阀控液压马达速度伺服系统仿真分析
阀控液压马达速度伺服系统仿真分析

阀控液压马达速度伺服系统仿真分析引言阀控液压马达速度伺服系统的负载具有较大的惯性与很小的阻尼,其传递函数常可近似由一对实部为零的极点组成,并有很低的动态响应,由于负载处在系统的闭环之中,所以它对阀控液压马达的动态品质有很大的影响。
此外,系统的负载常就是可变的,系统设计只能针对一种特定负载,负载一旦改变,系统的动态品质就会变坏,有时甚至失去稳定性,严重的影响了伺服系统的跟踪性能。
本文主要针对干扰力矩对系统的影响,利用结构不变性原理,消除干扰力矩对系统的影响,同时利用PID 控制理论来提高系统的动态性能。
1 阀控液压马达速度伺服系统模型建立阀控液压马达速度伺服系统的结构如图1所示。
液压马达的力矩方程为:fm m s l m T G s C J P +++=θ)(D (1)负载流量方程为:l em m l tm l sP Vs D P C βθ4Q +== (2)伺服阀的线性流量方程为:L p x l P K x k Q -= (3)电液伺服阀近似瞧成二阶振荡环节:122^2^)()(++=s S K s i s x svsvsv svv ωξω (4) 伺服放大器输出电流ΔI 与输入电压Ue 近似成正比,其传递函数可用伺服放大器增益Ka 表示:但通常的速度控制系统采用积分放大器,对原系统加以校正才能稳定工作。
校正后的积分放大器增益Ka 表示为:测速机速度传感器(测速机)的数学模型为:在上述公式中:v x 为电液伺服阀阀芯位移;i 为电液伺服阀输入电流;v sv k s sv ωξ、、分别为电液伺服阀的增益、阻尼系数与固有频率;m D 为马达排量;L Q 为马达的负载流量;x K 为流量增益系数;p K 为流量一压力系数;只为供油压力;s P 为负载压力;m θ为马达转速;e β为从油液有效体积弹性模数;V 为马达的总容积;J 为折算到马达输出轴上的转动惯量;f T 为外干扰力矩;tm C 为马达泄露系数;m C 为粘性阻尼系数;G 为扭簧梯度。
泵控马达速度伺服系统建模与仿真分析

S H E N W ), CUI Xia2
(1. Shanghai Ocean U n iv e rs ity ,C ollege o f E n g in e e rin g ,Shanghai 2 0 1 3 0 6 ,C h in a ;
摘 要 :泵控闭式系统工作效率高且油液不易被污染,因此大功率伺服系统都乐于采用此种控制方式。特别是电液比例变量泵和定
量马达组成的闭式液压控制系统,在泵控闭式系统中最为常见。该文运用MATLAB软 件 Srniul m k 模 块 和 SrniSCape模块,建立了交流
电动机驱动的电液比例变量泵控定量马达恒速控制系统时域仿真模型,取得了较好的仿真效果。通过仿真验证了泵马达流量耦合特
domain model is
desirable.By sim ulation,the influence on
constant speed control
performance
by f
hydraulic m otor,load disturbance and variable pump in p u t speed disturbance is ve rified . The influence on model sim plification of electro
恒转速控制是泵控马达速度伺服的一项重要内 容 。要实现马达的恒速控制,通常认为主要需克服三 方面的不利因素。首先是泵控马达闭式系统流量耦合
收 稿 日 期 :2017-12-20 作 者 简 介 :沈伟(1973- ) ,男 ,江苏常州人,讲师,博士,从事控制 理论与控制技术领域的科学研究。
泵控马达速度控制系统PID控制器的设计与仿真综述

泵控马达速度控制系统P I D控制器的设计与仿真综述(总52页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--石家庄铁道大学毕业设计泵控马达速度控制系统PID控制器的设计与仿真Design of PID Controller for Pump Controlled Motor Speed Control System2016 届电气与电子工程学院专业电气工程及其自动化学号学生姓名武云飞指导教师郑海青完成日期 2016年6月 11 日摘要随着科学水平的发展,泵控马达系统越来越多的应用于民用以及军用领域,这是由于泵控马达具有一些其他系统不具备的优点,该系统效率高、转动惯量小同时其响应速度迅速。
然而泵控马达系统在实际的生产生活中常常会出现系统负载频繁变化的情况,这种情况会导致系统的输出速度不稳定,严重时可能导致系统的瘫痪。
本设计的目的就是为了寻找一个较为适合泵控马达系统的控制系统用以克服外负载以及模型变化对系统产生的影响。
通过对泵控马达系统的组成的学习和研究以及对液压回路的工作原理的分析,建立起泵控马达速度控制系统的数学模型,借此来实现对泵控马达速度控制系统的仿真模拟。
在该数学模型的基础上,采用PID控制器作为系统的控制环节,分别对传统PID控制器、位置式PID控制器、增量式PID控制器以及抗积分饱和PID控制器进行系统的仿真模拟,通过对系统进行仿真,比较在外负载干扰的情况下马达转速的响应曲线,从而得出哪种PID控制器更适合泵控马达调速系统。
经过仿真分析对比,可以看出,抗积分饱和PID控制器较其他三种PID控制器有着更短的调节时间以及平滑的曲线,能更符合系统对于马达转速控制的要求。
所以最终选择抗积分饱和PID控制器作为系统的控制环节。
关键词:泵控马达;PID控制器;仿真AbstractWith the development of technology, pump controlled motor system more and more applied in civil and military fields, this is because the pump controlled motor system has some advantages that other systems do not have, this system is highly efficient, low mom -ent of inertia, and fast response. However, pump controlled motor system often appears system load change in actually, the load change can cause the system output speed not stable, severe cases may lead to paralysis of the system. The purpose of this design is to find a suitable control system that can solve to the impact of load changes.Through to the study of pump controlled motor system and the analysis of the hydraulic circuit, we establish the mathematical model of pump controlled motor system, with the system, we can realize the simulation of the pump controlled motor control system. On the basis of the mathematical model, we simulate the traditional PID controller, posi -tional PID controller, incremental PID controller and anti-windup PID controller for respectively. By compare the motor speed response curve which in the case of external load disturbance, which PID controller we can draw is more suitable for pump controlled motor speed control system. Through simulation comparison, we can get that anti-windup PID controller has a more smooth curve and a shorter adjusting time. So we finally choose anti-windup PID controller as the control link of the system.Key words:pump motor control;t he PID controller;simulation目录第1章绪论 0课题研究的背景意义 0PID控制器简介 (2)主要内容 (4)第2章泵控马达调速系统模型的建立 (5)泵控马达调速系统基本原理 (5)时域数学模型 (6)电-机械转换元件的模型建立 (6)比例方向控制阀4WRA6的模型建立 (7)变量泵的阀控液压缸模型的建立 (8)活塞-斜盘倾角环节模型的建立 (10)建立泵控马达的回路模型 (11)速度传感器以及比例放大器的模型建立 (13)建立系统的开环传递函数 (14)系统中各环节参数的整定 (16)求解比例放大器的增益系数 (16)比例方向控制阀的增益系数 (16)系统的流量增益系数 (16)活塞斜盘倾角传递函数 (16)泵-马达环节的参数整定 (17)对系统稳定性的检测 (18)控制系统的基本要求 (18)系统稳定性检测 (18)本章小结 (19)第3章泵控马达PID控制器设计与仿真 (20)PID控制器的基本原理 (20)四种PID控制器简介 (20)位置式PID控制算法 (20)增量式PID控制算法 (22)抗积分饱和PID控制算法 (23)PID控制器设计 (24)PID控制器参数的整定 (25)PID控制器仿真 (25)关于Simulink的简介 (25)PID控制器的仿真分析 (25)泵控马达速度控制系统的仿真模拟 (27)本章小结 (32)第4章结论与展望 (33)结论 (33)展望 (33)参考文献 (35)致谢 (37)附录 (39)附录A 外文资料翻译 (39)英文 (39)译文 (44)附录B 泵控马达速度控制系统仿真图 (47)第1章绪论课题研究的背景意义随着时代的发展,各种科技也在飞快的发展着,工业自动化水平的高低早已经成为了衡量各个部门现代化水平的标志,而工业自动化必然离不开动力的源泉——马达。
阀控液压马达速度伺服系统仿真分析报告

阀控液压马达速度伺服系统仿真分析引言阀控液压马达速度伺服系统的负载具有较大的惯性和很小的阻尼,其传递函数常可近似由一对实部为零的极点组成,并有很低的动态响应,由于负载处在系统的闭环之中,所以它对阀控液压马达的动态品质有很大的影响。
此外,系统的负载常是可变的,系统设计只能针对一种特定负载,负载一旦改变,系统的动态品质就会变坏,有时甚至失去稳定性,严重的影响了伺服系统的跟踪性能。
本文主要针对干扰力矩对系统的影响,利用结构不变性原理,消除干扰力矩对系统的影响,同时利用PID 控制理论来提高系统的动态性能。
1 阀控液压马达速度伺服系统模型建立阀控液压马达速度伺服系统的结构如图1所示。
液压马达的力矩方程为:fm m s l m T G s C J P +++=θ)(D (1)负载流量方程为:l em m l tm l sP Vs D P C βθ4Q +== (2)伺服阀的线性流量方程为: L p x lP K x k Q -= (3)电液伺服阀近似看成二阶振荡环节:122^2^)()(++=s S K s i s x svsvsv svv ωξω (4) 伺服放大器输出电流ΔI 与输入电压Ue 近似成正比,其传递函数可用伺服放大器增益Ka 表示:但通常的速度控制系统采用积分放大器,对原系统加以校正才能稳定工作。
校正后的积分放大器增益Ka 表示为:测速机速度传感器(测速机)的数学模型为:在上述公式中:v x 为电液伺服阀阀芯位移;i 为电液伺服阀输入电流;v sv k s sv ωξ、、分别为电液伺服阀的增益、阻尼系数和固有频率;m D 为马达排量;L Q 为马达的负载流量;x K 为流量增益系数;p K 为流量一压力系数;只为供油压力;s P 为负载压力;m θ为马达转速;e β为从油液有效体积弹性模数;V 为马达的总容积;J 为折算到马达输出轴上的转动惯量;f T 为外干扰力矩;tm C 为马达泄露系数;m C 为粘性阻尼系数;G 为扭簧梯度。
基于AMESim和Simulink联合仿真的阀控马达转速控制
收稿日期:2019-07-23基于AMESim 和Simulink 联合仿真的阀控马达转速控制毛雨露(长安大学工程机械学院,西安710000)摘要:为了更好地控制阀控马达系统的转速,运用AMESim 和Simulink 软件建立了阀控液压马达系统的数学模型,并进行联合仿真。
同时对液压马达的调速控制采用参数自整定的模糊自适应PID 控制策略来实现。
仿真结果表明,与传统PID 控制相比,在阀控马达调速系统中,模糊自适应PID 控制策略下的系统响应速度更快,超调量小,抗干扰能力更强,有更好的鲁棒性。
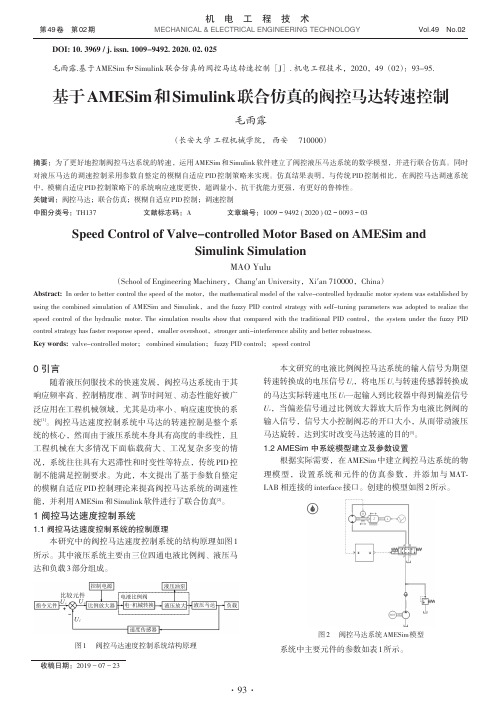
关键词:阀控马达;联合仿真;模糊自适应PID 控制;调速控制中图分类号:TH137文献标志码:A文章编号:1009-9492(2020)02-0093-03Speed Control of Valve-controlled Motor Based on AMESim andSimulink SimulationMAO Yulu(School of Engineering Machinery ,Chang ′an University ,Xi ′an 710000,China )Abstract:In order to better control the speed of the motor ,the mathematical model of the valve-controlled hydraulic motor system was established byusing the combined simulation of AMESim and Simulink ,and the fuzzy PID control strategy with self-tuning parameters was adopted to realize the speed control of the hydraulic motor.The simulation results show that compared with the traditional PID control ,the system under the fuzzy PIDcontrol strategy has faster response speed ,smaller overshoot ,stronger anti-interference ability and better robustness.Key words:valve-controlled motor ;combined simulation ;fuzzy PID control ;speed controlDOI:10.3969/j.issn.1009-9492.2020.02.025第49卷第02期Vol.49No.02机电工程技术MECHANICAL &ELECTRICAL ENGINEERING TECHNOLOGY毛雨露.基于AMESim 和Simulink 联合仿真的阀控马达转速控制[J ].机电工程技术,2020,49(02):93-95.0引言随着液压伺服技术的快速发展,阀控马达系统由于其响应频率高、控制精度准、调节时间短、动态性能好被广泛应用在工程机械领域,尤其是功率小、响应速度快的系统[1]。
液压伺服控制系统的建模与分析

F(t)
( 1 t)
t
(t)
sin wt e t
F(s)
1 s
1 s2 1
s s2 w2 1
s
第3章 液压动力元件
本章摘要
液压动力元件是由液压放大元件和液压执行 元件组成。 有四种基本型式的液压动力元件:阀控液压 缸、阀控液压马达、泵控液压缸、泵控液压马达。 本章将建立几种基本的液压动力元件的传递 函数,分析它们的动态特性和主要性能参数。
由方框图求得液压缸输出位移传递函数:
Xp
mtVt
4e Ap2
s3
Kq Ap
Xv
Kce Ap2
1
Vt
4 e K ce
s FL
mt Kce Ap2
BpVt
4e Ap2
s2
1
Bp Kce Ap2
KVt
4e Ap2
s
KKce Ap2
式中,Kce为总的流量系数,Kce=Kc+Ktc
Khmin 4 A 2 P e / Vt
2、液压谐振频率的概念 设活塞及负载在总质量是m,在没有阻尼的情 况下,由于存在两种储能元件(弹性和质 量),位能和动能反复转换,系统出现谐振, 无阻尼谐振频率为:
Wh Kh / m Ap2e (1/V10 V20 ) / m
当V10 V20时
Wh 4 Ap2eVt / m
s
s2
h2
2 h h
s
1
s FL
液压固有频率: 液压阻尼比:
h
4e Ap2
mtVt
h
Kce Ap
emt Bp
Vt 4 Ap
Vt
emt
忽略Bp后近似为:
阀控马达轮边驱动系统仿真分析

阀控马达轮边驱动系统仿真分析杨霞;白雪银;张伟【摘要】以单泵双马达阀控速度闭环控制系统作为工程车辆的轮边驱动单元为研究背景,分析了车辆调速与转向控制原理,提出了应用负反馈闭环控制技术调整发动机转速的节能思路,并进行了AMESim仿真分析.结果表明:该系统能够实现两个驱动轮转速的独立控制,对复杂路面工况具有较强的自适应性,能够实时调整发动机转速,减少溢流,具有显著的节能效果.【期刊名称】《液压与气动》【年(卷),期】2015(000)002【总页数】4页(P62-65)【关键词】轮边驱动;阀控马达;调速;节能;AMESim【作者】杨霞;白雪银;张伟【作者单位】内蒙古化工职业学院测控与机电工程系,内蒙古呼和浩特010070;内蒙古化工职业学院测控与机电工程系,内蒙古呼和浩特010070;秦皇岛港股份有限公司,河北秦皇岛066002【正文语种】中文【中图分类】TH137引言目前,随着液压技术的不断创新发展,以液压马达为驱动单元的轮边驱动形式在工程车辆领域得到了广泛应用[1-3]。
其基本形式为发动机-量泵-变量马达-驱动轮,它通过改变泵的排量实现车速控制,改变马达排量以调节驱动轮输出转矩,应用液压缸转向机构改变车辆行进方向。
该传动形式有效利用了恒压系统下各并联元件可以互不干涉独立工作的特性,实现了驱动轮转速、转矩和转向的独立控制,而且采用泵控马达闭式系统,节能效果显著[4-6],但存在动态调节响应慢、系统成本高等缺陷。
本研究提出了一种发动机-定量泵-比例阀-定量马达-驱动轮的传动形式,该系统充分发挥了阀控系统响应快的特点,有效地改善了车辆操作性能,而且降低了成本。
1 原理分析和仿真模型搭建工程车辆阀控马达行走系统基本原理如图1所示。
用两套独立的比例阀控定量马达速度闭环控制系统分别驱动左右两个车轮,通过调节比例阀开口大小来改变进入定量马达的流量,进而改变驱动轮的转速,以实现车辆的速度控制。
引入转向控制系数,将其与速度控制信号作乘除运算后,分别作为两套阀控马达系统的输入信号,进而使得两个驱动轮的输出转速成比例关系,当左轮转速大于右轮转速,车辆即实现右转,当左轮转速小于右轮转速,车辆即实现左转。
液压马达速度伺服系统研究_马俊功

( 1) 泵控液压马达速度伺服系统 泵控液压 马达速度 伺服 系 统是 由变 量泵 和 定量 马
达组成的传动 装置。这 种系 统 的工 作原 理是 通 过改 变
变量泵的斜盘倾角来控制供给液压马达的流量, 从而 调节液压马达 的转速 。按其 结 构形 式和 控制 指 令给 定
方式可分开环泵控液压马达速度伺服系统 ( 图 1) 、带 位置环的闭环泵控液压马达速度伺服系统 ( 图 2) 和 不带位置环的闭环泵控液压马达速度伺服系统 ( 图 3) 三种。
馈, 系统受负载和温度的影响大, 如当压力从无负载 变化到额定负载时, 系统流量变化大约 8% ~ 12% , 故精度很低 。只适用于要 求不高的场 合。
为了改善精度, 可以采用压力反馈补偿, 用压力 传感器检测负载压力, 作为第二指令输入变量泵伺服 机构, 使变量泵的流量随负载压力的升高而增加, 以 此来补偿变量 泵驱动 电机 转差 和泄 漏所 造 成的 流量 减 少。由于这个压力反馈是正反馈, 因此有可能造成稳
# 100 #
的影响。提高补油压力, 可以提高系统的响应速度。 该系统适 于解决大 功率 系 统高 效与 快速 调 节的 问
题, 特别对有些系统重点要求在阶跃负载作用时的动 态调节性能时, 可采用此系统。
图 6 补油式并联阀控液压马达速度伺服系统
( 3) 阀泵联合控制液压马达速度伺服系统 对于大功率速度伺服系统, 传统的阀控形式无法 解决溢流损失造成的系统温升高、散热难的问题, 因 此必须采用效 率较高 的容 积控 制系 统以 解决 发 热量 大 的问题, 但容积控制系统虽然效率较高, 可动态性能 较差, 不适于高精度的场合。因此研究一种动态性能 好、精度高、适 于大功 率场 合 的液 压马 达速 度 伺服 系 统成为必要 。该类系统 按其 结 构形 式和 控制 方 式的 不 同分为以下两种类型: 阀泵串联控制液压马达速度调 节系统 ( 图 7 和图 8) , 阀泵并联控制液压马达速度调 节系统 ( 图 9) 。 ¹ 阀泵串联控制液压马达速度调节系统 这种系统 的结构是 在伺 服 变量 泵和 液压 马 达之 间 再用一个电液伺服阀来控制泵的输出流量, 其工作原 理与具体系统构成有关。图 7 为用同一指令同时控制 伺服阀和油泵 的系统 形式 。系 统用 同一 误差 信 号来 控 制伺服阀的开度和变量泵的斜盘倾角, 因斜盘倾角的 变化速度低于伺服阀开口的变化速度, 故用一个给定 信号 C来保证液压泵时刻都有一个固定输出 Q 0。这个 Q 0 应足以满足执行机构瞬时加速度和速度的要求, 即 Q 0 要足够大; 另一方面, 当负载需求量较小时, Q 0 的大 部分将以溢流阀调定的压力流回油箱, 造成能量的无用 损耗, 并引起系统温度的升高, 故要求 Q0 尽量小。因此 C的选择 是本系统设 计的关键之 一。C的 选择 要视具 体 指标而定, 如执行机构初始速度的要求, 系统长期工作 温升的要求等 。 阀泵串联控制的另一种形式如图 8 所示。系统的 工作原理为: 变量泵斜盘变量机构的控制信号取自能 源压力和负载压力之差, 使能源压力跟随负载压力的 变化, 这样可以消除恒压油源的溢流损失, 并减少压 力油通过伺服 阀的节 流损 失以 及系 统和 液压 泵 的泄 漏 损失。液压泵 也必须有 一个 高 于负 载压 力的 设 计信 号 $, 当泵出口压力高于负载压力时, 经比较后得到的差
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阀控液压马达速度伺服系统仿真分析
引言
阀控液压马达速度伺服系统的负载具有较大的惯性和很小的阻尼,其传递函数常可近似由一对实部为零的极点组成,并有很低的动态响应,由于负载处在系统的闭环之中,所以它对阀控液压马达的动态品质有很大的影响。
此外,系统的负载常是可变的,系统设计只能针对一种特定负载,负载一旦改变,系统的动态品质就会变坏,有时甚至失去稳定性,严重的影响了伺服系统的跟踪性能。
本文主要针对干扰力矩对系统的影响,利用结构不变性原理,消除干扰力矩对系统的影响,同时利用PID 控制理论来提高系统的动态性能。
1 阀控液压马达速度伺服系统模型建立
阀控液压马达速度伺服系统的结构如图1所示。
液压马达的力矩方程为:
f
m m s l m T G s C J P +++=θ)(D (1)
负载流量方程为:
l e
m m l tm l sP V
s D P C βθ4Q +== (2)
伺服阀的线性流量方程为:
L p x l P K x k Q -= (3)
电液伺服阀近似看成二阶振荡环节:
1
22^2^)()(++=
s S K s i s x sv
sv
sv sv
v ωξω (4) 伺服放大器输出电流ΔI 与输入电压Ue 近似成正比,其传递函数可用伺服放大器增益Ka 表示:
错误!未找到引用源。
但通常的速度控制系统采用积分放大器,对原系统加以校正才能稳定工作。
校正后的积分放大器增益Ka 表示为:
测速机速度传感器(测速机)的数学模型为:
错误!未找到引用源。
在上述公式中:v x 为电液伺服阀阀芯位移;i 为电液伺服阀输入电流;v sv k s sv ωξ、、分别为电液伺服阀的增益、阻尼系数和固有频率;m D 为马达排量;L Q 为马达的负载流量;
x K 为流量增益系数;p K 为流量一压力系数;只为供油压力;s P 为负
载压力;m θ为马达转速;e β为从油液有效体积弹性模数;V 为马达的总容积;J 为折算到马达输出轴上的转动惯量;f T 为外干扰力矩;
tm C 为马达泄露系数;m C 为粘性阻尼系数;G 为扭簧梯度。
Ue 为积分
放大器额定电压,;Ka为积分放大器增益。
错误!未找到引用源。
为传感器电压;错误!未找到引用源。
为速度传感器增益。
2 电液速度控制系统原理
首先给出阀控液压马达速度控制系统的实际物理模型:
如图所示,该系统由伺服放大器、电液伺服阀、液压马达、测速电动机等组成。
测速电机轴与负载机轴相联,用于检测负载轴的速度,检测到的速度信号与指令信号差(误差信号)经伺服放大器进行功率放大,产生的电流用来控制电液伺服阀的阀芯位置,电液伺服阀输出压力油驱动液压马达及负载旋转。
根据所建立的物理模型,可以建立相对应的闭环控制系统原理的方框图:
仿真系统动态方块图
根据所给出的系统原理方框图以及所求得的各环节数学模型,可以得出仿真系统经过积分环节校正后的系统动态方块图如下:
3 问题描述
现有一阀控液压伺服速度控制系统,其原理图如图1,考虑伺服阀的动态,伺服参数为:错误!未找到引用源。
=3060e-6,错误!未找到引用源。
=600,错误!未找到引用源。
=0.5,液压缸的参数为错误!未找到引用源。
=1.25e6,错误!未找到引用源。
=388,错误!未找到引用源。
=0.94,放大器增益错误!未找到引用源。
=0.05,试用simulink对该系统进行动态分析,并比较校正前后系统稳定性,分析校正前后的变化。
4 解题步骤
(1)根据给定的参数,利用simulink对该系统进行未加积分环节校正的系统建模,如下图所示:
未校正系统的simulink模型
(2)绘制未校正系统的伯德图。
Matlab程序如下:
clear all;clc;
Wsv=600;zuni1=0.5;Ksv=3060e-6;Ka=0.05;i=3;Kf=0.175;
Wh=388;zuni2=0.94;Kh=1.25e6;
sys=tf(Ka*Ksv*i*Kf*Kh,conv([1/Wsv^2 2*zuni1/Wsv 1],[1/Wh^2 2*zuni2/Wh 1]));
Figure;margin(sys);
grid;
分析bode图:
从图可看出系统的稳定裕量(Gm=-32.6dB,Pm=-128°)为负,可以断定其闭环系统是不稳定的。
及时K0值调很低,对数幅频特性曲线也是以-80dB/dec或-40dB/dec的斜率穿过零分贝线,系统的相位裕量和幅值裕量都趋于负值,使系统不稳定。
为了使系统有一定的稳定裕度量,必须加校正环节。
在速度控制系统中,可以用运算放大器组成积分放大器代替原来的放大器。
积分放大器如下图所示:
C
R
积分放大器
其传递函数为:
其中,Ka=0.05。
加了校正之后的系统仿真方框图如下:
校正后速度控制系统的仿真框图
矫正后的MATLAB程序:
clear all;clc;
Wsv=600;zuni1=0.5;Ksv=3060e-6;Ka=0.05;i=3;Kf=0.175;
Wh=388;zuni2=0.94;Kh=1.25e6;
sys=tf(Ka*Ksv*Kh,conv([1/Wsv^2 2*zuni1/Wsv 1 0],[1/Wh^2 2*zuni2/Wh 1]));
figure;margin(sys);
grid;
从伯德图看出校正后的系统穿越频率下降到247 rad/s,Gm=4.09dB,Pm=26.7deg,可看出系统有正的相角裕度,因而该系统闭环是稳定的。
阀控液压马达速度伺服系统仿真分析
专业:机械设计制造及其自动化
班级:(2)班
姓名:王仲凯
学号:120312005
指导老师:董甲东。