第三章第四节 电力系统低频减载
第三章电力系统频率及有功功率的调节

这种有功负荷随频率而改变的特性叫做负荷的
功率—频率特性,是负荷的静态频率特性,也
称作负荷的调节效应。
2)电力系统中各种有功负荷与频率的关系
负荷的功率—频率特性一般可表示为
f
f2
fn
P
a
P
a
P
()
a
P
()
a
P
()
L
0
LN
1
LN
2
LN
n
LN
f
f
f
N
N
N
式中 f N —额定频率
P—系统频率为f时,整个系统的有功负荷
第一节 电力系统的频率特性
9)负荷的变动情况可以分成几种不同的分量:
一是变化周期一般小于10s的随机分量;
二是变化周期在10s~3min之间的脉动分量;
三是变化周期在3min以上的持续分量,负荷预测预报
这一部分。
10)第一种负荷变化引起的频率偏移,利用调速器来
调整原动机的输入功率,这称为频率的一次调整。
P
0
*
*
G
*
上式又称为发电机组的静态调节方程。
第一节 电力系统的频率特性
在计算功率与频率的关系时,常常采用调差
系数的倒数,
P
1
G
*
K
G
*
R
f*
KG*——发电机的功率-频率特性系数,或原动
机的单位调节功率。
一般发电机的调差系数或单位调节功率,可
采用下列数值:
对汽轮发电机组 R*=(4-6)%或KG* =16.6-25 ;
电力系统自动低频减载(整理)
电力系统自动低频减载电力系统频率及有功功率的自动调节1. 电力系统自动调频1.1电力系统频率波动的原因频率是电能质量的重要指标之一,在稳态条件下,电力系统的频率是一个全系统一致的运行参数。
系统频率的波动直接原因是发电机输入功率&输出功率之间的不平衡,众所周知,单一电源的系统频率是同步发电机转速的函数:60np f =n ――电机的转速,r/min ; f ――电力系统的频率,HZ ; p ――电机的极对数;对于一般的火力发电机组,发电机的极对数为1,额定转速为3000 r/min ,亦即额定频率为50HZ 。
此时,系统频率又可以用同步发电机的角速度的函数来表示:π2w f =为了研究系统频率变换的规律,需要研究同步发电机的运动规律。
同步发电机组的运动方程为:dtdw JT T T e m =∆=-mT ――输入机械转距;e T ――输出电磁转距(忽略空载转距,即负荷转距);J ――发电机组的转动惯量;dtdw ――发电机组的角加速度;由于功率和力矩之间存在转换关系(P=wT )上式经过规格化处理和拉氏变换后,可得传递函数:w H P P S e m ∆=-2P――原动机功率(发电机的输入功率);mP――发电机电磁功率;eH――发电机组的惯性常数;S――角速度变化量;w由此可知,当原动机功率和发电机电磁功率之间产生不平衡的时候,必然引起发电机转速的变化,即引起系统频率的变化。
在众多发电机组并联运行的电力系统中,尽管原动机功率P不是恒定不变的,但它主要m取决与本台发电机的原动机和调速器的特性,因而是相对容易控制的因素;而发电机电磁功率P的变化则不仅与本台发电机的电磁特性有关,更取决于电力系统的负荷特性,是难以控e制的因素,而这正是引起电力系统频率波动的主要原因。
1.2调频的必要性电力系统的频率变动对用户、发电厂和电力系统本身都会产生不良的影响,所以必须保持频率在额定值50hz上下,且其偏移量不能超过一定范围。
电力系统自动低频减载

page21
装置动作顺序
2019/11/2
page22
装置动作顺序
f 2f ft f y f-最大误差频率0.15 ~ 0.015Hz ft-对应于t的频率变化0.15Hz f y-频率裕度0.05Hz
★一般0.5Hz,对于微机式装置,可达0.2~0.3Hz
2019/11/2
★负荷的频率调节效应系数:衡量调节效应的大小。
PL*
2019/11/2
标么值K L*
tan
dPL* df*
PL* f*
有名值K L
PL f
换算关系K L*
KL
*
fN PLN
f* f P P fN * P
KL
K
L*
*
PLN fN
K L* * PLN
page7
电力系统自动低频减载
内容 一、低频减负荷原理 二、最大功率缺额及切除功率计算 三、装置动作顺序 四、各轮最佳断开功率 五、低频减负荷相关问题 六、低频减负荷装置简介
2019/11/2
page2
一、电力低系频统减低频负减荷负原荷理的重要性
Pt
A
B
★情况1:B系统负荷突然增加 ★情况2:A系统电源突然减少 ★情况3:系统间一条联络线突然切除 ★结果:出现功率缺额,系统频率降低,可能失稳
2019/11/2
page3
二、电低力频系统减频负率荷控原制理的基本方法
m
m
m
PTi PGi PLi
1
1
1
一次调频
☆控制频率
★发电侧:控制 原动机出力
二次调频 经济运行
第三章第四节--电力系统低频减载

第四节电力系统低频减载一、概述1)事故情况下,系统可能产生严重的有功缺额,因而导致系统频率大幅度下降。
2)所缺功率已经大大超过系统热备用容量,只能在系统频率降到某值以下,采取切除相应用户的办法来减少系统的有功缺额,使系统频率保持在事故允许的限额之内。
3)这种办法称为按频率自动减负荷。
中文简拼为“ZPJH”,英文为UFLS(Under Frequency Load Shedding)。
二、系统频率的事故限额(1)系统频率降低使厂用机械的出力大为下降,有时可能形成恶性循环,直至频率雪崩。
(2)系统频率降低使励磁机等的转速也相应降低,当励磁电流一定时,发送的无功功率会随着频率的降低而减少,可能造成系统稳定的破坏。
发生在局部的或某个厂的有功电源方面的事故可能演变成整个电力系统的灾难。
(3)电力系统频率变化对用户的不利影响主要表现在以下几个方面:①频率变化将引起异步电动机转速的变化,有这些电动机驱动的纺织、造纸等机械产品的质量将受到影响,甚至出现残、次品。
②系统频率降低将使电动机的转速和功率降低,导致传动机械的出力降低。
③国防部门和工业使用的测量、控制等电子设备将因为频率的波动而影响准确性和工作性能,频率过低时甚至无法工作。
“电力工业技术管理法规”中规定的频率偏差范围为±0.2~±0.5Hz。
(4)汽轮机对频率的限制。
频率下降会危及汽轮机叶片的安全。
因为一般汽轮机叶片的设计都要求其自然频率充分躲开它的额定转速及其倍率值。
系统频率下降时有可能因机械共振造成过大的振动应力而使叶片损伤。
容量在300MW 以上的大型汽轮发电机组对频率的变化尤为敏感。
例如我国进口的某350MW机组,频率为48.5Hz时,要求发瞬时信号,频率为47.5Hz时要求30s跳闸,频率为47Hz时,要求0s跳闸。
进口的某600MW机组,当频率降至47.5Hz时,要求9s跳闸。
(5)频率升高对大机组的影响。
电力系统因故障被解列成几个部分时,有的区域因有功严重缺额而造成频率下降,但有的区域却因有功过剩而造成频率升高,从而危及大机组的安全运行。
低频减载保护原理(含图)
低周减载保护(低频)
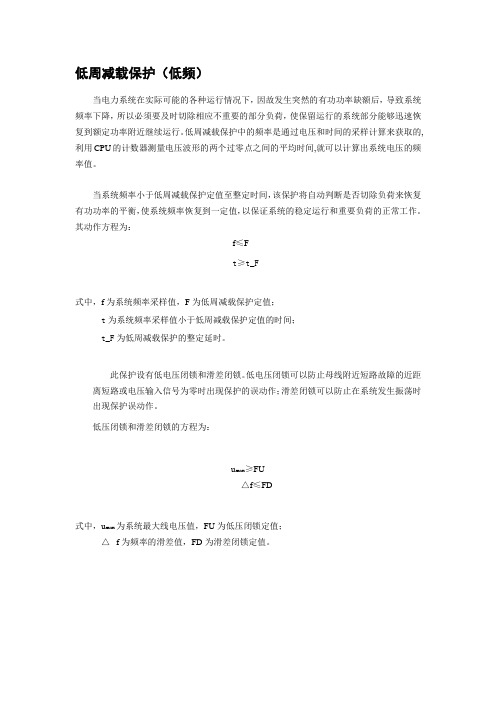
当电力系统在实际可能的各种运行情况下,因故发生突然的有功功率缺额后,导致系统频率下降,所以必须要及时切除相应不重要的部分负荷,使保留运行的系统部分能够迅速恢复到额定功率附近继续运行。
低周减载保护中的频率是通过电压和时间的采样计算来获取的,利用CPU的计数器测量电压波形的两个过零点之间的平均时间,就可以计算出系统电压的频率值。
当系统频率小于低周减载保护定值至整定时间,该保护将自动判断是否切除负荷来恢复有功功率的平衡,使系统频率恢复到一定值,以保证系统的稳定运行和重要负荷的正常工作。
其动作方程为:
f≤F
t≥t_F
式中,f为系统频率采样值,F为低周减载保护定值;
t为系统频率采样值小于低周减载保护定值的时间;
t_F为低周减载保护的整定延时。
此保护设有低电压闭锁和滑差闭锁。
低电压闭锁可以防止母线附近短路故障的近距离短路或电压输入信号为零时出现保护的误动作;滑差闭锁可以防止在系统发生振荡时出现保护误动作。
低压闭锁和滑差闭锁的方程为:
u max≥FU
△f≤FD
式中,u max为系统最大线电压值,FU为低压闭锁定值;
△f为频率的滑差值,FD为滑差闭锁定值。
保护信号出口
保护动作出口F
f
f
图5-7 低周减载保护原理逻辑图。
电力系统低频减载自动装置——控制电路【文献综述】
毕业设计开题报告电气工程及其自动化电力系统低频减载自动装置——控制电路一、前言电力系统的频率是电能质量的重要指标之一,在稳定状态下电力系统的频率一般是一个全系统统一的运行参数,在正常运行的情况下电力系统能够通过热备用容量来调节正常的有功缺额带来的频率的变化。
但是在系统出现事故的情况下,有可能产生严重的有功缺额,出现系统频率的大幅度下降。
在这个时候系统所缺少的有功功率已经远远大于系统的热备用容量,只能在系统的频率下降到某一预定值的时候,采取切除相应用户来减少系统的缺额,维持系统的频率稳定,这一方法我们称之为电力系统的低频减载。
1、低频减载的发展概况现代电力系统不断通过建设新型大规模变电站、大容量机组不断并入网内,使得电力系统的规模不断扩大,但同时也削弱了系统在大动下维持频率稳定的能力,极易发生恶性频率事故,导致全系统的瓦解。
国内外近些年来发生了一系列频率异常事故以及因此而导致大规模停电时事故,使得频率控制特别是极端事故下的频率控制成为近年来电力系统研究的热点问题之一。
如2007年欧盟“11。
4”停电事故和我国河南电网发生的“7。
1”事故等,故障分析表面都和频率调整有较大的联系。
面对这种严峻的局面,各国电力系统都把研究频率稳定作为十分重要的研究课题。
电力系统的频率稳定一般规划为电力系统的长期动态分析,主要研究电力系统受到扰动后同步稳定过程已基本结束时电力系统的频率动态行为。
与电压的稳定和功角的稳定相比,频率稳定的研究显的很不够。
事实上功角失稳、电压崩溃和频率崩漏的发生许多情况下都是同时存在、相互关联并且相互激发的。
显然不能只重视前两者而忽略第三者。
近些年多次惨痛的大停电事故表明电力系统的频率稳定已经成为相当严重问题。
[1]2、电力系统低频减载的意义《电力系统安全稳定导则》将电力系统的扰动分为三类:第一类为常见的普通故障,要求系统在承受此类故障时能保持稳定运行与正常供电;第二类故障为出现概率较低的较严重的故障,要求系统在承受此类故障时能保证稳定运行,但允许损失部分负荷;第三类故障为罕见的严重复杂故障,电力系统在承受此类故障时,如不能保持系统稳定运行,则必须防止系统崩溃并尽量减少负荷损失。
第三章-电力系统频率及有功功率的自动调节

PG=f (f)
P
PL PG P (KG KL )f Kf
K
KG
KL
PL f
所有机组均 机组装有 无调速器 调速器
KG
PGN fN
KL
PLN fN
PL f
当负荷增加后,依靠调速器动作实现了频率
KG
PGN PLN
KL
PL f
的一次调节,会使电网的频率有所上升,但频 率值仍然偏离额定频率,如果负荷变动较大,
电力系统自动化
第三章 电力系统频率及有功功率的自动调节
第一节 电力系统的频率特性
➢每分钟转数
n
n
➢每秒钟转数
60
➢系统频率 ➢正常情况
➢负荷突然变动而使发
电机组电功率增加PL
f Pn 60
m
m
PTi PGi
1
1
m
m
PTi PGi PL
1
1
m
1
PTi
m 1
PGi
PL
d dt
m
条直线。
频率下降的特性有利于
PL
系统中有功功率在另一
频率值下重新平衡。这
种现象称为负荷的频率 调节效应。
PLN
β
KL
tg
PL f
KL
PL f
KL
KL
fN PLN
0
fN
f
图负6-3荷的负静荷态的频静态率频特率性特性
电力系统自动化
第三章 电力系统频率及有功功率的自动调节
KL
dPL df
KL
dPL df
5.调节特性的失灵区
f
fN
fW
fW
PW PW
低频减载
频率降低对电力系统的影响
3、发生电压崩溃现象
励磁机、发电机转速下降 频率降低
电压水平下降
2012-10-10
加剧无功不足
电动势下降
3
1、电力系统频率的静态特性
•在电力系统出现较大的功率缺额时,如能在较低的频率维持运 行,主要是依靠负荷频率特性的调节作用。
•当频率降低时,负荷按照自身的频率特性自动地减少了从系统 中所吸收的功率,使之与发电机发出的功率尽可能的保持平衡。 此时,系统所减少的功率就是系统的功率缺额。
低电流 整定 控制整定 电路 整定值 输入电路
i 1
P
k 1 Lk *
i 1
Lk *
K
L*
f i*
1
P
k 1
i
Lk *
K
L*
f h*
P
k 1
K L * f i* f h * 1 K L* f h*
2012-10-10
18
(5)自动减载装置的延时与防止误 动作 电压急剧下降
(1)系统缺额功率 Pi 1
Pi 1 PLN
i 1
fi f N fi
fi fN
K L*
PLk
系统缺额由负荷调节 效应来补偿
k 1
Pi 1*
1
i 1
k 1
P Lk * K
L*
f i*
2012-10-10
17
2012-10-10
6
2、电力系统频率的动态特性
以单机单负荷为例:
研究电力系统频率的动态过程
J d dt M
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四节电力系统低频减载一、概述1)事故情况下,系统可能产生严重的有功缺额,因而导致系统频率大幅度下降。
2)所缺功率已经大大超过系统热备用容量,只能在系统频率降到某值以下,采取切除相应用户的办法来减少系统的有功缺额,使系统频率保持在事故允许的限额之内。
3)这种办法称为按频率自动减负荷。
中文简拼为“ZPJH”,英文为UFLS(Under Frequency Load Shedding)。
二、系统频率的事故限额(1)系统频率降低使厂用机械的出力大为下降,有时可能形成恶性循环,直至频率雪崩。
(2)系统频率降低使励磁机等的转速也相应降低,当励磁电流一定时,发送的无功功率会随着频率的降低而减少,可能造成系统稳定的破坏。
发生在局部的或某个厂的有功电源方面的事故可能演变成整个电力系统的灾难。
(3)电力系统频率变化对用户的不利影响主要表现在以下几个方面:①频率变化将引起异步电动机转速的变化,有这些电动机驱动的纺织、造纸等机械产品的质量将受到影响,甚至出现残、次品。
②系统频率降低将使电动机的转速和功率降低,导致传动机械的出力降低。
③国防部门和工业使用的测量、控制等电子设备将因为频率的波动而影响准确性和工作性能,频率过低时甚至无法工作。
“电力工业技术管理法规”中规定的频率偏差范围为±0.2~±0.5Hz。
(4)汽轮机对频率的限制。
频率下降会危及汽轮机叶片的安全。
因为一般汽轮机叶片的设计都要求其自然频率充分躲开它的额定转速及其倍率值。
系统频率下降时有可能因机械共振造成过大的振动应力而使叶片损伤。
容量在300MW 以上的大型汽轮发电机组对频率的变化尤为敏感。
例如我国进口的某350MW机组,频率为48.5Hz时,要求发瞬时信号,频率为47.5Hz时要求30s跳闸,频率为47Hz时,要求0s跳闸。
进口的某600MW机组,当频率降至47.5Hz时,要求9s跳闸。
(5)频率升高对大机组的影响。
电力系统因故障被解列成几个部分时,有的区域因有功严重缺额而造成频率下降,但有的区域却因有功过剩而造成频率升高,从而危及大机组的安全运行。
例如美国1978年的一个电网解列,其中1个区域频率升高,六个电厂中的14台大机组跳闸。
我国进口某600MW机组,当频率升至52Hz时,要求小于0.3s跳闸。
(6)频率对核能电厂的影响。
核能电厂的反应堆冷却介质泵对供电频率有严格要求,如果不能满足,这些泵将自动断开,使反应堆停止运行。
综上所述,运行规程要求电力系统的频率不能长时期的运行在49.5~49Hz 以下;事故情况下不能较长时间的停留在47Hz以下,瞬时值则不能低于45Hz。
所以在电力系统发生有功功率缺额的事故时,必须迅速断开相应的用户,使频率维持在运行人员可以从容处理的水平上。
然后在逐步恢复到正常值。
由此可见,按频率自动减负荷装置“ZPJH ”是电力系统一种有力的反事故措施。
三、系统频率的动态特性电力系统出现功率缺额时,系统的稳定频率f ∞必然低于额定频率f e ,系统频率从f e 变化到f ∞的过程就反映出电力系统的动态频率特性。
系统频率变化不是瞬间完成的,而是按指数规律变化,其表示式为()e T f f f f f te -∞∞-+=(3-46)式中f ∞——由功率缺额引起的另一个稳定运行频率T f ——系统频率变化的时间常数,它与系统等值机组惯性常数以及负荷调节效应系数*L K 有关,一般在(4~10)间。
大系统T f 较大,小系统T f 较小。
四、自动低频减载(按频率自动减负荷装置“ZPJH ”)的工作原理f ef f ∞f 图3-23 系统的动态频率特性f f 1(∞f e f f 2(∞f )0(∞f“轮”:计算点f1、f2……fn点1:系统发生了大量的有功功率缺额点2:频率下降到f1,第一轮继电器起动,经一定时间t1∆点3:断开一部分用户,这就是第一次对功率缺额进行的计算。
点3-4:如果功率缺额比较大,第一次计算不能求到系统有功功率缺额的数值,那么频率还会继续下降,很显然由于切除了一部分负荷,功率缺额已经减小,所有频率将按3-4的曲线而不是3-3'曲线继续下降。
点4:当频率下降到f2时,ZPJH的第二轮频率继电器启动,经一定时间t2∆后点5:又断开了接于第二轮频率继电器上的用户。
点5-6:系统有功功率缺额得到补偿。
频率开始沿5~6曲线回升,最后稳定在f)2(∞。
逐次逼近:进行一次次的计算,直到找到系统功率缺额的数值(同时也断开了相应的用户)。
即系统频率重新稳定下来或出现回升时,这个过程才会结束。
五、最大功率缺额的确定1)保证在系统发生最大可能的功率缺额时,也能断开相应的用户,避免系统的瓦解,使频率趋于稳定。
2)对系统中可能发生的最大功率缺额应作具体分析:有的按系统中断开最大容量的机组来考虑;有的要按断开发电厂高压母线来考虑等。
如果系统有可能解列成几部分运行时,还必须考虑解列后各部分可能发生的最大功率缺额,这时整个系统的最大功率缺额应按各部分最大功率缺额之和来考虑。
,所以这是一项要从系统调度角度进行协调的任务。
4) 系统功率最大缺额确定以后,就可以考虑接于减负荷装置上的负荷的总数。
要求恢复频率f hf 可以低于额定频率。
5) 考虑到负荷调节效应,接于减负荷装置上的负荷总功率P JH 可以比最大功率缺额P qe 小些。
根据负荷调节效应系数公式%%/)(/)(*f P f P f f f P P P K fhf fhf ee fhefhe fhf L ∆∆∆∆==--=**可以得到***=-=--hf L ehfe L JHx JH qe f K f f f K P P P P ∆或 ****--=hf l hf x l qe JH f K f P K P P ∆∆1(3-47) 式中f hf *∆——恢复频率偏差的相对值,并=∆f hf *f f f ehfe -;x P ——减负荷前系统用户的总功率。
式(3-47)中所有功率都是额定频率下的数值。
例 3-3 某系统的用户总功率为fhe P =2800MW ,系统最大的功率缺额P qe =900MW ,负荷调节效应系数*L K =2,自动减负荷动作后,希望恢复频率值f hf =48Hz ,求接入减负荷装置的负荷总功率P JH 。
解 减负荷动作后,残留的频率偏差相对值f hf *∆04.0504850=-=由式(3-47)得*f ∆图3-25 例3-3示意图P JH 04.021280004.02900⨯-⨯⨯-==734MW六、各轮动作功率的选择 1) 第一级动作频率一般第一级动作频率选择要高一些,减负荷控制装置的效果就好一些。
但是又可能在系统备用容量还未来得及发挥作用,而使频率暂时下降时,不必要地断开部分用户。
一般的一级启动频率整定在49Hz 。
2) 最后一轮的动作频率对高温高压火电厂,在频率低于46~46.5Hz 时,厂用电已不能正常工作。
在频率低于45Hz 时,电压可能大量降低,严重时,可能使电力网瓦解。
因此,自动减负荷装置最后一轮的动作频率最好不低于46~46.5Hz ;当然对于备用容量充裕的火电系统和以水电为主的系统,如果必要,也允许稍低一些,但不应低于45Hz 。
3)前后两级动作的频率间隔前后两级动作的时间间隔是受频率测量元件的动作误差和开关固有跳闸时间限制的。
最严重的情况是前一级测量元件具有负误差、后一级具有正误差,相应的频率误差为y t e f f f f ∆+∆+∆=∆2(3-48)式中e f ∆——频率元件的最大误差;f t ∆——对应于t ∆时间内的频率变化,一般可取0.15Hz ;f y ∆——两级间留有的频率裕度值,一般可取0.05Hz 。
采用级数不多的低频减负荷控制措施,有时可能减负荷过多,使频率上升过高,有时又可能减负荷不足,造成频率下降过低。
为此,可采用增加级数的和缩小各级之间级差的方法来解决。
七、各轮最佳断开功率的计算1) 系统频率的最后稳定值在最大恢复频率f i hf ⋅⋅max 与最小恢复频率f i hf ⋅⋅min 之间 2) (f i hf ⋅⋅max -f i hf ⋅⋅min )是正比于ZPJH 第i 次的计算误差的3) 当ZPJH 动作后,可能出现的最大误差为最小时,ZPJH 就具有最高的选择性。
4) f hf min ⋅事实上等于特殊轮的动作频率f ts dz ⋅5) 一般情况下,各轮的f i hf ⋅⋅m ax 是不同的,而ZPJH 的最终计算误差则应按其中最大的计算。
根据极值原理,显而易见,要使ZPJH 装置的误差为最小的条件是:f hf 1max ⋅⋅=f hf 2max ⋅⋅=……=f n hf ⋅⋅max =f hf 0(3-49)6) 各轮恢复频率的最大值f hf 0可考虑如下:当系统频率缓慢下降,并正好稳定在第i 轮继电器的动作频率f dzi 时,第i 轮继电器动作,并断开了相应的用户功率P i ∆,于是频率回升到这一轮的最大恢复频率f i hf ⋅⋅max 。
特性a :表示第i 轮动作前的系统负荷调节特性;特性b :表示第i 轮动作后的系统负荷调节特性。
f dzi f hf 0f ef按上述假定,第i 轮动作前频率正好稳定在f dzi ,图中表示此时负荷调节效应的补偿功率为P bi ∆,根据负荷调节效应系数公式,有eDZI L i k kx bif P K P P P ∆∆∆*-==-∑11式中 ∑∆-=11i k k P ——ZPJH 装置前1-i 轮断开的总负荷功率。
为了简化起见,把所有功率都以ZPJH 装置动作前的系统总负荷P x 的百分值来表示。
则e dzi L i k k bif P K P P ∆∆∆*-=⎪⎭⎫ ⎝⎛-=∑%100%11如果此时轮到第i 轮动作了,频率就会回升到f hf 0,负荷调节效应的补偿功率%0P bhf ∆相应为e hf L i k k bfh f f K P P 0110%100%∆∆∆*-=⎪⎭⎫⎝⎛-=∑由于=∆%P bi %0P bhf ∆+%P i ∆所以 ()()⎥⎥⎦⎤⎢⎢⎣⎡---⎪⎭⎫ ⎝⎛-=**-=∑0011%100%hf e L e dzi hf L i k k i f f K f f f K P P ∆∆(3-50)利用式(3-49)将各轮断开功率整理如表3-1。
ZPJH 装置各轮断开功率之和%1∑∆=nk k P 应等于ZPJH 装置总的减负荷功率%P JH ,由式(3-47)可得,ZPJH 装置总得减负荷功率用系统全部负荷P x 的百分值表示时,为%12%%1100∑=--=-=***n k i hf L hf L qe JH P f K f K P P ∆∆∆(3-51)表3-1 各轮断开功率联立表3-1诸式及式(3-51)可解出f hf 0,然后在按表3-1逐轮求出应断开的功率。