冗余自由度仿人机械臂自适应迭代学习控制研究
面向ORU更换的冗余机械臂及其柔顺控制的研究

面向ORU更换的冗余机械臂及其柔顺控制的研究1. 引言1.1 背景介绍冗余机械臂是指具有超过六个自由度的机械臂,可以在操作空间内实现多种姿态和路径的运动。
随着机械臂应用领域的不断扩展,对机械臂的柔顺性和精准性要求也越来越高。
ORU(Orbital Replacement Unit)更换是航天器维修中的重要任务之一,需要机械臂能够在狭小空间内完成复杂的动作。
传统的机械臂在ORU更换任务中存在柔顺性不足、运动轨迹不够灵活等问题,因此有必要对冗余机械臂进行研究和优化。
冗余机械臂具有多余的自由度,在设计和控制上具有一定困难,但也带来了更大的灵活性和工作空间。
柔顺控制技术可以使机械臂在完成任务时具有更好的精准度和柔顺性,可以通过优化控制算法实现对机械臂的精准控制。
冗余机械臂的设计与优化以及柔顺控制算法的实现和优化是本研究的重点内容。
本研究旨在通过对冗余机械臂及其柔顺控制的研究,提高机械臂在ORU更换任务中的可靠性和效率,为航天器维修提供更好的支持。
通过实验结果分析和总结,进一步探讨未来冗余机械臂和柔顺控制技术的发展方向,为相关领域的研究和应用提供借鉴和参考。
1.2 研究意义冗余机械臂是当前机器人领域的研究热点之一,其具有较高的灵活性和适应性,可以完成更加复杂和多样化的任务。
ORU更换技术则是指机器人在执行任务时可以通过更换末端执行器来适应不同的任务需求,提高机器人作业效率和灵活性。
柔顺控制技术为机器人提供更加平滑和精准的运动控制,能够有效降低机械臂运动过程中的震动和振动,提高机械臂的运动精度和稳定性。
本研究的意义在于推动机器人领域的技术创新与发展,提高机器人在工业生产和服务领域的应用水平,促进机器人技术的普及和推广。
本研究也有望为冗余机械臂和柔顺控制技术的研究提供新的思路和方法,为相关领域的研究人员提供参考和借鉴。
1.3 研究目的研究目的是为了探究如何利用冗余机械臂和柔顺控制技术来实现ORU更换任务的高效完成。
多冗余度机械臂机构设计及仿生运动研究---优秀毕业论文参考文献可复制黏贴
工学硕士学位论文多冗余度机械臂机构设计及仿生运动研究赵凯哈尔滨工业大学2007年7月国内图书分类号:TP242.6国外图书分类号:681.5工学硕士学位论文多冗余度机械臂机构设计及仿生运动研究硕士研究生:赵凯导师:吴伟国 教授申请学位:工学硕士学科、专业:机械设计及理论所在单位:机电工程学院答辩日期:2007年7月授予学位单位:哈尔滨工业大学Classified Index:TP242.6U.D.C: 681.5Dissertation for the Master Degree in EngineeringMechanism Design of Manipulator with Multiple Redundant Degrees of Freedom and Its Bionic MotionResearchCandidate:Zhao KaiSupervisor:Prof. Wu WeiguoAcademic Degree Applied for:Master of EngineeringSpeciality:Mechanical Design and Its Theory Affiliation:School of Mechatronics Engineering Date of Defence:July, 2007Degree-Conferring-Institution:Harbin Institute of Technology哈尔滨工业大学工学硕士学位论文- -I 摘 要多冗余机械臂能够克服传统非冗余度机器人操作臂的灵活性差、环境适应性不高的缺点,有利于提高操作灵活度、回避障碍能力,有着很好的可操作性,其研究在诸如空间漂浮物包围抓取与回收等的空间技术、复杂环境等方面具有实用价值,因此本文基于一种改进型无奇异全方位关节机构研究多自由度机械臂及其仿生运动理论具有重要的理论意义与应用价值。
超冗余移动机械臂逆运动学快速求解的两种方法比较
超冗余移动机械臂逆运动学快速求解的两种方法比较超冗余移动机械臂逆运动学是机器人控制中的一个重要问题,其主要目的是计算出给定末端执行器的位置和姿态时,各个关节的转动角度。
在实际应用中,机械臂需要具有超冗余结构,以提高机械臂的可靠性和精度。
在超冗余移动机械臂中,由于自由度数量的增加,求解逆运动学问题变得更加复杂和困难。
因此,在这种情况下,如何快速而准确地求解逆运动学问题是机器人控制中的重要研究方向。
目前,有许多方法用于解决超冗余移动机械臂逆运动学问题,其中最常见的方法是迭代学习控制和局部优化方法。
本文将比较这两种方法的优缺点。
迭代学习控制方法是一种基于学习的方法,它通过不断迭代优化得到答案。
它通过定义一个代价函数来度量系统的性能,并将逆运动学求解视为一种优化问题。
在每一次迭代中,该方法通过计算代价函数梯度,不断更新关节角度,直到达到预定的目标。
该方法具有以下优点:1.速度快:该方法运行速度快,可以在几毫秒内求解出逆运动学问题。
2.收敛性好:该方法能够在短时间内收敛到较高的精度。
3.适用范围广:该方法不依赖于特定的机械臂结构,因此可适用于各种类型的超冗余移动机械臂。
然而,该方法也存在一些缺点:1.依赖性强:该算法对模型的参数精度和初值敏感,需要进行多次试验和调试。
2.运算量较大:该方法需要在每轮迭代中计算代价函数梯度,运算量较大。
3.局限性:目前该方法主要适用于小工作空间内的机器人,当机器人的工作空间增大时,其效果将受到一定的限制。
局部优化方法是一种基于搜索的算法,它通过搜索局部最优解来求解逆运动学问题。
该算法通过分解问题,每次只搜索一小部分空间,通过适应性和随机性探索问题空间。
该方法具有以下优点:1.精度高:这种方法能够在可接受的计算代价下找到一个接近最优解的结果。
2.鲁棒性好:由于对初始化的关节角度和模型参数的依赖性较小,因此其具有较好的鲁棒性。
1.局限性:该方法容易陷入局部最优解,从而导致求解失败。
《2024年迭代学习控制算法研究及在机械臂中的应用》范文
《迭代学习控制算法研究及在机械臂中的应用》篇一一、引言迭代学习控制算法(Iterative Learning Control,简称ILC)是一种用于处理重复任务的优化算法。
该算法的核心思想是通过多次迭代来逐步优化控制策略,使得系统在每次迭代后都能达到更高的性能水平。
随着机器人技术、自动化控制等领域的发展,迭代学习控制算法在机械臂控制中得到了广泛的应用。
本文将重点研究迭代学习控制算法的原理、特点及其在机械臂控制中的应用。
二、迭代学习控制算法原理及特点1. 迭代学习控制算法原理迭代学习控制算法是一种基于反复迭代的过程,它通过对系统的输出与期望输出之间的误差进行评估,根据评估结果调整系统的控制策略。
在每次迭代过程中,系统都会根据前一次迭代的经验来优化控制策略,从而达到更高的性能水平。
2. 迭代学习控制算法特点(1)针对重复任务:迭代学习控制算法适用于需要执行重复任务的场景,如机械臂的轨迹跟踪、装配等。
(2)逐步优化:通过多次迭代逐步优化控制策略,使得系统在每次迭代后都能达到更高的性能水平。
(3)简单易实现:迭代学习控制算法实现起来相对简单,且对硬件要求不高。
三、机械臂控制系统概述机械臂是一种典型的重复任务执行系统,其控制系统需要具备高精度、高速度、高稳定性的特点。
机械臂控制系统通常包括传感器、控制器、执行器等部分。
传感器用于获取机械臂的状态信息,控制器根据状态信息计算控制指令,执行器根据控制指令驱动机械臂运动。
四、迭代学习控制在机械臂中的应用1. 轨迹跟踪机械臂的轨迹跟踪是一种典型的重复任务,通过应用迭代学习控制算法,可以显著提高轨迹跟踪的精度和速度。
在每次迭代过程中,系统都会根据前一次迭代的经验来调整控制策略,从而逐步优化轨迹跟踪的精度。
2. 装配任务在装配任务中,机械臂需要准确地完成零部件的组装。
通过应用迭代学习控制算法,机械臂可以逐步学习并掌握装配过程中的细微动作和力矩控制,从而提高装配的精度和效率。
不确定二自由度冗余并联机器人控制方法研究的开题报告
不确定二自由度冗余并联机器人控制方法研究的开题报告标题:不确定二自由度冗余并联机器人控制方法研究一、选题背景和意义随着机器人技术的快速发展,冗余并联机器人的应用越来越广泛。
并联机器人的冗余自由度可以提供更大的可操作空间和更高的精度和灵活性。
不过,受到工作空间、姿态、姿态变化等因素的影响,机器人系统总是存在一定的误差和不确定性。
如何解决不确定的因素对并联机器人控制带来的影响,提高机器人运动的精度和稳定性,一直是机器人控制领域亟待解决的问题。
因此,本文旨在研究不确定二自由度冗余并联机器人控制方法,探索如何通过控制算法来提高机器人系统的精度和稳定性,为实际工业生产和生活中的机器人应用提供技术支持。
二、研究内容和方法本文将主要研究不确定二自由度冗余并联机器人的控制方法,具体包括以下几方面内容:(1)基于运动规划的控制方法:通过运动学分析和建模,采用运动规划方法设计机器人的轨迹和姿态,控制机器人运动,实现高精度的控制;(2)基于逆向动力学的控制方法:通过建立机器人运动的动力学模型,根据机器人的运动状态反推出所需要的控制力和扭矩,控制机器人的运动;(3)基于自适应控制的方法:采用自适应控制方法根据机器人运动状态的变化,调整控制系统的参数和结构,提高机器人运动的精度和稳定性。
本文将采用文献调研、数学建模和模拟仿真等方法,分析和比较以上三种控制方法的特点和优缺点,探索适合不同场景下机器人控制的最优算法。
三、预期研究成果本文预期达到以下研究成果:(1)提出适用于不确定二自由度冗余并联机器人的控制方法,能够有效提高机器人系统的精度和稳定性;(2)通过仿真实验验证控制算法的可行性和优越性,分析不同因素对机器人运动的影响;(3)探索机器人控制领域的技术难题,为未来机器人控制算法和实际应用提供技术支持和参考标准。
四、研究计划和预期时间表本研究计划分为以下主要阶段:(1)阶段一:文献调研和理论研究(2022年1月-2022年4月);(2)阶段二:数学建模和控制算法设计(2022年5月-2022年8月);(3)阶段三:控制算法实现和仿真实验(2022年9月-2023年1月);(4)阶段四:实验结果分析和评估(2023年2月-2023年5月)。
《2024年迭代学习控制算法研究及在机械臂中的应用》范文

《迭代学习控制算法研究及在机械臂中的应用》篇一一、引言随着机器人技术的不断发展,机械臂已经成为现代工业、医疗、航空航天等众多领域中不可或缺的重要设备。
然而,机械臂的精确控制一直是其应用中的关键问题。
迭代学习控制算法作为一种有效的控制策略,在机械臂的精确控制中发挥着重要作用。
本文将首先介绍迭代学习控制算法的基本原理和特点,然后详细探讨其在机械臂中的应用及其所取得的成果。
二、迭代学习控制算法的基本原理及特点迭代学习控制算法是一种基于迭代思想的优化控制方法,通过反复执行任务并学习控制策略来逐步提高控制精度。
其基本原理是将任务分解为多个迭代周期,每个周期内根据上一次迭代的控制结果和系统响应来调整控制策略,以达到更好的控制效果。
迭代学习控制算法具有以下特点:1. 简单易行:算法实现相对简单,不需要复杂的数学模型和计算过程。
2. 精度高:通过反复迭代和优化,可以逐步提高控制精度,满足高精度控制需求。
3. 鲁棒性强:对于系统参数变化和干扰具有较好的适应能力,具有较强的鲁棒性。
4. 适用于重复性任务:对于具有重复性的任务,迭代学习控制算法可以显著提高工作效率和控制精度。
三、迭代学习控制在机械臂中的应用机械臂作为一种典型的复杂系统,其精确控制一直是研究热点。
迭代学习控制在机械臂中的应用主要表现在以下几个方面:1. 轨迹跟踪控制:利用迭代学习控制算法对机械臂的轨迹进行精确跟踪,通过反复迭代和优化,逐步提高轨迹跟踪的精度和速度。
2. 力控制:针对机械臂在操作过程中需要施加的力进行精确控制,通过迭代学习控制算法调整力的大小和方向,以满足操作需求。
3. 姿态调整:针对机械臂的姿态进行调整,使其达到预定位置和姿态。
通过迭代学习控制算法对姿态进行调整和优化,提高姿态调整的精度和速度。
4. 适应性控制:针对不同环境和任务需求,通过迭代学习控制算法对机械臂进行适应性控制,使其能够适应各种复杂环境和工作需求。
四、应用成果及展望迭代学习控制在机械臂中的应用已经取得了显著的成果。
《2024年迭代学习控制算法研究及在机械臂中的应用》范文

《迭代学习控制算法研究及在机械臂中的应用》篇一一、引言迭代学习控制算法(Iterative Learning Control,简称ILC)是一种针对重复性任务的优化控制策略,通过多次迭代过程,使系统逐渐逼近理想的控制效果。
随着机器人技术和自动化控制系统的不断发展,迭代学习控制在机械臂控制中得到了广泛应用。
本文旨在研究迭代学习控制算法的原理及其在机械臂中的应用,以期为相关领域的研究和应用提供参考。
二、迭代学习控制算法研究1. 算法原理迭代学习控制算法是一种基于迭代思想的优化控制方法,通过多次迭代过程,使系统逐渐逼近理想的控制效果。
其基本原理是在每个迭代周期内,根据系统当前状态和期望状态之间的误差,调整控制输入,使系统在下一次迭代中达到更接近期望状态的效果。
2. 算法特点迭代学习控制算法具有以下特点:一是针对重复性任务进行优化,适用于机械臂等需要多次执行相同或相似任务的场景;二是通过多次迭代逐渐逼近理想控制效果,具有较好的鲁棒性和适应性;三是算法实现简单,易于与其他控制系统集成。
三、迭代学习控制在机械臂中的应用1. 机械臂控制系统概述机械臂是一种典型的重复性任务执行机构,需要高精度的位置和姿态控制。
传统的机械臂控制系统主要采用基于模型的控制方法,但在实际运行中往往受到模型不确定性、外界干扰等因素的影响,导致控制效果不理想。
而迭代学习控制算法可以有效地解决这些问题。
2. 迭代学习控制在机械臂中的应用实例以一个典型的工业机械臂为例,采用迭代学习控制算法对机械臂进行控制。
首先,根据任务需求设定期望轨迹;然后,通过迭代学习控制算法计算控制输入,使机械臂逐渐逼近期望轨迹;最后,通过传感器实时监测机械臂的状态,将实际轨迹与期望轨迹进行比较,调整控制输入,使机械臂在下一次迭代中达到更接近期望轨迹的效果。
在实际应用中,迭代学习控制算法可以根据机械臂的具体任务和要求进行定制化设计。
例如,针对不同类型和规格的机械臂,可以调整算法的参数和结构,以适应不同的控制需求。
一种单关节机械臂的自适应滑模迭代学习控制方法[发明专利]
![一种单关节机械臂的自适应滑模迭代学习控制方法[发明专利]](https://img.taocdn.com/s3/m/ffdc3c2008a1284ac85043f6.png)
专利名称:一种单关节机械臂的自适应滑模迭代学习控制方法专利类型:发明专利
发明人:丁健
申请号:CN201910970712.9
申请日:20191013
公开号:CN110842913A
公开日:
20200228
专利内容由知识产权出版社提供
摘要:本发明公开了一种单关节机械臂的自适应滑模迭代学习控制方法,旨在提供一种以一类重复运行的单关节机械臂为控制对象的自适应滑模迭代学习控制方法,其技术方案要点是,包括如下步骤:S1、建立单关节机械臂的动力学方程;S2、建立重复运行单关节机械臂的连续状态空间方程;S3、设计自适应滑模迭代学习控制器;S4、分析闭环控制系统误差收敛性。
申请人:无锡职业技术学院
地址:214000 江苏省无锡市滨湖区高浪西路1600号
国籍:CN
代理机构:无锡万里知识产权代理事务所(特殊普通合伙)
代理人:李翀
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 5期 ( 第 14期 ) 总 7 21 0 2年 l O月
机 械 工 程 与 自 动 化
ME CHANI CAI ENGI NEE NG & AUT( M ATI ) RI ) (N
No. 5 (c . ) t
文 章 编 号 :6 26 1 (0 2 0— 18 0 1 7— 4 3 2 1 )5 0 5— 3
() (女 一 2 , ^ 为 对 称 矩 阵 , X ・ 1 q ) C( 西 ) 且
其 中: k为迭 代 次数 , ∈Z ()西 () l £分 别 为 k +; 、 £ 、 () 第 k次迭代 时 的关节 角位移 、 角速度及 角加 速度 , ( 、 )
收 稿 日期 :2 1— 32 ;修 回 日期 :2 1— 4 2 0 2 0 —0 0 20 — 0
令 () 一 () q () 则 () J £ 一奇 () £- 女 £ , ^ £ 一西 () ^ £ ,
考 虑有 限时 间 区间 t o T 内 , 时 变干 扰 的 n ∈E , 3 带
自由度 刚性 机械 臂 , 用 L g a ga 应 a rn in方 法 建立 其 动力 学 方程 如下 :
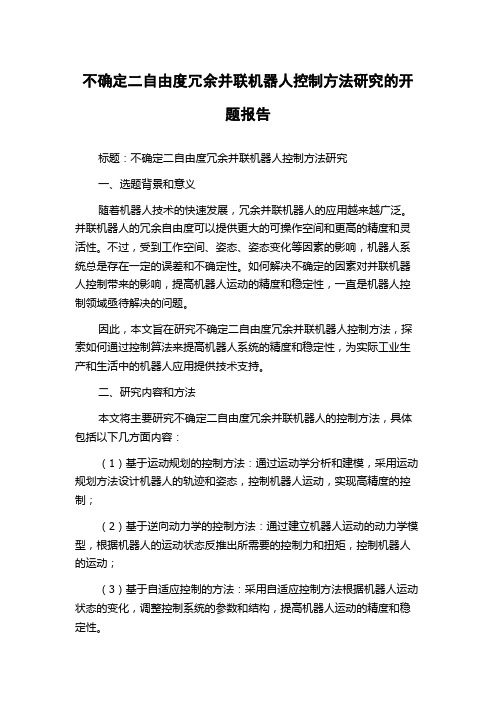
1 乒 乓 球 机 械 臂 系统 描 述
S o de : h ul r 3O DF
/一 ,
图 1 乒 乓 球 机 械 臂 结 构 衙 图
图 1为乒乓球 机 械 臂 的 结构 简 图, 机 械 臂共 有 该 7个 自 由度 , 肩部 、 部 、 其 肘 腕部 分 别 有 3 1 3个 自由 、、 度, 采用 pth r1 a 结构 形式[ i — ol c —y w 。
冗 余 自由度 仿 人 机 械 臂 自适 应迭 代 学 习控 制研 究
朱 海 燕 ,吴根 忠
( 浙江 工 业 大 学 信 息 工 程 学 院 ,浙 江 杭 州 3 0 2 ) 1 0 3
摘 要 :在 深 入 研 究 自适 应 迭代 学 习控 制 理论 、 七 自由 度 乒 乓球 机 械 臂 动 力 学模 型 及 轨 迹 规 划 的 基 础 上 , 提 出 将 改进 后 的 自适 应 迭 代 学 习控 制 算 法 运 用 到 带 有 重复 时变 干 扰 的 冗 余 自 由度 机械 臂 上 。该 控 制 系统 旨在 实 现
为实现 控制 目标 , 定 初 始值 满 足 ( )= ( ) , 假 t: : t 一0
且 该机 械臂 模型具 有 如下特性 [ : 6 ]
M( t ) ^ t + C( ^ t , ^ t ) ( )+ q ( ) ( ) q () 奇 ( ) 西 t
G(女£ ) q ( ) = ( ) d ( ) 。 … … … … … … … … … £十 f () 1
两大 目标 :一 是 使 乒 乓 球 机 械 臂 准 确 快 速地 跟 踪 参考 轨 迹 并在 末 点达 到 指 定 的 击球 速 度 ;二 是 引 入 饱 和 函数
减 小 输 入 转 矩 的 抖 振 。L au o y p n v理 论 分 析 及 MA AB 仿 真 验 证 了 整 个 控 制 系 统 的 有 效 性 : 当 迭 代 次 数 增 TL 加 时 ,跟 踪 误 差 关 于 有 限 时间 区 间 内一 致 收 敛 到 零 ;加 快 迭代 学 习 的 收 敛速 度 ,并 消 除抖 振 。 关 键 词 :七 自 由度 ; 乒 乓 球 机 械 臂 ; 自适 应 迭代 学 习控 制 ;饱 和 函数
假 设各 关节 角位 移及 角速 度 可测 , 目标 是 通 过 则 参 数 自适 应 学 习 , 得 相应 的控 制输 入 ( ) 获 f 以保 证
q () 西 () 、 随着 迭代 次 数增 加 而关 于 t O 了 一 致 ∈[ , 、 ] 收敛 到参考 信号 q () 。 J £ 和西 ()
仿 人机 器人 研发 的最终 目标 是 服 务 于人 类 , 于 由
作 业任 务 的不 同 , 仿 人机 械 臂 的要 求 也不 一 样 。本 对 文 以具 有冗余 自由度 ( 自由度 ) 七 的乒 乓球机 械臂 为研 究 对象 , 机械臂 能更 容易 地避 开障 碍物 , 有较 大 的 该 具 工 作空 间 , 以更 灵 活 地 实现 各 种 击球 动 作 [ 。但 同 可 1 ] 时 该机 械臂 必须 准确快 速 地击 中 目标 , 因此 , 有效 的控 制 算法 设计 是乒 乓球 机械 臂研发 的关 键技术 。 近 年来 , 人们把 自适 应控 制 与迭 代控 制 相结 合 , 估 计 系统 中不确 定常值或时变 的参数 , 分利用 系统 已知 充 的结 构或参数 信息设计控制输 入 , 该方 法能有 效解决 非 线性 系统控制 问题 , 并能获得更快 的收敛速度[ ] 2 。 。 本 文 首先针 对未 建模 动态及 未知 干扰 引起 的控制 信 号抖 振 问题进 行 自适 应 迭代 学 习算 法 改进 , 以饱 并 和 函数 代替 以往 的符 号 函数 ; 然后 将 改 进 后 的控 制 算 法 应用 到冗 余 自由度乒 乓球 机械 臂 的控制 中 。