谷物联合收割机讲解
联合收获机结构与维修分解
3
谷物联合收割机的结构与维修
• ③悬挂式。是将联合收割机悬挂在拖拉机上,收割台位于 前方,脱粒机位于后方,中间输送装置在一侧,如珠江2.5联合收割机。悬挂式联合收割机的优点是造价较低,机 动性较好,收割时能自行开道,拖拉机可全年充分利用; 缺点是装卸费工,整体性差,驾驶时视野受限制。
20:41:35
20:41:35 28
谷物联合收割机的结构与维修
20:41:35
29
谷物联合收割机的结构与维修
• 2.气液式仿形装置 • 近年来,国外已有较多的联合收割机采用气液仿形装置来代替弹簧仿形装
20:41:35
19
谷物联合收割机的结构与维修
• 2.伸缩扒指式拾禾器 • 其构造与联合收割机割台螺旋输送器的伸缩扒指机构相同。 它由扒指式拾禾滚筒、侧挡板和机架等组成。滚筒由主轴、 转筒、偏心轴和扒指等构成,如图6.57所示。其扒指机构 如图6.58所示,偏心轴位置不变Байду номын сангаас工作时也不转动,扒指 一端空套在偏心轴上,扒指另外一端从滚筒上的孔中伸出, 由滚筒带动其转动。
20:41:35
10
谷物联合收割机的结构与维修
• 抛到逐稿器上的长茎秆及其夹杂物,在逐稿器的作用下, 夹在其中的籽粒等小杂物通过键面筛孔,沿键底滑落至抖 动板上,与穿过两个滚筒凹板筛孔的籽粒等脱出物,一起 进入清粮室;长茎秆则被排出落到集草箱。当茎秆聚集到 一定重量.集草箱便自动打开,茎秆即堆放在田间。
20:41:35
11
谷物联合收割机的结构与维修
• 2. 自走式联合收割机 • (1)一般结构。北京4LZ-2.5型自走式联合收割机由割台、 倾斜输送器、脱粒装置、分离清选装置、发动机、传动和 行走机构、液压系统、电气设备及操纵驾驶系统等构成, 如图6.55所示。
液压教学课件09- 谷物联合收割机 Case 2366

5、在全面读懂整个系统的基 础上,归纳总结系统 总结系统的特点,加深理解。
结构上的特点 性能上的特点 使用上的特点
液压操纵系统
液压操纵系统由两个油泵分别供油,由齿轮 泵供油系统和限压泵系统组成。
限压泵系统向下列工作部件供油: 收割台升降、拨禾轮升降、拨禾轮前后水平 调节、割台左右仿形调节、全液压转向、分离 装置驱动离合器操纵。 液压操纵系统均是闭心式系统,系统处于中 立位置时,系统维持在高压小流量状态,功率 消耗小。
控制液压油泵
限压油泵
控制油路
回油箱
割台左右仿形调节 拨禾轮前后移动
拨禾轮升降
卸粮搅笼摆动
割台升降
收割台升降 限压油泵 回油 控制油泵
提升控制阀
下降控制阀
割台左右仿形
拨禾轮升降
提升 下降
拨禾轮前后移动
割台左右仿形
拨禾轮驱动控制阀
卸粮搅笼驱动 离合器控制
顺序阀
脱粒装置离 合器控制阀
制动器脚 踏控制阀
4、根据农机设备中各执行元件的关系,分析 各块之间的联系,如:
同步性、顺序、互锁等
5、在全面读懂整个系统的基础上,归纳总结系统 总结系统的特点,加深理解。
结构上的特点 性能上的特点 使用上的特点
1、了解农业机械设备对液压系统的要求 即:液压传动部位 动作循环 负载变化情况 运动速度大小 执行元件之间的运动关系
齿轮泵供油系统
p o
喂入离合器控制油缸
压力油
拨禾轮驱动
割台升降控制油路系统 制动系统 喂入离合器控制系统
卸粮搅笼驱动 离合器油缸
电磁控制阀
喂入装置 电磁控制阀 离合器油缸
方向机
全液压转向
限压泵供油系统
联合收割机原理1割台讲解学习

联合收割机原理1割台第一节割台部分割台的作用是将站立的作物切割下来,并均匀地输送到过桥中。
其中包括:切割器、拨禾轮、中央搅龙及传动部件。
一、切割器切割器由动刀部分和定刀部分组成。
动刀部分包括:刀头、动刀片、刀条、铆钉等。
定刀部分包括:护刃器、刀梁、压刃器、摩擦片等。
其中动刀片是通过铆钉铆在刀条1.刀头2.刀杆3.4.5.刀梁6.7.8整动刀片在护刃器中的上下间隙的,摩擦片是用来调整刀条在护刃器中的前后间隙的。
切割器的调整包括以下几方面:(1)护刃器直线度的调整在检修时,应检查所有的护刃器是否在同有直线上,检查时可用一条细线对整割台两侧护刃器的尖部,观察其它护刃器尖部是否在该直线上,如不在同一直线上应在护刃器下部的固定螺母前后加垫片来找平。
(2)动刀片与护刃器对中的调整(W3拨禾轮的作用是将谷物引向切割器,弹齿和齿耙管引导作物的同时作为切割的扶持点,将切割下的谷物铺放在割台上,同时清理掉切割器上的禾秆,以利于割刀继续工作。
别切断作物高度的2/3处,如1-4图1-4拨禾轮过高会造成齿耙管打在作物的穗头上引起籽粒脱落,增加打击损失。
拨禾轮调的过低会造成拨禾轮回带或缠绕。
拨禾轮的高度是由液压油缸控制的,当拨禾轮油缸落到最低位置时,弹齿与切割器之间的间隙不能小于30mm,以防止弹齿插入割刀中。
调整时可通过两侧油缸的调整螺杆来完成,将螺杆向柱塞里拧间隙变小,向外拧间隙变大,调整后应将调整螺杆上的锁紧螺母拧紧。
(2)拨禾轮前后位置的调整在拨禾轮左右的支臂上各有9个孔,调整时可以通过孔位的窜动来改变拨禾轮前后的位置。
当收割比较高大的作物时拨禾轮应尽量向前调整,防止作物铺放在搅龙上方;当收割比较低矮的作物时拨禾轮尽量向后调整,防止割台上出现作物堆积造成喂入不均的现象。
在调整拨禾轮时应保证弹齿与搅龙的最小间隙大于50mm。
(3)弹齿倾角的调整在拨禾轮的侧面设有弹齿倾角的调节机构,调节板上装有两个滚轮支承偏心盘,调节板中央开有长圆孔用定位螺栓与滑动轴承座支架紧固在一起。
联合收割机简介介绍

割幅宽度
指联合收割机切割器在单次通过时能够覆盖的作 物行数。较宽的割幅可以提高作业效率,减少机 器在田间的转弯次数。
脱粒性能
脱粒系统是将谷物从穗上脱下来的关键部分。其 性能通常以脱粒干净度和脱粒损失率来衡量。高 效的脱粒系统能够确保谷物充分脱下,同时减少 不必要的损失。
高效率与高产能
作业效率高
联合收割机集成了切割、输送、脱粒 、清选等多个功能于一体,实现了从 田间到谷仓的一站式作业,大大提高 了作业效率。
维护保养
联合收割机是一种高精度、高效率的农业机械设备,需要定期进行维护保养。包括清洗机 器、更换磨损件、检查液压系统和电气系统等。良好的维护保养能够延长机器的使用寿命 ,并确保其稳定、高效地工作。
成功案例分享
案例一:北方某大型农场引入联合收割机进行小麦收割。通过合理的机 器配置和操作,实现了小麦的高效、清洁收割,减少了作物损失,提高 了农场的经济效益。
高产能输出
高性能的联合收割机在适宜的工作条 件下,能够实现高产能的谷物收获, 满足大规模农业生产的需求。
节约成本与提高收益
减少人工成本
使用联合收割机可以大幅度减少人工参与收获作业的需求,降低 了农业生产的人工成本。
减少损失,提高收益
联合收割机的高性能清选和脱粒系统可以减少谷物在收获过程中的 损失,从而提高了农民的收益。
。
分离部分
将脱粒后的混合物进行分离, 得到谷粒和秸秆,主要由清选 室、风扇、振动筛等构成。
输送部分
负责将各个部分的物料进行输 送,包括输送带、链条等输送
机构。
工作原理与流程
1. 割台部分启动,切割器切割作物。
5. 分离后的谷粒和秸秆分别由输送部分 送出,完成整个收割过程。
自走轮式谷物联合收割机(全喂入)的优势特点有哪些?

wxnongye08
目录
CONTENTS
自走轮式谷物联合收割机
01
(全喂入)2
(全喂入)基本配置和参数
自走轮式谷物联合收割机(全喂入)的主要特点
可靠性高 采用四联带主离合,传递功率大,使用可靠 后制动可调后桥,田间作业适应性强; 加强型杂余搅龙轴,可靠性高,维修方便 加强型拨禾轮结构,抗冲击,提高使用寿命,降低粮食损失 作业高效 粮箱容积大,作业时间长,工作效率高 加高加宽籽粒升运器,输粮速度快,作业效率高 技术先进 新型轴流滚筒,优化脱粒室设计,适应各种谷物脱粒分离,大功率、大扭矩脱粒分离效果好 超大清选面积,筛面宽,物料薄,清选分离效果好,干净高效,适应不同品种、不同成熟期的高效收割 经济实用 加强型同步器变速箱,优化变速箱传动比,提高行走速度,有效降低耗油量 人性化设计 圆弧型玻璃驾驶室,视野开阔 偏置式驾驶操纵系统,可调式方向机,汽车换挡结构,操作方便
自走轮式谷物联合收割机(全喂入)基本配置和参数
喂入量≥8kg/s; 自走轮式; 喂入方式:全喂入
自走轮式谷物联合收割机(全喂入)
自走轮式谷物联合收割机(全喂入)
自走轮式谷物联合收割机(全喂入)
自走轮式谷物联合收割机(全喂入)
自走轮式谷物联合收割机(全喂入)
谢谢观看
山东唯信 自走轮式谷物联合收割机(全喂入)
自走轮式谷物联合收获机(全喂入)的驱动系统技术研究
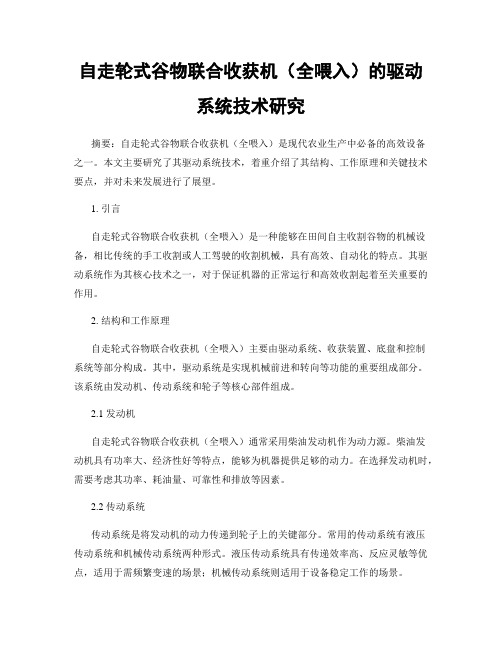
自走轮式谷物联合收获机(全喂入)的驱动系统技术研究摘要:自走轮式谷物联合收获机(全喂入)是现代农业生产中必备的高效设备之一。
本文主要研究了其驱动系统技术,着重介绍了其结构、工作原理和关键技术要点,并对未来发展进行了展望。
1. 引言自走轮式谷物联合收获机(全喂入)是一种能够在田间自主收割谷物的机械设备,相比传统的手工收割或人工驾驶的收割机械,具有高效、自动化的特点。
其驱动系统作为其核心技术之一,对于保证机器的正常运行和高效收割起着至关重要的作用。
2. 结构和工作原理自走轮式谷物联合收获机(全喂入)主要由驱动系统、收获装置、底盘和控制系统等部分构成。
其中,驱动系统是实现机械前进和转向等功能的重要组成部分。
该系统由发动机、传动系统和轮子等核心部件组成。
2.1 发动机自走轮式谷物联合收获机(全喂入)通常采用柴油发动机作为动力源。
柴油发动机具有功率大、经济性好等特点,能够为机器提供足够的动力。
在选择发动机时,需要考虑其功率、耗油量、可靠性和排放等因素。
2.2 传动系统传动系统是将发动机的动力传递到轮子上的关键部分。
常用的传动系统有液压传动系统和机械传动系统两种形式。
液压传动系统具有传递效率高、反应灵敏等优点,适用于需频繁变速的场景;机械传动系统则适用于设备稳定工作的场景。
2.3 轮子自走轮式谷物联合收获机(全喂入)通常采用橡胶轮子或金属履带作为行驶装置。
橡胶轮子具有重量轻、减震效果好等特点,适用于平整地形;金属履带则适用于复杂地形和泥泞地区。
3. 关键技术要点3.1 自主导航技术自走轮式谷物联合收获机(全喂入)需要具备自主导航能力,通过GPS和惯性导航等技术实现对机器的自主定位和路径规划。
同时,为了保证机器能够稳定运行,还需要具备避障和自动驾驶等功能。
3.2 多传感器融合技术为了提高机器对作物状态的感知能力,多传感器融合技术被广泛应用于自走轮式谷物联合收获机(全喂入)的驱动系统中。
通过融合视觉、红外、声音等多种传感器的数据,可以更准确地检测和识别作物,实现精确控制和高效收割。
联合收割机工作原理
联合收割机工作原理
联合收割机是一种农业机械,主要用于收割谷物作物,如小麦、大麦等。
其工作原理如下:
1. 作业前准备:联合收割机先将座舱倾斜至水平位置,以便操作员的视野更好。
然后,调整各个刀盘和切割机械的工作高度和角度,以适应不同作物的生长状态和高度。
2. 切割谷物:当联合收割机在田地中行驶时,刀盘和切割机械会同时旋转,切割并收集谷物梗。
刀盘上的锋利刀片能够快速而有效地割断谷物梗,将作物留在地面上。
3. 谷物输送:切割下来的谷物会被输送机构送往机械内部。
这些输送机构包括传送带、滚筒和链条等,它们将谷物顺利地转运到联合收割机的内部储存区或打包装置。
4. 对谷物进行处理:在联合收割机内部的储存区,谷物会经过清洁装置进行处理。
清洁装置可以除去杂质、秸秆和其他异物,并将干净的谷物暂时存放在机械内部。
5. 谷物储存和处理:清洁过的谷物可以被直接装运或存放在联合收割机的储存舱中,以待后续的运输和处理。
储存舱的容量较大,可以容纳大量的谷物。
综上所述,联合收割机主要通过切割、输送和处理谷物的方式,实现高效地收割作物的目标。
它的工作原理既涉及机械运转和输送,也需要操作员进行操作和调整,以确保作业的顺利进行。
目录谷物联合收割机简称联合收割机...
目录摘要 (1)前言 (2)1、绪论 (3)1.1 背景 (3)1.2 收割机简介 (4)1.3 清选装置 (10)2、产品方案的分析论证 (12)2.1 清选装置方案的论证分析 (12)3、二次清选装置的方案设计 (21)3.1 振动筛的运动机构设计 (22)3.2 清选系统传动方案设计 (22)3.3振动筛的设计 (24)3.4搅龙的设计 (28)4、机构的运动分析及动力分析 (29)4.1 机构的运动分析的任务、目的和方法 (29)4.2 用解析法作机构分析 (30)5、功率计算 (39)5.1 搅龙的功率消耗 (39)5.2 振动筛的功率消耗 (39)总结与体会 (40)致谢词 (41)参考文献 (42)摘要本设计主要是收割机清选系统的设计,在参照日本久保田公司的一款收割机的基础上进行改装设计。
本清选装置采用双风机双层振动筛结构,采用离心风机作为鼓风机置于震动筛下方,采用横流风机作为吸风机配置于振动筛后上方,增设了二次清选搅龙提高其清选效率。
振动筛采用曲柄摇杆运动机构,振动筛为双层筛,分前后两段,前段置于干净籽粒搅龙上方,上筛采用百叶窗筛,下筛采用编织筛;后段置于二次回收搅龙上方,上筛采用百叶窗筛,下筛采用编织筛;整个清选系统采用带轮传动,动力由发动机传入鼓风机轴,再由皮带将动力分级传于各个运动机构。
本设计还对振动筛的运动情况进行了系统仿真,对输入轴、轴承、皮带进行了设计计算。
【关键词】收割机,振动筛,运动分析,设计完整说明书和图纸请联系叩叩:360702501AbstractThis project is grain cleaning system for a combine harvester design,it based on a combine harvester which designed by a company of Japan .The cleaning system select double fan structure and double boult set, using centrifugal as blower fan and placed it below the vibration sieve. using a cross-flow fan as a suction fan and set it at the top of the vibration sieve. Add a secondary cleaning auger to improve the efficiency of the efficiency of the cleaning system. The vibration selects a crank-rocker mechanism. It is double layer set, separate it into two parts, and put the head part on the top of cleaning auger. Set the second part on the top of the secondary cleaning auger. The all system select strap to pass force, the force is produced by an engine and passed to each part by trap .And this project analyzed the vibration’s locomotion , checked the shaft and bearing’s intensions.【Key words】Combine harvester; Vibration sieve; locomotion analysis;Design前言随着我国经济发展水平的提高,特别是近几年国家惠农政策的实施,我国农业机械化发展水平有了长足的进步。
自走式谷物联合收割机工作原理
自走式谷物联合收割机工作原理
自走式谷物联合收割机是一种先进的农机设备,它能够自主地完成收割作业,极大地提高了农田作业效率。
下面将从工作原理方面来介绍这一令人惊叹的发明。
自走式谷物联合收割机利用先进的导航系统确定自身的位置和前进方向。
通过使用全球定位系统(GPS)和其他导航技术,它可以在田地中准确地定位,并根据预先设定的路径进行移动。
这样,它就能够自主地避开障碍物,确保收割作业的连续进行。
自走式谷物联合收割机配备了精密的传感器和切割装置。
传感器可以检测到作物的生长情况和成熟度,从而确定最佳的收割时间。
同时,切割装置可以根据作物的高度和密度进行自动调节,以确保收割的效果最佳。
自走式谷物联合收割机还配备了强大的收割和输送系统。
一旦作物被切割,它们将被输送到机器内部的收割系统中进行处理。
在这个系统中,作物将被清洁、割碎和分离。
同时,谷物的颗粒将被储存起来,以备后续的加工和销售。
自走式谷物联合收割机还拥有智能控制系统。
这个系统可以监测和调节机器的各项参数,以确保其正常运行和高效工作。
例如,它可以自动调节机器的速度和切割深度,以适应不同的田地和作物条件。
这样,它能够以最佳的方式完成收割作业,提高农田的产量和质量。
总的来说,自走式谷物联合收割机通过先进的导航系统、精密的传感器和切割装置、强大的收割和输送系统以及智能控制系统,实现了自主、高效的谷物收割作业。
它不仅提高了农田作业效率,还减轻了农民的劳动负担,为农业生产带来了革命性的变化。
相信随着技术的不断进步,自走式谷物联合收割机将在未来发挥更加重要的作用,为农业现代化发展做出更大的贡献。
联合收获机的基本组成
联合收获机的基本组成1.引言概述部分的内容可以从以下几个方面展开:1.1 概述联合收获机(Combine Harvester)是一种现代化的农业机械设备,多用于农田的小麦、大豆、玉米等谷物作物的收获工作。
它通过集成多种功能,包括割取、脱粒、清理和储存,极大地提高了农作物的收获效率和农民的劳动生产力。
随着农业科技的发展和农业生产的规模化趋势,联合收获机的应用逐渐成为现代农业必不可少的工具之一。
其高效的收割能力和全自动的操作系统,使得大面积农田的收获变得更加便捷、高效和经济。
本文将介绍联合收获机的基本组成,包括其主要部件和各个部件的功能。
接下来的章节将依次介绍联合收获机的定义和作用,以及结论部分对本文进行总结和展望。
通过本文的阐述,读者将能够更好地了解和认识联合收获机这一现代农业机械设备的基本构成,以及其在农业生产中的重要作用。
概述部分的内容应该简明扼要地介绍联合收获机的基本概念和对农业生产的重要性,为接下来的章节做好铺垫,引导读者更好地理解和阅读本文的内容。
1.2 文章结构文章结构部分的内容如下:文章结构部分旨在介绍本文所采用的整体组织结构,并对每个部分的内容进行简要描述,以便读者能够更好地理解整篇文章的构思和逻辑。
本文分为引言、正文和结论三个主要部分。
引言部分将从概述、文章结构和目的三个方面阐述本文的背景和意义。
首先,在概述中将简要介绍联合收获机的基本概念和背景信息,为读者提供必要的背景知识。
其次,文章结构部分将详细说明本文的整体组织结构,以帮助读者了解每个部分的内容和意义。
最后,目的部分将明确本文的撰写目的,即阐明为什么选择此主题并希望读者从中获得什么样的收获。
正文部分是本篇文章的核心内容,将进一步展开论述联合收获机的定义、作用以及基本组成。
首先,2.1节将详细介绍联合收获机的定义和作用,从理论层面上明确其基本概念和主要功能。
然后,2.2节将重点介绍联合收获机的基本组成,包括主要构件、工作原理以及各部件之间的协调配合关系等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0.33M P
(10-9)2M P
脱粒滚筒最大功率大约为平均功率的2倍。行走功 率消耗的变异系数随地面情况和土壤特性而异, 一般可达 11 %~ 25 %,考虑到负荷峰值持续的时 间很短,并可用运动部件的动能来补偿;而且脱 粒和行走的最大功率也不会同时出现,所以通常 总功率的变异系数 Wn取值为11%。取1/3的平均 功率作为功率储备,即设Kb = 3Wn,这样发动机 的总功率N的值为:
可根据q 、β求 出谷粒喂入量 Q,再通过产 量W求出面积 生产率A,再 通过割幅B就 可求出vm。
图10—1 谷物联合 收割机前进速度列 线图
现有谷物联合收割机的割幅和前进速度 的范围为:小型全喂入谷物联合收割机的 割幅为 1.7~2.5m ,大中型为 3.0~5m ,少数 大型机达 6 、 7m ;半喂入谷物联合收割机 的割幅为1.0~1.75m。
10. 3 谷物联合收割机的总体配置 进行谷物联合收割机的总体配置,就是 要合理地布置各个部件的位置,进一步确 定机器的总体尺寸;估算机器的重量和重 心位置;确定动力的传动路线;设计和布 置操纵机构及驾驶台;安排其他附件等。 总体布置必须协调各个部件之间以及整 机与部件之间的关系,对各个部件的重量、 尺寸提出控制要求;核查各个运动零件、 部件的运动空间,排除一切机械
二、谷物联合收割机总体设计的任务: 1) 根据设计任务,选择整机的结构型式和 工艺流程,初步拟定总体布置和各部件的 结构方案; 2) 确定整机的主要参数; 3) 进行总体布置,绘制平面布置图、割台 和拨禾轮升降的机动图、整机尺寸链图和 外形图;
4) 进行传动路线设计, 绘制传动图; 5) 设计和布置操纵机构、电路、液压系统 管路和附件等; 6) 设计测试和控制机构; 7)从整机性能出发,对各部件设计提出 要求,拟定各部件的主要参数,控制重量 和轮廓尺寸范围。
10. 2 联合收割机的动力选择
10. 2. 1 联合收割机功率消耗 (1) 联合收割机的动力需求:功率消耗 包 括行走功率和各工作部件运转时消耗的功率 两部分,变化范围大。 联合收割机所需功率是各部分所需功率的 总和,也就是各部分所需平均功率与储备功 率的总和。联合收割机在田间作业时,各部 分所需功率在总功率 P 中所占比例,经实验 统计分析,大致如图10-2所示。发动机功率 为55kW、
图10—3 全喂入谷物联合收割机喂入量 和滚筒扭矩的瞬时变化
从图中可以看出,喂入量q与滚筒上扭矩M的变 化基本上是一致的,扭矩与转速的乘积即为消耗的 功率。
引起上述各测量值变异的外界条件属于随 机变化的过程,测量值的变异符合正态分 布规律。设Mp为扭矩的平均值,σ为其均方 差,则扭矩变异系数Wn的值为: (10-8) Wn ( / M p ) 100 % 由误差理论可知,在 Mp±3σ 的范围内,包 括了各扭矩值出现几率的99.7%。根据实验 统计,脱粒滚筒功率消耗的变异系数因作 物的草谷比和湿度的不同而异,全喂入时 最大可达33%,即:
2)轮距 B0 (10-3) 1° 与割幅相适应 B0 B 2 b Δ——防止轮胎或履带压倒未割作物的 保护宽度,保证不压作物。 2° 与脱粒装置宽度相适应
B0 Bt 1 2 b
(10-4)
3°与作物行距相适应。 3)最小离地间隙H 影响通过性和稳定性。 一般 H= 250 ~ 300mm。
时,取η = 0.8。还可以增长逐稿器的长度 , 前面已讲过。 10. 1. 3 联合收割机的结构参数 联合收割机的结构参数主要包括行走装 置的轴距Lz、轮距 ( 轨距 ) B0、最小离地间 隙 H 和平均接地压力 Pp 。轴距和轮距 ( 轨 距 )直接和通过性、机动性和稳定性有关, 往往互相矛盾。 1)轴距Lz增大,稳定性增大,机动下降。 Lz减少,稳定性减少,机动性提高。 Lz= 3000 ~ 3700mm, JD-7700 Lz= 3730。
第10章 谷物联合收割机的 总体设计
一、谷物联合收割机总体设计的重要性
谷物联合收割机的设计包括零,部件的设计和总体 设计两个方面。一台机器设计的好坏,固然与每个 零、部件的设计有关,但对整机的性能起决定性影 响的却是总体设计。如果在设计中对整机缺乏通盘 考虑,即使各部件的设计是良好的,但合在一起却 不一定获得良好的结果。因此在设计时,必须首先 考虑总体设计,从整机的性能出发,对各部件提出 要求,使各部件能相互协调,使联合收割机能满足 技术任务书提出的要求 。
干涉现象;充分考虑机器的适应性能方 面的要求。 10. 3. 1 总体布置的要求 可以归纳为以下几点: ① 工艺过程连续、流畅,尤其是要特别注 意各个部件工作能力的平衡,注意交接过 渡部位的设计,保证谷物流的均匀、连续、 流畅,不发生堵塞、超负荷等故障。同时 要考虑作业过程中,对未割作物不发生压 禾、推禾、脱禾等现象。 ② 正确配置机器的重心。
1° 收割台的配置应该尽可能对称,小机 型偏右; 2° 割台应该尽量布置得靠近前轮; 3° 割台的提升高度一般为400~750mm, JD-7700割台的提升高度为850mm。 2)割台各部件的配置( T型) 1°护刃器梁至螺旋推运器中心的距离一般 Lh = 1.2~1.4Dj;(Dj—叶片的外缘直径) 2° 推运器叶片的外缘与割台的底板和后 挡板之间的间隙Δ下=10~20,Δ后〈 6;
图10—2 额定喂入量为5kg,/s的自走式全喂人 谷物联合收割机的功率平衡和逐稿器损失
额定喂入量为5kg/s,自走式谷物联合收 割机的实际生产能力与部件功率消耗之间 的关系曲线。从图中可以看出,随着机器 喂入量的增加,分离、清选、输送装置的 功率消耗没有多大的变化,割台的功率消 耗增加也不多,消耗功率最多的是脱粒滚 筒和行走部分,而且与喂入量成正比增加。 各部分的功率消耗以占总功率的百分比 来表示。Ng为割台功率消耗;Nt为脱粒滚 筒功率消耗; Nx为行走部分功率
N N P 3Wn N P (1 Kb ) N P 1.33N P
(2) 平均功率NP 和储备功率Nb:联合收割 机所需的平均功率NP和储备功率Nb,一般 是依靠试验测定的结果进行分析比较来确 定,或者利用经验公式来估算。
(a) 联合收割机的平均功率:不同形式的联 合收割机,其平均功率的经验公式也有所 不同;各国的经验公式也有所不同。每1kg /s喂入量所需平均功率称为单位喂入量所 需平均功率,用P [kW/(kg· s-1)] 表示。联合 收割机的平均功率NP 可以用式 (10-12)表示: N P p q ( kW ) (10-12) (b) 收割机的储备功率: Nb Kb N P Kb P q ( kW ) (10-13)
③ 创造良好的驾驶工作条件。 ④ 便于使用、调整、维修。特点 ⑤ 注意机器的外形美观。 10. 3. 2 全喂入传统型自走式谷物联合收 割机的总体布置 特点: 1 ) 收割台悬挂在脱粒(主)机的正前方, 构成T型配置; 2 ) 前轮驱动,后轮转向; 3 ) 主要工作部件基本按联合收割机的纵
轴对称布置; 4 ) 驾驶台位于脱粒机的前上方,视野开阔; 5 ) 发动机配置在脱粒部分的顶盖上 ( 或驾 驶室侧面 ),通风散热好; 6 ) 粮箱容积大,班次生产率高。 10. 3. 2. 1 割台、脱粒、清粮部件的相互配 置 1) 收割台与总体的相互配置
从式中可以看出,h与Bz 、η成反比, Bz 增加 h 减少,同样η增加 h 也减少。 B和滚筒长度有关,与纹杆滚筒配合工 z 作时,逐稿器的宽度可等于或稍大于滚筒 的长度。采用钉齿滚筒时,B也不应大于滚 筒长度的1.4倍。 η主要与机器的收缩比C ( 割幅与脱粒部分 宽度之比 ) 有关。 C= B/Lg C = 1.5~2.5时,取η = 0.9;C = 2.5~3.5
谷物联合收割机的工作速度是:全喂入自 走式一般为4~ 6km/h (1.11~1.65m/s), 全喂入悬挂式为3~4km/h ( 0.83~1.11m/ s ) ,半喂入自走式为 1.3~3km / h ( 0.35~ 0.83m/s)。
10. 1. 2 滚筒长度、分离器尺寸和收缩比 对全喂入谷物联合收割机工作部件的研 究表明,逐稿器的分离损失率是限制联合 收割机喂入量提高的关键。随着喂入量的 增加,茎秆层变厚 ,损失率加大,当喂入 量超过额定值时,损失率急剧增加 ( 图102 )。 谷粒在茎秆层中占的体积很小,假如忽 略不计,则逐稿器上茎秆层的厚度h可按下 式求得。
相 配合,使行走速度可以分档无级变速。
以便充分发挥机器的效能和保证工作质量。 设计几个割幅不同的割台,如JL1065就有 3.0m, 3.6m, 4.2m, 4.8m四种割台。 c. 列线图 计算不直观,还可以用列线 图求割幅B和前进速度vm。 所谓列线图就是以各参数为坐标轴,用 图线表示各参数之间关系的图。
B vmW 1 q 1 C
(10-1)
C ——常数,其作用是将单位产量化成 kg/m2,当W 以t/hm2为单位时, C = 10; 当W以斤/亩为单位时,C = l333; a.割幅B的选择原则 由上式可知,当其 他条件不变时,割幅B和前进速度vm之间成 反比关系。对于既定的设计喂入量,是选 择较小割幅配以较快的前进速度,还是采 用较大的割幅配以较慢的速度,这要根据 具体情况进行具体分析。 b. vm的选择原则 大多数联合收割机在行 走传动中都采用变速器与变速箱排档
发动机有近20%的功率储备 ( Nb ),即:
Nb ( N N g Nt N x N y ) / N ( % ) (10-7)
联合收割机负荷的不均匀性和因此引起 的功率消耗的变化,可以由田间实际测得 的行走速度、喂入量、谷层厚度、滚筒轴 上的扭矩和转速的瞬时变化的相关曲线来 分析。
总设计师应瞄准国际水平,通观全局,并及时掌 握各部件的设计进度,随时了解各部件设计中的 问题,尽快协调参数给予合理解决。 10. 1 谷物联合收割机的总体参数 10. 1. 1 割幅、前进速度和喂入量 谷物联合收割机的割幅和前进速度主要根据脱 粒机的设计喂入量、作物的单位面积产量和谷草 比来确定,它们之间的关系如下式所示: