上垂直起飞和降落,陆地、海上运载方便,可广泛应用于图像传输、对地观测、电子对抗、数据通讯、海上作战、中继转发、空中监测、电力巡线、高压架线、航空拍摄等领域。
2011年国际无人机大赛上获奖的“仿生学复合式共轴双桨直升机”
飞行器名称:SERVOHELI 520共轴双桨锂电动力直升机
产品介绍:
复合式共轴双桨无人直升机是我公司经多年科研攻关,自主研发的具有国际先进水平的小型无人直升机。
该机完全自主研发,更改了俄式共轴通过桨距离差改变航向的结构缺陷,采用共轴双主旋翼形式复合了尾桨设计,使安全和飞行稳定性、环境适应性均有所提高,在结构上实现俄式共轴体积无法小型化的弊端,使直升机完成不炸桨情况下的安全伞降回收。
目前在国内,该技术居领先或独有的地位。
这款无人直升机在2011年国际无人机大赛上取得佳绩,拥有完全知识产权。
截止2012年3月,这款复合式共轴双桨直升机已经申请到国家知识产权局发明专利2项,实用新型专利1项,外观设计专利2项。
几何参数:
机体长度:1890mm
机体宽度:450mm
机体高度:650mm
旋翼直径:1660mm
尾旋翼直径:240mm
起落架跨度:400mm
桨叶片数:2×2
引擎功率:52 cc
重量:
空机重量:16Kg
任务载重:10 Kg
最大起飞重量:25 Kg
飞行性能:
海平面最大平飞速度:80 公里/小时
海平面巡航速度:50~60公里/小时
风力(飞行时):40公里/小时(阵风50公里/小时)
风力(起降时):26公里/小时(无阵风)
实用海拔高度:3500米
最大续航时间:1 小时
最大航程:60 公里
动力电源:48V X 2
实现目标:
同级别直升机任务载重提高到130%;
抗风飞行能力比传统直升机提高150%
安全性比传统单旋翼直升机提高400%;
安定性能在结构上不依靠平衡仪的情况下实现自主悬停。
主要特点:
⏹更安全:在低空发动机熄火时,可不依靠飞行经验平稳着陆;
⏹更方便:一键式起落,自动进入悬停状态,克服飞行惯性,缩短培训时间;
⏹更精准:不依靠电子设备,在低温严寒环境飞行时,工作状态依然稳定;
⏹更经济:无需复杂昂贵的飞控、平衡仪等电子设备即可进入悬停姿态;
⏹更灵活:对飞行场地和气候条件要求不高,机动性强,运输方便;
⏹更稳定:比单旋翼直升机提高20%任务载荷,留空时间更长、抗风能力更强。
功能用途:
这款520共轴双桨锂电动力直升机飞机使用锂电电池,材料上更环保更安全。
控制上无需复杂昂贵的飞控、平衡仪等电子设备即可进入悬停姿态,故适合更多的民用市场,同时因其姿态稳定,军工客户可将低成本且成熟的固定翼飞控技术进行移植,可完成目前工程固定翼监控无人机无法实现的低速,低空,且无法悬停的缺陷。
该机可在地势复杂的山区和舰船甲板上垂直起飞和降落,陆地、海上运载方便,可广泛应用于图像传输、对地观测、电子对抗、数据通讯、海上作战、中继转发、空中监测、电力巡线、高压架线、航空拍摄等领域。
航拍实景照片。