工业机器人在冲压自动化生产线中的应用
华数机器人应用 杨海滨
冲压行业
(一)某洗衣机大型企业冲压生产线
冲压自动化线主要供货范围为5台华数H系列冲压机器人、1台上料 机、1台翻转机、1条皮带线及相关机械加工件,相关设备集成的技术整合。
冲压行业
(二)某洗碗机大型企业冲压生产线
项目效果布局示意图及设备组成(占地13M*7.5M)
2台下料皮带线 3台200T双点压机 铝合金安全防护 (1)整线采用6台华数HSR410 型专用冲压机械手,并 配套多用途端拾器6套
项目效果布局示意图及设备组成(占地7M*3M)工序
10台机械手带夹具
自动上料机
下料槽 (1)整线采用2台华数HSR-410型专用冲压机械 手,并配套多用途夹具2套。
控制系统柜
底座
(2)上料机1台(适用于多种工件的使用)
冲压行业
(五)某工贸有限公司冲压生产线
棒料自动上料机
本系统采用定制料仓,如下图所示。占地约 2000mm*500mm,台面高度约800mm,上料高度约 1100mm。储料约200件,可供系统正常运行25min,考虑 系统正常工作所需的工件保有量和工人上料时间,上料间隔
三、华数机器人产品
华数机器人产品系列之一:六轴机器人系列
50kg
210kg
20kg 12kg 5kg
臂长:2670 精度:±0.15
臂长:746 /850 精度:±0.02
臂长:1585 精度:±0.06
臂长:1722 精度:±0.08
臂长:2146 精度:±0.15
手机打磨、视觉 引导搬运、装配
(十二)某汽车企业焊接生产线
工件
焊点:2 焊点:2 总焊点:4 焊点:22 焊点:6 焊点:24
OP20(点焊)
总焊点:8 焊点:6
机器人在工业中的应用
机器人在工业中的应用机器人的出现给工业生产带来了巨大的变革,它们在提高生产效率、降低成本、减少人力劳动和改善工作环境等方面发挥着重要作用。
本文将探讨机器人在工业中的应用,并讨论其对生产和社会发展的影响。
一、机器人在生产线上的应用机器人在工业生产线上广泛应用,能够完成重复、繁琐和高风险的工作任务。
例如,机器人能够精确地组装零部件,大大提高了生产效率,减少了错误率。
机器人还可以在危险环境中工作,如高温、高压、高辐射等,为人类避免了潜在的伤害风险。
机器人的应用使得生产线更加智能化和自动化,从而提高了产品的质量和可靠性。
二、机器人在物流领域的应用机器人在物流领域也有着广泛的应用,如无人驾驶物流车、智能仓储系统等。
无人驾驶物流车可以自动化地运输货物,减少人工操作和运输时间,提高物流效率。
智能仓储系统利用机器人进行货物的装卸、储存和分类,实现了自动化管理,提高了仓储效率和准确性。
机器人的应用不仅提高了物流行业的效益,还减少了人力成本和物流过程中的错误率。
三、机器人在质检和监测中的应用机器人在质检和监测领域的应用也日益增多。
机器人能够精确地检测产品的质量,例如通过视觉系统来检测产品的表面缺陷,通过传感器检测产品的尺寸和形状等。
机器人的应用还能够实时监测设备的运行状态和效率,提前预防故障和保障生产的连续性。
这些应用既提高了生产线上的质量控制,又降低了质检和监测的成本和时间。
四、机器人对就业和社会发展的影响机器人的应用在一定程度上替代了部分人力劳动,给人们的就业带来了一定的冲击。
然而,机器人的出现也创造了新的就业机会,如机器人研发、维护和操作等。
此外,机器人的应用提高了生产效率和降低了成本,为企业带来了更多的竞争力,促进了经济的发展。
同时,人们将从机器人身上解放出来,可以从事更加创造性和有意义的工作。
因此,机器人的应用对于社会发展来说是积极的。
综上所述,机器人在工业中的应用极大地改变了生产方式和工作环境,提高了生产效率、降低了成本并改善了产品质量。
工业机器人在冲压自动化生产线的应用
M “ M M “ M M M M M M “ “ “ “ M H “ M — 牛
j
【 要】 分析了目 机 摘 首先 前 械手自 动化生产线和 人自 机器 动化生产线区 及优劣。 后以 人自f 别 然 机器
j动化冲压线为例, 了 分析 其机械部分的结构及特点, 并对其进行 了总体布局设计和电器监控设计。结果表
CH EN ~ i Li x n
( p rme t f c a ia n ie rn , AhChn lcr o e ie s y B o ig0 0 C ia De at n h nc lE gn eig No iaE e ti P w rUnv ri , a dn 7 3, h n ) o Me c t 1 0
jds n ce e ufra ip e Cl e t i l-otl dt u m i o—n otle l eg hm to r i ts a r a eh s g cn oa eat ac nle no F i s p w d n h p l e n e s r h o t i c r — n
陈 立 新
( 华北 电力大学 机械 工程 系 , 保定 0 10 ) 70 3
Ap l a i n o n u ti l o o n t e a t ma i t mpn r d c i n l e pi t fI d s r b ti h u o t s a c o ar c ig p o u t i o n
ABB工业机器人在自动化生产线上的应用
ABB工业机器人在自动化生产线上的应用杨淑玲�オ�在现代自动化生产过程中,需要大量的搬运工作。
搬运作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。
在早期生产中是由人力搬运,劳动强度大,效率低,随着工厂自动化程度的不断提高和生产节奏的加快,搬运工业机器人使用的越来越多,与传统的搬运技术相比,工业机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动。
世界上使用的搬运机器人逾10万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。
部分发达国家已制定出人工搬运的最大限度,超过限度的必须由搬运机器人来完成。
一、引言搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学、机械学、电器液压气压技术、自动控制技术、传感器技术、单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分。
它的优点是可以通过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势,尤其体现出了人工智能和适应性。
本文采用ABB出品的IRB 120型工业机器人,讲述工业机器人在自动化生产线上,进行搬运作业的应用编程。
RB 120是ABB新型第四代机器人家族的最新成员,也是迄今为止ABB制造的最小机器人。
IRB 120具有敏捷、紧凑、轻量的特点,控制精度与路径精度俱优,是物料搬运与装配应用的理想选择。
(1)紧凑轻量。
作为ABB目前最小的机器人,IRB 120在紧凑空间内凝聚了ABB产品系列的全部功能与技术。
其重量减至仅25kg,结构设计紧凑,几乎可安装在任何地方,比如工作站内部,机械设备上方,或生产线上其他机器人的近旁。
(2)用途广泛。
IRB120广泛适用于电子、食品饮料、机械、太阳能、制药、医疗、研究等领域,进一步增强了ABB新型第四代机器人家族的实力。
这款6轴机器人最高荷重3kg(手腕(五轴)垂直向下时为4kg),工作范围达580mm,能通过柔性(非刚性)自动化解决方案执行一系列作业。
机器人技术及其应用第10章 工业机器人系统集成与典型应用PPT课件

1.作业顺序和工艺要求
对作业对象(工件) 及其技术要求进行认真细致的分析, 是整个设计的关键环节, 它直接影响工作站的总体布局、机器人型号的选择、末端执行器和变位机等的结构以及 其周边机器型号的选择等方面。在设计工作中,这一内容所投入的精力和时间占总设计 时间的15%~50%。工件越复杂,作业难度越大,投入精力的比例就越大;分析得 越透彻,工作站的设计依据就越充分,将来工作站的性能就可能越好,调试时间和修改 变动量就可能越少。一般来说,工件的分析包含以下几个方面。
图10⁃ 1 机器人工作站
工业机器人工作站的构成及设计原则
机器人工作站的一般设计原则
工作站的设计是一项较为灵活多变、关联因素甚多的技术工作, 若将共同因素抽象 出来, 可得出一般的设计原则。
•设计前必须充分分析作业对象, 拟订最合理的作业工艺。 •必须满足作业的功能要求和环境条件。 •必须满足生产节拍要求。 •整体及各组成部分必须全部满足安全规范及标准。 •各设备及控制系统应具有故障显示及报警装置。
第十章
工业机器人系统集成 与典型应用
整体 概述
一 请在这里输入您的主要叙述内容
二
请在这里输入您的主要 叙述内容
工业机器人在智能制造生产线设计中的应用

工业机器人在智能制造生产线设计中的应用摘要:为了进一步推动智能制造行业的可持续发展,要充分发挥多元智能技术优势,利用工业机器人开展相关工作,提升工业机器人在智能制造方面的研发水平和应用效能,共同促进自动化工业制造的智能发展。
现阶段,为了全面提高生产效率、保障产品质量、降低生产成本、缩减生产周期,本研究对基于工业机器人的智能生产线进行设计。
阐述智能制造生产线的总体设计,多个模块的设计,能够使产品加工效率得到提高。
探讨智能制造生产线的监管系统,将工业机器人应用到智能制造生产线中,能够提高企业经济效益和核心竞争力。
关键词:工业机器人;智能制造;生产线设计;应用引言在全球一体化影响的背景下,各行业市场竞争也越来越激烈,工业生产线的生产效率对企业竞争力造成了影响。
人们生活水平不断提高,增加了对商品的需求量,传统手工生产制造的方式已经无法使人类的需求得到满足。
所以,工业智能机器人在生产线中使用。
实现制造生产线和智能机器人的融合能够提高企业生产效率和核心竞争力。
1智能制造时代工业机器人概述1.1智能制造时代当前,制造业正在从机械制造时代向着独立智能制造时代跃进,一些实力雄厚的企业都在集中力量引进自动化工业机器人,改革企业的生产结构、流程及体系,使企业跟上现代化发展的步伐。
智能制造时代的核心判断标准在于智能制造的技术支撑,智能制造具有独立性、系统性、开放性的特点,其可以通过集成控制系统发出指挥命令,按照预先编制好的程序开展生产制造工作,还可以实现生产过程中的数据收集、生产分析,为管理人员提供生产效率数据方面的参考。
智能时代的制造业具备开放性的特征,智能制造能够完成独立学习,利用开发新技术来不断达成新要求。
1.2工业机器人工业机器人是指应用于工业生产中的机器人设备,其可以完全或者部分替代人的工作完成工业制造及生产任务。
全自动、智能化工业机器人的应用意味着会降低人力资源成本,提高生产率。
工业机器人的生产制造应用了机电一体化技术、仿真学技术、编程数控技术等关键技术,这些技术的应用可以使工业机器人具备丰富的任务处理功能,从而达到代替人工操作的目的。
有关工业机器人的论文题目有哪些

有关工业机器人的论文题目有哪些工业机器人是指在工业领域内所应用的机械手或机器人,其具有多关节和多自由度。
在开始写论文之前,大家对关于工业机器人的论文题目有所困恼,下面小编整理了一些《有关工业机器人的论文题目有哪些》,希望对大家有所帮助。
有关工业机器人的论文题目有哪些篇1:1、基于AGV和工业机器人的智能搬运小车的研究2、任务导向教学法在工业机器人编程教学中的应用3、工业机器人嵌入机电一体化专业人才培养方案的研究4、CDIO视域下工业机器人应用人才培训体系的构建与实施5、工业机器人技术发展应用的探讨6、1+X证书制度下高职院校工业机器人教学改革及实践探索7、“1+X”证书制度下的工业机器人课程建设策略探究8、工业机器人技术的应用及发展探讨9、工业机器人在计量检测工作中的应用前景10、工业机器人在现代制造行业中的应用11、工业机器人电气控制系统设计分析12、现代学徒制下的工业机器人技术课程改革与实践13、技工院校工业机器人应用与维护专业一体化教学模式的构建研究14、工业机器人视觉技术应用方法初探15、基于SolidWorks软件对工业机器人机械臂的结构优化设计和受力、模态分析16、基于工业机器人的智能制造生产线设计方法17、工业机器人在智能制造中的应用研究18、产教融合视角下工业机器人专业新型学徒制的课程体系研究19、论述突防电路在工业机器人电路中的应用20、1+X证书制度下高职院校工业机器人教学改革及实践分析21、PLC控制工业机器人对数控车床上下料研究22、工业机器人课程教学设计23、基于虚拟仿真技术的“工业机器人与生产线”智慧课程教学的创新与改革24、微课背景下高职院校工业机器人技术专业的教学问题及应对策略25、工业机器人在汽车焊装领域中的应用探讨26、工业机器人拥抱新机遇27、工业机器人在汽车生产行业的应用分析28、现场总线的工业机器人智能控制探讨29、基于光栅式测微仪的工业机器人标定系统设计30、校企合作下中职教育工业机器人人才培养模式探讨31、基于工业机器人上下料的多工位机加工生产线设计32、工业机器人跨企业培训中心试点班建设探析33、中职《工业机器人》专业四位一体的教学改革与实践34、互联网+视域下工业机器人教学优化路径探析35、新工科背景下工业机器人课程思政教学模式探索与实践36、机械制造领域的工业机器人发展37、基于机器视觉运用于工业机器人抓取技术的研究38、工业机器人技术在自动化控制领域中的应用微探39、用项目引领工业机器人实操与应用教学40、工业机器人动力学仿真及有限元分析41、基于“金课”背景下的《工业机器人离线编程与仿真》课程改革42、工业机器人在智能制造中的应用浅析43、一种基于工业机器人的铣床自动上下料控制系统44、电子信息技术的嵌入在工业机器人研发中的应用45、人工智能背景下工业机器人技术专业人才培养对策探析46、混合教学模式下“工业机器人操作与运维”课堂教学改革研究47、基于现代信息技术的工业机器人实践课程教学探索48、基于CBL教学法的工业机器人综合设计教学质量评价研究49、工业机器人的应用对我国制造业劳动力市场的影响50、工业机器人工作站系统集成研究与实践有关工业机器人的论文题目有哪些篇2:1、基于工业机器人上下料的多工位机加工生产线设计研究2、高职教育中的工业机器人课程教学改革研究3、基于现代学徒制的高职工业机器人技术专业课程体系研究与实践4、试论工业机器人技术的发展与应用研究5、工业机器人应用促进了产业结构升级吗?6、基于机器视觉的工业机器人分拣技术研究7、中职《工业机器人应用与维护》专业核心课程的开发与研究8、工业机器人涂胶教学系统的研究分析9、基于视觉的工业机器人应用系统发展及研究综述10、基于工业机器人的智能制造生产线设计方法11、“1+X”工业机器人操作与运维典型工作任务红蓝码垛实践与探索12、探析机械设备制造中自动化技术及工业机器人的应用13、工业机器人在自动化控制中的应用分析14、工业机器人技术在自动化控制领域的实践探讨15、“工业机器人编程与操作”课程混合式教学改革探索16、“工业机器人拆装与调试”课程线上教学研究17、基于“1+X”工业机器人专业课证融通探索研究18、工业机器人技术在电气控制中的应用研究19、工业机器人与人工智能技术的整合分析20、工业机器人去毛刺平台研发路径探究21、工业机器人在智能制造中的应用22、基于“1+X”证书的《KUKA工业机器人机械维护》课程设计与实施23、工业机器人驱动器可靠性设计优化24、基于CBL和CBS双轨教学法在工业机器人编程和操作中应用研究25、工业机器人专业双元制教学策略探讨26、基于机器视觉的工业机器人分拣技术探索27、行动导向下高校工业机器人课程教学研究28、基于深度学习的工业机器人摩擦力补偿方法研究29、关于提升工业机器人运行效率的三点问题探究30、浅谈中职学校工业机器人的仿真教学实践31、“1+X”证书制度下工业机器人应用实训基地建设的探索与实践32、基于RobotStudio仿真软件的ABB工业机器人去毛刺打磨工作站的设计33、离线编程示教的工业机器人教学思考分析34、基于Kane方法的工业机器人系统柔性动力学模型研究35、基于学习通的工业机器人离线编程与仿真课程教学模式研究36、“新”生产率悖论?工业机器人采用对制造业生产率的影响37、基于工业机器人的自动化生产技术应用38、简析工业机器人技术在自动化控制领域的运用39、探究工业机器人自动化在企业生产中的应用40、基于TRIZ理论的河南省工业机器人产业高价值专利培育机制研究41、浅谈“工业机器人”专业在职业教育中的开展42、工业机器人在机械制造领域的发展探索43、工业机器人产业的发展现状分析及产业对策研究44、工业机器人技术专业课程思政教学改革研究与实践45、乡村振兴背景下农村中职学校工业机器人专业“三教”改革模式探析46、工业机器人技术专业“校企合作,工学结合”人才培养模式的探究与实施47、利用五种方法对同一毛坯的工业机器人编程教学研究48、混合式教学下工业机器人课程教学实践研究49、工业机器人应用编程课程思政教学改革实证研究50、工业机器人在铸造自动化生产线中的应用有关工业机器人的论文题目有哪些篇3:1、高速重载工业机器人臂机构研究2、工业机器人在冲压自动化生产线中的应用分析3、“1+X”证书制度下工业机器人技术专业建设思考4、汽车焊装生产线上工业机器人的应用5、工业机器人研发中电子信息技术的嵌入技术探析6、试论职业院校工业机器人专业建设思路和策略7、刍议工业机器人在汽车制造领域的应用8、基于MATLAB的工业机器人运动学分析与仿真9、基于视觉的工业机器人装配生产线的研究10、“岗课赛证”融通的工业机器人专业课程体系构建11、浅谈工业机器人技术在球墨铸铁管生产线中的应用12、基于PLC和工业机器人的立体仓库工件排序方法研究13、工业机器人实训课程的综合实训项目设计14、学考背景下工业机器人专业机械制图课程的教学策略研究15、工业机器人在制造业中的应用研究16、工业机器人自动化生产线布局设计与优化策略17、智能制造背景下工业机器人技术专业人才培养研究18、工业机器人技术在制冷行业中的应用研究19、浅谈工业机器人在白酒行业上甑蒸馏环节中的应用20、基于产教深度融合的“应用引领,岗位实境”工业机器人专业人才培养模式探究21、关于工业机器人技术在智能制造领域中的应用22、《工业机器人技术基础》课程思政教学改革研究与实践23、工业机器人在智能制造生产线设计中的应用24、基于opencv的ABB工业机器人视觉调试实例分析25、“1+X”证书制度下高职工业机器人技术专业建设研究26、“工匠精神”下《工业机器人技术》的课程育人培养模式研究与实践27、工业机器人在自动化控制中的运用探讨28、工业机器人技术的发展与应用综述29、双臂工业机器人结构设计与运动的探究30、工业机器人摩擦补偿方法研究31、结合《工业机器人操作与运维职业技能等级证书》考核的工业机器人教学32、工业机器人在智能制造中的应用浅析33、新工科背景下工业机器人教育教学改革与实践策略34、浅谈机电一体化技术在汽车工业机器人中的应用35、互联网+时代工业机器人课程教学模式探究36、工业机器人在智能制造中的应用37、工业机器人总体设计方法研究38、工业机器人在汽车焊接中的应用39、工业机器人技术专业课程思政的教学探究40、工业机器人技术在电气控制中的应用41、工业机器人在自动化控制领域中的应用研究42、高职“工业机器人系统建模”课程思政建设的教学研究与实践43、基于DeviceNet现场总线技术的ABB工业机器人与PLC通信的实现44、基于STM32的工业机器人恒力打磨装置控制系统设计45、工业机器人安全防护技术综述46、ABB IRB120型工业机器人多物料码垛编程及搬运实例47、基于工业机器人专业“1+X”证书制度下课岗证赛融通体系研究48、汽车制造工业机器人专业人才课程体系的构建研究49、基于工程教育认证的《工业机器人项目综合训练》课程改革与探索50、1+X证书制度下工业机器人技术专业课程体系重构。
冲压自动化生产线的优势和局限性分析
冲压自动化生产线的优势和局限性分析自动化生产线是现代工业生产的重要组成部分,它通过将人力资源与工程技术相结合,实现生产过程的自动化与高度集成。
冲压自动化生产线是其中的重要组成部分,它在冲压行业中发挥着重要的作用。
本文将对冲压自动化生产线的优势和局限性进行分析,旨在全面了解这一生产方式的优缺点,以便更好地应用于实际生产中。
一、冲压自动化生产线的优势1. 提高生产效率和产品质量冲压自动化生产线可以实现高速、高精度的冲压加工,大大提高了生产效率。
相较于传统手工操作,自动化生产无需人工繁琐的重复动作,大大消减了人力资源的浪费。
此外,自动化生产线通过精确的控制系统,确保产品加工的一致性和精度,提高了产品的整体质量。
2. 提高生产安全和员工福利冲压自动化生产线采用全自动化设备和机器人技术,大大减少了人员接触危险环境的机会,提高了生产安全性。
员工只需进行设备的监控和运维工作,减少了劳动强度和职业风险。
同时,自动化生产线的应用还可提高员工的工作环境和福利待遇,提高员工的生产积极性和工作满意度。
3. 实现生产数据的集中管理和分析冲压自动化生产线通过信息化技术和智能设备,实现对生产数据的全面采集和实时监控。
生产数据包括生产速度、产品质量、故障率等关键指标,通过分析这些数据可以及时发现和解决问题,提高生产线的稳定性和可靠度。
4. 降低生产成本和资源浪费冲压自动化生产线可以优化生产流程和节约人力资源,从而降低生产成本。
自动设备和机器人的使用可提高生产的效率和精度,减少了废品率和物料损耗。
此外,自动化生产线可通过监控和调整生产过程,降低对能源和原材料的浪费,为企业节约资源开支。
二、冲压自动化生产线的局限性1. 高昂的投入成本冲压自动化生产线所需的设备和系统具有较高的投资成本。
自动化设备和机器人技术的引入需要大量的资金投入,同时还需要为其提供相应的维护和管理成本。
因此,对于一些刚开始规模较小的企业来说,冲压自动化生产线的建设可能存在较高的门槛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
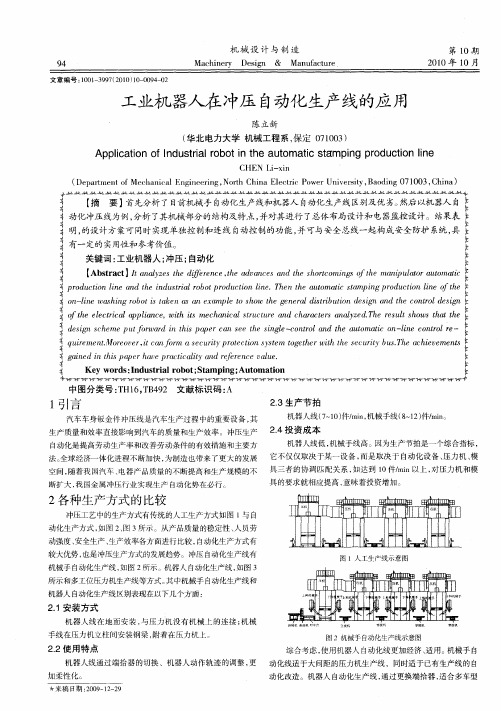
第3期(总第160期)2010年6月机械工程与自动化M ECHA N ICAL EN GI NEER IN G & AU T O M A T IO N N o.3Jun.文章编号:1672-6413(2010)03-0133-03工业机器人在冲压自动化生产线中的应用陈立新,郭文彦(华北电力大学机械工程系,河北 保定 071003)摘要:首先分析了机械手自动化生产线和机器人自动化生产线的区别及优劣。
然后以机器人自动化冲压线为例,分析了其机械部分的结构及特点,并对其进行了总体布局设计和电气监控设计。
结果表明,设计方案可同时实现单独控制和连线自动控制的功能,并可与安全总线一起构成安全防护系统,具有一定的实用性和参考价值。
关键词:工业机器人;冲压;自动化中图分类号:T P242.2∶T G 38 文献标识码:A收稿日期:2009-09-27;修回日期:2010-01-21作者简介:陈立新(1963-),女,河北保定人,副教授,博士,主要研究方向为机械设计及制造。
0 引言汽车车身钣金件冲压线是汽车生产过程中的重要设备,其生产质量和效率直接影响到汽车的质量和生产效率。
冲压生产自动化是提高劳动生产率和改善劳动条件的有效措施和主要方法。
随着我国汽车、电器产品质量的不断提高和生产规模的不断扩大,我国金属冲压行业实现生产自动化势在必行。
1 各种生产方式的比较冲压工艺中的生产方式有传统的人工生产方式(如图1所示)与自动化生产方式(如图2与图3所示)。
从产品质量的稳定性、人员劳动强度、安全生产、生产效率各方面进行比较,自动化生产方式有较大优势,也是冲压生产方式的发展趋势。
冲压自动化生产线又分为机械手自动化生产线、机器人自动化生产线和多工位压力机生产线等方式。
图1 人工生产线示意图图2 机械手自动化生产线示意图 机械手自动化生产线和机器人自动化生产线的区别主要表现在以下几个方面:(1)安装方式:机器人线在地面安装,与压力机没有机械上的连接;机械手线在压力机立柱间安装钢梁,附着在压力机上。
(2)使用特点:机器人线通过端拾器的切换和机器人动作轨迹的调整,更加柔性化。
(3)生产节拍:机器人线生产节拍为7件/min~10件/min,机械手线为8件/min~12件/min。
(4)投资成本:机器人线投资低,机械手线投资高。
因为生产节拍是一个综合指标,它不仅取决于某一设备,而且取决于自动化设备、压力机、模具3者的协调匹配关系,如达到10件/min以上,对压力机和模具的要求就相应提高,意味着投资增加。
综合考虑,使用机器人自动化线更加经济、适用。
机械手自动化线适于大间距的压力机生产线,同时适用于已有生产线的自动化改造。
通过更换端拾器,机器人自动化生产线可适合多车型的生产,柔性更高。
图3 机器人自动化生产线示意图2 机器人冲压自动化生产线设计机器人自动化冲压生产线运行循环方式为:垛料拆垛(机器人拆垛)-板料传输-板料涂油-板料对中-上料机器人送料-(首台压机冲压)-下料机器人取料、送料-(压机冲压)-(根据工序数量循环)-下料机器人取料、送料-(末端压机冲压)-线尾机器人取料、放料-皮带机输送-人工码垛。
本文以长城汽车的机器人冲压自动化生产线为例对其整体布局、电器控制等进行具体设计。
2.1 系统组成本系统包括拆垛系统、涂油机、对中台、压力机兼上下料系统、线尾输送系统。
拆垛系统采用可循环式双垛料台,导轨布置平行于压力机,冲压板料用行车或叉车放置在非工作垛料台上,然后通过有效信号确认上料完毕,系统将在一台拆垛完成后自动转换垛料台,保证连续生产;在垛料车上配备磁力分张器,通过磁力将垛料自动拆垛成单张。
在拆垛机器人上有双料检测以及双料处理装置以保证每次为单张送料。
拆垛机器人将板料放置在长度可调的磁性传送带上,板料送至涂油机,板料是否涂油及涂油位置可通过编程自行设定,板料涂油后,传送到对中台。
对中台采用机械对中台,可方便地进行移动和固定,同时使用重力对中或视觉对中系统,保证板料的重复定位快捷、准确与牢固;上料机器人根据每个零件的对中位置,改变运行轨迹,将板料准确地搬运到压力机内;对不同的冲压制件进行机器人的模拟示教,离线编程,以适应多种制件的共线生产;线尾输送采用皮带机,在生产线的末端放置皮带机,保证最后一台压力机的机器人直接将零件放置到皮带机上,达到出件效果。
通过软件使机器人跟踪压机的运动,实现压机与机器人同步功能,可以最大化上下料与压机运动之间的重合度,达到平稳切换其速度来缩短生产节拍及减少机械负荷的目的。
通过增加外部轴,做为机器人的第七轴进行伺服控制,使压力机间的间距布置更加自由;同时,机器人的传送范围和搬运速度得到提升,生产节拍更快。
2.2 控制系统2.2.1 总体控制方案本系统包括拆垛机、涂油机、对中台、上下料系统、线尾输送系统,各分系统间的电气控制按照集中监控、分散控制的原则。
在各控制部分控制系统中,采用设备层和控制层的典型控制模式,每个层次中使用不同的网络结构及软硬件配置,以实现各自不同的功能。
2.2.2 控制层各部分控制系统采用具有现场总线形式的PLC控制方式,具有单独控制及连线自动控制的功能。
为保证系统稳定可靠地运行,可采用西门子S7-416-2DP的PLC,现场总线采用西门子Profibus总线及工业以太网控制系统。
每个控制部分的PLC之间及各PLC与上位机之间的数据交换采用工业以太网方式,供监控系统联网使用。
压力机控制系统需配备Ethernet card与机器人控制系统接口,控制系统与机器人系统间通过Pro fibus-DP现场总线形式实现信息交换和连锁对接。
2.2.3 设备层设备层在整个控制系统中处于最底层,是整个控制系统的关键环节,主要包括现场操作站、现场设备检测单元(如接近开关、光电开关)、现场其他输入设备、现场执行机构(如电动机、电磁阀)等,直接或通过现场总线与控制层中的PLC相联系,将输入信号发送给PLC,并将PLC输出指令发送到现场设备。
各种传感器和阀的接线盒通过现场总线(Pr ofibus-DP)和相应控制单元通讯。
・134・ 机械工程与自动化 2010年第3期 2.2.4 人机界面HM I本系统HMI采用SIEM ENS的触摸屏,在每个控制单元均配置一个触摸屏,采用Pr ofibus总线通讯。
单元触摸屏具有指示灯及操作按钮(或旋钮),可显示错误报警及自诊断等信息,本单元相关的I/O信号在HM I上显示,并以不同颜色区分。
一旦有故障节点,系统将持续报警,HMI上将在当前画面显示故障点,以便工作人员查找。
2.3 安全系统安全是自动化生产线的最大特点,本系统采用基于德国PILZ安全PLC的SafetyBus保护系统,并配置了完善的安全装置,实时控制显示安全区域状况,及时发出声光报警信号或停机,与主PLC系统通讯采用Pro fibus-DP总线。
声光报警单元作为整线安全系统的辅助工具,能够在设备启停、设备故障、上下料故障以及安全系统中各安全监控点报警等异常状况发生时及时通知操作人员处理。
在拆垛系统前设有一升降门,该门为卷帘门。
升降门的开闭与两个垛料台的转换互锁,当一个垛料台无料时,另一个垛料台进入前,升降门打开,垛料台开进;当前一个垛料台开出后,升降门落下。
升降门是电动升降,并且由操作员从相应的操作台控制,在关闭时它们检测2个行程开关,打开时用一个传感器检测。
在保证工作单元安全的情况下,一个光幕单元(发射器/接收器)允许相关的垛料台车的进出,也就是说冲压线自动运行。
如果相关的垛料台车不是处于过渡阶段,而是人或者异物阻挡光幕,这个光幕单元的断开将导致整个冲压线机器人动力的切断(除了处于编程模式的机器人),并且拆垛单元的控制回路电源断开。
整个控制系统的所有紧急停止信号以及压机和机器人之间的安全连锁信号都连入安全PLC系统,通过PLC程序进行互锁控制。
2.4 仿真模拟在虚拟环境中仿真冲压线的运行情况,避免到生产现场才发现诸如干涉、节拍不合理等错误;通过机器人离线编程,对机器人的运动轨迹和路线进行模拟,以缩短现场的调试周期。
机器人运行轨迹如图4所示。
图4 机器人运动轨迹图3 结语机器人冲压加工自动化的应用,既改善了劳动条件,减轻了工人劳动强度,又可确保生产安全,提高劳动生产率和产品质量,还能降低能源及原材料消耗,节省辅助加工时间,降低产品成本。
随着生产线的制作、调试周期逐步缩短,机器人自动化生产线越来越为汽车主机厂所接受,成为冲压自动化生产线的主流。
参考文献:[1] 陈峰,王震耀.操作机器人的机构研究综述[J].机械设计,2009,26(6):1-2,7.[2] 关学锋,王伟,胡明.基于运动控制卡的五自由度机器人控制系统的开发[J].机械设计与制造,2009(6):189-190.[3] 董鑫,高国琴,吕韫琦.六轴联动数控加工并联机器人的光滑滑模控制研究[J].机床与液压,2009,37(5):111-114.[4] 姜铭,孙钊,秦康生,等.混联机器人的分析与研究[J].制造业自动化,2009,31(1):61-65.[5] 陆光钰,王怀彬,王皓,等.车门板辊压包边机器人环境力约束仿真与试验研究[J].中国机械工程,2009,20(9):1126-1129.Application of Industrial Robot in the AutomaticStamping Production LineCHEN Li-xin,GUO Wen-yan(Depar tm ent of M echanical Engin eering,North China E lectric Power Univer sity,Baoding071003,Chin a)Abstract:T his paper analy zes the difference,t he advances and t he shor tcoming s o f the m anipulator automat ion pro ductio n line and the industr ial r obo t pr oduct ion line.T hen an aut omatic stamping pr oduction line o f indust rial r obot is taken as ex ample to show the layo ut desig n a nd the contr ol desig n o f the aut omatic pr oduction line,based on analy sis of its mechanical str uctur e and char acter s. T he r esult sho ws that the design scheme put for war d in this paper can meet the co nt ro l requir ement.M o reo ver,it can fo rm a secur ity pr o tect ion system tog ether w it h t he security bus.Key words:indust rial r obot;st amping;autom atio n・135・ 2010年第3期 陈立新,等:工业机器人在冲压自动化生产线中的应用。