运动副间隙对机构运动特性的影响分析
运动副间隙对卫星天线双轴机构动态特性影响

尚未见 文献 对 含间 隙卫 星天线 双轴 机构 指 向精度 动态 指 向精度 要 求 的卫 星天 线 双 轴 驱 动 机构 为 研 究 对 象 ,分析 运 动 副 间 隙及 其 大
( 尔 滨 工 业 大 学 航 天 学 院 , 哈尔 滨 10 0 ) 哈 5 0 1
摘要 卫 星 天线指 向精 度要 求 高 ,天 线 驱动 机 构 中有 运 动 副的 存在 就 不 可避 免 地含 有 间隙 ,研 究 间隙等 非线 性 因素对 卫 星天线 驱 动机 构 动 态特 性 影 响 尤 为重要 。以 某型 卫 星 天 线双轴 驱 动机构 为研 究对 象 ,基 于虚拟 样机 技 术 ,采 用非 线性 弹 簧 阻尼 模 型 建立 了间 隙处 的接 触碰撞 模 型 , 同时采 用库 伦摩擦 模 型考 虑 运 动 副 间 隙处 的摩 擦 作 用 。通过 对 虚拟 样 机
21 0 2年 1 0月 第 5 期
中 国 空 间 科 学 技 术
Ch ne e Sp c inc n c o o i s a e Sce e a d Te hn l gy
21
运 动 副 间 隙对 卫 星天 线 双 轴 机 构 动 态特 性 影 响
潘冬 王 兴贵 赵阳
进 行动 力 学仿真 ,分析研 究 了运动 副 间 隙及 其 大 小、不 同驱动 力 矩 等 因素 对 双轴 驱动 机 构 动 态特 性 的影响规 律 。结 果表 明 :间 隙及 过 大 的驱 动力 矩将 使 天 线 定位 精度 降低 、稳 定 性
变差 。综合 考虑 各 因素影 响 ,对卫 星天 线 系统 进行 结构 优化 ,是 提 高天 线定 位精 度 的 有 效
机构的结构分析(运动副)
凸轮机构
总结词
凸轮机构是一种通过凸轮和从动件相互作用实现运动的机构,常用于实现间歇性或周期 性的运动。
机构的结构分析(运动副)
• 引言 • 机构的基本类型 • 运动副的分类 • 运动副的特性分析 • 运动副在机构中的应用实例 • 结论
01
引言
主题简介
01
机构的结构分析是机械工程中的 重要概念,主要研究机构中各个 构件之间的连接关系和运动传递 方式。
02
运动副是机构中实现运动传递的 关键部分,通过运动副的组合和 配合,机构可以实现预定的运动 轨迹和功能。
机构与运动副的关系
机构是由多个构件组成的,构件之间 的连接和配合通过运动副来实现。
运动副的种类和特性决定了机构的运 动特性和功能,因此,对运动副的分 析和研究是机构结构分析中的重要环 节。
02
机构的基本类型
连杆机构
总结词
连杆机构是一种通过连接杆件实现运动的机构,广泛应用于各种机械和设备中。
详细描述
运动副优化设计
进一步深入研究运动副的优化设计方 法,以提高机构的整体性能和效率, 例如通过有限元分析、多学科优化等 方法对运动副进行优化。
跨学科合作与交叉融合
加强不同学科领域之间的合作与交叉 融合,例如机械工程、材料科学、控 制工程等,以推动机构结构分析领域 的创新发展。
THANKS
感谢观看
刚度与阻尼
运动副的刚度和阻尼会影响机 构的动态性能。
效率与精度
第5章 平面连杆机构的运动分析
( xBi x A ) 2 ( y Bi y A ) 2 ( xB1 x A ) 2 ( y B1 y A ) 2 ( xCi xD ) 2 ( yCi y D ) 2 ( xC1 xD ) 2 ( yC1 y D ) 2 i 2,3
(a12 cos12 b12 sin 12 x A cos12 y A sin 12 x A ) x B1 (b12 cos12 a12 sin 12 x A sin 12 y A cos12 y A ) y B1 1 2 2 a12 x A b12 y A (a12 b12 ) 2 (a13 cos13 b13 sin 13 x A cos13 y A sin 13 x A ) x B1 (b13 cos13 a13 sin 13 x A sin 13 y A cos13 y A ) y B1 1 2 2 a13 x A b13 y A (a13 b13 ) 2
cos 1i D1i sin 1i 0
xBi xB1 y D y 1i B1 Bi 1 1
xCi xC1 y D y 1i C1 Ci 1 1
Qi Pi Bi
Q1
i P1
B1
1
Ci
C1
A
D
铰链四杆机构实现连杆的三个精确位置P1Q1,,
P2Q2,P3Q3 的设计图解方法
实现三个位置
机构不能可靠到位
曲柄摇杆机构
机构不能顺序到位
5.6.2 平面连杆机构运动设计的位移矩阵法
1.刚体运动位移矩阵 刚体运动→矢量运动
含间隙的机构动力学研究进展

来的研 究状况等方 面对含 间隙的机构动力学进行 了综述, 总结 了含 间隙机构动力 学的发展 现 状 , 出 了今后研 究 中应 注 意 的问题 。 指
[ 关 键 词 ] 间隙 ; 机 构 ; 动 力学 [ 文献标 识 码 ] A [ 图分 类号 ] T . 中 H124 1
2 研 究状 况
2 1 建模 方法 .
含 问隙机构 的动 力 学建模 方 法 要 分 为 3类 : 1 基 于 “ () 接触一 分离 ” 型 和牛 顿 法 ;2 模 ( )基 于 “ 分 离一碰撞一 接触 ” 型和 动量定 理 ;3 基 于 “ 续接触 ” 型 和拉 格 朗 日方程 法 。 模 () 连 模 2 1 1 基于“ .. 接触一 分 离” 型和 牛顿 法 的模型 模
维普资讯
第 3期
何 勇, 冬 李
含间隙的机构 动力学研 究进 展
定 的状态 再对 相J 态 卜 系统 的 动 力学方 程进 行 积分 , l在每 一 步 长 的数 他 积 分 中都 要重 复 以 L 状 的 并 _ 1 作 。 为考 虑 了接 触状 念 与分 离状 态 的交 替连 续 变化 , 以很 难 确 定 两 者 过 渡 时 机 构 的 各项运 动 参 所 数, 特别是 多 问隙幸 合 的情 况 , 求得 稳 态解 。对 连杆 机构 , f 玛 难 所得 到 的 运 动 方 程 是 二 阶 强 非 线性 微 分 方 程组 。 以 S uo sy】 为代表 的…批 学者 , 虑 r运 动 剐 元 素 接触 表 面 的 弹 性 变形 , .D bw k l 考 以牛顿 力学 为 基础 , 建 r系统 的运 动方 程 , 含 间隙 机构 动力学 进 行定 量 的分 析 , 出 了一・ 冲击 副 、 对 提 维 一维 冲击 丰 、 F
间隙铰链对平面机构碰撞动力学特性影响分析
间隙铰链对平面机构碰撞动力学特性影响分析王旭鹏;刘更;马尚君;佟瑞庭;薛艳敏【摘要】Here,the effects of clearance joint on impact dynamic characteristics of planar mechanisms were studied.At first,a line-contact impact joint model with axial sizes was established.Based on an improved nonlinear normal impact force model and a modified tangential Coulomb friction force model,the effect laws of clearances on impact dynamic characteristics of a planar slider-crank mechanism were studied through analyzing slider acceleration,clearance joint's contact force,acceleration frequency spectra and velocity-acceleration phase diagram under different clearances.The results showed that the larger the clearance,the bigger the oscillation amplitude of the mechanism's dynamic characteristics,and the lower the oscillation frequency;the larger the clearance,the more nonlinear the mechanism's dynamic characteristics.%为了研究间隙铰链对机构动态性能的影响,建立了一种含轴向尺寸的线接触碰撞铰模型,在此基础上提出一种改进的非线性法向碰撞力模型和修正的切向库伦摩擦力模型,以平面含间隙铰链曲柄滑块机构为研究对象,通过不同间隙值下的滑块加速度、间隙铰链处接触力、加速度频谱以及速度-加速度相图分析,研究了间隙值对机构碰撞动力学特性的影响规律.研究结果表明:间隙会导致机构动态性能出现明显的振荡现象,且随着间隙值的增大,振荡加剧、振荡幅值上升,但振荡频率降低;同时,在间隙铰链的影响下,机构动态特性呈现出非线性现象,且间隙越大,非线性现象越明显.【期刊名称】《振动与冲击》【年(卷),期】2017(036)017【总页数】5页(P74-78)【关键词】非线性碰撞力模型;间隙铰链;碰撞动力学【作者】王旭鹏;刘更;马尚君;佟瑞庭;薛艳敏【作者单位】西安理工大学艺术与设计学院工业设计系,西安710054;西北工业大学陕西省机电传动与控制工程实验室,西安710072;西北工业大学陕西省机电传动与控制工程实验室,西安710072;西北工业大学陕西省机电传动与控制工程实验室,西安710072;西安理工大学艺术与设计学院工业设计系,西安710054【正文语种】中文【中图分类】TH112机构运动中相邻构件间铰链连接处通常设计有合理的间隙。
四杆机构的设计步骤和方法
温馨小提示:本文主要介绍的是关于四杆机构的设计步骤和方法的文章,文章是由本店铺通过查阅资料,经过精心整理撰写而成。
文章的内容不一定符合大家的期望需求,还请各位根据自己的需求进行下载。
本文档下载后可以根据自己的实际情况进行任意改写,从而已达到各位的需求。
愿本篇四杆机构的设计步骤和方法能真实确切的帮助各位。
本店铺将会继续努力、改进、创新,给大家提供更加优质符合大家需求的文档。
感谢支持!(Thank you for downloading and checking it out!)阅读本篇文章之前,本店铺提供大纲预览服务,我们可以先预览文章的大纲部分,快速了解本篇的主体内容,然后根据您的需求进行文档的查看与下载。
四杆机构的设计步骤和方法(大纲)一、四杆机构概述1.1四杆机构简介1.2四杆机构的应用领域二、四杆机构设计步骤2.1确定设计目标2.2分析四杆机构类型2.3确定机构参数2.4选择合适的材料2.5计算运动与动力参数2.6进行仿真分析与优化三、四杆机构设计方法3.1几何法3.1.1尺度法3.1.2位置法3.2解析法3.2.1矩阵法3.2.2微分方程法3.3计算机辅助设计方法3.3.1CAD软件3.3.2仿真软件四、四杆机构设计实例4.1曲柄摇杆机构设计实例4.2双曲柄机构设计实例4.3双摇杆机构设计实例五、四杆机构设计注意事项5.1运动副间隙的考虑5.2刚度与强度的校核5.3疲劳寿命分析5.4安全系数的选择六、四杆机构设计总结与展望6.1设计成果总结6.2存在问题与改进方向6.3未来发展趋势与应用前景一、四杆机构概述以下是对四杆机构设计步骤和方法中的四杆机构概述部分的撰写:1.1 四杆机构简介四杆机构是由四个杆件组成的机械系统,它们通过关节连接在一起。
这四个杆件分别是:曲柄、连杆、摇杆和机架。
四杆机构根据其结构特点和运动特性,可以分为多种类型,如直动四杆机构、摆动四杆机构、转动四杆机构等。
四杆机构在工程应用中具有广泛的应用前景,其设计和研究在机械工程领域具有重要意义。
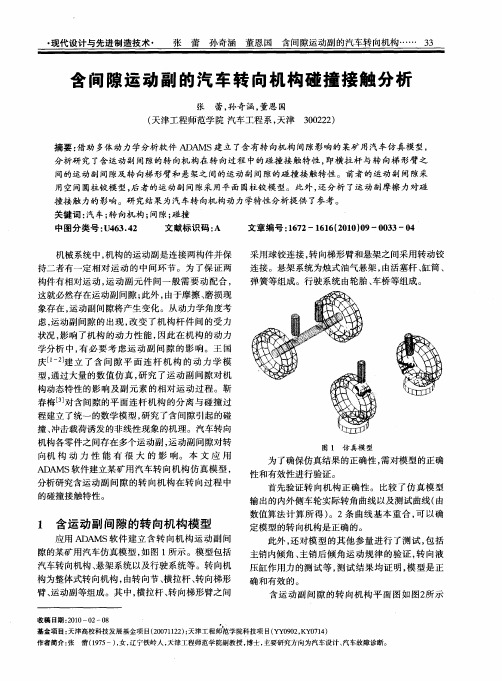
含间隙运动副的汽车转向机构碰撞接触分析
压缸作用力的测试等 , 测试结果均证 明, 模型是正
确 和有效 的。
含 运 动 副 间 隙 的转 向机 构 平 面 图如 图2 示 所
基 项目 天 高 科技 展基 项目20 1 ) 津 程 话 科 项目 Y 0 2 Y7 ) 金 : 津 校 发 金 ( ¨l 2; 工 学院 技 (Y9 , 0 4 O 2 天 7 0 K 1
摘要: 借助 多体动力学分析软件 A A D MS建立 了含有转 向机构 间隙影响的某矿 用汽车仿真模型, 分析研 究 了含运 动 副 间隙的转 向机 构在 转 向过 程 中的碰 撞 接 触 特 性 , 即横 拉 杆 与 转 向梯 形 臂 之
间的运 动 副间 隙及转 向梯 形臂 和 悬架之 间的运动 副 间 隙的碰 撞 接 触特 性 。前 者 的运 动 副 间 隙采 用空 间 圆柱铰 模 型 , 者 的运 动副 间 隙采 用平 面 圆柱 铰模 型。此 外 , 分析 了运 动 副摩 擦 力对碰 后 还 撞接 触 力 的影响 。研 究结 果 为汽 车转 向机 构 动 力学特 性分 析提 供 了参考 。
关 键词 : 车 ; 向机 构 ; 隙 ; 撞 汽 转 间 碰
中图分 类号 : 6 .2 U4 3 4
文献标 识码 : A
文章 编号 :6 2—1 1 (0 0 0 —0 3 17 6 6 2 1 )9 0 3—0 4
机械系统 中, 机构的运动副是连接两构件并保
持二 者有一 定 相 对 运 动 的 中 间环 节 。 为 了保 证 两
构动态特性 的影响及 副元素 的相对运动过程 。靳 春梅 [对 含 间隙 的平 面 连 杆 机 构 的分 离 与碰 撞 过 3 ]
程建 立 了统 一 的数学 模 型 , 究 了含 间隙 引起 的碰 研
多间隙运动副四杆机构运动特性研究

第2期2021年2月机械设计与制造Machinery Design&Manufacture117多间隙运动副四杆机构运动特性研究彭京徽,周奇郑,孙强,王强(海军工程大学兵器工程学院,湖北武汉430033)摘要:运动副存在间隙会造成机构精确度的降低,为了研究运动副间隙对机构运动可靠性的影响,以含间隙转动副的平行双曲柄四杆机构为研究对象。
根据运动副对目标构件的作用特性定义了运动副的性质,利用ADAMS研究了间隙运动副对机构不同目标构件运动特性的影响。
结果表明:二级驱动间隙副比一级驱动间隙副对目标杆DI运动特性的影响更明显,但杆皿长度增加会减弱二级驱动间隙副的影响;另外,驱动间隙副比约束间隙副对目标杆H的速度影响更大。
关键词:多间隙运动副;四杆机构;动态特性;ADAMS;碰撞中图分类号:TH16;TH113文献标识码:A文章编号:1001-3997(2021)02-0117-04Study of Motion Characteristics of Four-Bar Mechanism with Multi-Clearance Joints PENG Jing-hui,ZHOU Qi-zheng,SUN Qiang,WANG Qiang(College of Weaponry Engineering,Naval University of Engineering,Hubei Wuhan430033,China)Abstract accuracy of mechanism will reduce by motion pair with clearance,in order to study the effect of the clearance ofjoint on motion reliability of t he mechanism,take parallel double crank four—bar mechanism with clearance as the research object.Defined the character ofjoints based the effect of the joints on the target component,and studied the clearance joints influence on the dynamic characteristics different target component of the mechanism by ADAMS.77ie results show that the secondary drive clearance joint has more significant effect on the motion characteristics of the target bar3than the primary drive clearance joint,but the effect of the secondary drive clearance joint will reduce with increasing of the length of bar3. Moreover,drive clearance joint has more irifluence on the velocity of t arget bar2than the constraint clearance joint.Key Words:Multi-Clearance Joints;Foui^-Bar Mechanism;Dynamic Characteristic;ADAMS;Collide1引言随着现代制造工业对机械运动精度提出越来越高的要求,精确预测机械系统的运动是机械设计的重要内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运动副间隙对机构运动特性的影响分析 引言由于装配、制造误差和磨损,运动副中的间隙是不可避免的[1],间隙使实际机构与理想机构的运动发生偏离,降低了机构运动精度,而且容易引起冲击动载荷,同时产生振动和噪声,影响系统载荷传递,以及造成运动副的破坏和失效,这对机构的效率和寿命都有影响[2]。
所以,含间隙机构动力学已经成为目前国内外工程界迫切要解决的关键问题。
当前对运动副模型的建立分为三类[3]:(1)连续接触模型:由于运动副元素间分离、碰撞的时间特别短,可假定运动副始终处于连续接触状态;(2) 二状态运动模型:只考虑运动副接触和自由两种状态,加入运动副元素接触表面弹性和阻尼;(3) 三状态模型:考虑运动副元素接触、分离和碰撞三种状态。
连续接触模型较简单,较难反映副元素间动力学特性;三状态模型较复杂,且不能求解接触碰撞力; 二状态模型在模型精确性或求解难度均符合实际需要,在二状态模型基础上逐渐发展成为碰撞铰模型。
本文基于间隙矢量模型,考虑构件制造、装配误差建立平面连杆传动机构含间隙球副的碰撞铰模型,并用非线性弹簧阻尼模型描述运动副元素法向接触力与位移关系,用修正的库伦摩擦模型描述运动副元素切向摩擦力与位移关系,建立该传动机构动力学模型,并嵌入LMS 软件,分析运动副间隙对该传动机构动力学特性的影响。
1 含间隙机构动力学建模运动副铰间间隙会引起相连两体的内碰撞,在机构运行期间,运动副包含有间隙,体与体之间的连接产生了松动,运动副关节元素存在失去接触的现象,进入到自由运动状态,待再接触时会产生碰撞,因此间隙总是要包含着一定的接触和碰撞过程。
含间隙机械系统动力学建模的关键是如何把间隙模型嵌入到系统的动力学模型中,这需要考虑间隙运动副的真实描述和间隙接触碰撞过程的正确描述。
1.1 运动副间隙矢量模型间隙矢量模型通过在平面球铰中引入一个间隙矢量来表达。
在该模型中,间隙矢量代表了球铰所连接的两相邻构件连接点的精确的相对位置,可以有效处理间隙运动副连接点相对位置的变化。
间隙矢量[4]以轴套的回转中心为基准起始点,方向指向轴和轴套相对运动时的潜在接触点,该潜在接触点构成了轴与轴套的相对碰撞点。
间隙矢量的大小被严格限制在以轴套回转中心为圆心且以轴和轴套的径向尺寸公差为半径的间隙圆内,因此间隙矢量大小的变化能够反映构件的加工误差,并且矢量大小的变化能够反映间隙运动副元素是否接触。
对含间隙球铰,间隙大小用轴承与轴半径之差来描述,则间隙为: i j c R R =- (1)其中i R 为轴套半径,j R 为轴半径。
轴套与轴中心距为e ,定义δ=e-c 为接触点法向穿透深度。
则可以定义碰撞接触条件为[5]:δ<0 未接触;δ=0 开始接触或开始分离;δ>0 接触变形穿透深度。
1.2 含运动副间隙的机构动力学模型平面连杆机构含间隙的运动副处两零件没有接触时,其动力学方程可表示为[6]..(,)0T q M q Kq Q q t ϕλϕ⎧⎪++=⎨⎪=⎩ (2) 式中,M 和K 分别为连杆机构系统的广义质量矩阵、广义刚度矩阵;q 为系统位置向量;ϕ和q ϕ分别为约束方程、约束方程的雅可比矩阵;λ为拉格朗日乘子;Q 为广义力矩阵。
当含间隙的运动副处两零件有接触时,将引起约束条件的变化,增加力约束,机构的动力学方程可表示[7]..'(,)0T q M q Kq Q F q t ϕλϕ⎧⎪++=+⎨⎪=⎩ (3)式中,'F 为接触力。
在LMS 中,零件间接触力用Contact 工具来定义。
Contact 对碰撞力的计算采用Restitution 类型,即等效弹簧阻尼模型[8]。
它将接触模型简化成一个弹簧阻尼系统。
弹簧接触力根据Hertz 接触理论来计算,同时,用阻尼器模拟接触过程中的能量损失[9]。
用等效弹簧阻尼模型来计算接触碰撞力,其法向接触力广义形式为[10]..()n m n n F K D K C δδδδδ=+=+ (4)式中,n F 是接触点处的法向接触力;n K 也是等效接触刚度;δ是接触点法向穿透深度;.δ是接触点处法向相对速度;()C δ是与δ有关的阻尼因子,m 为非线性弹性力幂指数。
系数D 为碰撞过程的阻尼系数, D 的表达式为2().3(1)4n e K c D δδ--=(5)其中,e c 为恢复系数;().δ-为撞击点的初始相对速度。
运动副间隙切向接触特性可以通过切向摩擦力模型来描述,本文考虑运动副间隙摩擦为干摩擦,不考虑润滑。
由于铰间摩擦力的存在,铰结构的相对运动将受到铰间摩擦阻力矩的影响并会进一步影响到整个间隙机构的动力学响应。
铰间隙碰撞接触处的切向摩擦力模型采用修正的库仑摩擦定律,其切向摩擦力可以表示为[11]t t f d nv F c F v τμ=- (6) 式中,f μ为动摩擦因数,d c 为动态修正系数;t v 为相对切线速度。
2 含运动副间隙的平面连杆机构仿真分析2.1 含运动副间隙的平面连杆机构多体动力学模型的建立平面连杆机构,如图1所示。
在LMS 中,铰A 、D 处两杆均通过固定副Braket Joint 固接于地面,两摇杆通过旋转副Revolute Joint 与固定在地面上的杆连接,摇杆和连杆通过铰B 、C 连接。
当B 、C 铰无间隙时,施加理想球副Spherical Joint 连接两构件,当有间隙存在时,通过施加球与球套之间的接触力Contact 来模拟由间隙存在产生的碰撞力。
由于间隙通常很小,为了表达清楚,间隙放大,如图2所示。
假设球副外壳为铜,弹性模量E 117Gpa =,泊松比为0.30,密度为338.910kg/m ⨯;内球为钢,弹性模量E 200Gpa =,泊松比为0.29,密度为337.8510kg/m ⨯。
二者相对运动速度为50mm/s 。
设置各零件的材料属性和初始状态,最后,在旋转副A 处施加驱动.以建立起平面连杆机构的动力学模型。
以下对间隙运动副的不同因素对机构运动的影响进行分析。
图1 平面连杆机构几何模型图2 球副放大示意图2.2 间隙大小对机构运动的影响为了研究间隙大小对机构运动特性的影响,间隙半径分别取1mm 、0.1mm 与无间隙状态下情况进行对比。
研究发现,当间隙较小时,含间隙时随动杆的位移与理想球副不含间隙时的位移曲线几乎完全重合,速度围绕理想无间隙速度出现小的波动,但整体趋势相同,这表明较小间隙状态下,间隙对机构的位移、速度影响较小。
此结论与文献3~5中得到的结论相同。
但随着间隙的增大,位移峰值稍微增大一些,在碰撞后位移呈振荡状态慢慢下降;而速度出现较大差异,在碰撞后速度出现高频振荡特点,并且远大于前两种状态下的速度。
但是对于加速度两者有较大差别,理想机构加速度曲线很光滑,加速度值也很小。
但考虑铰间间隙时,加速度出现明显的波动,存在许多峰值,并且幅值比理想机构增大很多,可知铰间间隙对随动杆的加速度有较大的影响。
并且加速度峰值随着间隙的增大出现明显的滞后效应,加速度在运动起始阶段会呈现强烈的冲击效应,具有较高的瞬时峰值。
间隙较小的加速度峰值出现较早一些,但峰值却较大一些。
由分析可知,由于球与球套之间存在间隙,因此产生了间隙碰撞力,是一种局部效应,每次碰撞时间极短,因此对位移影响不大,但对加速度影响较明显。
由于理想机构球铰没有间隙,所以,碰撞力曲线很光滑,且值数量级很小,接近于零。
图3为间隙为0.1mm和1mm状态下,球铰碰撞力曲线对比图。
点划线为间隙为0.1mm状态,小碎点线为间隙为1mm状态。
图3 不同间隙状态下球铰碰撞力曲线图从图中可以看出,由于间隙的存在,产生了脉冲式的间隙碰撞力,碰撞力幅值较大并且体现出高频振荡的特点。
随着间隙的增大,碰撞的频率变低.这是因为间隙变大时,铰接的两零件的碰撞间隔加长。
2.3 不同运动副参数对机构运动的影响实际使用的运动副材料多种多样,材料特性也相差较大。
图4为当球副间隙为1mm,二者相对运动速度为50mm/s时,钢球钢套与钢球铜套球副的碰撞力对比图,点划线为钢球钢套材料的球副碰撞力,实线为钢球铜套材料的球副碰撞力。
图4 不同运动副材料时球副的碰撞力对比图从图中可以看出,材料弹性模量较大的钢球钢套运动副和弹性模量较小的钢球铜套运动副中的碰撞有所不同,弹性模量较大时,运动副变形较小,碰撞力也较小;弹性模量较小时,运动副元素变形较大,碰撞力也较大,碰撞刚度明显降低。
3.4 碰撞速度对机构运动的影响不同的碰撞速度造成构件的变形不同,碰撞过程也会有所不同。
图5为当球副间隙为1mm时,二者相对运动速度分别为50mm/s和500mm/s时,球副的碰撞力对比图,点划线为速度为500m/s的球副碰撞力,实线为速度为50m/s的球副碰撞力。
图5 不同碰撞速度时球副的碰撞力对比图从图中可以看出,随着速度的增大,碰撞力急剧增大,碰撞时间缩短,此时造成的碰撞变形也增大,碰撞刚度也迅速增大。
3.5 多间隙与单间隙对机构运动的影响之前几种情况讨论的均是在单运动副间隙状态下,机构的动力学响应问题。
但现实生活中,大多数复杂机构存在着多运动副间隙的状况,所以,在本算例中将曲柄和连杆、连杆和摇杆都设为含运动副间隙,两个间隙r 都取0.1mm,对机构进行动力学仿真,与之前含一个运动副间隙的状态进行对比。
图6为双运动副间隙与单运动副间隙下连杆的速度对比图,其中点划线和实线分别表示双运动副间隙、单运动副间隙状态。
图6 双运动副间隙与单运动副间隙下连杆的速度对比由图6可以看出,双运动副间隙会使连杆的速度产生一定的波动,其明显大于单运动副间隙对机构的影响,且速度的幅值存在明显的滞后效应。
图7、图8分别为单运动副间隙和双运动副间隙状态下连杆的加速度-时间曲线。
图7 单运动副状态下连杆的加速度-时间曲线图8 双运动副状态下连杆的加速度-时间曲线由以上两图对比可以看出,双运动副间隙所产生的加速度波动更加复杂,连杆的加速度幅值增大很多,也存在明显的滞后效应。
由于双运动副间隙的耦合,机构动力学响应的不确定性更大,更加趋近于机构实际的运动情况,由间隙造成的机构整体传递误差会变得更加明显。
3 结论通过在LMS软件平台下对曲柄摇杆机构进行不同间隙因素影响下的建模仿真分析,对比其动力学响应特性,发现间隙大小、不同运动副参数、运动副轴与轴套的碰撞速度以及多间隙与单间隙运动副结构等多种因素对机构运动的影响均很大,得出的一些规律可为之后的结构设计提供参考。