舵机带宽辨识方法研究
基于位置回环宽度的分析与研究

基于位置回环宽度的分析与研究摘要:以某电动舵机为研究对象,对影响位置回环测试中回环宽度因素进行分析。
经过理论分析和工程验证,得到通过减小舵机的齿轮间隙能够有效减小舵机系统的回环宽度,为电动舵机系统的优化设计、性能预测及调试提供了理论支持,并具有较高的工程应用价值。
关键词:电动舵机位置回环回环宽度数学模型仿真1.引言随着现在军事变革对武器系统的需求,电动舵机越来越广泛应用于导弹、无人机以及潜艇等领域中。
其具有结构简单、使用维护方便、动态响应速度快等优点。
[1]舵机系统有多种动力形式,包括气动、电动、液压等类别,近年来,磁致伸缩、电致伸缩等新技术也开始在舵机系统中得到应用。
[2]目前电动舵机主要在小功率航模舵机和大功率高端军用舵机两个方向发展。
其中,航模舵机的在技术上已经趋于成熟。
电动舵机在装配完成后需对舵机零位、电机电压和电流、速度特性、速度回环、位置回环以及频率特性等内容参数等进行一系列的测试。
[3]其中位置回环的测试是指给电动舵机系统输入正弦信号并采集其反馈输出的位置信号,通过计算和处理就可以得到正负最大偏角、回环宽度、位置增益和线性度。
回环宽度是指电动舵机系统输出的一个正弦信号周期内,信号对称点对应的位置信号的差值,是其判断舵机性能指标的一个重要参考因素。
本文研究建立了一套电动舵机系统数学模型,通过Matlab仿真对电动舵机位置回环的位置回环宽度的影响因素进行研究分析。
结果表明电动舵机系统的齿轮间隙对舵机位置回环的回环宽度有着重要的影响。
1.位置回环宽度电动舵机输入的正弦信号为,输出反馈信号为位置回环宽度为(1)其中,r为电机的转动半径, α为角加速度,τ为舵机转动角度,t为舵机转动时间。
回环宽度与电动舵机的切向角加速度有关。
电动舵机的切向角加速度越大,位置回环的回环宽度值越接近于0,电机控制角度行程能力越高。
综上,在舵机系统中对舵机的运动状态产生影响的如舵机机械结构、电机性能都会对舵机的位置回环宽度产生影响。
电动舵机伺服系统非线性辨识及补偿

电动舵机伺服系统非线性辨识及补偿肖前进;贾宏光;章家保;韩雪峰;席睿【摘要】To improve the tracking accuracy of an electromechanical actuator servo system,the methods to identify and compensate the noninearities of friction and backlash were put forward.The mathematical models based on the LuGre friction and the hysteresis backlash were established for the electromechanical actuator servo system with position loop and speed loop controllers.According to the identified nonlinearity models,the friction was compensated though a feed-forward method,and the backlash was compensated simultaneously though an inverse model as well.The experiments indicate that the maximum position tracking error of system after compensation decreases from 0.166° to 0.096°,and the maximum speed tracking error decreases from 2.723 r/min to 0.393 r/min when the given signal is sine wave with an amplitude of 1° and a frequency of 2.5 Hz.It concluds that the friction and backlash models can be accurately obtained by the proposed identification methods,and the tracking accuracy of the electromechanical actuator servo system can be improved through nonlinearity compensation on the basis of the proposed models.%为提高电动舵机伺服系统的跟踪精度,提出了辨识、测试它的摩擦和间隙非线性及对其进行补偿的方法.针对位置和速度双闭环控制的电动舵机伺服系统,建立了基于LuGre摩擦和迟滞间隙的数学模型;依据模型采用前馈补偿方法对系统中的摩擦进行补偿,同时采用逆模型方法对系统中的间隙进行补偿控制.实验显示,对于幅值为1°,频率为2.5Hz的给定正弦信号,补偿后系统的最大位置跟踪误差由原来的0.166°减小到了0.096°,最大速度跟踪误差由原来的2.723 r/min减小到了0.393 r/min.结果表明,本文提出的辨识测试方法能够精确地获得摩擦和间隙模型,基于该模型的补偿能够有效地提高电动舵机伺服系统的跟踪精度.【期刊名称】《光学精密工程》【年(卷),期】2013(021)008【总页数】10页(P2038-2047)【关键词】电动舵机伺服系统;非线性;LuGre摩擦;迟滞间隙;辨识及补偿【作者】肖前进;贾宏光;章家保;韩雪峰;席睿【作者单位】中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院大学,北京100039;武汉第二船舶设计研究所,湖北武汉430064;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033【正文语种】中文【中图分类】V421.6;TP2731 引言飞控电动舵机系统是高精度的位置跟踪伺服系统,其性能直接决定着飞行器控制的动态品质。
基于自适应遗传算法的舵机传递函数辨识

基于自适应遗传算法的舵机传递函数辨识王莉;贾建芳【期刊名称】《电子测试》【年(卷),期】2012(000)003【摘要】The working characteristics of actuator are briefly introduced, and the transfer function of actuator is identified using adaptive genetic algorithm. Compared with simple genetic algorithm , the optimal preservation and gambling roulette is used as selection operator and sort fitness before selection, and adaptive crossover and mutation operatorsare used. The termination condition is also divided into two categories, fitness is less than the set value and the generation is achieved. Then adaptive results compares with genetic algorithm , simulation results show that adaptive genetic algorithm based system identification has great advantages of computation speed and convergence property.%简要介绍了舵机的工作特性,利用自适应遗传算法对舵机传递函数进行了辨识,与传统遗传算法相比,自适应遗传算法的选择算子采用最优保存和赌轮盘相结合,并在进行赌轮盘前对适应度进行排序,交叉变异算子采用自适应交叉和变异算子,终止条件也分为两类,适应度小于设定的值时就会跳出遗传算法和达到代数上限时跳出遗传算法。
舵机研究报告

舵机研究报告
舵机是一种将电信号转为机械运动的设备,常用于控制机器人的运动或调节物体的位置。
舵机通常由电机、传感器和控制电路构成。
舵机的工作原理是,通过控制电路将电信号转为PWM信号,
然后传给电机驱动电路,电机驱动电路再根据PWM信号的高
低电平控制电机的转动角度。
舵机内部还装有位置传感器,可以感知电机的位置并与控制电路进行反馈,从而实现精确的角度控制。
舵机的特点是具有很高的精度和稳定性,可以实现准确的位置控制。
它们通常有固定的工作角度范围,例如180度或360度。
舵机的工作电压和电流也有一定的范围,需要根据具体的应用场景进行选择。
舵机在机器人领域有广泛的应用,可以用于控制机器人的关节运动,使机器人能够准确地完成各种动作。
舵机也常用于航模、车模和船模等遥控玩具中,可以控制模型的转向、舵机或其他运动。
在舵机的研究中,常常涉及到舵机的控制算法和控制系统设计。
例如,通过PID控制算法可以实现舵机的准确跟随和稳定控制。
此外,还有一些研究关注舵机的结构和材料,以提高其性能和寿命。
总的来说,舵机是一种重要的电机设备,具有广泛的应用领域。
在舵机的研究中,控制算法和系统设计是重要的研究方向,也有一些研究关注舵机的结构和材料。
随着机器人技术和遥控玩具的发展,舵机的应用前景将更加广阔。
基于dSPACE 的电动舵机的模型辨识
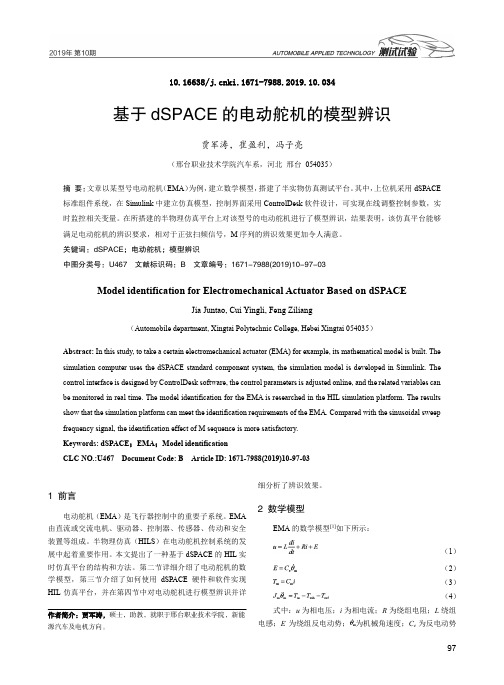
图 2 电动舵机的仿真平台的仿真框图
件
编写了主控计算机的控制界面,如图 3 所示。在该虚拟仪表
控制界面上,包括五个区域,分别是图像显示区、信号发生
10.16638/ki.1671-7988.2019.10.034
基于 dSPACE 的电动舵机的模型辨识
贾军涛,崔盈利,冯子亮
(邢台职业技术学院汽车系,河北 邢台 054035)
摘 要:文章以某型号电动舵机(EMA)为例,建立数学模型,搭建了半实物仿真测试平台。其中,上位机采用 dSPACE 标准组件系统,在 Simulink 中建立仿真模型,控制界面采用 ControlDesk 软件设计,可实现在线调整控制参数,实 时监控相关变量。在所搭建的半物理仿真平台上对该型号的电动舵机进行了模型辨识,结果表明,该仿真平台能够 满足电动舵机的辨识要求,相对于正弦扫频信号,M 序列的辨识效果更加令人满意。 关键词:dSPACE;电动舵机;模型辨识 中图分类号:U467 文献标识码:B 文章编号:1671-7988(2019)10-97-03
系数;Cm 为转矩系数;Tm 为电磁转矩;Tmh 为转换到电机轴 上摩擦力矩;Tmf 为转换到电机轴上的负载铰链力矩;Jm 为电 机转子及负载的转动惯量。
3 测试平台的设计与搭建
3.1 总体设计 基于 dSPACE 的电动舵机系统的半实物仿真平台包括两
大部分:硬件部分和软件部分。半实物仿真平台的整体结构 如图 1 所示,硬件系统用来控制舵机的执行机构并采集舵机 的位置反馈信号,它主要由上位机,dSPACE 仿真机与电动 舵机构成;软件系统用来生成激励信号,确定控制算法,显 示和分析舵机的位置反馈信号,在线调整控制算法。它主要 由主机软件、信号发生器模块、数据采集模块、控制算法模 块和性能分析模块组成。
基于LabVIEW的直流舵机性能测试系统
2)零位测试零位测试是测试电气零位和机械 零位的偏差。
3)满程测试满程测试是测试输入信号在两个 极限值之间连续变化时.对应的齿条输出位移的变 化范围。
4)跟随特性跟随特性反映了舵机齿条输出位 移与输入信号的关系。理想情况下为一直线,但由于 电磁元件的磁滞、传动部分的间隙等因素影响,实际 为一回环曲线。通过曲线分析,确定启动电压、启动 电流、最大位移量、放大倍数、滞环宽度和线性度等, 得到舵机的跟随特性。
收稿日期:2006—05—23:修订日期:2006—08—24 作者简介:习赵军(1974一),男,研究生,研究方向为检测技术和智能仪表;李昌禧(1947一),男,博士生导师,研究方向为检
测技术和智能仪表、测控管一体化技术、机电一体化技术。
圆
万方数据
新手段。
1 舵机测试原理与测试项目 舵机是一个位置反馈伺服系统,主要由伺服放
所有的测试项目.对数据进行实时处理采集,在出现 异常的情况下对舵机性能及时做出评价。
测试系统软件采用模块化结构进行设计。整个 程序包括五个结构模块:极性检查模块、零位测试模 块、调零测试模块、跟随特性测试模块、稳定性测试 模块和频率特性测试模块。各结构模块还包括以下 功能模块:输入信号产生模块、数据采集传输模块、 数据处理分析模块、绘图输出模块。软件使用数据库 技术来保存测试用例和测试结果,对测试结果可进 行离线回放。
文章编号:1001—9944(2006)06-0060—03
基于LabVI EW的直流舵机性能测试系统
习赵军,谢 东,李昌禧
(华中科技大学控制科学与工程系,武汉430074)
摘要:介绍了舵机性能测试系统的硬件组成、软件设计和功能测试实验。系统采用 LabVlEW做为软件开发环境进行程序设计.实现了激励信号的产生、舵机输出信号的采 集、回放、数据处理以及舵机性能分析等功能。测试过程分手动测试和自动测试两种,可根 据不同情况进行相关性能指标的测试。实验结果表明,该系统极大地提高了测试效率和精 度。降低了测试成本。 关键词:数据采集;虚拟仪器技术;舵机;自动测试;测试系统 中图分类号:TP274.5 文献标志码:B
舵回路动态特性的频域辨识
舵回路动态特性的频域辨识裴少俊;顾冬雷【摘要】舵回路是飞行器最重要的执行机构,其动态特性的高精度建模为高质量控制系统设计所必须.采用机理建模的方法,相关物理参数获取困难,模型精度不易得到保证.频域辨识方法通过分析舵系统输入输出数据,可以简便地获取高精度的模型.以某型无人直升机各个通道辨识为例进行研究,取得了良好的结果.【期刊名称】《现代防御技术》【年(卷),期】2014(042)004【总页数】4页(P88-91)【关键词】舵回路;频域辨识;传递函数【作者】裴少俊;顾冬雷【作者单位】南京模拟技术研究所,江苏南京210016;南京模拟技术研究所,江苏南京210016【正文语种】中文【中图分类】V212.40 引言舵回路是飞行器中最重要的执行机构。
飞行控制律的设计必须获取舵回路动态特性的精确模型[1]。
利用机理建模的方法,需要涉及到舵回路的各个环节,过程复杂、工作量大而且不易获得准确的动态特性[2]。
利用阶跃响应进行相关的超调、过渡时间等参量的测量去求取传递函数,方法比较粗略,无法获取精细的信息[3]。
利用时域辨识方法,由于其拟合过程数据加权本质上更加偏重低频部分,对高频特性辨识得不够准确,无法全面反映对象的动态特性[2-4]。
而本文利用频域辨识方法,则可以全面地获取所需要的频段动态特性,提升高频特性精度,为高质量的飞行控制律设计提供必要的信息[4-5]。
频域辨识方法一般分成确定模型结构、数据采集、参数辨识、数据校核等步骤,构成一个完整的整体[2,4,6]。
本文以此方法针对某型无人直升机的舵回路特性进行了相关研究工作,取得了较好的效果。
1 辨识建模1.1 模型结构辨识建模首先需要获取模型结构。
一般地,辨识的模型结构主要抓住系统的关键特性即可[2,4],而无须过多顾及细节。
辨识参数一般均为集总参数,除了反映系统关键特性外,也包含了次要特性的影响因素。
由图1所示为某型号无人直升机舵回路基本原理,控制回路通过比较位置设定值和反馈值之间的关系求取控制信号,驱动电机运动,达到位置伺服控制的效果。
舵机调研报告
舵机调研报告舵机调研报告一、调研目的和背景舵机是一种常见的控制设备,广泛应用于机器人、无人机、航模等领域。
本次调研旨在了解舵机的基本原理、工作方式、应用领域以及市场现状,为相关领域的研发和应用提供参考。
二、调研方法本次调研采用了文献调研和网络调研相结合的方式进行。
通过阅读相关文献和查询互联网资源,收集关于舵机的基本资料、技术参数、市场发展动态等信息。
三、舵机的基本原理和工作方式舵机是一种用于实现精确控制角度的电机装置。
其基本原理是通过电机运转产生的扭矩驱动一根输出轴转动,从而实现对转轴的精确控制。
舵机通常由电机、减速装置、位置反馈装置和控制电路等几个部分组成。
舵机的工作方式可以分为位置控制和速度控制两种。
在位置控制模式下,舵机会根据输入的控制信号来旋转至指定角度位置,并保持该位置不变。
在速度控制模式下,舵机会根据输入的控制信号来旋转至指定速度,并保持该速度不变。
四、舵机的应用领域舵机在机器人、无人机、航模等领域有着广泛的应用。
具体包括以下几个方面:1. 机器人领域:舵机通常用于机器人的关节控制,实现机器人身体各部分的运动。
2. 无人机领域:舵机可以用于控制无人机的舵面,调整飞行姿态和飞行方向。
3. 航模领域:舵机是遥控飞机、船和车辆的重要控制设备,可以实现模型的精确控制。
4. 工控领域:舵机在自动化生产线和智能装备中也得到了广泛应用,用于控制机械臂、传送带等运动设备。
五、舵机市场现状和发展趋势舵机市场在近年来呈现稳步增长的趋势。
舵机的广泛应用需要不断增加的市场需求,特别是在机器人和无人机领域的快速发展的推动下。
同时,舵机技术也在不断发展和创新。
随着精度要求的不断提高,舵机的精度和响应速度得到了显著的提升。
此外,一些新型材料和驱动技术的应用,也为舵机的进一步发展提供了更多可能性。
然而,舵机市场也面临一些挑战。
一方面,市场竞争激烈,产品同质化严重,价格战十分激烈。
另一方面,技术上的瓶颈和制造成本的不断上升也制约了舵机市场的发展。
电动舵机伺服系统的模型辨识及其校正
识 , 对 系 统 进 行 串联 校 正 。使 用 数 字 控 制 器 进 行 全 过 程 自动 测 试 并 将 数 据 上 传 计 算 机 ; 后 , 过 L v 法 将 测 得 的频 并 然 通 ey
率 特 性 数 据 辨识 为 较 高 精 度 的 传 递 函数 , 辨 识 得 到 的数 学 模 型 仿 真 结 果 与 频 率 特 性 测 试 数 据 进 行 比 较 。 比较 结 果 显 对 示 , 中 低 频 段 的 幅 值 最 大 绝 对 误 差 < o 8d , 位 最 大 绝 对 误 差 < 1 1。在 此 基 础 上 选 用 滞 后 超 前 校 正 器 对 系 统 进 行 在 . B 相 .。 校 正 , 正 后 系 统 带 宽 达 到 18rd s与 对 模 型 进 行 数 值 仿 真 得 到 的 结 果 14 rd s 比误 差 较 小 。 实 验 结 果 表 明 : 校 3 a/ , 2 a / 相 频
s s e f e e t o e h n c la t a o y t m o lc r m c a i a c u t r
ZHA NG i— a , I Hu , I Ho g g a g , Jab o L U i J A n — u n XUAN i g M n
iia i ha a t r s is o lc r me h nia c ua or h ys e m o e f ee t o c a c la t — tz ton c r c e itc fa e e t o c a c la t t 。t e s t m d lo l c r me h nia c ua
i o r le s us d t ut ng c nt o l rwa e o a oma ia l e tt e e tr o e s a e t d d t r pl a e o a PC. tc ly t s h n ie pr c s nd t s e a a we e u o d d t
基于自适应模糊PID算法的舵机控制器研究的开题报告
基于自适应模糊PID算法的舵机控制器研究的开题报告一、研究背景舵机是一种能够精准控制角度的电机,广泛应用于机器人、无人机、航模等领域。
在实际应用中,舵机控制器的性能直接影响着系统的稳定性、精度和响应速度等因素。
目前,常用的控制器包括PID控制器、模糊控制器、自适应控制器等。
这些控制器各有优缺点,在不同场景下表现也不尽相同。
二、研究目的本研究旨在设计和实现一种基于自适应模糊PID算法的舵机控制器,以提高舵机系统的运动控制精度和稳定性。
具体研究内容包括:1. 基于自适应模糊PID算法的舵机控制器设计。
2. 系统建模与控制参数优化。
3. 硬件实现与实验验证。
三、研究意义本研究的意义在于:1. 提高舵机控制系统的运动控制精度和稳定性,为机器人、无人机、航模等领域的应用提供更可靠的控制解决方案。
2. 发掘自适应模糊PID控制算法的应用价值,推进控制理论的发展和应用。
3. 开拓舵机控制器的研究方向,为相关领域的研究提供参考和借鉴。
四、研究方法和技术路线本研究的主要研究方法是基于实验和理论相结合的方法,具体技术路线包括:1. 文献调研和相关技术的学习。
2. 舵机系统建模与控制参数优化。
3. 基于自适应模糊PID算法的舵机控制器设计与模拟验证。
4. 舵机控制器硬件实现和实验验证。
5. 系统性能测试与分析,结果验证与总结。
五、预期成果及工作计划本研究的预期成果包括:1. 基于自适应模糊PID算法的舵机控制器设计方案和完整的系统实现。
2. 系统性能测试数据和实验结果,验证和分析研究成果。
3. 相关技术文献和研究报告。
研究工作计划如下:第一年1. 系统建模与控制参数优化。
2. 自适应模糊PID算法研究与模拟验证。
第二年1. 舵机控制器硬件实现和系统集成。
2. 系统性能测试与数据分析。
第三年1. 结果验证与总结。
2. 报告撰写和论文发表。
六、参考文献1. 张三、李四、王五。
基于模糊PID算法的无人机舵机控制器设计[J]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s e i crq i me t o h n u aa a d t e g n u ef rt ee t me ip td t. h o e t eR st e p c i e ur n rt ei p t t n h u me tr l o h x r u aa We c o s h I a h f e f d jd e n S
舵 机 带 宽 辨 识 方 法 研 究
丁 军辉 韩 忠 霖
(2 4 部队 9 9 91 2分队 葫芦岛 1 50 ) 2 0 1
第O 第2 2年2期 3 1 0 0 1 7 月 卷
摘
要 :本 文 首 先 简 要 介 绍 了电 动 舵 机 的工 作 特 性 和 舵 机模 型 的 选 取 , 出 舵 机 带 宽 的 具 体 计 算 方 法 。详 细研 究 了 给
由于计算机字长和舍入误差的影响会造成计算结果的误差这种误差会在递推过程中逐渐积累最终有可能导致综合考虑计算量和辨识精度实际的参数辨识过程辨识结果的严重错误
维普资讯
孽裁燕赫
EC(CM SE N TH IY IT)电子测量技术 N RI EUM T OG E AR E E O C
0 引
言
、死 区 线 形 区
Ab t a t Ac u t r c a a t rs i a d t e s lc i n o c u t rmo u e a e it o u e n t i p p r n h ac lt n sr c : t a o h r c e it n h ee t fa t a o d l r n r d c d i h s a e ,a d t e c lu a i c o o me h d o h c u t rS b n wi t sg v n Th u h r e p y i v s i a e t ePI t o ft ea t a o ’ a d d h i i e . e a t o s d e l n e t t h g S,e p ca l h e ald a i me i s e il t e d t i rt y e h t c p o e s o h Afe n l zn h i e e t e p n eo h d l o t e d fe e ti p t h ri l g v so tt e r c s ft ePIS t ra a y ig t ed f r n s o s ft emo u et h i r n n u ,t e a tce i e u h f r f
最小二乘辨识方法 , 中重 点讨论 实现最小二乘的具体算法步骤 。在 分析 了不 同的输入信 号对系统 辨识造成 的各种 其
影响后 , 本文给出实验 时对输 入信号的具体要求以及视为野值 的判决方法 。基 于特定 的舵 机辨识 问题 和高精 度辨识
的特性要求 , 本文选取参 数递推估 计策略作为具体的求解方法 , 推导 出详 细的算法 过程 。明确 阐述了加权 系数和遗 并 忘 因子 的具体用途 , 并用实验数据确定出加权系数和遗忘因子 。最后验证了辨识结果的合法性和辨识模型的准确性 。 关键词 :舵机带宽辨识 ;递推最小二乘法 ;加权系数 ;遗忘 因子 中图分类 号:T 8 1 P 0 文献标识码 :A
c m p t t n me h d b s n t e a t a o h r c e i t n h e u r me t fa c r c o u a i t o a eo h c u t rc a a t rs i a o c d terq i e n c u a y,a d t e ac lt h e ald o n h n c lu a e t ed t i e c mp t t n p o e s W e s e i c l x a i t h d o r p i u e o h i h u e n h mn s i f co n o u a i r c s . p c f al e p ta e t e i ig a h c s f t e weg t n mb r a d t e a e t a t r a o i y c d gv so tt e p r me e a u c o d n o t e e p r n . i a l i e u h a a t r v l e a c r i g t h x e i me t F n l y,t e e p rme tv r i s t e v l iy o h e u t h x e i n e i e h ai t f t e r s l f d s d t n h e a iy o h d l. a a a d t e v r ct ft e mo u e Ke wo d : Ac u t rS b n wi t y rs t a o ’ a d d h; RLS; weg tn mb r a e tc f co i h u e ; mn s i a t r
பைடு நூலகம்
Re e r hi f i e i ia i n m e ho f a t a o ’ a wi t s a c ng o d ntf c to t d o c u t r S b nd d h
DigJ n i Ha h n l n u hu nZ o gi n
( i 9 9 fPLA . uu a 2 0 Unt 2 41o H ld o 1 5 01)