插秧机分插系统的设计
浅谈插秧机的分插机构

浅谈插秧机的分插机构作者:谢敏来源:《中国科技博览》2016年第24期[摘 ;要]各种型号的插秧机,一般都具有秧船、机架、秧箱、送秧机构、分插机构、传动系统、起落和调节机构。
其中分插机构和送秧机构为主要工作部件。
下文主要从插秧机的分插机构加以着重说明。
中图分类号:S223.91 文献标识码:A 文章编号:1009-914X(2016)24-0155-01分插机构是完成分秧、插秧的主要部件,它对插秧机的工作质量和整机结构有较大的影响。
分插机构主要由取秧器(秧爪或秧夹)、取秧器导向机构(控制滑道)和驱动机构所组成。
1、取秧器的类型及特点取秧器的作用是从秧丛中分取一定数量的秧苗并及时插入田中。
取秧器的类型有钳夹式、梳齿式和切扒式等几种。
钳夹式取秧器工作时,秧夹呈张开状态从秧苗冠部的光滑部分,近似水平地由高到低楔人秧丛。
在楔进过程中,秧苗受到挡片的推压和秧箱底板死角的阻挡,进入秧夹内。
随后秧夹关闭并锁住,将夹住的秧苗从秧箱中横分出来,并按一定的运动轨迹把秧插入泥田中。
接着秧夹上提和张开,将插好的秧苗留在田里。
这种取秧器的特点是秧苗夹持部位稳定,作业质量良好,但秧苗软而根长时,分秧阻力大,易折伤秧苗。
其结构较梳齿式复杂,成本高,不便于大小苗两用,主要用于插大苗和人力插秧机。
梳齿式取秧器(秧爪)的头部与柄部形成一夹角,这是为了使秧爪容易插人秧丛中,同时插秧后留下的插孔较小,促使秧苗直立。
工作时,秧爪头部从一定的高度通过秧帘伸入秧丛内,然后沿秧苗纵轴方向下梳,使秧苗遂步挤紧在梳齿间(利用了秧苗冠部较肥大的特点),通过阻秧器将秧苗从秧丛中纵分出,并把它插到泥田里。
插人泥土后,秧爪向后向上运动时,靠秧苗根须和泥浆的粘附,使秧苗留在田中。
梳齿式秧爪是目前我国插秧机上采用最广的一种形式。
它的特点是结构简单,大小苗通用性能好,分秧时有一定的梳理作用。
但夹持秧苗部位不稳,易产生勾秧,有伤秧、带秧现象。
人力夹式插秧机插带土小苗时,采用切扒式取秧器。
水稻插秧机分插机构性能检测试验台结构设计

水稻插秧机分插机构性能检测试验台结构设计作者:朱良科熊玮张健美姚亚芳袁加红朱德泉来源:《安徽农学通报》2013年第13期摘要:分插机构是水稻插秧机最关键的机构之一,其性能直接影响插秧质量。
目前国内企业主要依靠田间试验验证分插机构性能,周期长、费用高。
因此,设计出一种插秧机分插机构性能检测试验台,可以对研制出的分插机构进行相关性能参数测试,以分析其质量好坏。
所设计的分插机构性能检测试验台,通过皮带传动、链传动等将电机产生的动力传递给插秧机分插机构,以实现分插机构的运转与前进,利用传感器、高速摄像机采集秧针加速度信号、秧针动静轨迹信号,通过设计编程将图形显示在计算机屏幕上,以确定分插机构的性能。
关键词:分插机构;性能检测;试验台;结构设计中图分类号 S225.5+1 文献标识码 A 文章编号 1007-7731(2013)13-155-03分插机构是水稻插秧机最关键的机构之一,其性能直接影响插秧质量[1],其性能的好坏直接决定了水稻插秧机的工作可靠性,因此分插机構一直以来都是国内外水稻插秧机研究人员研究的热点之一[2]。
因此,设计出一种水稻插秧机分插机构性能检测试验台,可以对研制出的分插机构进行相关性能参数测试,以分析其质量好坏,对提高插秧机产品质量具有重要作用。
现在国内急需采用机构设计、优化设计等理论进行高速分插机构基础研究的开发工作,以避免我国插秧机市场被进口产品垄断[3]。
一些大学在这方面已经进行了研究工作,在理论上已设计完成各种高速分插机构,但目前高速插秧机分插机构秧针轨迹分析复杂、要求精度高。
完全等待整机田间试验验证,其周期长、费用高,需采用快速准确的试验手段加速研究进程。
国内插秧机生产企业基本没有使用插秧机分插机构性能检测试验台来检测分插机构的工作性能,而是主要靠产品结构和尺寸来保证分插机构质量[4]。
由于存在设计误差,特别是制造误差,出产的产品不符合实际工作要求,产品质量可靠性差。
许多企业依赖插秧机田间试验来不断完善机具,其周期较长,费用也较高。
插秧机系统设计设计说明书

0 引言我国是农业大国,水稻是我国的主要粮食作物,种植面积为0.29亿公顷.各级技术人员通过多年的探索,总结出群体质量栽培模式。
高性能插秧机是与当今世界插秧机设计、制造技术接轨的高新技术,他与过去的插秧机有关很大的区别,首先他的性能依据于现代水道群体质量栽培管理理论,促进水稻高产稳定。
高兴能插秧机所插的秧苗是通过表准化育秧规范培育而成的,插秧机所用的秧苗规格基本一致,插秧机就是为这样的秧苗而设计的所以查插秧质量比过去高的多,这也符合现代前后工序的衔接的工业化原理,这显然与形态千差万别的手拨有着本质的区别,可以说是先带农业发展的必然结果。
它的行走底盘和国产机不同,有别于国产机的独轮驱动的插秧机,机动性能和水田通过性好。
还有高性能插秧机的分体式浮板及液压放行装置基本上解决了长期以来国产机插秧机没有解决的壅泥、壅水及栽插深度不一致等弊端。
它配有调整取秧数量的手柄,可以方便的调整索取秧苗的数量。
他采用高强度铝合金、合金钢、PVC等材料先进工艺制造,保证了机器使用的可靠性。
但是由于我国土地条件的不同,及其正进行国产化开发,所以在使用中出现了和多的问题,首先是侧理合器手柄组装,调试,使用都出现了比较严重的问题,还有就是齿轮箱等也出现不少问题。
本设计也是最求进经济合理,和稳定性的方案进行的。
PF455S可以说是一种完美的中国型插秧机,但是问题也是不可避免的。
首先,对于它的的手柄安装加紧不当问题,其次,再者,支螺栓改进,最后,油门拉线的安装孔改进等问题。
本课题所着重研究是侧离器手柄板金件加工,操作设计较为简单,由于本次是改进设计,所设计的模具修改,没有作详细的介绍,本文着重于改进设计的探讨和相关的设计计算。
我的毕业设计题目是《PF455S插秧机及其侧离合器手柄的探讨和改善设计》,在东洋插秧机公司实习且完成了我的毕业设计。
在公司的开发部,我协助同事对策离合器手柄进行了改进设计。
对插秧机的工作原理及其特点有了深入的了解,在此基础上,我开始完成我的毕业设计。
水稻插秧机分插机构的仿真分析与优化设计

167中国设备工程Engineer ing hina C P l ant中国设备工程 2019.04 (上)1 水稻插秧机分插机构的理论分析1.1 运动学分析在研究水稻插秧机分插机构时,首先要从其动力学进行分析,为了更加直观地对其动力学原理进行分析,首先需要将水稻插秧机分插机构的结构示意图简化为曲柄摇杆机构(如图1所示),然后再用矢量计算法建立二维平面坐标,从图中计算出各个点的角位移、加速度和速度的公式:(1)角位移计算公式。
在图1中可知,BC 杆角α的位移计算公式可以表示为:(2)角加速度计算公式。
在图1中可知,BC 杆角α的加速度计算公式可以表示为:在图1中可知,AB 杆角β的加速度计算公式可以表示为:(3)角速度计算公式。
在图1中可知,BC 杆角α的速度计算公式可以表示为:在图1中可知,AB 杆角β的速度计算公式可以表示为:OA.曲柄 AB.连杆 BC.摇杆 D.秧爪图1 水稻插秧机分插机构的结构示意图简化为曲柄摇杆机构1.2 动力学分析在进行水稻插秧机分插机构的动力学分析时,要从以下2个方面出发。
(1)水稻插秧机分插机构中推秧、碰撞的过程。
当水水稻插秧机分插机构的仿真分析与优化设计温芳,付坤(广西大学机械工程学院,广西 南宁 530004)摘要:本文主要针对水稻插秧机分插机构进行仿真分析,并根据仿真分析的结果对水稻插秧机分插机构进行优化设计,从而有效提高我国农业种植的效率和质量。
关键词:水稻插秧机;分插机构;仿真分析;优化设计中图分类号:S223.91 文献标识码:A 文章编号:1671-0711(2019)04(上)-0167-02稻插秧机的曲柄绕着顺时针方向旋转65°后,曲柄上的凸轮与推秧拨叉发生分离,凸轮不再向推秧拨叉施加作用力,而随着推秧弹簧的反弹作用,推秧爪被推秧拨叉推到了底部。
在此过程中,水稻插秧机分插机构以及连杆在平面中进行复合运动,而推秧拨叉则绕着e 轴做相对运动。
机械专业优秀毕业设计《旱地插秧机的设计》答辩ppt
肆
盘钵输送组件
凸轮机构
棘轮链条 组件
双摇杆机 构夹苗
不完全齿 轮机构
06
Ⅱ 结构设计·移栽系统
零速移 栽机构
鸭嘴开 口机构
07
Ⅱ 结构设计·输苗系统
输苗 装置
进给 机构
出苗 机构
08
Ⅱ 结构设计·镇压浇水系统
·间歇浇水机构
设计临时蓄水钵,用曲柄滑块机构控制间歇浇水功能
·镇压机构
设计镇压轮,要摇杆机构调节镇压松紧程度。 09
Ⅱ 结构设计·传动系统
分析有各个系统的
1
传送比关系,选车
轮作为动力源。
变速链盘设计,实 现株距调节功能。
2
3
设计主轴与各个 系统的动力轴的
传动机构。
10
Ⅲ
强度校核
强度校核
选取关键及易受损零件 进行强度校核,验证设计的 可行性。
齿轮 合格
轴合格
易损零 件合格
11
Ⅳ
三维建模
零件建模
系统组装
整机组装
·不完全齿轮箱,创
意十足,稳定可靠。
·车轮动力源,节约资
源,移栽更稳定。
·链盘变速原理,简洁有效的实现株距调节。来自14THANK YOU!
15
旱地插秧机的设计
主要 工作
03
Ⅰ 研究背景·调研
国内外发展现状
插秧机的分类
名贵中药材的种 植工艺
04
Ⅰ 研究背景·方向确定
分苗系统 移栽系统 输苗系统
镇压浇水系统
传动系统
整技 体术 机要 构求
直立度高 伤苗率低 稳定可靠
行、株距可调
深度可调
05
Ⅱ 结构设计·分苗系统
插秧机偏置椭圆齿轮后插旋转式分插机构优化设计

插秧机偏置椭圆齿轮后插旋转式分插机构优化设计宫霞霞;刘丽【摘要】为了减少水稻秧块横向的挤压和撕扯,提高取秧精度,将农用插秧机偏置椭圆齿轮后插旋转式分插机构简化成椭圆齿轮曲柄连杆滑块机构.对曲柄连杆滑块机构进行运动学分析,建立其速度运算数学模型,并针对简化模型进行优化设计.实验证明,简化模型为农用插秧机提供了一种优化设计方法.%In order to reduce transverse compression as well as tearing of rice seedlings and raise seeding accurateness,backward rotary transplanting mechanism with offset elliptic gear transplanter was simplified into elliptic gear crank link slide,whose kinematic analysis was made to establish a mathematic model for its speed caculation.Based on the simplified model,optimization design was made.The experimental results show that the simplified model provides an optimized design method for transplanter.【期刊名称】《成都大学学报(自然科学版)》【年(卷),期】2011(030)004【总页数】3页(P368-370)【关键词】分插机构;曲柄滑块机构;优化设计【作者】宫霞霞;刘丽【作者单位】成都大学工业制造学院,四川成都610106;成都大学工业制造学院,四川成都610106【正文语种】中文【中图分类】S223.910 引言水稻在栽插时要求插秧机的插植臂在回转运动的过程中,当秧针取秧时苗箱横向移动的速度减慢,而在非取秧的时间间隔中苗箱的横向移动速度加快,从而实现非匀速送秧.这样可减少对秧块横向的挤压和撕扯,提高取秧精度,确保插秧效率.据此,为保证插秧过程中的农艺要求精度,对步行式插秧机的偏置椭圆齿轮后插旋转式分插机构进行优化设计.1 机构简化图及运动分析1.1 机构简化图偏置椭圆齿轮后插旋转式分插机构的结构如图1所示.图1中,在一个回转的壳体里(相当于轮系机构的行星架)安装3个全等的椭圆齿轮,3个椭圆齿轮的回转中心均在椭圆齿轮的焦点上,且相位相同,并支撑在壳体上,两套对称的栽植臂分别与两个行星轮轴相固连.工作时,壳体4作为一个原动件绕中心轮1的回转中心的转动,而中心轮1作为另一个原动体以壳体2倍的转速同向转动.栽植臂上秧爪输出的绝对运动为随壳体的平动和绕行星轮轴心的不等速转动的合成,从而使秧爪获得适于分秧、插秧的运动轨迹.另外,在栽植臂中附加推秧机构(由6、7、9和10组成),其作用是插秧时将秧苗准确推入土壤中.机构中,分插机构椭圆齿轮机构的结构设计精度决定了插秧机插秧效率及精度.因此,可将分插机构中的一套栽植臂轮系机构独立出来,简化成椭圆齿轮曲柄连杆滑块机构,其机构简图如图2所示.图1 偏置椭圆齿轮后插旋转式分插机构结构示意图图2 椭圆齿轮曲柄连杆滑块机构简图1.2 机构运动分析在简化后的椭圆齿轮曲柄连杆机构中,主动轮1和从动轮2是全等共轭的一对椭圆齿轮,P为瞬时节点,以O1P和O2P分别作为两轮极轴,当轮1以角速度ω1转过φ1角时,轮2则以变角速度ω2逆时针转过φ2角,节曲线上转过的弧长,MP⌒=NP⌒.同时,两轮的向径满足,r1+r2=A=2a.令向径 r1的极角为φ2,椭圆长半轴为 a,椭圆偏心率为e.主动椭圆齿轮的节曲线方程为,从动轮的节曲线方程为,传动比函数为,椭圆齿轮副的位置函数为,则有,对于曲柄滑块部分,以O2为坐标原点建立坐标系 xO2y,其位移方程为,则,对位移方程求导,得到速度方程为,因为,有,因此,滑块的速度,即分插的速度,可表示为,由此可见,分插速度为主动椭圆齿轮转角φ1的函数即,2 分插机构优化设计插秧机分插机构秧针取秧时,苗箱横向移动的速度减慢.而在非取秧的时问间隔中,苗箱的横向移动速度加快,从而实现非匀速送秧.根据这一农艺特点,建立机构优化设计数学模型.2.1 确定设计变量以椭圆齿轮节曲线的偏心率e,曲柄 l1相对于从动轮2的位置角α,曲柄l1的长度,连杆l2的长度及滑块的偏置距离 l3为设计变量,有,2.2 建立优化设计目标函数为保证取秧精度和插秧速度,以秧针取秧时的运动速度,即滑块进程时速度等于设定最佳速度(设为c),为设计目标,并确定滑块的左右两个极限位置时,曲柄O2B与x轴正向的夹角θ1,即:左极限,右极限,据此,目标函数可以写为,2.3 约束条件及优化设计模型(1)边界条件,(2)四杆机构曲柄存在条件,(3)最小传动角条件,(4)椭圆齿轮运动无突跳条件,即从动轮最大与最小角速度之比需满足K≤5,即,(5)曲柄和连杆的长度关系,则,机构优化设计数学模型为,其中,c=0.34m/s,ω1=180 rpm,Z=31,m=2.利用约束随机方向法进行求解得到, 优化参数即得到,3 总结通过对插秧机偏置椭圆齿轮后插旋转式分插机构简化成非圆齿轮曲柄连杆滑块机构,并对简化模型通过数学建模和优化设计计算,以确定机构的各结构参数,从而保证插秧机取秧精度及插秧效率的农艺要求.参考文献:[1]吴序堂,王贵海.非圆齿轮及非匀速比传动[M].北京:机械工业出版社,1997.[2]周杰,周少华.椭圆齿轮曲柄滑块机构的运动分析及设计计算[J].武汉交通科技大学学报,1998,22(3):84-87.[3]方明辉,李革,赵匀,等.基于Matlab的非圆齿轮副齿廓算法研究[J].农机化研究,2010,32(8):57-60.[4]程启森.基于UG的非圆齿轮设计与实现[J].煤矿机械, 2011,32(1):221-224.[5]于大坚,邬义杰,王彬,等.基于非圆齿轮传动的精密压力机驱动机构设计[J].组合机床与自动化加工技术,2010, 52(12):13-18.[6]尹建军,赵匀,张际先.高速插秧机差速分插机构的工作原理及其CAD/CAE[J].农业工程学报,2003,19(3):1-5.。
水稻插秧机分插机构优化设计与仿真分析
水稻插秧机分插机构优化设计与仿真分析
文 昌 俊1,2,王 虹 量1,2,王 冕1,2,张 恒1,2
(1 湖北工业大学机械工程学院,湖北 武汉 430068;2 湖北省现代制造质量工程重点实验室,湖北 武汉 430070 )
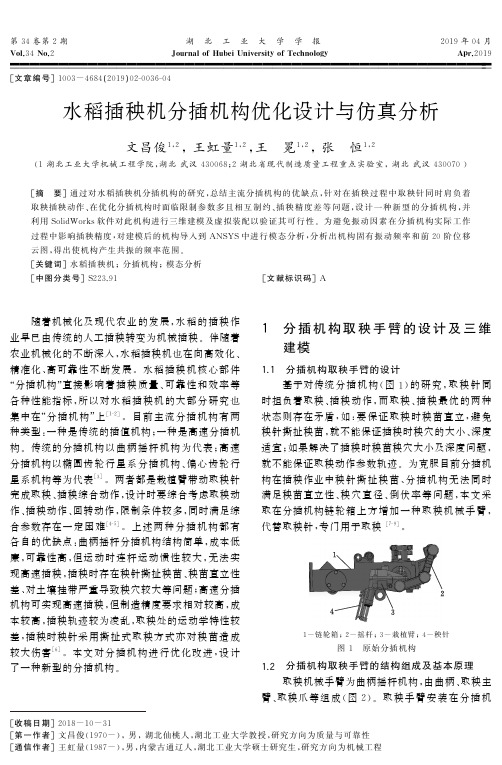
1- 链 轮 箱 ;2- 摇 杆 ;3- 栽 植 臂 ;4- 秧 针 图 1 原始分插机构
1.2 分 插 机 构 取 秧 手 臂 的 结 构 组 成 及 基 本 原 理 取 秧 机 械 手 臂 为 曲 柄 摇 杆 机 构 ,由 曲 柄 、取 秧 主
臂、取秧爪 等 组 成 (图 2). 取 秧 手 臂 安 装 在 分 插 机
第 34 卷 第 2 期
湖 北 工 业 大 学 学 报
2019 年 04 月
Vol.34No.2
JournalofHubeiUniversityofTechnology
Apr.2019
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
1 分 插 机 构 取 秧 手 臂 的 设 计 及 三 维 建模
水稻插秧机分插机构的创新设计

第!!卷第"期!##$年%月江苏理工大学学报(自然科学版)&’()*+,’-&.+*/0(1*.23)0.45’-67.3*73+*8937:*’,’/5(;+4()+,67.3*73)<’,=!!;’="63>4=!##$水稻插秧机分插机构的创新设计尹建军$,赵匀!,张际先$($=江苏理工大学机械工程学院,江苏镇江!$!#$?;!=浙江工程学院,浙江杭州?$##??)[摘要]机构创新是机械产品创新的重要内容之一,文中应用运动合成法、机构传动特点、联想扩展等思维方法,归纳总结了水稻插秧机分插机构的创新构思,同时介绍了两种新型分插机构———椭圆齿轮差动轮系分插机构和旋转式偏心链轮分插机构的工作原理,最后指出创新构思可以结合@A B(计算机辅助工程)软件C D E F G;H I D J B K进行仿真的手段L[关键词]水稻插秧机;分插机构;机构创新[中图分类号]6!!?=%$[文献标识码]M[文章编号]$##N O$N P$(!##$)#"O###"O#?分插机构是水稻插秧机的主要工作部件,它决定了机械插秧的质量和效率L我国是研究水稻插秧机起步较早的国家[$],!#世纪N#年代就在全国范围内应用带转臂滑道机构的滚动直插式洗根苗插秧机,!#世纪Q#年代吸收日本插秧机连杆式分插机构的优点研制出!R9系列机型,直到现在仍是我国插秧机械的主力产品L而日本在!#世纪S#年代率先实现了水稻种植机械化,其主要措施有两条:一是应用曲柄摇杆机构作为水稻分插机构,以连杆作为栽植臂,为提高其工作可靠性并减少秧苗回带,在栽植臂上附加了推秧装置,大大提高了插秧机的工作质量;二是以先进的农艺与农机结合,创造了旱育稀植的育苗方式,即以带土苗取代裸苗插秧,进一步提高了插秧质量,特别是提高了每穴秧苗的数量精确度L在插秧质量满足要求后,又积极寻求提高其效率,主攻方向仍然是分插机构,并在!#世纪Q#年代中期研制出新型高效的分插机构,这就是偏心齿轮行星系分插机构,推出整机性能优良的高速插秧机,工作效率比连杆式插秧机提高了!T L在此基础上又发展了带椭圆齿轮行星系分插机构的高速插秧机,到!#世纪%#年代普及率达Q#T以上L这两种分插机构均在中国申请了专利L可以看出,日本插秧机械化的发展普及,除了农机与农艺相辅相成的结果之外,还在于插秧机产品的不断创新,尤其以其主要工作部件分插机构的创新作为标志L在插秧机的发展历程中,分插机构的推陈出新,机构创新设计发挥着重要作用L文中从插秧机分插机构的创新构思角度,运用机构学理论,归纳总结了分插机构的创新思路,同时介绍了两种笔者自己设计的既能插大苗又能插小苗的高效分插机构,以及创新构思结合@A B(计算机辅助工程)软件C D E F G;H I D J B K进行仿真的手段,试图为机械设计人员提供一些行之有效的创新途径,并应用到机械产品的研制中L!分插机构的功能要求分插机构是插秧机的主要工作部件之一,由分插器和驱动机构组成,实现分秧和插秧的动作[]L工作中,分插器直接与秧苗接触进行分秧和取秧,为合适地取秧,使秧苗插直、插深、插稳、不勾不伤,分插器必须按一定的轨迹和姿态运动,驱动机构的作用就是使分插器按要求的轨迹和姿态准确可靠地运转L因此,驱动机构的工作性能直接影响到插秧的质量和工作效率,它应实现如下的功能要求:!使分插器按一定的轨迹运动,动轨迹一般为余摆线状;"分插器沿着轨迹运动时,对应取秧、插秧位置应有不同的姿态,以保证取秧顺利和秧苗插直L以曲柄摇杆式分插机构为例(计算以!R9O %?"S为准),如图$所示L[收稿日期]!##$O#P O$#[作者简介]尹建军($%N?O),男,山西大同人,江苏理工大学助教,博士生!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!L图!分插机构的工作轨迹及要求"#$%!&’()*+,#-$./0’/-1+(23#+(4(-05*65(./+/0#-$7.8/-0#-$4(9’/-#54根据以上所述,凡能满足功能要求的任何机构,均可用作分插机构的驱动机构,但在工程实际中,寻求既能满足此功能要求又在结构上易于实现、工作可靠、作业效率高的机构却并非易事:!分插机构的创新机构创新的目的,一方面是要求能达到构思新颖、结构独特、动作合理和工作可靠等重要指标,另一方面应注意其经济性和实用性,本质是扩展构思思路,实现一定意义上的最优设计:确定所需机构的途径一般有两种:一是查阅按功能和动作分类的机构应用实例进行机构选型;二是构思新机构[;]:机构创新是比较困难的,但并不是没有规律可循:现按插秧机分插机构发展历程,将其创新思路归纳如下:!"#转臂滑道机构[$]其结构简图如图;所示:它利用运动合成的方法,秧爪<的运动是牵连运动为秧爪随分插轮=!秧箱;秧帘<秧爪排=分插轮>环形滑道(凸轮)?副滚轮@主滚轮图;转臂滑道机构"#$%;A 9’(4/0#9B #()*69/41+#B ()#0’+*0/0#-$/+4的转动和相对运动为通过主滚轮@和副滚轮?受环形滑道>控制相对于分插轮=的摆动复合而成,从而形成所要求的轨迹和动作,满足了生产需要:!"!曲柄摇杆机构[$]其结构简图如图<所示:它利用了四杆机构中连杆的特点和运动姿态来实现给定的轨迹和动作的,用简单机构完成了较为复杂的动作过程,并且附加有推秧机构(由@、=、;和?组成),形成了结构简单,工作可靠的分插机构:!摇杆;推秧弹簧<栽植臂盖=拨叉>分离针?推秧器@凸轮C 曲柄D 栽植臂图<曲柄摇杆机构"#$:<A 9’(4/0#9B #()*69+/-,8#-,/$(E /+!"$非圆齿轮行星系机构[%,&,’]其结构简图如图=所示:它由>个全等的非圆齿轮(偏心齿轮或椭圆齿轮)和两套栽植臂组成:>个非圆齿轮的回转中心轴均支撑在壳体上,两套栽植臂分别与两个行星轮轴相固连:工作时!推秧凸轮;拨叉<推秧弹簧=栽植臂>推秧杆?分插器秧针@行星架C 行星轮D 惰轮!F 太阳轮图=偏心(椭圆)齿轮行星系机构"#$%=A 9’(4/0#9B #()*6(99(-0+#9((88#.0#9/8).8/-0$(/+5G50(4太阳轮!F 固定,而壳体(相当于行星架)作为原动件绕太阳轮的回转中心转动,从而使两套栽植臂得江苏理工大学学报(自然科学版)第;;卷到所要求的轨迹和动作!可见,它的构思,一方面利用了秧爪"的运动是随壳体#的转动(牵连运动)和行星轮$相对于壳体#的自转(相对运动)的合成,另一方面利用了非圆齿轮的非匀速比传动的特性,从而实现了预定的动作要求!由于其结构对称,为旋转式,动力性能好,适于高速作业,且驱动轴旋转一周,插秧两次,工作效率大大提高!!"#椭圆齿轮差动轮系机构[$]其机构示意图如图%所示!它由&个全等的椭圆齿轮和两套栽植臂组成!&个椭圆齿轮的回转中心均在椭圆齿轮的焦点上,且相位相同,并支撑在壳体上,两套栽植臂分别与两个行星轮轴相固连!工作时,壳体(即行星架)作为一个原动件绕中心轮的回转中心的转动,而中心轮作为另一个原动体以壳体’倍的转速同向转动即:!()’!*,从而使两个被动行星轮输出所要求的运动,带动栽植臂形成所要求的轨迹和动作!它的创新,是借鉴了非圆齿轮行星系机构的构思联想扩展而来,巧妙利用了两自由度差动轮系和椭圆齿轮的非匀速比传动特性,减少了机构构件的数目,达到同样的功能效果!图%椭圆齿轮差动轮系机构示意图+,-.%/012345,06748,9-:;2<<,=5,04<6,;;27295,4<-247>?>523!"%旋转式偏心链轮机构[&]其机构示意图如图"所示!它由%个全等的偏心链轮和两套栽植臂组成!链轮组(、%、$相当于链轮组"、%、@绕!点转过($A B 形成,其中轮%有两组链轮轮齿,轮@、$为张紧链轮!工作时,中心链轮%固定,而壳体’(行星架)作为原动件绕中心链轮的回转中心!转动,从而使两个被动行星链轮输出所要求的运动,带动栽植臂形成所要求的轨迹和动作!这种构思,巧妙利用了偏心链轮的非匀速比传动特性,又利用与中心链轮(偏心率相同的链轮&、%作为张紧轮,解决了链长变化对传动的影响,实现了预定的运动要求,得到了新的传动机构,开阔了创新思路!(、"行星链轮’行星架&链条@、$张紧链轮%太阳链轮#、C 秧针图"旋转式偏心链轮机构示意图+,-."/012345,06748,9-:;7:545,9-5?=2:;2002957,0>=7:0D 258122<>>?>523’结束语从分插机构创新的构思可以看出,机械产品的研制和革新是一个动态的复杂过程,为实现既定的功能要求,创新设计可以应用多种原理和思维方法来完成,扩展构思的途径,一方面力求达到构思新颖、结构独特、动作合理和工作可靠等重要指标,另一方面应注意其经济性和实用性,最终实现机械的创新!文中应用运动合成法、机构传动特点、联想扩展等思维方法,研究机构创新设计的理论,再结合计算机辅助工程E F G ,可以为机械产品的开发提供强有力的手段!比如,结合能够对物理模型进行运动学/动力学仿真和分析的E F G 软件产品———H I J K L M N O I P G Q ,可以使设计者在设计的同时进行仿真,无论设计的模型或方案是否正确,是否符合要求,都可以进行仿真!这样就可以使某种构思得到检测,随时修改,再仿真,直到得到满意的结果!最后指出,椭圆齿轮差动轮系分插机构和旋转式偏心链轮分插机构已获国家专利,其中椭圆齿轮差动轮系分插机构经样机试验,运转性能良好,达到了设计要求![参考文献][(]张宏业,周景文!水稻插秧机发展概况[R ].农牧与食品机械,(C C ’(@):’S ".[’]张春林,等!机构创新方法研究[O ]!北京:机械工业出版社,(C C C !(下转第"$页)#第%期尹建军等:水稻插秧机分插机构的创新设计(上接第R页)[F]桑正中S农业机械学[T]S北京:机械工业出版社,D U V V S[W]赵匀S农业机械计算机辅助分析和设计[T]S北京:清华大学出版社,D U U V S[X]应义斌,赵匀S偏心齿轮行星系分插机构的分析研究[=]S农业工程学报,D U U R,D F(W):D F E Y D F W S [Z]赵匀,等I双季稻高速插秧机偏心链轮分插机构结构设计和参数优化[=]I机械工程学报,C E E E,F Z (F):F R Y W E S[R]赵匀,等I椭圆齿轮行星系分插机构的机理分析和计算机优化[=]I农业工程学报,C E E E,D Z(W):R V YV D S[V]尹建军I水稻插秧机差速分插机构的计算机辅助分析与设计[P]I杭州:浙江大学,D U U U S@:+7""(?#3’"<P+&’<"()*+/#2#3’"<L1$#"3’"<T+4:#"’&,()[’4+@2#"&/$#"3+2&2".3*4&(51&D,#+-621&C,#+-./3*(7*4&D(D I*4:(($()T+4:#"’4#$;"<’"++2’"<,=’#"<&.>"’?+2&’3%()*4’+"4+#"-@+4:"($(<%,A:+"B’#"<,=’#"<&.C D C E D F,G:’"#;C I A:+B’#"<7"&3’3.3+ ()*4’+"4+#"-@+4:"($(<%,O#"<J:(.,A:+B’#"<F D E E F F,G:’"#)!"#$%&’$:T+4:#"’&,’""(?#3’("’&("+()3:+’,/(23#"34("3+"3&3(’""(?#3+,#4:’"+/2(-.43&I G2+L #3’?+3:’"K’"<()&+/#2#3’"<L/$#"3’"<,+4:#"’&,()2’4+32#"&/$#"3+2’&’"32(-.4+-’"3:+/#/+2,#"-3:+ M(2K’"</2’"4’/$+&()3M("+M3%/+&()&+/#2#3’"<L/$#"3’"<,+4:#"’&,()2’4+32#"&/$#"3+2&———+$$’/3’4#$-’)L )+2+"3’#$<+#2&%&3+,,+4:#"’&,#"-2(3#3’"<3%/+()+44+"32’4&/2(4K+3M:++$&&%&3+,,+4:#"’&,———#2+’"32(-.4+-I*+?+2#$,(-+&()3:’"K’"<#2+#//$’+-,&.4:#&K’"+3’4&%"3:+&’&,)+#3.2+.&+()32#"&)+2,+4:#L "’&,,#&&(4’#3’("#"-+03+"&’(",+3:(-I Q#&3$%,’3’&/(’"3+-(.33:#33:+4(,H’"#3’("()42+#3’?+3:’"K’"< M’3:M(2K’"<,(-+$()G!;(G(,/.3+2!’-+-;"<’"++2’"<)’&#"+))+43’?+,+#"&)(2,#4:’"+-+&’<"+2&I()*+,%-#:2’4+32#"&/$#"3+2;&+/#2#3’"<L/$#"3’"<,+4:#"’&,;,+4:#"’&,’""(?#3’("(责任编辑王丽伟)水稻插秧机分插机构的创新设计作者:尹建军, 赵匀, 张际先作者单位:尹建军,张际先(江苏理工大学机械工程学院), 赵匀(浙江工程学院)刊名:江苏理工大学学报(自然科学版)英文刊名:JOURNAL OF JIANGSU UNIVERSITY OF SCIENCE AND TECHNOLOGY年,卷(期):2001,22(5)引用次数:6次1.张宏业.周景文水稻插秧机发展概况 1992(04)2.张春林机构创新方法研究 19993.桑正中农业机械学 19884.赵匀农业机械—计算机辅助分析和设计 19985.应义斌.赵匀偏心齿轮行星系分插机构的分析研究 1997(04)6.赵匀双季稻高速插秧机偏心链轮分插机构结构设计和参数优化[期刊论文]-机械工程学报 2000(03)7.赵匀椭圆齿轮行星系分插机构的机理分析和计算机优化[期刊论文]-农业工程学报 2000(04)8.尹建军水稻插秧机差速分插机构的计算机辅助分析与设计 19991.期刊论文王江兰.陶栋材.段海燕.滕召金.WANG Jiang-lan.TAO Dong-cai.DUAN Hai-yan.TENG Zhao-jin水稻插秧机分插机构的主要形式及关键技术-湖南农机2009,36(3)研究影响高速分插机构发展的关键理论技术对高速插秧机的发展有重要意义.目前水稻插秧机的分插机构主要有传统机构及高速机构2类约10余种形式,不同形式分插机构的结构特点、工作原理及适用性各有差异.高速插秧机是水稻插秧机的发展方向和重点,提出的影响现代高速水稻插秧机分插机构发展的关键理论技术.可为采用高速分插机构的高速插秧机的设计提供理论依据.2.期刊论文陈建能.赵匀水稻插秧机分插机构的研究进展-农业工程学报2003,19(2)分插机构是水稻插秧机的主要工作部件,其性能决定其插秧质量、工作可靠性和单位时间的插次.该文总结了目前2种主要类型的分插机构(曲柄摇杆分插机构和行星轮系分插机构)的研究进展,分析比较了这2种机构的优缺点,并提出进一步研究的方向.3.学位论文王金武高速水稻插秧机分插机构试验台的研究;割前摘脱稻麦联收机底盘的设计研究2003研究适应不同形式高速水稻插秧机分插机构试验台,在实验台上能够测试用于动力学和运动学模型建立的相关参数,为我国水稻插秧机分插机构的研制提供理论需要的试验研究手段,将有利地促进我国水稻种植机械化的发展.研制了稻麦联合收获机液压驱动行走底盘是联收机的关键部分,为加快割前摘脱联收机及早投入市场奠定坚实的基础.同时能够进一步推进我国稻麦联合收获的机械化作业.本文的主要研究工作概括如下:1、高速水稻插秧机分插机构试验台(1)设计出能实现不同形式高速分插机构的试验台.在系统分析国内外高速分插机构研究现状、设计理论和研究方法的基础上,应用VB6.0下开发的"高速水稻插秧机分插机构计算机辅助分析软件",分析了4种具有应用前景的高速分插机构(差速、椭圆齿轮行星式、正齿行星轮式、偏心链轮式)的秧爪轨迹及差异,确定了水稻分插机构试验台总体方案;使之能进行不同形式的高速分插机构相关参数的台架试验测试.(2)进行了高速分插机构试验台关键部件的研究.设计输入链轮轴,主要是为了能测量出输入链条所受的拉力.在轴上的输入链轮与大带轮之间的部分上面贴上应变片.然后通过集流环、电阻应变仪、电平记录仪等仪器测量出链轮轴所受的扭矩,从而间接地测量出链条所受的拉力;秧针的设计,在取秧时要受到一定的阻力,称之为取秧力.为了能测量秧针的取秧力,需要将秧针作成弹性元件,在其上面贴上应变片,然后通过电阻应变仪、电平记录仪等仪器测量秧针的取秧力.(3)进行有关运动参数和动力参数的测试,为建立分插机构的运动学和动力学模型提供理论依据2、割前摘脱稻麦联收机底盘的设计研究(1)应用人工神经网络的知识解决变速箱设计问题,与运用优化设计的方法设计变速箱相比是一个很好的加快运算速度的解决办法.试验表明这种变速箱结构简单,工作稳定.(2)通过计算,得到了符合要求的履带联合收获机的转向离合器转矩,试验分析离合器摩擦片部件的影响因素,确定了转向制动离合器摩擦片的数目及其结构.(3)在考虑分析水稻收获机行走系的诸多因素后,设计了行走系的整体和部件,达到了联合收获机行走要求.(4)设计了液压驱动系统.履带式联合收获机液压-机械式行走系统设计时依据,确定了闭式油路系统,以组合式变量泵定量马达(变量泵+定量马达)作为液压执行元件的工作系统;液压系统相关参数和液压系统的参数的确定、液压辅助元件的选择、液压系统压力损失验算和液压系统控制方案及性能等方面进行了研究.(5)对液压闭式系统的测试和生产考核,实测结果表明各项性能指标均能够符合设计要求和整机的作业要求.4.期刊论文叶春强.户春影.黄文怡.YE Chun-qiang.HU Chun-ying.HUANG Wen-yi基于COSMOSMotion的水稻插秧机分插机构运动分析-机械2009,36(5)建立了水稻插秧机分插机构秧针运动的数学模型,用SolidWorks对机构进行三维造型和装配,用与SolidWorks无缝集成的COSMOSMotion三维动力学仿真软件对分插机构进行运动仿真模拟,得到运动速度图及加速度图.从而使机构运动分析直观化、可视化,为选择合理的分插机构的结构参数、提高插秧性能提供依据.5.学位论文马旭高速水稻插秧机分插机构试验台的研究变量深施肥机的研制2001研究适应不同形式高速水稻插秧机分插机构试验台,并在实验台上检测分插机构的秧爪运动轨迹和姿态,为中国水稻插秧机分插机构的研制提供快速的试验研究手段,将有利地促进中国水稻种植机械化的发展.研制手控变量深施肥机是精确农业技术的重要组成部分.可实现机具在每一操作单元上因土壤、因作物实施按需施肥,因而大大的提高了肥料利用率并减少多余肥料对环境的不良影响,有明显的经济、社会和生态效益,是世界农业发展的方向.该文结合国家自然科学基金、中国博士后科学基金和国家"九五"重中之重科技攻关招标等资助项目,进行高速分插机构试验台和变量深施肥机的研究.其研究内容对国民经济的发展和中国农业现代化水平的提高具有重要的意义.该文的主要研究工作概括如下:1、高速水稻插秧机分插机构试验台的研究;首次设计出能实现不同形式高速分插机构的试验台.进行了高速分插机构试验台关键部件的研究.提出了高速水稻插秧机分插机构运动轨迹与姿态检测系统.2、变量深施肥机的研制;制定了变量深施肥机的总体方案.建立了外槽轮排肥器施肥量的数学模型.开发了单片机系统作为变量深施肥机的控制器.设计了新颖的钝角凿型分层深施肥开沟器.在国内首创手控变量深施肥机.分析了今后用于精确农业技术的全球定位系统(GPS)和建立地理信息系统(GIS)的应用软件.6.期刊论文龚永坚.刘丽敏.俞高红.陈霓.熊永森.Gong Yongjian.Liu Limin.Yu Gaohong.Chen Ni.XiongYongsen水稻插秧机后插式分插机构运动分析与试验-农业机械学报2005,36(9)对水稻插秧机后插式分插机构进行了分析.通过秧针端点运动轨迹上的6个特定点,对后插式分插机构的运动学特性作了理论分析和计算机模拟,并利用高速摄像对机构运动学分析进行了试验验证.理论分析和田间试验表明,后插式分插机构的结构参数选择合理,插秧性能优良.7.期刊论文陈德俊.Chen Dejun水稻插秧机后插式分插机构研究-金华职业技术学院学报2001,1(4)本文用计算机对水稻插秧机后插式分插机构进行了分析研究.通过秧针端点运动轨迹上的6个特定点,分析了后插式分插机构的运动学和动力学.经理论分析和田间试验表明,后插式分插机构的结构参数选择是合理的,插秧性能是优良的.8.学位论文刘丽敏正齿行星系分插机构的动力学分析及验证2005水稻插秧机械化是提高插秧效率、减轻农民劳动强度的主要措施之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录一、设计的要求、目的及意义 (1)1.1水稻插秧机简介 (1)1.2分差机构的设计要求分析 (1)二、总体方案设计与论证 (1)2.1总体方案设计 (1)2.2总体方案评估与确定 (2)三、机构分析与计算 (3)3.1曲柄摇杆机构的三维动态仿真 (3)3.2曲柄摇杆机构的理论计算验证 (5)3.2.1建立位移方程 (6)3.2.2建立速度方程 (7)3.2.3建立加速度方程 (8)四、关键部件设计 (9)4.1推秧机构设计 (9)五、结论 (11)六、心得体会和建议 (12)七、参考文献 (12)需要三维零件图、装配图、autoCAD图,汇报PPT,联系微信qiufeng3577一、设计的要求、目的及意义1.1水稻插秧机简介中国传统的插秧工具──秧马和莳扶,已有近千年的使用历史。
宋代苏轼曾作“秧马歌”,叙说了湖北农民使用秧马的情景。
使用莳扶可以代替手工分秧,并将秧苗梳入泥中定植,直至20世纪50年代,某些地区仍在使用。
中国水稻插秧机的研制工作始于1953年。
1956年在莳扶分秧方式的启发下,首次提出群体逐次分格取秧、直接栽插的秧苗分插原理,从而在水稻插秧机的研制上取得了突破,研制出水稻拔取苗移栽的第一代样机。
到1960年,各地推荐生产上使用的人力、畜力插秧机已达21种。
1967年,第一台自走式机动插秧机“东风-2S”型通过鉴定定型并投入生产,每天可插秧15~20亩。
日本于1898年,发表第一个水稻插秧机专利;意大利于1915年开始研究拔秧苗的水稻插秧机,至50年代已有拖拉机配套的商品出售,但都由于结构复杂、造价高,作业时需用辅助劳力多而未能推广。
日本于60年代研制带土小苗的栽植技术和相应的水稻插秧机。
1966年后,工厂化水稻育秧设备研制成功,促进了插秧机械化的迅速发展。
1.2分差机构的设计要求分析分插系统旨在实现秧苗从秧盘上分离到插植入水田中这一动作。
该过程的主要步骤有:分秧、运秧、插秧、回程四个阶段。
此过程应设计为循环过程以实现更高效的机械自动化。
问题的难点在于:1、如何顺利将秧苗从秧盘上分离出来;2、如何保证秧苗在插秧瞬间与地面尽量保持垂直;3、如何在插秧之后顺利进入回程并不碰到已插好的秧苗。
为此应该保证分差机构的运动与插秧机的运功的合成运动轨迹为鱼尾线状,且“鱼头”部分越窄小越好。
同时根据实际插秧情况,应保证秧苗间距在20cm左右,设计插秧频率拟定为120次/min,插秧深度10~20mm。
二、总体方案设计与论证2.1总体方案设计方案甲:采用曲柄摇杆机构,主动件为曲柄,使秧爪按照特定轨迹运动。
此机构设计简单,传动准确,快速。
结构简图如下:图1方案乙:采用连杆机构,利用油缸作为主动件,来实现秧爪的特定轨迹运动。
此机构设计简单,但是需要额外的液压油路。
简图如下:图22.2总体方案评估与确定评估论证:方案甲结构简单,使用机构单一,方便制造;方案乙岁结构简单,但是需要设计专用的液压回路,且使用液压设备实现快速动作结构较复杂,制造成本较高。
因此相较之下,方案甲更适合农用水稻插秧机的设计。
方案确定:采用曲柄连杆机构实现分插机构的特定轨迹。
三、机构分析与计算3.1曲柄摇杆机构的三维动态仿真首先通过轨迹仿真了解杆1、杆2、杆3分别对运动轨迹的影响,模拟图如下:图3图4由模拟结果可以看出:杆1的作用:改变轨迹轮廓的大小。
杆2的作用:改变去程和回程直接的水平间隔。
杆3的作用:与杆2协同控制水平间隔。
通过不断调整各杆长度,避免曲柄连杆机构出现死点的同时让轨迹更加符合所需的曲线形式,便得到如下仿真轨迹。
结合实际尺寸情况按比例设计各构件尺寸如下:杆1(曲柄)长度:35mm 杆2长度:90mm杆3(摆杆)长度:90mm 分离针前端到A点距离:190mm保证分离针前端与A,B两点在同一直线上,插植臂与AB的夹角(锐角)为60°下图为水稻插秧机不发生水平移动时的轨迹::图5加入水平运动后的合成运动轨迹:图6局部放大:图7 3.2曲柄摇杆机构的理论计算验证图83.2.1建立位移方程 1)矢量方程CB OC AB OA →→→→+=+其中,αα32,为未知数。
将上述方程组联立后得设 则有设设ββαα-=-33,)cos(A 在0到π之间,α3可求。
2)曲柄OA 的质心3)连杆AB 的质心4)摇杆BC 的质心⎪⎩⎪⎨⎧==t R t R y x AA ωωsin cos ⎪⎩⎪⎨⎧+=+=+=+=αααα22332233sin sin cos cos L y L y y L x L x x A C B A C B [])(sin )(cos 2323332222)()(=-+-++-+--yy x x L L L y y x x AC A C A C A C ααxx y y CACA --=βtan )()()()(22322223223)cos(y y x x L L y y x x L CA C A C A C A ----+-++=-βα⎪⎩⎪⎨⎧==t t R y R x ωωsin cos 1111⎪⎩⎪⎨⎧++=++=)sin()cos(22222222ααααa aA a a A L y y L x x3.2.2建立速度方程 1)A 点速度2)B 点速度3)OA 质心4)AB 质心5)BC 质心⎪⎩⎪⎨⎧+=+=αα333333sin cos L y y L x x c C c C ⎪⎪⎪⎩⎪⎪⎪⎨⎧⋅⋅=-=t R y t R x AA ωωωωcos sin ⎪⎪⎩⎪⎪⎨⎧⋅-⋅=⋅⋅-⋅=⋅αααα222222cos sin L y y L x x A BA B ⎪⎪⎩⎪⎪⎨⎧=⋅-=⋅tt R y R x ωωωωcos sin 1111⎪⎪⎩⎪⎪⎨⎧+⋅-⋅=⋅+⋅-⋅=⋅)cos()sin(2222222222ααααααa a A a a A L y y L x x ⎪⎪⎩⎪⎪⎨⎧⋅=⋅⋅-=⋅αααα33333333cos sin L y L x CC6)BC 杆角速度7)AB 杆角速度3.2.3建立加速度方程 1)A 点加速度2)OA 质心加速度3)BC 角加速度)sin(sin cos 323223ααααα-⋅+⋅=⋅L yxAA)sin(sin cos 322332ααααα-⋅+⋅=⋅L yxAA⎪⎪⎩⎪⎪⎨⎧-=⋅⋅-=⋅⋅tR t R y x AAωωωωsin cos 22⎪⎪⎩⎪⎪⎨⎧-=⋅⋅-=⋅⋅t t R y R x ωωωωcos sin 211211)sin(sin cos 32322213ααααα-+=⋅⋅L C C ⎪⎪⎩⎪⎪⎨⎧⋅-⋅+⋅⋅=⋅-⋅+⋅⋅=αααααααα22232322223231sin 2sin 3cos 2cos 3L L y C L L x C A A4)AB 角加速度5)AB 质心加速度6)BC 质心加速度将通过仿真确定的数据代入上面的公式可验证当到达轨迹最下端时,AB 的水平速度与OA 的水平速度近似相等且为零。
合成插秧机水平移动速度后仍远小于AB 的垂直方向速度,故此数据较为合理,可用作机构具体设计。
四、关键部件设计4.1推秧机构设计推秧机构的作用是在插植臂运动到最下端将秧苗送入水田后通过快速动作将秧苗打入水田中,避免插植臂返回过程中分离针又拉扯到秧苗将秧苗拖出或撞倒,故做出如下设计方案:)sin(sin cos 32232312ααααα-+=⋅⋅L C C ⎪⎪⎩⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡+⋅++⋅⋅-⋅⋅=⋅⋅⎥⎦⎤⎢⎣⎡+⋅++⋅⋅-⋅⋅=⋅⋅)sin(2)cos()cos(2)sin(2222222222222222ααααααααa a a A a a a A a a L y y a a L x x ⎪⎪⎩⎪⎪⎨⎧⋅+=⋅⋅⋅+-=⋅⋅)sin 3cos ..()cos 3sin ..(323333323333ααααααααL y L x C C图9如示意图所示。
推秧机构主要由凸轮机构实现,具体过程是:将凸轮5与曲柄固连在一起,曲柄每转动一周便带动凸轮5相对插植机构6转动一周,并在插植机构位于最下处时,是凸轮撤去对拨叉4的作用力,弹簧3便会在弹性力的作用下推动拨叉快速推动推秧杆2完成打苗动作,使秧苗脱离分离针,插入水田中。
凸轮大致形状如下:图10如上图所示,凸轮相对插植臂旋转一周则可使得拨叉有一个慢速回程压缩弹簧的过程,然后到达凸轮径最大值处时,对拨叉的推力突然消失,拨叉将被弹簧迅速反弹,同时带动推秧杆快速推秧。
五、结论根据整个过程的仿真计算,所设计的分插机构基本可以满足实际需要,机构设计完成后的二维图大致如下:图11三维模型及仿真如下:图12六、心得体会和建议本次课程设计过程中,我们小组齐心协力共同完成了机构的分析计算、仿真模拟、二维及三维建模,在这个过程中复习巩固了机械原理、机械制图等相关课程的理论知识,再次练习了AutoCAD的使用,同时自学了SolidWorks软件的三维造型和仿真模拟,花费了数周时间终于成功的解决了课程设计对我们的要求。
整个过程让我们了解认识了一个完整的设计过程是怎么样的,完成设计工作的步骤规范有哪些,这些不论是对我们将来工作还是继续深造都有很大的帮助,机电一体化课程设计对我们的帮助很大,我们收获颇丰。
同时这个题目也让我们认识到了农业机械化对农业发展的重要影响,让我们对农业机械化在推动社会主义现代化建设中的重要作用有了更深刻的了解。
七、参考文献【1】宋建农、刘彩玲等.农业机械与设备[M].北京:农业出版社,2006.【2】俞高红,赵匀,赵凤芹。
等.高速水稻插秧机分插机构研究现状和最新进展[J].农机化研究,2003(2):4l一43.【3】尹建军,赵匀,张际先.高速插秧机差速分插机构的工作原理及其CAD/CAE[J].农业工程学报,2003,19(3):90—94.【4】华南农学院农机系.水稻插秧机原理与设计[M].1978.【5】孙桓,陈作模,葛文杰等.机械原理第七版[M].高等教育出版社,2006.【6】张建民等.机电一体化系统设计[M].北京:北京理工大学出版社,2008.【7】唐宾,时胜德等.曲柄摇杆式分插机构的动力学分析[J].2009。
【8】鲁屏宇等.工程图学第2版[M].机械工业出版社,2010.。