最新2小时认识能力风暴个人机器人文档汇总
能力风暴机器人

目录第一章欢迎进入个人机器人时代................ 错误!未定义书签。
. 个人机器人时代........................ 错误!未定义书签。
. 在学校应用能力风暴个人机器人.......... 错误!未定义书签。
第二章让你的个人机器人动起来................ 错误!未定义书签。
. 打开包装.............................. 错误!未定义书签。
. 了解能力风暴个人机器人................ 错误!未定义书签。
. 检测能力风暴.......................... 错误!未定义书签。
. 连接能力风暴.......................... 错误!未定义书签。
. 使用JC编程环境........................ 错误!未定义书签。
. 让能力风暴跳舞........................ 错误!未定义书签。
第三章感觉、大脑与驱动器.................... 错误!未定义书签。
. 个人机器人的三大要素.................. 错误!未定义书签。
. 能力风暴的传感器及其处理电路.......... 错误!未定义书签。
碰撞传感器......................... 错误!未定义书签。
红外传感器......................... 错误!未定义书签。
光敏传感器......................... 错误!未定义书签。
麦克风............................. 错误!未定义书签。
光电编码器......................... 错误!未定义书签。
其他传感器......................... 错误!未定义书签。
. 能力风暴的计算机硬件.................. 错误!未定义书签。
能力风暴仿真机器人培训PPT课件
感谢聆听
不足之处请大家批评指导
Please Criticize And Guide The Shortcomings
演讲人:XXXXXX 时 间:XX年XX月XX日
轮子 计算
直行 转向 启动电机 延时等待 停止电机
执行器 模块
显示 设置眼睛
仿真机器人培训
认识传感器
传感器功能 根据所要完成任务的环境中所有情况的检测结果做出后
续将要执行的动作。
检测什么
光 色 声 物
用什么检测 (传感器) 亮度检测 地面检测 声音检测
碰撞检测 红外检测
什么在变 (变量的含义)
光线强弱
等于:= = (从左往右读,用于比较判断,还有!= < >
如:x==2 读作:X等于2吗? 2、三种循环的异同
>= )
入口 入口 入口
循环条件
循环体
循环体
循环体
共性:
1.有入有出 2.循环条件+循环体 3.循环若干次
出口 出口 出口
仿真机器人培训
内设自动计数器
执行过程
循环+条件 又叫直到循环
主程序
起点---路线---终点 ……
仿真机器人培训
如何走?
何时走? 起点标志 听声音
按一定的轨迹走 寻线走 避障走 寻光走、绕光走
何时停? 终点标志 听声音
走多久?---计时 碰到几次标志?--计数
仿真机器人培训
让机器人在空场地中走一个正方形、正六边形, 思考转角是多少度?走正n边形呢?
初始变量
否 条件成立?
是 需反复地操作
处理变量
直到不满足条件
重复执行无数 次,注意出口 (循环体条件)
第一部分 认识AS-UII机器人
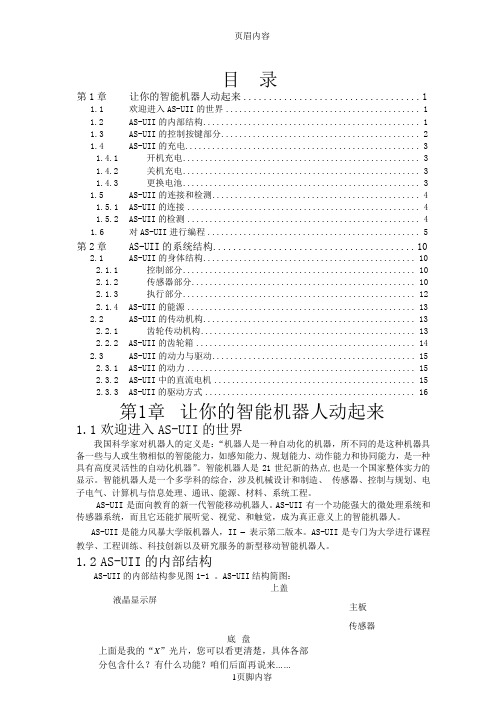
目录第1章让你的智能机器人动起来 (1)1.1 欢迎进入AS-UII 的世界 (1)1.2 AS-UII 的内部结构 (1)1.3 AS-UII 的控制按键部分 (2)1.4 AS-UII 的充电 (3)1.4.1 开机充电 (3)1.4.2 关机充电 (3)1.4.3 更换电池 (3)1.5 AS-UII 的连接和检测 (4)1.5.1 AS-UII 的连接 (4)1.5.2 AS-UII 的检测 (4)1.6 对AS-UII 进行编程 (5)第2章AS-UII 的系统结构 (10)2.1 AS-UII 的身体结构 (10)2.1.1 控制部分 (10)2.1.2 传感器部分 (10)2.1.3 执行部分 (12)2.1.4 AS-UII 的能源 (13)2.2 AS-UII 的传动机构 (13)2.2.1 齿轮传动机构 (13)2.2.2 AS-UII 的齿轮箱 (14)2.3 AS-UII 的动力与驱动 (15)2.3.1 AS-UII 的动力 (15)2.3.2 AS-UII 中的直流电机 (15)2.3.3 AS-UII 的驱动方式 (16)第1章让你的智能机器人动起来1.1 欢迎进入AS-UII 的世界我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器”。
智能机器人是21 世纪新的热点,也是一个国家整体实力的显示。
智能机器人是一个多学科的综合,涉及机械设计和制造、传感器、控制与规划、电子电气、计算机与信息处理、通讯、能源、材料、系统工程。
AS-UII 是面向教育的新一代智能移动机器人。
AS-UII 有一个功能强大的微处理系统和传感器系统,而且它还能扩展听觉、视觉、和触觉,成为真正意义上的智能机器人。
AS-UII 是能力风暴大学版机器人,II –表示第二版本。
1.3 简介能力风暴机器人仿真系统

1.3 简介能力风暴机器人仿真系统学习智能机器人,除了需要具备机器人硬件外,还需要为机器人编写控制程序,并在场地上进行反复调试。
但如果手边暂时既无机器人实物,又无真实场地,我们还能学习和研究机器人吗?答案是可以的。
能力风暴机器人为我们提供了一套仿真的VJC系统软件,在这个仿真系统中,我们不仅可以为机器人编写各种控制程序,同时还可以将编制的程序下载到仿真的机器人上,并在仿真的场地中进行模拟运行和调试,体验机器人控制的全过程。
本节我们就来认识VJC系统仿真版软件,学习构建仿真场地和仿真调试的方法。
1.3.1 认识VJC系统仿真版软件1.VJC系统仿真版软件的安装安装VJC系统仿真版的方法很简单,先打开本书配套光盘上的“VJC系统软件\VJC1.5仿真版”文件夹,找到名为“setup.exe”的安装程序,用鼠标双击该文件,系统自动将其安装到C盘中,并在Windows桌面上自动生成一个“VJC1.5仿真版”的快捷方式图标,软件安装的路径默认为:C:\program files\VJC1.5仿真版。
如果我们使用的计算机中已经安装了VJC系统仿真版,则安装这一步可以跳过不做。
2.VJC系统仿真版软件的启动及主界面当需要进入VJC系统仿真版编程时,只要双击桌面上的“VJC1.5仿真版”快捷方式图标,就可进入VJC的编程环境。
VJC编程环境的主界面见图1-3-1。
可以看出,主界面包含了以下几个部分:(1)菜单栏及工具栏:位于窗口上方,工具栏上除了新建、打开、保存等常规按钮外,还有仿真、JC代码、缩放等按钮,见图1-3-2所示。
(2)模块库:位于窗口左侧,共有五大类模块库,其中:执行器模块库包含了基本动作模块,这是控制机器人运动的基本模块;传感器模块库包含了基本的传感器检测模块,如:“红外检测”、“碰撞检测”等,用于感知周围的环境信息;控制模块库包含了循环、分支等程序控制模块,用于控制程序的结构;程序模块库包含了新建子程序、结束图标等;AS 多功能扩展卡包含了扩展应用的一些功能模块。
第2章 能力风暴机器人的结构

自检程序selftest.jc
/* Definitions of the registers in the MC68HC11E1 int porta = 0x1000; int pioc = 0x1002; int portc = 0x1003; int portb = 0x1004; int portcl = 0x1005; int ddrc = 0x1007; int portd = 0x1008; int ddrd = 0x1009; int porte = 0x100A; int cforce = 0x100B; int oc1m = 0x100C; int oc1d = 0x100D; int tcnt = 0x100E; int tic1 = 0x1010;
检测是否连接成功
如果程序不能正常下载,可能有以下6个方面 的原因: 1)能力风暴的主开关未打开。 2)电池电压不足。 3)机器人型号设置不正确。 4)该串口硬件有问题。 5)能力风暴操作系统被破坏。 6)串口线头过松,接触不检程序selftest.jc。 自检项目。给机器人检查身体,共有九 个项目,如下表所示:
第二章 能力风暴机器人的结构(综述)
内容简介
能力风暴机器人的认识 机器人的结构及工作原理 微控制器 外部存储器 执行器
2
打开包装箱,里面有:能力风暴机器人 一台,串口通信线一根,充电器一只。 小心地拿出机器人,放在桌子上。 机器人下部的碰撞环是柔性部件,拿的 时候要小心,尽量不要接触碰撞环。 拿机器人的姿势如图 (a) 所示。图 (b) 的拿法要避免,否则会使碰撞传感器失 灵。
能力风暴感悟心得体会(3篇)

第1篇在参加能力风暴活动的过程中,我深刻体会到了团队协作、创新思维、沟通能力等综合素质的重要性。
以下是我对能力风暴的感悟心得体会。
一、团队协作的力量能力风暴活动要求参与者分组,共同完成一系列任务。
在这个过程中,我深刻体会到了团队协作的力量。
以下是我对团队协作的几点感悟:1. 明确分工,发挥各自优势。
在团队中,每个人都有自己的特长和优势。
只有明确分工,发挥各自优势,才能使团队发挥出最大的效能。
2. 信任与支持。
在团队中,信任是基石。
只有信任彼此,才能在遇到困难时相互支持,共同克服困难。
3. 沟通与协调。
团队协作离不开沟通与协调。
在活动中,我们要保持良好的沟通,及时了解团队成员的需求和困难,共同解决问题。
4. 激发团队潜能。
在团队中,我们要相互激励,挖掘团队潜能,共同为实现目标而努力。
二、创新思维的重要性能力风暴活动要求参与者具备创新思维,以解决实际问题。
以下是我对创新思维的几点感悟:1. 打破思维定势。
在活动中,我们要敢于打破传统思维定势,勇于尝试新的方法和思路。
2. 发散思维。
在解决问题时,我们要从多个角度思考,寻找多种解决方案。
3. 求异思维。
在创新过程中,我们要敢于挑战权威,提出与众不同的观点。
4. 实践检验。
创新思维需要通过实践来检验,我们要勇于将想法付诸实践,不断改进和完善。
三、沟通能力的重要性在能力风暴活动中,沟通能力至关重要。
以下是我对沟通能力的几点感悟:1. 主动沟通。
在团队中,我们要主动与他人沟通,了解彼此的需求和想法。
2. 倾听与理解。
在沟通中,我们要学会倾听,理解他人的观点,避免误解和冲突。
3. 明确表达。
在表达观点时,我们要清晰、简洁地表达,使他人能够准确理解。
4. 跨文化沟通。
在全球化背景下,我们要具备跨文化沟通能力,与来自不同文化背景的人有效沟通。
四、领导力的培养在能力风暴活动中,领导力也是一项重要的素质。
以下是我对领导力的几点感悟:1. 明确目标。
作为领导者,我们要明确团队目标,带领团队为实现目标而努力。
《机器人实验》实验一 机器人认识实验

院系:计算机学院实验课程:机器人实验实验项目:机器人认识实验指导老师:XXX开课时间:XXXX~ XXXX年度第 1学期专业:XXXX班级:XXXX级本X班学生:XXX学号:XXXXXXXX实验一:机器人认识实验一、实验题目1. 认识能力风暴机器人的基本结构。
2. 学会能力风暴机器人的连接、检测和程序下载等操作。
二、实验要求1. 可以明确能力风暴机器人的各个组成部分。
2. 指出主要组成部分的结构和功能。
3. 学会程序的调试和下载。
三、实验内容和步骤1. 记录自检程序运行的结果,回答每一步用到的传感器和执行器。
(1)第一步:①结果:机器人上的LCD显示屏不断显示不同的符号,显示时字迹符号清晰,没有缺列现象。
②执行器:启动电机、显示。
(2)第二步:①结果:风暴机器人发出音乐,而且声音清晰洪亮,无明显噪声。
②执行器:启动电机、扬声器。
(3)第三步:①结果:此时LCD上应显示“Photo L125 Photo R145”,当用手挡住右边光敏传感器时,在LCD上显示的右边光敏传感器的值会增大,越暗值越大。
左右两边的数值随着光强变化而变化,范围在0—1023之间,光强越弱,数值越大,光强越强,数值越小。
②传感器:光敏传感器。
③执行器:启动电机、显示。
(4)第四步:①结果:此时LCD上应显示“test 4 ir_test IR Test”的字样。
当用纸张挡在能力风暴机器人前面10-80cm的范围内,在LCD上会有“<<<<”、“>>>>”或者“<<<==>>>>”的符号显示,并且指明障碍物所在的方位(左前、右前或者正前);当没有障碍物的时候,显示“----------”。
②传感器:红外传感器。
③执行器:启动电机、显示。
(5)第五步:①结果:LCD上会显示“microphone”的字样,当对着LCD显示屏左上方的麦克风圆孔说话时,发现LCD上的“>”发生了变化。
智能机器人实验报告
机器人实验报告一、实验目的:1、认识“能力风暴"机器人,并会简单编辑程序,使其完成规定动作。
2、了解“能力风暴机器人内部构造,认识声音、光敏、碰撞等传感器。
3、了解AS多功能拓展卡,并能够简单应用。
二、实验过程:各组领取能力风暴机器人,老师对其进行讲解,然后各组对其观察,认识,并编辑一些小程序对其进行简单操作。
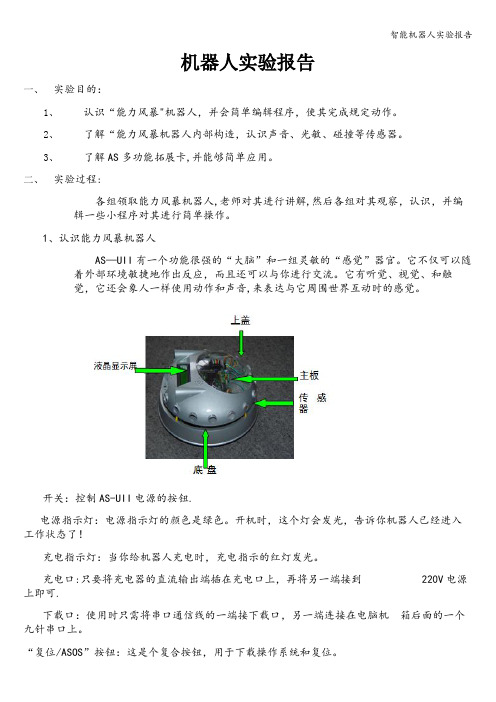
1、认识能力风暴机器人AS—UII有一个功能很强的“大脑”和一组灵敏的“感觉”器官。
它不仅可以随着外部环境敏捷地作出反应,而且还可以与你进行交流。
它有听觉、视觉、和触觉,它还会象人一样使用动作和声音,来表达与它周围世界互动时的感觉。
开关:控制AS-UII电源的按钮.电源指示灯:电源指示灯的颜色是绿色。
开机时,这个灯会发光,告诉你机器人已经进入工作状态了!充电指示灯:当你给机器人充电时,充电指示的红灯发光。
充电口:只要将充电器的直流输出端插在充电口上,再将另一端接到 220V电源上即可.下载口:使用时只需将串口通信线的一端接下载口,另一端连接在电脑机箱后面的一个九针串口上。
“复位/ASOS”按钮:这是个复合按钮,用于下载操作系统和复位。
复位功能:在机器人运行程序的过程中,按下此按钮,机器人就会中断程序的运行。
如果要重新运行程序,须按运行键。
下载操作系统功能:连接好串口通信线,打开机器人电源开关,在VJC1。
5流程图编辑界面中选择“工具(T)——更新操作系统”命令,然后按下此按钮,即可下载操作系统。
运行键:机器人开机后,按击“运行"键,就可以运行最近下载的程序。
通信指示灯:通信指示灯位于机器人主板的前方,是一个黄色的小灯.在给机器人下载程序时,这个黄灯闪烁,表明下载正常,程序正在进入机器人的“大脑”。
2、认识VJC1。
5编程软件例:要求:先让机器人以速度100前进3秒,再让机器人以速度-60后退5秒,再在原地以功率80旋转1秒。
(1)编写流程图a)用鼠标将“执行器模块库”中的“直行”模块移到流程图生成区,并与“主程序"模块连接上;b)右击“直行”模块,在弹出的对话框中输入速度为100、时间为3秒;c)再用鼠标将“执行器模块库”中的“直行"模块移到流程图生成区并连接在第一个“直行”模块的下面;d) 设置第二个“直行" 模块, 在对话框中输入移动速度为-60、时间为5秒;e) 再将“执行器模块库”中的“转向"模块连接到程序中,在模块上点击右键,在弹出的对话框中设置速度和时间分别为:80和1f) 再将“程序模块库"中的“任务结束"模块移入到流程图生成区,并连接在程序的末尾。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2小时认识能力风暴个人机器人文档目录1 能力风暴个人机器人的行为准则 (1)2 能力风暴个人机器人的能量 (2)3 能力风暴个人机器人的大脑 (4)4 能力风暴个人机器人的骨架 (7)5 能力风暴个人机器人的关节 (8)6 能力风暴个人机器人的“脚” (10)7 能力风暴个人机器人的皮肤 (13)8 能力风暴个人机器人的眼睛 (15)9 能力风暴个人机器人的耳朵 (18)10 能力风暴个人机器人的嘴 (20)仅供学习与交流,如有侵权请联系网站删除谢谢01 能力风暴个人机器人的行为准则形成一个社会是不是一个人类能够立足于地球上的决定性因素呢?这个我们不敢肯定,但是社会确实是人类发展不可缺少的环境。
在人类社会的发展进程中,逐渐形成了人类的道德标准,行为规范乃至法律法规。
人类社会中的人们根据这些标准、规范、法律来指导、约束自己的行为,从而使整个人类能正常延续下去。
社会环境的作用巨大,地位也不容忽视。
机器人也是有行为的个体,它们有自己的社会环境吗?这个环境又是怎样的?能力风暴个人机器人是能够自主运行的机器人,它有自己的运行环境,也有规范自己行动的准则。
在大家使用能力风暴个人机器人前,应该首先安装JC软件,JC是指交互式C语言。
大家注意这就是能力风暴个人机器人的“内环境”了!通过这个内环境,机器人可以与外界环境进行交流!能力风暴个人机器人的交流过程是这样进行的,举个例子,比如机器人身在一个迷宫里,它想走出来,我们就要具体的规范它的行为:发现前方有物体,就后退,转弯;左边有碰撞,就向右转,等等,告诉机器人仅供学习与交流,如有侵权请联系网站删除谢谢1一些方法,一些准则,让它知道自己遇到问题该怎么做。
我们告诉机器人的这些行为准则汇总起来就是JC 程序,一种机器人可以读懂的程序。
在完成任务时可以通过下面一些过程,比如通过分析、比较、判断,做出抉择,来自主的完成它的任务。
2 能力风暴个人机器人的能量我们大家每天都要吃东西,因为我们需要从食物中吸收能量来供给我们的身体消耗!人类可以吃的食物有成千上万种,我们通过消化吸收从中吸取需要的营养,来供给我们的消耗。
机器人它也要运动,那它的能量又是从何而来的呢?能力风暴个人机器人能吃的“食物”种类可不象人类能吃的食物种类那么多!我们的能力风暴个人机器人很“挑食”,它只能吃“电能”在能力风暴个人机器人的肚子下面有一个电池盒,盒子里面有5节可充电电池。
仅供学习与交流,如有侵权请联系网站删除谢谢2“哇!快到中午了,我饿了!”我们人类知道自己的感受,心里明白自己饿不饿。
那么机器人自己会知道“饿不饿”吗?聪明的能力风暴个人机器人也自己知道“饿不饿”,当机器人饿了—电池电量不足时,它主板上的红色LED会一闪一闪的,提醒你该给它喂食了—充电!如果你不理它,不给它吃饭,它就不会按照你给它的命令干事,最后干脆一动不动。
你可要照顾好它哟!电量不足红灯闪人吃饭要用到筷子、勺、刀叉等餐具,那机器人吃饭用什么餐具呢?能力风暴个人机器人吃饭也有自己的餐具,这就是充电器。
给机器人充电时,先将它的三态开关拨到“停”的位置,然后将充电器的一端插入机器人的充电口里。
仅供学习与交流,如有侵权请联系网站删除谢谢3仅供学习与交流,如有侵权请联系网站删除 谢谢4充电插口 充电器 充电器的另一端是插座,插入到交流220V 两孔插座上。
此时,充电器上对应着“充电”的红灯亮。
一次充电需要4个小时,当电充满了以后,“充饱”的绿灯亮起。
3 能力风暴个人机器人的大脑大脑是人体最复杂的结构组织。
人的大脑是人行为控制的重要部分,在控制肌体行为时它要做出处理信息、发出指令等一系列的过程。
大脑的实际工作情况我们至今仍不完全清楚,但它是一个“人”不可或缺的东西。
机器人能够自主运行,当然也有它的大脑,作为指挥它行动的中枢。
你知道机器人的大脑是什么吗?能力风暴个人机器人的大脑是它最核心的东西,这就是主板!主板上布满了芯片、走线、管脚、插针,它们共同组成了能力风暴个人机器人的大脑。
能力风暴个人机器人主板图大脑有什么功能?记忆,分析,判断,决断,这些是大脑的基本功能,这些功能能正常进行,大脑的控制能力才能发挥出来。
那么,机器人的大脑有什么功能呢?能力风暴个人机器人的大脑也有记忆功能,这由主板上的内存来实现,至于“分析、判断、决断”功能由主板上的许多芯片共同完成,其中芯片68HC11的作用很大。
能力风暴个人机器人的大脑在明白了“行为准则”后,也就是JC程序下载到主板后,就可以自动运仅供学习与交流,如有侵权请联系网站删除谢谢5行了。
人的大脑有时候会生病的,这种病态可以通过“头晕”,“头痛”这些感觉来表现出来。
机器人的大脑也会出现问题吗?它可以自我诊断吗?能力风暴个人机器人的大脑是会生病的,但是它可以进行简单的故障诊断:a 当主板开关拨到运行时,主板上的绿色LED会亮,若此灯不亮,则表示主板上未得到电;绿灯b 当我们给能力风暴下载程序时,主板上的黄色LED会闪动,表示下载正常,若黄灯不亮或是不闪动,则表示下载不正常。
下载时候黄灯闪仅供学习与交流,如有侵权请联系网站删除谢谢6仅供学习与交流,如有侵权请联系网站删除 谢谢7人体内的五脏六腑,再加上各种器官,这么多东西,它们是靠什么组成人体这样一个整体的?人的五脏六腑,各种器官主要是依附在骨架上的,靠骨架来支撑。
骨架不仅负重,让各种器官依附在自己身上,同时它的构造还是各种器官大体布局的一个框架。
机器人也有很多的“器官”,我们后面会讲到,那么它的器官又是如何布局的呢?它也应该有骨架吧?能力风暴个人机器人的确是有骨架,它的骨架也有支撑和布局两种作用,你能找到吗?“骨架”就是机器人的底架、上盖。
底盘 上盖 能力风暴个人机器人的底架上依附着大脑、关节、脚、嘴、耳朵,外壳上还有眼睛,它们构成了机器人的大体框架。
人的关节是人的运动结构的关键部分,它传递着运动,有时通过它可以改变运动的方向与模式。
关节是人体动作过程中不可或缺的结构组织。
人的身体可以做出很多的动作与姿态,各个关节起到了重要作用。
在机器人身上也有“关节”,你能找出来什么是机器人的“关节”吗?你可以在机器人身上与运动连接最紧密的地方找到机器人的“关节”!这个“关节”就是齿轮头。
齿轮头是能力风暴个人机器人运动的关键所在,它由直流电机和齿轮箱组成:①直流电机利用电能产生旋转运动,传入齿轮箱的是一根旋转的轴,我们称它为电机的输出轴或是齿轮箱的输入轴;②齿轮箱将直流电机输出轴的转速降低,并将这个旋转运动通过轴、齿轮机构传递到轮子上,促使轮子旋转。
这样,能力风暴个人机器人就能够运动起来了。
齿轮头的两个端头一端是输出轴,它与轮子进行连接,将运动传给轮子;一端是输入端子,它是直流电机的电源输入端,它把旋转运动的原动力—电能引入给齿仅供学习与交流,如有侵权请联系网站删除谢谢8轮头这个“关节”。
直流电机电源端子齿轮头输出轴关节在人体内是一个摩擦很多的地方,所以在关节里有关节液进行润滑,能力风暴个人机器人的关节也有这个需要吗?是的,能力风暴个人机器人有这个需要!在能力风暴个人机器人的齿轮头里就充满了润滑油,这样可以促使运动更顺畅可靠!人可以走快走慢,随心所欲!机器人可以这样吗?当然可以!走快走慢与个人机器人的“关节”—齿轮头的输入端密切相关。
因为直流电机的转速受到输入电压的影响,所以当改变输入到直流电机上的平均电压时就可以改变直流电机的转速,转速改变自然就能改变机器人的9运动速度。
6 能力风暴个人机器人的“脚”脚是用来做什么的?走路!那是当然!那么个人机器人的“脚”应该是什么样子的呢?也有两条腿吗?脚的主要功能是行走,是人的重要运动结构!个人机器人作为一个“人”,它也是可以运动的,不过它的运动结构与我们人类的不相同。
你能在个人机器人上找到它的“脚”吗?在能力风暴个人机器人的身上有两个圆圆的轮子,它们就是个人机器人的“脚”了!看来个人机器人是靠轮子的滚动来行走的!我们人用脚能实现什么运动?向前直走,向后转弯,左转,右转,原地打转……,还有,跳跃!这些技术动作个人机器人都10能作吗?能力风暴个人机器人很能干,因为它能够完成向前直走,向后转弯,左转,右转,原地打转这些平地上的技术动作。
但是很遗憾,就现在的机构来讲能力风暴个人机器人还不能跳跃!有这么多种运动方式,能力风暴个人机器人在具体运动时将如何选择呢?我们前面说过,将规范约束机器人的一组指令组合起来,形成一个JC程序,下载到机器人上,机器人就可以根据JC程序来控制自己的行动了。
所以,在我们给机器人的JC程序中可以通过语句的组合、参数的设置让机器人走出不同的技术动作。
在大家学会了让机器人听懂你的话时,你就可以随意的让机器人做出不同的运动方式。
当我们要求机器人走的有节奏又有规律时,你看机器人,是不是在跳舞!大家可以下载\JC\例程文件夹下的程序dance.c,它能让机器人跳舞!有时我们的脚还有其他的功用,比如说它可以用来丈量长度!假如我们一步的距离大致是1cm,那么我们跨了几步就是几个1cm,这样就可以进行简单的丈量了。
个人机器人可以做到吗?11能力风暴个人机器人可以进行丈量,不仅如此,它还可以做的更好,能更精确的进行测量!在能力风暴个人机器人的“脚”内侧—轮子的内侧有一块黑白辐条相间的码盘,旁边的底架上有一块绿色的小芯片,这是光电编码器。
轮子转过多少圈,光电编码器可以统计出来,并把信息反馈给大脑。
当轮子的半径一定时,机器人就可以计算出自己走了多远,进行精确丈量。
反过来行吗?人可以完成这样一个过程:走100m停下。
在具体实现过程中我们可以事先标识出来,然后从起始点走到终点,就算完成了。
个人机器人也可以做到吗?这个对机器人来说很简单。
能力风暴个人机器人可以准确的知道自己走了多远,通过光电编码器返回的信息,大脑可以不断的计算出机器人自己走了多远,进行动态监控。
当然,当它算到自己已经走到规定距离时,就立即下指令让关节、脚停下来。
这样就可以实现“走100m停下”。
关于光电编码器的具体原理、应用我们可以参看《操作手册》。
127 能力风暴个人机器人的皮肤皮肤是人类自我保护的第一道屏障,人是有自我保护能力和意识的,自我保护也是人的天性!能力风暴个人机器人作为智能机器人,智能的表现首先就是它应该会自我保护!人的皮肤不愧是自我保护的第一屏障,它几乎覆盖着人的整个身体,敏感的向大脑反馈着接受到的各种信息!能力风暴个人机器人的皮肤是什么样的,它能完成保护自己的人物吗?能力风暴个人机器人当然也有自己的皮肤,这就是在它腰上的圆环—碰撞环碰撞环能力风暴个人机器人的这张“皮肤”能够感知来自360°的碰撞情况。
当有碰撞产生时,碰撞环受到压迫,然后就顺着碰撞产生的方向按击碰撞环内的微型开关,最后产生一个电信号,通知大脑。