一种履带式机器人设计及其越障分析_朴春日
一种轮履复合式全地形移动机器人设计

一种轮履复合式全地形移动机器人设计摘要:随着全球科技的发展和人类对于探索未知领域的需求增加,全地形移动机器人在多种应用场景中显示出巨大的潜力。
本文提出了一种轮履复合式全地形移动机器人设计,通过将轮式和履带式两种机器人设计理念相结合,来实现对复杂地形的适应能力。
该机器人具有灵活的操控性和稳定性,可以在不同的地形条件下高效地移动和执行任务。
1.引言全地形移动机器人在军事、探险、救援等领域具有广泛的应用前景。
然而,由于现有的机器人设计往往只能适应特定类型的地形,限制了其实际应用能力。
因此,研发一种能够适应多种复杂地形的移动机器人是一个有价值的研究课题。
2.设计理念本文提出的轮履复合式全地形移动机器人设计主要通过将轮式和履带式两种机器人设计理念相结合来实现对复杂地形的适应能力。
具体来说,机器人主要使用四个轮子和两条履带来实现移动。
轮子的设计使机器人具有良好的平稳性和灵活性,可以在平坦地面上高效地行进。
而履带的设计则可以提供更好的越障能力和降低对地面造成的损害,可以在不平坦的地面上保持稳定。
3.机械结构设计机器人的机械结构主要包括底盘、轮子和履带系统。
底盘采用轻量化设计,由强度高的合金材料制造,以减轻机器人的重量。
轮子采用气动轮胎设计,可以调节胎压以适应不同地面的要求。
履带系统由两条橡胶履带构成,可以通过液压系统调整履带的松紧程度,以提供更好的抓地力和越障能力。
4.控制系统设计机器人的控制系统采用多传感器融合技术,包括惯性测量单元、激光雷达和摄像头。
通过融合这些传感器的数据,机器人可以实时感知周围环境,并做出相应的控制策略。
同时,还可以通过遥控器进行远程操控,以适应不同的应用场景。
5.动力系统设计机器人的动力系统由多台电动机和液压系统组成。
电动机驱动轮子的转动,控制机器人的前进、转向和制动等动作。
液压系统则用于调节履带的松紧程度和提供额外的动力输出,以适应不同地形的要求。
6.实验与结果为了验证该机器人的设计效果,进行了一系列实验。
履带式机器人避障自动控制系统设计

收稿日期:2019-08-30ꎮ基金项目:国家自然科学基金资助项目(51265034)ꎮ作者简介:姚健康(1995 )ꎬ男ꎬ硕士生ꎻ通信作者:熊根良(1978 )ꎬ男ꎬ副教授ꎬ博士ꎬ712091209@qq.comꎮ引文格式:姚健康ꎬ熊根良ꎬ张驰洲.履带式机器人避障自动控制系统设计[J].南昌大学学报(工科版)ꎬ2019ꎬ41(4):385-390.㊀㊀文章编号:1006-0456(2019)04-0385-06履带式机器人避障自动控制系统设计姚健康ꎬ熊根良ꎬ张驰洲(南昌大学机电工程学院ꎬ江西南昌330031)㊀㊀摘要:针对履带式机器人的电机控制及避障等功能ꎬ设计了一种以STM32微控制器为内核的自主履带式机器人ꎮ搭建其硬件平台后以超声波传感器模块来获得障碍标志物与机器人的间隔信息ꎻ因传统PID控制下的电机转速响应慢㊁容易出现积分饱和现象ꎬ提出多级积分分离PID算法实现转速控制ꎬ同时引入模糊控制算法来实现行进中的避障控制ꎮ基于Matlab/Simulink平台对机器人控制器进行算法仿真ꎬ仿真结果表明机器人能可靠地躲避障碍物ꎬ并改善了电机的控制性能ꎻ在地面实验中ꎬ验证了履带式机器人的直行和避障功能良好ꎮ关键词:STM32单片机ꎻ超声波传感器ꎻ模糊控制ꎻ多级积分分离PID中图分类号:TP242.6㊀㊀㊀㊀文献标志码:ADesignofautomaticcontrolsystemforobstacleavoidanceofcrawlerrobotYAOJiankangꎬXIONGGenliangꎬZHANGChizhou(SchoolofMechatronicsEngineeringꎬNanchangUniversityꎬNanchang330031ꎬChina)Abstract:AimingatthemotorcontrolandobstacleavoidanceofcrawlerrobotsꎬasmallcrawlerrobotwithSTM32microcontrollerasthecorecontrollerwasdesigned.Firstlyꎬthehardwareplatformofthecrawlerrobotwasbuiltꎬandtheultrasonicsensormodulewasusedtoobtainthedistanceinformationoftheobstacleandtherobot.Sec ̄ondlyꎬduetotheslowresponseofthemotorunderthetraditionalPIDcontrolandtheeasyoccurrenceofintegralsaturationꎬamulti ̄stageintegralseparationPIDalgorithmwasproposedtorealizethespeedcontrolꎬandafuzzycon ̄trolalgorithmwasintroducedtorealizetheobstacleavoidancecontrolduringtravel.Therobotcontrollerwassimula ̄tedbasedonMatlab/Simulinkplatform.Thesimulationresultsshowedthattherobotcanreliablyavoidobstaclesandimprovethecontrolperformanceofthemotor.Inthegroundexperimentꎬitwasverifiedthatthecrawlerrobothasgoodstraight ̄throughandobstacleavoidancefunctions.KeyWords:STM32singlechipꎻultrasonicsensorꎻfuzzycontrolꎻmulti ̄levelintegralseparationPID㊀㊀近年来随着机器人技术的发展ꎬ机器人不仅广泛应用于工业领域ꎬ在民用电器㊁地质勘测㊁医疗救助和军事应用等领域也有着重要的用途ꎮ履带式机器人是一个涉及机械㊁电子信息㊁机器人控制技术和传感器技术等众多学科的复合系统ꎮ在我国ꎬ很多学者对履带式机器人的控制系统和功能进行了研究ꎮ柴钰等[1]针对履带式机器人的电机转速问题提出了一种改良的粒子群优化模糊算法ꎬ改善了直流电机的动态性能ꎬ同时在两驱动电机中间设计了速度同步补偿器ꎻ赵凯等[2]为了拓展地面识别方式采用声波传感器的履带式机器人对不同噪声环境下的地面进行了分类实验ꎬ地面类型识别率大幅提高ꎻ占卓帆等[3]针对履带式机器人结构功能设计了一种配有自动配气机构的履带吸盘式爬壁清扫机器人ꎮ现有的履带式机器人的避障控制系统中ꎬ电机转速控制精度低ꎬ同时避障过程中机器人灵敏度低ꎮ本文设计了一种基于模糊控制算法和多级积分第41卷第4期2019年12月㊀㊀㊀㊀㊀㊀南昌大学学报(工科版)JournalofNanchangUniversity(Engineering&Technology)Vol.41No.4Dec.2019㊀分离PID算法的履带式机器人ꎬ实现了机器人的避障功能ꎬ并且改善了直流电机的性能ꎮ采用STM32微控制器㊁超声波传感器模块等建立起机器人的功能平台ꎮ通过多级分离积分PID对电机转速进行了控制ꎬ之后采用模糊控制算法对输入量(即机器人和障碍物之间的距离和角度)模糊化后ꎬ建立模糊规则得到输出量(即机器人的转角)来实现避障ꎮ最后实验验证了算法的有效性ꎮ1㊀机器人硬件系统的设计㊀㊀履带式机器人的硬件系统是保证其实现自动行进㊁避障的重要基础[4]ꎬ对此ꎬ本文采用双履带式小车ꎬ其中履带式机器人的质量为16kgꎬ尺寸为350mmˑ220mmˑ180mmꎬ底盘高度为70mmꎬ材料结构为铝合金ꎬ驱动方式为双履带式ꎬ机器人的最大速度为400mm s-1ꎬ最大负重为5kgꎬ最大爬坡角度为20ʎꎮ控制系统包括主控器㊁超声波传感器㊁L298N电机驱动传感器[5]等ꎬ主控器选用ST公司的STM32F107ꎮ系统功能框图如图1所示ꎬ机器人实物图如图2所示ꎮ无刷直流电机L298N 电机驱动模城PWM串口输出通道定时器Corte-M4内核串口超声波传感器模块图1㊀履带式机器人系统框图Fig.1㊀Trackedrobotsystemblockdiagram图2㊀履带式机器人实物图Fig.2㊀Trackedrobotphysicalmap1.1㊀主控芯片主控芯片是履带式机器人的 大脑 ꎬ需要完成电机速度的控制[6]㊁传感器数据的读取以及控制算法[7]的实现等多项任务ꎬ因此对芯片性能及处理数据的运算能力的要求较为严格ꎮ本文采用ST公司生产的STM32F103微处理器作为MCU[8]ꎮ1.2㊀传感器芯片传感器芯片包括了超声波传感器模块和电机驱动模块ꎮ其中选用型号为HC-SR04的超声波传器ꎬ对障碍物的检测间隔为2~450cmꎻ直流电机驱动模块则使用L298N作为电机驱动芯片ꎬ其工作电压和输出电流稳定ꎮ1.3㊀车体结构机器人选用模块化并组装后的实验室机器人小车ꎬ材料采用铝合金材质ꎬ车子总体结构可分为底盘机构㊁履带轮机构㊁顶层支撑结构ꎮ底盘机构以方形铁板为主ꎬ通过连接杆件以便安装主动履带轮的电机[9]ꎬ其中底盘上层用来放置12V电池㊁开发板以及电机驱动模块ꎬ底盘前端留有部分空间用来安装超声波传感器ꎻ车体两边各安装套有履带的带轮组ꎬ每组6个行动轮ꎬ后方的主动轮由底盘上层的电机驱动ꎻ顶层支撑机构用来放置一个5V充电宝用来给控制板供电ꎮ2㊀机器人软件系统控制算法的设计㊀㊀履带式机器人的控制算法是基于STM32F103建立起来的ꎬ其中控制算法包括以下2个部分:1)基于多级分离积分PID的电机控制算法ꎬ其负责控制电机的转速ꎮ2)基于模糊控制的避障算法ꎬ其负责控制机器人躲避障碍物ꎮ2.1㊀电机控制策略履带式机器人的履带轮由2个无刷直流电机控制ꎬ对电机转速的控制将直接影响到机器人行进和避障[10]的可靠性ꎮ传统PID控制算法会使系统出现迟滞性㊁超调严重等现象ꎬ而对电机进行数学建模后[11]再采用多级分离积分PID控制算法[12]可大大减少系统的超调量和稳定时间ꎮ2.1.1㊀电机模型的建立利用电动机电枢回路方程和转矩平衡方程ꎬ建立传递函数关系ꎮ电枢回路方程为:ua=Ldiadt+iaR+ed(1)ed=Kdαn(2)式中:ua为电动机电枢的输入电压ꎻia为电枢绕组的电流ꎻed为电动机感应电动势ꎻL㊁R分别为电枢绕组的电感和电阻ꎻKd为电动机反电动势常数ꎻα为每极683 南昌大学学报(工科版)2019年㊀磁通ꎻn为电机转子的转速ꎮ转矩平衡方程为:Jdndt=M-Ml(3)M=Kmαia(4)式中:J为转动惯量ꎻM为电动机的电磁转矩ꎻMl为电动机的负载转矩ꎻKm为电动机电磁转矩常数ꎮ对式(1)作拉氏变换可得电机电枢电流和电压之间的传递函数:iaua-ed=1/Ra1+sLa/Ra(5)对式(3)作拉氏变换可得电机转子转速和动态转矩的传递函数:nM-Ml=1sJ(6)由式(2)㊁式(4)㊁式(6)便可形成一个带负反馈的闭环二阶控制系统ꎬ其电机转速与电枢电压的传递函数为:n(s)ua(s)=1KdαJRKdKmα2 Ls2R+JRsKdKmα2+1=1KdαTmTs2+Tms+1(7)对于本文所用的XD-37GB3525无刷直流电机ꎬ其Tm=10ꎬ1/Kdα=1900ꎬ而T约为Tm的1/10ꎬ所以由式(7)电机转速与电枢电压的传递函数为n(s)ua(s)=190s2+s+0.1(8)2.1.2㊀多级积分分离PID控制算法设计多级积分分离PID控制算法[13]的理论思想是当被控量电机转速与设定值|E(k)|得偏差较大时ꎬ取消积分作用ꎻ当被控量电机转速与设定值|E(k)|的偏差在一定范围内ꎬ根据偏差值|E(k)|的大小ꎬ把积分项乘以相应的权重添加到PID控制中ꎮ本文中ꎬ积分系数即积分项所对应的权重β的确定可分为以下3步:①先调节传统PID控制的3个参数ꎬ整定获得Kp㊁Ki㊁Kdꎮ②根据传统PID调参得到的参数和预期的控制要求ꎬ选择一个合适的阈值εꎮ③依据积分分离的思想ꎬ当转速偏差较大时则取消积分项ꎬ加快系统响应过程ꎻ当转速偏差在阈值范围内时ꎬ则引入积分项来消除静态误差ꎮ当转速偏差在预定的阈值范围内时ꎬ在0到ε的转速偏差范围内ꎬ设置不同的积分梯度和相对应的积分系数ꎬ遵循积分系数β与ε成反比的原则ꎬ积分系数β的确定见表1所示ꎮ表1㊀积分系数β的数值表Tab.1㊀Numericaltableofintegralcoefficientβ|E(k)|β|E(k)|β[0ꎬ5]1(10ꎬ15]0.3(5ꎬ10]0.6其他0基于Matlab/Simulink对无刷直流电机闭环控制进行仿真ꎮ传统PID控制器所整定得出的3个参数为Kp=3ꎬKi=0.04ꎬKd=0.1ꎬ而采用多级积分分离PID控制器所整定得到的3个参数为Kp=5ꎬKi=0.2ꎬKd=0.12ꎬ仿真图如图3所示ꎬ仿真结果如图4所示ꎮMux 实际转速期望转速图3㊀多级积分分离PID转速控制仿真图Fig.3㊀Multi ̄levelintegralseparationPIDspeedcontrolsimulationdiagram1501209060300286410传统PID 控制多级积分分离PID 控制加入干扰信号n /(r ·m i n -1)t/s图4㊀2种PID控制仿真结果Fig.4㊀TwoPIDcontrolsimulationresults在图3中ꎬfcn模块的作用是根据转速偏差|E(k)|的大小来选择是否累加积分项ꎮ在累加积分项时ꎬ根据转速偏差|E(k)|所处的范围ꎬ选择所对应的积分系数β的数值来进行PID控制ꎮ由仿真结果图4可知ꎬ传统PID控制在实际转速为120r min-1下ꎬ存在较为严重的超调ꎬ超调量约为12.5%ꎬ稳态时间约为1sꎬ响应速度较慢ꎮ而783 第4期㊀㊀㊀㊀㊀姚健康ꎬ等:履带式机器人避障自动控制系统设计采用多级积分分离PID控制超调量约为8%ꎬ稳态时间约为0.5sꎬ这样使得系统响应速度变快ꎬ并且减少系统出现严重超调的现象ꎮ之后在4s的时间给电机系统加入持续时间为10msꎬ振幅为40的阶跃信号时ꎬ可以看出多级积分分离算法的抗干扰性能和稳定性要优于传统PIDꎮ这样在实际控制过程中ꎬ电机到达期望速度的时间缩短ꎬ提高了避障的可靠性ꎬ同时避免在行驶过程中遇到干扰时如行进中陷入低坑ꎬ使电机转速出现严重超调失控现象ꎮ2.2㊀基于模糊控制的避障算法模糊控制[14]的理论思想是利用微机的程序并根据控制经验来实现人的控制行为ꎮ本文基于模糊控制设计了一种三输入单输出的控制器ꎮ2.2.1㊀模糊控制器的输入和输出设计现设置模糊控制的输入量为I1㊁I2㊁I3ꎬ输出量为O1ꎮ其中I1㊁I2分别表示机器人左右2个方向的传感器探测到的障碍物距离ꎻI3表示机器人运动方向与目标点连线的角度ꎻO1表示机器人的转角ꎮ当目标物在机器人的右前方时ꎬI3取正数ꎬ反之I3取负数ꎻ当机器人向右转时ꎬO1取正数ꎬ反之O1取负数ꎮI1㊁I2的模糊集合为:{N(近)㊁M(中)㊁F(远)}ꎬ论域范围为(4cmꎬ50cm)ꎻI3的模糊集合为:{LB(左大)㊁LM(左中)㊁LS(左小)㊁ZO(零)㊁RS(右小)㊁RM(右中)㊁RB(右大)}ꎬ论域范围为(-180ʎꎬ180ʎ)ꎻO1的模糊集合为:{TLB(左大)㊁TLM(左中)㊁TLS(左小)㊁TZO(零)㊁TRS(右小)㊁TRM(右中)㊁TRB(右大)}ꎬ论域范围为(-50ʎꎬ50ʎ)ꎮ因高斯型函数曲线较为平整光滑ꎬ所以选取高斯函数作为隶属函数ꎬ在Simulink中设计模糊控制子模块ꎬ如图5所示ꎮ图5㊀避障模糊控制图Fig.5㊀Obstacleavoidancefuzzycontrolchart2.2.2㊀模糊控制规则的设计依据FuzzySet理论ꎬ模糊推理规则采用Mam ̄dani的max ̄min合成法ꎬ去模糊化采用重心法ꎬ模糊控制规则使用IF ̄THEN条件语句ꎬ制定了63条模糊规则[15]ꎬ见图6所示ꎮ图6㊀避障模糊控制图Fig.6㊀Obstacleavoidancefuzzycontrolchart2.2.3㊀模糊控制算法软件仿真预先在Matlab中设定机器人的起始点为(0ꎬ0)ꎬ目标点为(10mꎬ10m)ꎬ随机分布20个圆形障碍物ꎬ机器人与目标点的角度设为45ʎꎬ在预先设定的测距范围内ꎬ因此当障碍物的角度大于45ʎ时ꎬ障碍物即在机器人的左方ꎻ当机器人与障碍物的角度为45ʎ时ꎬ障碍物即在机器人的正前方ꎻ当机器人与障碍物的角度小于45ʎ时ꎬ障碍物即在机器人的右方ꎮ之后将测得的与障碍物的距离和与目标点的角度数据送入到模糊控制器中[16]ꎬ获得仿真效果图如图7所示ꎬ黑色实线为机器人实际运动路线ꎬ可知该算法能使机器人有效地避开障碍物同时到达目标点ꎮ10864200d /m286410d/m图7㊀机器人避障仿真结果图Fig.7㊀Robotobstacleavoidancesimulationresults2.3㊀控制系统软件设计开发软件采用Keiluvision5ꎬ首先编写每个模块的主程序ꎬ然后将各个模块组合起来ꎬSTM32开发板上电后对系统进行初始化ꎬ在主函数中执行主程883 南昌大学学报(工科版)2019年㊀序后等待中断信号ꎬ对中断进行执行相应的中断服务后便退出中断ꎮ系统主函数由前进函数和超声波感应函数组成ꎮ在前进函数中控制电机的转速ꎬ2个电机由STM32芯片的PWM波控制ꎮPWM波是采用微处理器的数字输出控制模拟电路的一种有效的技术ꎮ双向PWM是使用通道1和3的定时器TIM3渠道产生的ꎬ分别控制机器人的两履带轮旋转方向和前进速度ꎮ现以左电机为例分析了其运动控制ꎬ电机M+连接时ꎬ它是TIM3通道1ꎬ电机M与GPIO端口命名为PA4ꎬ假设需要机器人前进则需要TIM3所输出的PWM占空比大于20%ꎬ端口PA4应设置输出模式ꎬ并设置低电平ꎮ为此ꎬ能通过改变PWM占空比来改变电机的转速ꎮ如果电机需要反转ꎬ则端口PA4应设置高电平ꎬ同样可通过改变PWM占空比来实现电机的反向速度调节ꎻ而在超声波传感器感应函数中ꎬ当正前方出现障碍物时ꎬ会返回一个高电平给STM32[17]ꎬ然后触发中断程序执行相对应的避障算法ꎬ机器人默认向左偏移一定角度进行避障ꎬ此时机器人左边履带轮反向转动ꎬ右边履带轮正向转动ꎬ而左前方出现障碍物则机器人右转ꎬ反之机器人左转ꎬ当定时器中断函数触发后ꎬ超声波传感器模块会采集两边的距离信息ꎬ再使用程序中的模块控制算法和多级积分分离PID算法对机器人的转角和电机的转速进行控制ꎬ算法流程图如图8所示ꎮ3㊀机器人测试实验与分析㊀㊀为了验证履带式机器人的避障能力ꎬ实验使用左右方向的超声波传感器[18]对机器人与障碍物的距离信息进行了采集ꎬ将计算出来的距离通过AD转换后送入到STM32的MCUꎬ进行处理后将PWM波信号输送到电机驱动模块控制电机转速和转向ꎬ实现避障和前行ꎮ现实验针对避障进行实地实验ꎬ在左右靠墙边各放置1个长方体障碍物ꎬ实验机器人运动过程如图9(a)~(f)所示ꎮ实验结果表明ꎬ履带式机器人能有效躲避障碍物ꎬ在离障碍物大约35cm时能偏移一定角度进行避障ꎬ同时在避障过程中ꎬ电机速度能有所下降并且能快速响应ꎬ综上说明模糊控制和多级分离积分控制算法有效可靠ꎮ开始系统初始化主函数进入循环前方有无障碍物给超声波传感器发高电平定时器中断采集数据提取两边所测距离依据隶属度函数将距离信息模糊化并查询模糊规则将查询结果通过串口发送给STM32输出PWM波信号给电机驱动电路左边电机工作方式(正转、反转、停止)右边电机工作方式(正转、反转、停止)多级积分分离PID算法继续前进YN图8㊀算法程序流程图Fig.8㊀Algorithmprogramflowchart(a)t=0(b)t=2s(c)t=4s983 第4期㊀㊀㊀㊀㊀姚健康ꎬ等:履带式机器人避障自动控制系统设计(d)t=5s(e)t=7s(f)t=9s图9㊀履带式机器人避障运动过程Fig.9㊀Trackedrobotobstacleavoidancemovementprocess4㊀结论㊀㊀针对智能机器人系统ꎬ本文基于STM32实现了履带式机器人避障ꎬ仿真结果表明多级积分分离算法对电机转速控制更加可靠和稳定ꎬ协助完成了避障任务ꎻ而基于模糊控制的避障算法在仿真中能使机器人有效躲避障碍物并且到达目标点ꎬ在解决非线性机器人系统凸显了其优势ꎮ最后实验表明ꎬ履带式机器人能较为灵活地躲避左右两边障碍物并且避免与前方的防盗门相撞ꎬ满足了其稳定避障的需求ꎮ但遇到不规则的障碍物和进入到死角时ꎬ避障效果会大大下降ꎮ因此需要进一步完善模糊控制算法ꎬ结合多种传感器例如红外传感器㊁陀螺仪等来更加可靠地完成避障任务ꎬ同时对于行驶过程中的路径规划算法有待研究ꎮ参考文献:[1]㊀柴钰ꎬ王乔.粒子群优化模糊PID的履带机器人运动控制研究[J].现代电子技术ꎬ2018ꎬ41(18):49-53.[2]赵凯ꎬ董明明ꎬ刘锋ꎬ等.基于声信号的履带机器人地面分类试验研究[J].北京理工大学学报ꎬ2018ꎬ38(9):912-916.[3]占卓帆ꎬ钱瑞明.一种履带吸盘式清洁机器人自动配气机构设计和行走吸附力要求分析[J].机械设计与制造工程ꎬ2019ꎬ48(1):1-4.[4]金彦亮ꎬ朱容廷.机器人端到端视觉避障方法研究[J].工业控制计算机ꎬ2019ꎬ32(9):77-79.[5]吕淑平ꎬ王冲.自动避障实验小车教学系统设计[J].实验室研究与探索ꎬ2019ꎬ38(8):204-208.[6]王宜瑜ꎬ宋树祥ꎬ王斌.嵌入式系统的多路步进电机控制系统的设计[J].计算机测量与控制ꎬ2019ꎬ27(9):76-79ꎬ84.[7]王方.基于ROS的多履带全向移动机器人设计与实现[D].桂林:桂林电子科技大学ꎬ2018.[8]王瑾ꎬ王峰图ꎬ范华ꎬ等.基于STM32扫地机器人的设计与实现[J].国外电子测量技术ꎬ2018ꎬ37(11):100-103.[9]孟广耀ꎬ王振华ꎬ黄居鑫.双摆臂履带可变形机器人结构设计与越障性能研究[J].机械传动ꎬ2019ꎬ43(8):144-149.[10]黄祖延ꎬ柳振宝ꎬ王庆华ꎬ等.陆空两用履带式越障机器人的设计[J].电子世界ꎬ2019(10):170-171.[11]雄飞ꎬ刘泽周ꎬ曲林伟ꎬ等.某直流电机积分分离式PID控制策略研究[J].舰船电子工程ꎬ2018ꎬ38(10):62-64.[12]KLATZKYRLꎬGERSHONPꎬSHIVAPRABHUVꎬetal.Amodelofmotorperformanceduringsurfacepenetration:fromphysicstovoluntarycontrol[J].Experimentalbrainresearchꎬ2013ꎬ230(2):251-260.[13]曹法立ꎬ付远明ꎬ吴江涛.基于多级积分分离PID算法的温度控制系统[J].控制工程ꎬ2017ꎬ24(6):1107-1112.[14]佃松宜ꎬ梁伟博ꎬ赵涛.基于改进QPSO的两轮移动机器人区间二型模糊逻辑控制[J].控制与决策ꎬ2019ꎬ34(2):261-268.[15]黄漫国ꎬ樊尚春ꎬ郑德智ꎬ等.多传感器数据融合技术研究进展[J].传感器与微系统ꎬ2010ꎬ29(3):5-8ꎬ12.[16]张新锋ꎬ王奥特ꎬ陈建伟.基于模糊控制的纯电动汽车距离控制[J].江苏大学学报(自然科学版)ꎬ2019ꎬ40(5):524-530.[17]孙宏发ꎬ李昕涛ꎬ韩增强.基于STM32普及型变电站智能巡检机器人的设计[J].智能机器人ꎬ2019(4):71-75.[18]马强ꎬ王云ꎬ陈文淼ꎬ等.基于超声波与IMU融合的倒车测距算法[J].内燃机与动力装置ꎬ2019ꎬ36(4):31-35.093 南昌大学学报(工科版)2019年㊀。
分析履带机器人越障能力优化

0引言越来越多的行业开始应用履带机器人,减轻人力劳动的压力,提高工作效率。
履带机器人在实际工作中,需要铺设较长的电缆,设置大范围电磁屏蔽,遇到各种障碍,为履带机器人工作带来难题。
如部分地下电缆检查中,履带机器人工作期间频繁遇到障碍,如果不能很好地解决其越障能力,会威胁到履带机器人的工作安全。
越障能力的优化,涉及到机器人结构性能、设计参数以及越障性能等内容,因此在研究上具有一定难度,是当前履带机器人创新的重要课题。
根据履带式摆臂机器人展开越障能力优化研究,为履带机器人越障能力提升以及未来发展提出科学建议。
1剖析履带式摆臂机器人结构履带式摆臂机器人,主要包括气体检测装置、控制电路、驱动电机、关节摇臂、履带移动式底盘、可控制云台、传感系统、前后驱动轮、移动壳体、电源系统、摄像系统等。
履带机器人实际工作中必须及时进行气体检测,及时统计工作环境的温度、湿度与气体等参数变化,所以摆臂必须做到全方位移动[1]。
带动检测摄像机随时对周围环境加以探查,并且能够灵活转换检测角度。
履带式摆臂机器人工作环境复杂,特别是在电缆检查工作中,会面临爬楼梯、越过不同障碍区等现象,基本结果设计中增加履带前角,加强设计结构紧凑性,分别设置两个直流电机模块,强化防水能力,更好的完成涉水环境下的工作。
机器人主要材料为铝合金,总重量仅为13kg。
整体结构为全封闭式,两侧驱动轮分别属于两个电机,以此做到电缆检测中不同方向的不同检测运行状态。
面对电缆检测中的障碍区,通过前臂及时越过[2]。
2履带摆臂机器人运行原理分析优化履带摆臂机器人越障性能,必须掌握履带摆臂机器人在工作中的运行状态以及运动原理。
从水平面运动、制定越障路径等方面展开研究。
2.1机器人水平运行原理机器人正常工作以水平运动为主,水平运动中,履带机器人正常工作中关节履带、水平地面不会出现过度滑动现象,这期间履带机器人的运行速度为0,并且履带机器人速度、轮轴中心速度始终保持一致[3]。
一种多关节履带式机器人自主越障运动规划
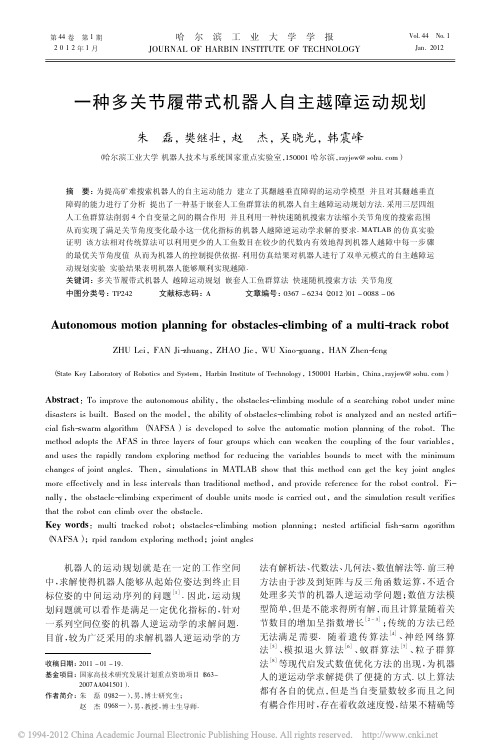
图4
双单元越障动作规划
2. 2
单单元越障模式 由上面分析可知, 对于高度小于 166 mm 的 垂直障碍可以采用单单元越障模式 , 如图 3 所示.
设机器人初始状态各个关节角度均为 0. 每一步 骤中由于只有一个角度是自变量, 因此很容易得 到各个角度在不同阶段与高度之间的关系 . 当抬起第 1 单元越障时( 如图 3 ( 1 ) 所示) , θ4 = arcsin( H - 0. 5h h , 2 2 ) + arctan L 0 . 25 h + 0 . 25 L4 4
收稿日期: 2011 - 01 - 19. 基金项目: 国家高技术研究发展计划重点资助项目 ( 8632007AA041501 ) . 作者简介: 朱 赵 磊( 1982 —) , 男, 博士研究生; 杰( 1968 —) , 男, 教授, 博士生导师.
法有解析法、 代数法、 几何法、 数值解法等. 前三种 方法由于涉及到矩阵与反三角函数运算, 不适合 处理多关节的机器人逆运动学问题; 数值方法模 型简单, 但是不能求得所有解, 而且计算量随着关 [2 - 3 ] ; 传统的方法已经 节数目Байду номын сангаас增加呈指数增长 [4 ] . 无法满 足 需 要 随 着 遗 传 算 法 、 神经网络算 [5 ] [6 ] [7 ] 法 、 模拟退火算法 、 蚁群算法 、 粒子群算 [8 ] 为机器 法 等现代启发式数值优化方法的出现, 人的逆运动学求解提供了便捷的方式. 以上算法 都有各自的优点, 但是当自变量数较多而且之间 有耦合作用时, 存在着收敛速度慢, 结果不精确等
杆件长度 / mm L1 = 412 . 5 L1 = 425 . 0 L3 = 465 . 0 L4 = 392 . 5
一种履带式机器人设计及其越障分析_朴春日

四摆臂式机器人比其他类型的履带式机器人能跨越 相对更 高 的 障 碍 物 ,因 为 它 有 前 、后 两 个 摆 臂 可 用 来 进行辅助越障,其越障的机理 是 利 用 机 器 人 的 履 带 行走机构将机器人抬升至障 碍 物 的 外 角 线,并 通 过 攀爬动作使机器人的质心越过障碍物的外角线完成 越障[5]。六 履 带 四 摆 臂 式 机 器 人 越 障 过 程 如 图 5 所示。
不易翻倒与卡 阻[2]。 国 内 的 一 些 履 带 式 机 器 人 采 用 拖缆供电通讯的形式,对其在管道中运行的灵活性产 生了一定的影响。
本文设计的六履带四摆臂机器人,旨在用于核工 业管道内壁情况的检查。由于管道内部环境复杂,有 台阶、碎 石 以 及 放 射 性 污 染,所 以 需 要 机 器 人 在 管 道 内具有较强的越障和跨沟能力,并具有无线遥控和图 像采集等功能。
图 3 控制系统结构
履带式机器人的通信系统对于整个系统的稳定 运行起着至关重要的作用。为了便于机器人的行动,
25
2013 年第 3 期
现代制造工程( Modern Manufacturing Engineering)
遥控计算机与机器人之间采用无线通信方式。机器 人的通信设备包括两个双工数据传输的无线通信模 块 FHL0611、无线影音发射模块 T505 和无线图像接 收模块 MR18_V2. 0,它们分别安装在主车体和中心控 制计算机上。无线通信模块采用 433MHz 的工作频率 和串行传输的工作方式,传输距离约为 150m。无线图 像传输模块采用 2. 4GHz 频率,可在 150m 范围内有效 地传输视频信号。 1. 2. 2 控制系统软件设计
欧洲航天局的固定履带式机器人 Nanokhod 移动 时与 地 面 有 很 好 的 摩 擦 因 数,稳 定 性 也 很 高,具 有 很 好的越障 能 力,且 结 构 简 单。 但 是,在 转 弯 时 会 存 在 很大的摩擦损失,机动性较差。美国 iRobot 公司生产 的 Packbot 系列机器人[1],采用了两条主履带和两条 摆臂履带的形式,因受到摆臂数量的限制只能攀爬高 度较低的障碍物。日本千叶工业大学研制的搜救机 器人“木槿”,采用两条主履带和前后两对独立摆动履 带的 形 式,且 两 条 主 履 带 较 宽,将 机 器 人 主 体 部 分 包 裹,形成全身履带机器人,可以在复杂的环境中行驶,
履带式越障机器人系统设计

履带式越障机器人系统设计王枭;王超星;刘淑晶【摘要】针对复杂地形环境的巡检作业,设计了一种履带式越障机器人.分析了复杂地形特点,确定了履带式越障机器人的系统方案,进而利用组件对机器人及越障机构进行了设计,并搭建了履带式越障机器人机械本体结构.基于BASRA主控板搭建了履带式越障机器人控制系统,并采用模块化的设计思想编写控制系统程序,进行了履带式越障机器人的越障性能试验.试验结果表明,履带式越障机器人可以顺利爬越2层台阶障碍物,为能够在复杂地形下进行巡检作业的机器人研究提供理论依据.【期刊名称】《新技术新工艺》【年(卷),期】2018(000)012【总页数】5页(P17-21)【关键词】履带式越障机器人;系统方案;机械本体结构;越障机构;控制系统;性能试验【作者】王枭;王超星;刘淑晶【作者单位】北京市大兴区第一中学,北京102600;三河市职教中心,河北三河065200;北京石油化工学院机械工程学院,北京102617【正文语种】中文【中图分类】TP242.2随着机器人技术的发展,机器人除了广泛应用于工业制造领域外,还应用于资源勘探、抢险救灾、医疗服务、军事和巡检等其他领域。
巡检机器人作为一种特种设备,可以代替人工在复杂的作业环境下完成巡检作业任务。
目前,主流的巡检机器人有履带式、轮式和混合式等,其中以履带式为主[1]。
从20世纪80年代起,国外就对小型履带式机器人展开了系统性研究,比较有影响的是美国的PackBot[2]机器人,URBOT、NUGV和TALON [3]机器人,其中,TALON系列机器人是一种传统的小型双履带式机器人,该机器人可根据任务的不同安装不同的任务模块,主要应用于执行侦察、危险品操作和救援等领域。
此外,英国研制的Supper Wheelbarrow排爆机器人、加拿大布鲁克大学研制的AZMUT机器人[4]、日本的Helios V机器人[5]都属于履带式机器人。
日本东京工业大学的T.Kamegawa等提出了一种搜救机器人,该机器人由多节双履带式模块车连接而成,能够进入狭窄的空间,相邻模块之间由2个主动自由度关节连接或3个随动自由度关节连接,所以该机器人结构形式具有很好的地面适应能力和越障能力[6]。
履带式抓抛机器人系统的设计与研究

履带式抓抛机器人系统的设计与研究目录1. 内容简述 (3)1.1 研究背景 (3)1.2 研究意义 (5)1.3 系统目标 (6)1.4 文献综述 (7)2. 履带式抓抛机器人系统总体设计 (8)2.1 系统结构与功能 (11)2.2 机械设计 (12)2.2.1 履带驱动系统 (14)2.2.2 机器人本体结构 (15)2.2.3 抓握机构设计 (16)2.3 控制系统设计 (18)2.3.1 硬件平台构成 (19)2.3.2 软件架构设计 (21)2.3.3 运动控制策略 (22)2.4 能量系统设计 (23)2.4.1 动力源选择 (25)2.4.2 能量存储与管理 (26)2.4.3 能量效率分析 (28)3. 履带式抓抛机器人关键技术研究 (29)3.1 轨迹规划与控制 (30)3.1.1 优化目标函数 (32)3.1.2 轨迹规划算法 (33)3.1.3 机器人运动控制 (34)3.2 视觉感知与识别 (35)3.2.1 视觉传感器选择 (36)3.2.2 目标检测与识别算法 (37)3.2.3 环境感知与理解 (39)3.3 抓握与抛掷控制 (40)3.3.1 抓握策略设计 (41)3.3.2 力反馈控制方法 (42)3.3.3 抛掷路径规划与精度控制 (43)4. 系统仿真与实验验证 (44)4.1 仿真环境搭建 (46)4.2 系统仿真与性能分析 (47)4.3 硬件平台搭建 (48)4.4 实验验证与结果分析 (49)5. 结论与展望 (50)5.1 研究结果总结 (52)5.2 未来研究方向 (53)5.3 技术应用前景 (54)1. 内容简述本文旨在探讨履带式抓抛机器人系统的的设计与研究,该系统旨在在各种复杂、多地形环境下执行抓取和抛掷目标物任务。
系统结构设计融合履带式车辆的优势与抓抛机械手臂的灵活性,实现稳定移动和精准操作能力。
文章首先介绍履带式抓抛机器人系统的应用背景和发展趋势,并对其关键性能指标进行阐述,例如越野能力、抓取力、抛掷精度等。
浅述智能救援履带式机器人

高考物理最新电磁学知识点之传感器全集汇编及解析(3)一、选择题1.如图所示是一个基本逻辑电路。
声控开关、光敏电阻、小灯泡等元件构成的一个自动控制电路。
该电路的功能是在白天无论声音多么响,小灯泡都不会亮,在晚上,只要有一定的声音,小灯泡就亮。
这种电路现广泛使用于公共楼梯间,该电路虚线框N中使用的是门电路.则下面说法正确的是()A.R2为光敏电阻,N 为或门电路B.R2为光敏电阻,N为与门电路C.R2为热敏电阻,N为或门电路D.R2为热敏电阻,N为非门电路2.科学家研究发现,磁敏电阻(GMR)的阻值随所处空间磁场的增强而增大,随所处空间磁场的减弱而变小,如图所示电路中GMR为一个磁敏电阻,R和为滑动变阻器,和为定值电阻,当开关和闭合时,电容器中一带电微粒恰好处于静止状态.则A.只调节电阻,当向下端移动时,电阻消耗的电功率不变B.只调节电阻,当向下端移动时,带电微粒向下运动C.只调节电阻R,当向右端移动时,电阻消耗的电功率变小D.只调节电阻R,当向右端移动时,带电微粒向下运动3.电视机遥控器是用传感器将光信号转化为电流信号。
下列属于这类传感器的是A.走廊中的声控开关 B.红外防盗装置C.热水器中的温度传感器 D.电子秤中的压力传感器4.近年来,酒驾几乎成为一种“社会公害”, 2011年我国首次将醉酒驾车规定为犯罪,并于5月1日正式实施。
交警用来检测酒驾的酒精测试仪的工作原理如图所示,其中是半导体型酒精气体传感器,该传感器的电阻的倒数与酒精气体的浓度成正比,为定值电阻。
以下关于电流表的示数与酒精气体浓度之间的关系的图像,正确的是()A. B.C. D.5.每当地震发生后,各路救援人员及时深入灾区,与死神抢时间,争分夺秒抢救被埋人员,有些救援队借助“生命探测仪”可以发现深埋在废墟中的伤员,根据所学知识,你认为“生命探测仪”可能用到了()A.振动传感器 B.压力传感器C.红外线传感器 D.电容传感器6.与一般吉他以箱体的振动发声不同,电吉他靠拾音器发声。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引言
移动机器人 一 般 分 为 轮 式、腿 式、履 带 式 和 复 合 式等。履带式机器人的履带结构可以使机器人适应 多种复杂的路面情况。因为履带式机器人在爬坡、越 障和跨壕沟等方面具有优越性,常被应用于军事、消 防以及核工业等领域。典型的履带式机器人可分为 固定履带式机器人和摆臂履带式机器人。摆臂履带 式机器人根据摆臂的数量可分为四履带双摆臂机器 人和六履带四摆臂机器人。
Design of a tracked robot and analysis of its obstacle-climbing
Piao Chunri,Yan Guozheng,Wang Zhiwu,Liu Hua,Jiang Pingping ( Department of Instrument Science and Engineering,Shanghai Jiaotong University,Shanghai 200240,China)
图 5 六履带四摆臂式机器人越障过程
六履带四摆臂式机器人越障过程如下。 第 1 步: 机器人抬起前摆臂同时前进,使前摆臂前 端能够搭在障碍物边缘上。 第 2 步: 机器人下转前摆臂撑起机器人同时前进, 使主车体前轮能够搭在障碍物边缘上。 第 3 步: 当障碍物较低时直接前进; 当障碍物较高 时,下转后摆臂撑起机器人同时前进。 在第 1 步中,履带式机器人从远处驶向障碍物,完 全抬起前摆臂的时间要小于机器人行驶到障碍物底 端的时间,防止机器人与障碍物发生碰撞。在第 2 步 中,机 器 人 前 摆 臂 下 摆 的 摆 角 要 足 够 大,否 则 机 器 人 质心较低,难以把主车体前轮抬升至障碍物边缘。在 第 3 步中,机器人质心的竖直线越过障碍物边缘时,会 发生 向 前 的 翻 转,需 要 前 摆 臂 下 摆 支 撑 机 器 人,缓 解 机器人与障碍物上平面碰撞产生的冲击和振动。 2. 2 履带式机器人越障高度分析[5] 当机器人遇 到 较 高 的 障 碍 物 时,通 过 转 动 前、后 摆 臂,使 机 器 人 质 心 的 竖 直 线 与 障 碍 物 边 缘 线 共 线, 则机 器 人 可 以 成 功 越 障,此 时 前 摆 臂 水 平 放 置,临 界 位置如图 6 所示。 在 越 障 临 界 位 置 ,机 器 人 前 摆 臂 水 平 放 置 ,建 立 如图 6 所 示 的 坐 标 系 XOY,设 主 车 体 质 心 坐 标 为 G1 ( l,h) ,l、h 分别为主车体质心的 x、y 坐标值; 主车 体质量为 m1 ,仰角为 α,前后轮的轴心距为 L1 ; 机器 人质心坐标为 G ( x,y) ,主、从 动 轮 半 径 为 R,前、后 小轮半径为 r; 设机器人前、后摆臂尺寸相等,摆臂长 为 L2 ,转角分别为 α、β,质心分别为 G2 、G3 ,质量分别
26
四摆臂式机器人比其他类型的履带式机器人能跨越 相对更 高 的 障 碍 物 ,因 为 它 有 前 、后 两 个 摆 臂 可 用 来 进行辅助越障,其越障的机理 是 利 用 机 器 人 的 履 带 行走机构将机器人抬升至障 碍 物 的 外 角 线,并 通 过 攀爬动作使机器人的质心越过障碍物的外角线完成 越障[5]。六 履 带 四 摆 臂 式 机 器 人 越 障 过 程 如 图 5 所示。
设计时,主 车 体 要 密 封,内 部 能 装 下 驱 动 机 构 和 电动机。控 制 系 统 和 摄 像 头 置 于 主 车 体 外,便 于 拆 卸。主车体两侧履带和摆臂履带内都装有支撑轮和 压紧轮,便于履 带 固 定 位 置 和 提 高 车 体 运 行 的 稳 定 性,履带式机器人侧视图如图 1 所示。
图 3 控制系统结构
履带式机器人的通信系统对于整个系统的稳定 运行起着至关重要的作用。为了便于机器人的行动,
25
2013 年第 3 期
现代制造工程( Modern Manufacturing Engineering)
遥控计算机与机器人之间采用无线通信方式。机器 人的通信设备包括两个双工数据传输的无线通信模 块 FHL0611、无线影音发射模块 T505 和无线图像接 收模块 MR18_V2. 0,它们分别安装在主车体和中心控 制计算机上。无线通信模块采用 433MHz 的工作频率 和串行传输的工作方式,传输距离约为 150m。无线图 像传输模块采用 2. 4GHz 频率,可在 150m 范围内有效 地传输视频信号。 1. 2. 2 控制系统软件设计
图 1 履带式机器人侧视图
1. 前小轮 2. 摆臂支撑轮 3. 主动轮 4. 摆臂压紧轮 5. 摆臂履带 6. 主履带 7. 主履带支撑轮 8. 主履带压紧轮 9. 从动轮 10. 后小轮
控制水平 运 动 的 左、右 两 个 主 动 轮 分 别 置 于 主 车体的前端和后端。行走机构中一侧履带采用前轮 驱动、后轮从动的形式,另 一 侧 履 带 采 用 后 轮 驱 动、 前轮从动的形式,这种中心对 称 的 结 构 方 便 了 内 部 电动机布局,并提 高 了 机 构 的 稳 定 性。为 了 使 其 在 500mm × 500mm 以上尺寸 的 矩 形 管 内 行 驶 自 如,机 器人本体结构设计尽可能紧凑[4],机 器 人 机 构 长 × 宽 × 高的外形尺寸为 630mm × 300mm × 145mm。履 带式机器人机构简图如图 2 所示。
机器人的驱动通过四个电动机来实现,其中两个 电动机分别控制机器人前摆臂和后摆臂,另外两个电 动机分别驱动主车体两侧的两个主动轮。当履带式
* 上海市科委科研计划资助项目( 09DZ1907400)
24Biblioteka 朴春日,等: 一种履带式机器人设计及其越障分析
2013 年第 3 期
机器人在平地行驶时,行驶阻力( 相应的是驱动力) 比 较小,最大只有 0. 2G,G 为机器人整体重力,而最大阻 力发生在机器人上坡、转弯和撑起时。为保证机器人 的正常工作,主驱动电动机应能满足各种工作情况下 的需要[3]。选用 Maxon 公司配备编码器的直流伺服 电动机( RE40 石墨电刷) 作为机器人本体的驱动电动 机,并配套使用减速比为 124∶ 1的减速器,来增大输出 扭矩,电动机的额定功率为 150W( 没有把效率计算在 内) ,额定电压为 48V。
1 履带式机器人设计
1. 1 履带式机器人机械结构设计 根据机器人的应用环境,要求所设计的机构体积
小、重量轻、协 调 性 好 且 稳 定 性 高。 为 了 提 高 履 带 式 机器人的越障和跨沟能力,采用六履带四摆臂式的行 走机构,四个摆臂两两连接在一起分别置于主车体的 前端和后端。通过主车体、前摆臂和后摆臂三个部分 相对运动的协调配合来完成要求的作业任务。
控制系统工作时,由上位机通过无线通信模块以 串行方式发送 控 制 代 码,用 来 控 制 四 个 电 动 机 的 转 向、转速和转角。电路控制系统的主控芯片接收到控 制代码后把它分成四部分,并以 SPI 方式依次传送给 四个从控芯片。从控芯片根据接收到的指令完成电 动机控制和电动机速度、位置参数的采集工作。从控 芯片软件流程图如图 4 所示。
考虑到机器人工作环境,机器人必须采取一定的 措施防止恶劣环境中污水的渗入和侵蚀。因此在履 带式机器人组装过程中,防腐和密封是装配过程中需 要考虑的重要问题。在材料选择时,外壳与套筒选用 铝合金材料; 其他齿轮及驱动轮等采用表面进行发黑 防锈处理的 45 钢; 主动轴及其他轮轴均采用合金钢。 此外,在 设 计 中 还 使 用 了 不 锈 钢 紧 固 件,如 不 锈 钢 螺 栓及螺母、特 殊 轴 承、铅 封 及 锌 层 等 附 件。 提 高 了 履 带式机器人的使用寿命。
不易翻倒与卡 阻[2]。 国 内 的 一 些 履 带 式 机 器 人 采 用 拖缆供电通讯的形式,对其在管道中运行的灵活性产 生了一定的影响。
本文设计的六履带四摆臂机器人,旨在用于核工 业管道内壁情况的检查。由于管道内部环境复杂,有 台阶、碎 石 以 及 放 射 性 污 染,所 以 需 要 机 器 人 在 管 道 内具有较强的越障和跨沟能力,并具有无线遥控和图 像采集等功能。
欧洲航天局的固定履带式机器人 Nanokhod 移动 时与 地 面 有 很 好 的 摩 擦 因 数,稳 定 性 也 很 高,具 有 很 好的越障 能 力,且 结 构 简 单。 但 是,在 转 弯 时 会 存 在 很大的摩擦损失,机动性较差。美国 iRobot 公司生产 的 Packbot 系列机器人[1],采用了两条主履带和两条 摆臂履带的形式,因受到摆臂数量的限制只能攀爬高 度较低的障碍物。日本千叶工业大学研制的搜救机 器人“木槿”,采用两条主履带和前后两对独立摆动履 带的 形 式,且 两 条 主 履 带 较 宽,将 机 器 人 主 体 部 分 包 裹,形成全身履带机器人,可以在复杂的环境中行驶,
机器人
现代制造工程( Modern Manufacturing Engineering)
2013 年第 3 期
*
一种履带式机器人设计及其越障分析
朴春日,颜国正,王志武,刘华,姜萍萍 ( 上海交通大学仪器科学与工程系,上海 200240)
摘要: 针对核工业管道内壁情况的检测,设计了一种六履带四摆臂式移动机器人。该机器人具有越障、跨沟、无线遥控 和图像采集等功能。详细介绍了履带式机器人机械结构和控制系统的设计过程,并对制作的机器人进行了越障性能分 析和相关实验验证。 关键词: 履带式机器人; 控制系统; 越障 中图分类号: TP242. 2 文献标志码: A 文章编号: 1671—3133( 2013) 03—0024—04
履带式 机 器 人 的 人 机 交 互 界 面 采 用 上 位 机 的 LabView 软件编写,这样便于对机器人的操作。人机 界面主要包括机器人水平运动控制、摆臂姿态控制和 视频显示三部分。
图 4 从控芯片软件流程图
2 履带式机器人越障分析
2. 1 履带式机器人越障过程分析 越障是履带式机器人的基本功能之一。六履带
Abstract: For the detection of the inner wall of the pipes in the nuclear industry,a mobile robot of six tracts and four arms was designed. The system contains functions of obstacle-climbing,wireless control and image acquisition. Introduces the design of the mechanical structure and control system in details,then analyzes the obstacle-climbing of the robot and tests it in experiments. Key words: tracked robot; control system; obstacle-climbing