虚功(虚位移)原理复习与例题共50页
第11章 虚位移原理—习题(1~17)

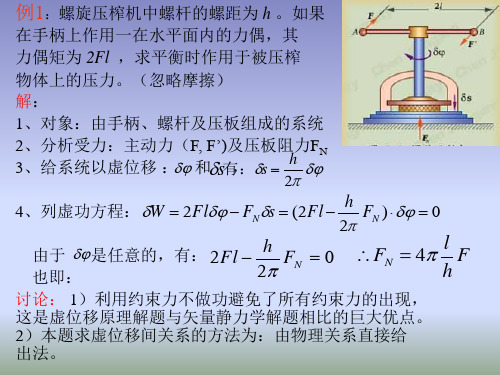
第11章 虚位移原理——习题1~1711-1 图示平面机构,圆盘的半径为r ,可绕其中心轴转动,直杆BC 和BD 的长度为l 1 = 2r ,直杆AB 的长度为l 2 = 3r ,试建立图示位置圆盘的虚转角θδ与滑块C 的虚位移C r δ之间的关系。
(题11-1答案:)11-2 在图示平面机构中,O 1A = AB = r ,O 2C = 2r ,BD = 4r ,C 为杆BD 的中点,试建立图示位置杆O 1A 的虚转角1δθ与杆O 2C 的虚转角2δθ之间的关系。
(题11-2答案:)11-3 如图所示曲柄摇杆机构,已知OA = OB = l ,试建立图示位置两杆虚转角之间的关系。
(题11-3答案:)11-4 在图示平面机构中,半径为R = 2r 的四分之一细圆环BD ,其上套一套筒A ,套筒与可绕轴O 转动的直杆OA 铰接,OA 的长度为l = 3r ,试建立图示题11-1图题11-2图位置杆OA 的虚转角与点D 的虚位移之间的关系。
(题11-4答案:)11-5 在如图所示平面机构中,O 1A = O 3C = O 3D = AB = l ,在图示位置,CB = O 2B =l 332,试建立该位置A 、D 两点虚位移之间的关系。
(题11-5答案:)11-6 在图示平面机构中,ABD 为边长等于a 的正三角形平板,O 1B 、O 2D 的杆长也均为a 。
机构在图示位置时,杆OE 与水平线成60◦角,A 、D 、O 2在同一水平线上,O 1B 位于铅垂位置,且OA = a ,试求此瞬时刚体O 1B 与OE 的虚转角之间的关系。
题11-3图题11-4图题11-5图题11-6图(题11-6答案:)11-7 在图示平面四连杆机构中,在杆AB 上垂直地作用有三角形分布载荷,其最大集度为q ,在杆OA 的中点作用有水平向左的主动力F ,且F = ql ,若不计各构件自重和各接触处摩擦,为使系统在图示位置平衡,所需施加的作用于杆BC 上的主动力偶矩M 的值。
5-3虚位移原理

出现任何约束反力。
虚位移原理给出了区别质系的真实平衡位置与约
束所容许的可能平衡位置的准则或判据 。
虚位移原理可求解质系的各类平衡问题:
系统在给定位置平衡时主动力之间的关系
求系统在已知主动力作用下的平衡位置 求系统在已知主动力作用下平衡时的约束反力
解题步骤
1. 确定研究对象:整体 2. 约束分析:是否理想约束? 3. 受力分析:
作用三个力 Pi ,求平衡时 Pi 与 Si (i 1,2,3) 的关系 (设液体为不可压缩的)。
P1
P2
S2
S3
S1
Байду номын сангаас
P3
无穷多个质点组成的非刚体的平衡
解
塞i 的虚位移为 δri ,方向如图。 液体不可压缩
δr3
S δr 0
i 1 i i
3
P1
P2
1 ( S1δr1 S 2δr2 ) S3
(P 1 P 2 )δr 2 W P 1 (tan tan ) δr 3y 0
P 1 P 2
W P 1 (tan tan )
P1
δr1
1
3
δr2
2
P2
W δr3
例4
在压缩机的手轮上作用一力矩 M。手轮轴的两端各 有螺距同为 h、但螺纹方向相反的螺母 A 和 B,这两 个螺母分别与长为 a 的杆相铰接,四杆形成菱形框, 如图所示。 此菱形框的点 D固定 不动,而点C连接在 压缩机的水平压板上。 求当菱形框的顶角等 于2 时,压缩机对被 压物体的压力。
例5
已知:a, P, M; 求:约束反力NB
a
a
M A
第14章 虚位移原理_例题
弹簧原长 (600 300 )mm
弹簧后来长
(600
300 cos
)mm
弹簧缩短
(
300 cos
300 )mm
弹簧力 F
k
(
300
ቤተ መጻሕፍቲ ባይዱcos
300 )
由虚 位移原理:
M • F •ra F •rB 0 M Frr 0 0
[M
1.5(
1 cos
1)
0.3
sin cos2
0] 0
解: 对系统:建立坐标系和受力分析 解析法:
yK 6l sin yK 6l cos (1)
虚功方程:M W 6l cos 0 (2)
所以: M 6Wl cos
例6: 书14-5
当OC绕轴O摆动时,滑块A沿曲柄滑动,从而带动杆AB在导槽
内移动,不计各构 件自 重与各处摩擦。OC a,OD l
rB 2a (2)
列虚功方程:
M PrD FBxrB 0
(3)
将(1)(2)代入(3),得:
M Pa FBx 2a 0
FBx
1 M 2 a
P
(2)求B 铰的垂直约束力: 解除B 铰的垂直约束,代之以垂直力 FBy 。 杆BCD 的速度瞬心在A
rD 5a
rB 2a
M PrD
F
、F
给出力
P
、
F
处的虚位移 rD、rB
几何法: rC cos rD
C
rC cos(90 2 ) rB cos
A
θ
θ rC D F
Fθ
rB
B
由虚功原理 PrD FrB 0 0
PrC cos F 2sinrC 0 (P cos 2F sin )rC 0
理论力学-虚位移原理

第六章 虚位移原理
§6-3 虚位移·自由度
虚位移
虚位移与实位移的区别:
●与实际发生的微小位移(简称实位移)不同,虚位移是纯 粹几何概念,是假想位移,只是用来反映约束在给定瞬时的 性质。它与质点系是否实际发生运动无关,不涉及运动时间、 主动力和运动初始条件。
●虚位移仅与约束条件有关,在不破坏约束情况下,具有任 意性。而实位移是在一定时间内真正实现的位移,具有确定 的方向,它除了与约束条件有关外,还与时间、主动力以及 运动的初始条件有关。
按照约束对质点系运动限制的不同情况,可将约束分类如下:
1.完整约束和非完整约束
其约束方程的一般形式为
fj( x 1 ,y 1 ,z 1 ;..x n , .y n ;,z n ;x 1 ,y 1 ,z 1 ,..x n. ,y n ;,zn;t)0 (j1,2,...s,)
式中n为系统中质点的个数,s为约束方程的数目。
第六章 虚位移原理
§6-1 概 述
虚位移原理是质点系静力学的普遍原理,它将 给出任意质点系平衡的充要条件,这和刚体静力学 的平衡条件不同,在那里给出的刚体平衡的充要条 件,对于任意质点系的平衡来说只是必要的,但并 不是充分的(参阅刚化原理)。
第六章 虚位移原理
§6-1 概 述
非自由质点系的平衡,可以理解为主动力通过约束的 平衡。约束的作用在于:
fj(x 1 ,y 1 ,z 1 ;.x .n ,.y n ;,z n ;t) 0 (j1,2,..s.),
第六章 虚位移原理
§6-2 约束和约束方程
1. 完整约束和非完整约束
y
A
完整约束
约束方程:
x
yA r
第十四章-虚位移原理讲义
第十四章-虚位移原理讲义-CAL-FENGHAI.-(YICAI)-Company One1第十四章虚位移原理一、回顾:液压升降台如图所示,求油压举升缸筒的拉力。
本题目是物体系平衡问题。
图(a)1.取缸筒为研究对象∑M G(F)=0 求出F E2.取CG、DE+缸筒为研究对象∑M C(F)=0 求出F Dy(b)(c)23.取整体为研究对象∑M A(F)=0 求出F B4.取杆BD为研究对象∑M K(F)=0 求出F Dx(d)(e)5.取杆DE为研究对象∑M O(F)=0 求出F JH由上分析可知:(1)用静力学中求解物体系统平衡问题的方法求解,需要选取5次研究对象,列5个方程,求解过程较为复杂。
(2)运算过程中出现了4个题目并不需要求解的约束反力,称之为中间变量,消除这些约束反力,才能得到要求的量。
问题有无别的方法求解物体系统的平衡问题而这种方法又能避开求这些中间变量,简化求解过程。
二、求解物体系统的平衡问题的两种方法⑴用静力平衡方程求解----刚体静力学(几何静力学)⑵用虚位移原理求解----分析静力学3虚位移原理是应用功的概念分析系统的平衡问题,是研究静力学平衡问题的另一途径。
对于只有理想约束的物体系,由于约束力不作功,有时应用虚位移原理求解更为方便。
三、利用虚位移原理求解的平衡问题一般有如下几个特点:⑴结构特点-----结构为几何可变体系⑵待求量特点-----数目较少⑶研究对象的选取-----取整体即可求解四、基本概念几何可变体系-----约束允许系统动几何不变体系-----约束不允许系统动举例:图图如图所示,约束允许结构动,受力后可以不动,该结构为几何可变体系。
如图所示,约束不允许结构动,受力后仍然不动,该结构为几何不变体系。
对于几何不变体系,只要解除某些约束,用约束力代替约束的作用,即可将不变体系变为可变体系。
约束·虚位移·虚功一、约束及其分类4(1)概念约束——限制质点或质点系运动的条件。
理论力学2虚位移原理

7
2. 解析法 适用于完整、定常、双面约束
例:求A和B两点的虚位移
O
x
解:选1、2为系统的广义坐标,直角坐标原
点选在固定点O,则A、B坐标可表示为:
a
1 A(x1, y1)
x1 a sin1 y1 a cos1
x2 a sin1 b sin2 y2 a cos1 b cos2
y
2 b B(x2, y2)
0
m3 g
i 1
1. 分析主动力作用点的虚位移
2. 求主动力的虚功之和
14
rA
A
rC1
m1 g
M
O
rC2
m2g
rB
BF
解:
W 0
Fr M 0 m3 g B
rA rB rA rB L
FL M (FL M ) 0 0
LF M 0 M L F
15
例: 图示椭圆规机构,连杆A、B长为l,,杆重和摩擦力不计,
0
i 1
广义力及以广义力表示的质系平衡条件
k
Q jq j 0
j 1
广义力
任意点的虚位移与广义坐标虚位移的关系:
xi yi
zi W
xi
q1
yi
q1
zi
q1
n
i 1
q1
xi q2
q1
yi q2
q1
zi q2
r Fi
•
r ri
q2 q2 q2
L L L
n i 1
xi qk
r m2 g
解:根据虚位移原理
2
{Fixxi Fiyyi} 0
x1 l1 cos y1 l1 sin x2 l1 cos l2 cos y2 l1 sin l2 sin
虚功及虚功原理结构位移计算的一般公式图乘法及举例温度改资料讲解

§6-1 静定结构位移
a)验算结构的刚度;
1、计算位移有三个目的: b)为超静定结构的内力分析打基础;
§6-3 单位荷载法
(位移计算的一般公式)
t1
F2 K ΔKH
e g k t2
W 1 = 2F N 1 2 d + s F S 1 2 d + s M 1 2 ds F1
K‘
需首先虚拟力状态
Ε2γ2κ2
在欲求位移处沿所求位移方向
位移状态 2
加上相应的广义单位力F=1
( ) 1×D + R c =
柱
F
F
C
F
D
F/2
F
F/2
A
4.5F
3.0F
B
0.287l E 0.222l
G
0.25l
0.25l
2F
2F
1
C
3)求 FN 4)求ΔC
D
00
F
DC =
FNFNPl A
1.50
EA
1/2
E
1.50
G
B 1/2
材料 钢筋 混凝土
钢筋
杆件 FNP
FN F N p l
A
AD -4.74F -1.58 0.263l
Δ12
Δ22
再加F2,F2在自身引起的位移Δ22上作的功
W22=1/2F2Δ·22
F dW
O
Δ11
B F1 Δ A
理论力学15-2虚功原理N

F
x B
y
x
若用几何法分析虚位移: 几何法分析虚位移,无需 对AB 杆,δrB方向如图, 设定坐标系。 由协调关系,δyC方向如图。 两虚位移在BC杆方向投影应相等: rB cos(2 90) rC cos(90 ) rB sin 2 rC sin 两虚位移关系: rC 2rB cos 用虚功方程 (FCy视为主动力) FCy (rC ) F (rB cos(90 )) 0
2 rD rE 3
3 r2 rE 4
四) 用虚功方程 ( Fi ri ) 0 10 r1 FD (rD ) 6 r2 3(- ) 0 3rE rE rE 2rE rD r1 r2
3 3 6 4 1 2 3 1 [10 FD ( ) 6 3( )]rE 0 3 3 4 6 FD 11(kN ) ( )
四、虚位移原理应用
一) 用虚位移原理求平衡位置的主动力
基本步骤: 1. 受力分析 画出全部可作虚功的主动力; 2. 虚位移分析 1) 变分法:建坐标系,列出虚位移点的坐标, 进行变分计算,建立虚位移之间的关系。 2) 几何法:根据虚位移的协调关系及虚位移的 投影关系,建立虚位移之间的关系。 3. 使用虚位移原理:
若求B点约束反力,虚位移图?
若求A点约束反力,虚位移图?
二) 用虚位移原理求平衡时的约束反力 虚位移原理是作用于质点系上所有主动力在任 何虚位移中所作虚功之和为零。 它与约束反力无关,似乎无法求约束反力。 若用该原理求约束反力,可沿所求约束反力方 向解除相应约束,并用一假想的主动力代替。 再用虚位移原理,求出该假想施加的“主动 力”,仍可得到对应的约束反力。