解--电流调节器的设计
《电力拖动自动控制系统》习题解答(前三章)

《电力拖动自动控制系统》部分习题解答第一章1。
什么叫调速范围、静差率?它们之间有什么关系?怎样才能扩大调速范围? 答:①调速范围——电动机在额定负载下调速时,允许的最高转速max n 与最低转速minn 之比叫做调速范围,用D 表示,即min max n nD =②静差率——当系统在某一转速下运行时,负载由理想空载增加到额定值所对应的转速降落N n ∆与理想空载转速0n 之比,称作静差率S ,即0N n nS ∆=③直流变压调速系统中调速范围、静差率和额定速降之间的关系为)1(s n s n D N N -∆=④采用闭环控制方式,使转速降落N n ∆能够大幅度下降,才能保证在静差率S 不变的前提下扩大调速范围.2。
某一调速系统,测得的最高转速特性为n 0max =1500 r/min ,带额定负载时的速降N n ∆=15 r/min ,最低速特性为n 0min =100 r/min,额定速降不变,试问系统能达到的调速范围有多大?系统允许的静差率是多少?解:已知N n ∆=15 r/min,有n max =n 0max -N n ∆=1500 r/min -15 r/min =1485 r/min n min =n 0min -N n ∆=100 r/min -15 r/min =85 r/min 于是调速范围47.17851585minmax ===n n D静差率%15%10010015%100min0=⨯=⨯∆=n n s N答:系统能达到的调速范围是17。
47;允许的静差率是15%. 3。
为什么加负载后直流电动机的转速会降低,它的实质是什么?答:当负载电流增大后,电枢电阻上压降增大,使E 减小,导致转速n 必然下降.实质是电枢电阻的存在导致压降增大.4。
某调速系统的调速范围是1500 ~ 150 r/min,要求静差率为s =2% ,那么系统允许的静态速降是多少?如果开环系统的静态速降是100 r/min ,则闭环系统的开环放大系数应有多大?解:①已知101501500==D ,又)1(s n s n D N N -∆=06.3)02.01(1002.01500)1(N N =-⨯=-=∆s D s n n r/min也可以这样计算n n n n n s NNN ∆+∆=∆=min 0 min r/06.302.0102.01501min N =-⨯=-=∆s s n n ②因为 K1op cl +∆=∆n n所以 68.31106.31001K clop =-=-∆∆=n n答:要求静差率为s =2%时,系统允许的静态速降是3.06r/min ;如果开环系统的静态速降是100 r/min ,则闭环系统的开环放大系数应有31。
电力拖动自动控制系统-运动控制系统习题解答第4、5章
习题四4.1双闭环调速系统的ASR 和ACR 均为PI 调节器,设系统最大给定电压*nmU =15V ,转速调节器限幅值为*im U =15V , n N =1500r/min ,N I =20A ,电流过载倍数为2,电枢回路总电阻R =2Ω,s K =20,e C =0.127V·min/r ,求:(1)当系统稳定运行在*n U =5V ,dL I =10A 时,系统的n 、n U 、*i U 、i U 和c U 各为多少?(2)当电动机负载过大而堵转时,*i U 和c U 各为多少?解: (1)150.01min/1500/minnm N U VV r n r α=== 5500/min 0.01min/nU Vn r V rα===*150.375/40im dm U V V A I Aβ===*0.37510 3.75i d U I V β==⨯= 0.37510 3.75i d U I V β==⨯=0.1275001024.17520e d c s C n I R U V K +⨯+⨯=== (2)堵转时,V I U dm i 15*==β, 0.1270402420e d c s C n I R U V K +⨯+⨯=== 4.2 在转速、电流双闭环调速系统中,两个调节器ASR ,ACR 均采用PI 调节器。
已知参数:电动机:N P =3.7kW ,N U =220V ,N I =20A ,N n =1000 r/min ,电枢回路总电阻R =1.5Ω,设cm im nmU U U ==** =8V ,电枢回路最大电流dm I =40A,电力电子变换器的放大系数s K =40。
试求:(1)电流反馈系数β和转速反馈系数α。
(2)当电动机在最高转速发生堵转时的,0d U c i i U U U ,,*值。
解:1)*80.32/40im dm U VV A I Aβ===80.008min/1000/minnm N U VV r n r α=== 2) 040 1.560d d dm U E I R I R V ∑∑=+⨯=⨯=⨯=这时: *8,0n n U V U ==,ASR 处于饱和,输出最大电流给定。
电力拖动自动控制系统课后习题答案全内含两份阮毅陈伯时完整版
电力拖动自动控制系统课后习题答案全内含两份阮毅陈伯时HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】电力拖动自动控制系统 课后习题答案{全,内含两份,二无一失}——运动控制系统第四版{上海大学 阮毅 陈伯时}1-1为什么PWM-电动机系统比晶闸管----电动机系统能够获得更好的动态性能?答:PWM 开关频率高,响应速度快,电流容易连续,系统频带宽,动态响应快,动态抗扰能力强。
1-2试分析有制动通路的不可逆PWM 变换器进行制动时,两个VT 是如何工作的?答:制动时,由于1g U 的脉冲变窄而导致d i 反向时,U g2变正,于是VT 2导通,VT 2导通,VT 1关断。
1-3调速范围和静差率的定义是什么?调速范围,静态速降和最小静差之间有什么关系为什么脱离了调速范围,要满足给定的静差率也就容易得多了答:生产机械要求电动机提供的最高转速max n 和最低转速min n 之比叫做调速范围,用字母D 表示,即:m inm ax n n D负载由理想空载增加到额定值时,所对应的转速降落N n ∆与理想空载转速min 0n 之比,称为系统的静差率S,即:min0n n s N ∆= 调速范围,静差速降和最小静差之间的关系为:由于在一定的N n 下,D 越大,m in n 越小N n ∆又一定,则S 变大。
所以,如果不考虑D ,则S 的调节也就会容易,1-4.某一调速系统,测得的最高转速特性为m in /1500max 0r n =,最低转速特性为m in /150min 0r n =,带额定负载的速度降落m in /15r n N =∆,且不同转速下额定速降N n ∆不变,试问系统能够达到的调速范围有多大系统允许的静差率是多大解1-5闭环调速系统的调速范围是1500----150r/min ,要求系统的静差S<=2%,那末系统允许的静态速降是多少如果开环系统的静态速降是100r/min 则闭环系统的开环放大倍数应有多大1,min /06.3%)21(10%21500)1(101501500min max r S D S n n n n D N =-⨯≤-=∆===则 2,7.31106.31001=-≥+=∆∆K K n n cl op则1-6某闭环调速系统的开环放大倍数为15时,额定负载下电动机的速降为8 r/min ,如果将开环放大倍数他提高到30,它的速降为多少在同样静差率要求下,调速范围可以扩大多少倍同样静差率的条件下调速范围与开环放大倍数加1成正比1-7某调速系统的调速范围D=20,额定转速min /1500r n =,开环转速降落min /240r n Nop =∆,若要求静差率由10%减少到5%则系统的开环增益将如何变化?解:原系统在调速范围D=20,最小转速为:min /75201500max min r D n n ===, 原系统在范围D=20,静差率为10%时,开环增益为:静差率10%时原系统的开环增益为: 1-8转速单环调速系统有那些特点改变给定电压能否改变电动机的转速为什么如果给定电压不变,调节测速反馈电压的分压比是否能够改变转速为什么如果测速发电机的励磁发生了变化,系统有无克服这种干扰的能力答:1)闭环调速系统可以比开环调速系统硬得多的稳态特性,从而在保证一定静差率的要求下,能够提高调速范围。
第三章 转速、电流反馈控制的直流调速系统(电力拖动自动控制系统)
2. V-M可逆直流调速系统中的环流问题
图4-11 α=β配合控制电路 GTF—正组触发装置 GTR—反组触发装置 AR—反号器
2. V-M可逆直流调速系统中的环流问题
图4-12 α=β配合控制特性
1. α=β配合控制的有环流可逆V-M系统
图4-13 α=β配合控制的三相零式反并联 可逆线路的瞬时脉动环流(==60° ) a)三相零式可逆线路和瞬时脉动环流回路 b)=60°时 整流电压波形 c)=60°(α =120°)时逆变电压 波形 d)瞬时电压差Δ和瞬时脉动环流波形
(3)低频段大惯性环节的近似处理
图3-17 低频段大惯性环节近似处理对频率特性的影响
(3)低频段大惯性环节的近似处理
图3-18 双闭环调速系统的动态结构图 —电流反馈滤波时间常数 —转速反馈滤波时间常数
1.电流调节器的设计
图3-19 电流环的动态结构图及其化简 a)忽略反电动势的动态影响 b)等效成单位负 反馈系统 c)小惯性环节近似处理
(2)恢复时间tv
1)概念清楚、易懂;
2)计算公式简明、好记; 3)不仅给出参数计算的公式,而且指明参数调整的方向; 4)能考虑饱和非线性控制的情况,同样给出简单的计算公式; 5)适用于各种可以简化成典型系统的反馈控制系统。
1.典型Ⅰ型系统
(1)动态跟随性能指标
(2)动态抗扰性能指标
1.典型Ⅰ型系统
图4-8 两组晶闸管可控整流装置反并联可逆线路
1. V-M可逆直流调速系统的主回路结构
图4-9 两组晶闸管反并联可逆V-M系统的正组整流和反组逆变状态 a)正组整流电动运行 b)反组逆变回馈制动 c)机械特性允许运行范围
2. V-M可逆直流调速系统中的环流问题
电力拖动自动控制系统-运动控制系统习题解答第4、5章
习题四4.1双闭环调速系统的ASR 和ACR 均为PI 调节器,设系统最大给定电压*nmU =15V ,转速调节器限幅值为*im U =15V , n N =1500r/min ,N I =20A ,电流过载倍数为2,电枢回路总电阻R =2Ω,s K =20,e C =0.127V·min/r ,求:(1)当系统稳定运行在*n U =5V ,dL I =10A 时,系统的n 、n U 、*i U 、i U 和c U 各为多少?(2)当电动机负载过大而堵转时,*i U 和c U 各为多少?解: (1)150.01min/1500/minnm N U VV r n r α=== 5500/min 0.01min/nU Vn r V rα===*150.375/40im dm U V V A I Aβ===*0.37510 3.75i d U I V β==⨯= 0.37510 3.75i d U I V β==⨯=0.1275001024.17520e d c s C n I R U V K +⨯+⨯=== (2)堵转时,V I U dm i 15*==β, 0.1270402420e d c s C n I R U V K +⨯+⨯=== 4.2 在转速、电流双闭环调速系统中,两个调节器ASR ,ACR 均采用PI 调节器。
已知参数:电动机:N P =3.7kW ,N U =220V ,N I =20A ,N n =1000 r/min ,电枢回路总电阻R =1.5Ω,设cm im nmU U U ==** =8V ,电枢回路最大电流dm I =40A,电力电子变换器的放大系数s K =40。
试求:(1)电流反馈系数β和转速反馈系数α。
(2)当电动机在最高转速发生堵转时的,0d U c i i U U U ,,*值。
解:1)*80.32/40im dm U VV A I Aβ===80.008min/1000/minnm N U VV r n r α=== 2) 040 1.560d d dm U E I R I R V ∑∑=+⨯=⨯=⨯=这时: *8,0n n U V U ==,ASR 处于饱和,输出最大电流给定。
电气工程综合设计题目

可控硅(SCR)的选择(续Ⅱ)
IAV
1.5
2
1.57
IT
n
K
n 为功率开关单元的并联 数
K SCR 并联均流系数,0.8 0.8
IT SCR 流过的电流有效值
直流电机电枢电感量的计算
La
19.1
2
C p
U额定 n额定 I额定
103
(mH)
C---补偿系数,有电枢反应补偿为0.1,无补偿为0.4
智能变流量恒压供水系统的设计
六、智能变流量恒压供水系统的设计 实验室能够提供的条件: 水箱系统 嵌入式计算机控制系统 PLC 常用接触器、继电器
电气工程综合设计的评分标准
课程设计成绩由三部分组成 实验成绩 仿真成绩 课程设计报告
实验成绩(30分)
考勤 10分 独立工作能力,工作主动性 10 实验报告 10分
电气工程综合设计的参考课题
二、可逆调速系统设计 电机参数与课程设计一同; 采用逻辑无环流或错位无环流进行设计 (参考上海大学,陈伯时,电力拖动控制系统)
电气工程综合设计的参考课题
三、三相交流异步鼠笼电机变频驱动系统设计 采用AD-DC-AC; AC/DC DC/AC Link电路设计、缓冲电路设计 开关器件:SCR、GTR 、 IGBT 、 MOSFET
Tn 2Ti Ton
转速调节器的设计(续Ⅰ)
2.选择转速调节器结构 按照工程实际,转速调节器(ASR,Automatic
Speed Regulator)按照典型Ⅱ型系统设计。 其传递函数
GASR s
GASR
s
Kn
n s n
自动控制系统习题答案
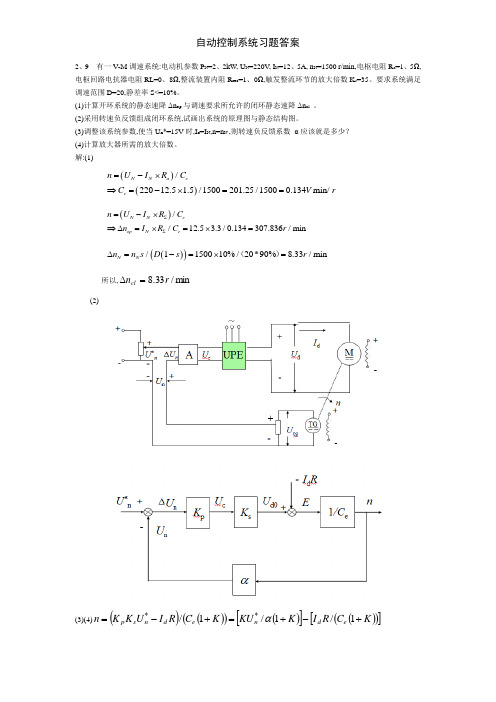
2、9 有一V-M 调速系统:电动机参数P N =2、2kW, U N =220V , I N =12、5A, n N =1500 r/min,电枢电阻R a =1、5Ω,电枢回路电抗器电阻RL=0、8Ω,整流装置内阻R rec =1、0Ω,触发整流环节的放大倍数K s =35。
要求系统满足调速范围D=20,静差率S<=10%。
(1)计算开环系统的静态速降Δn op 与调速要求所允许的闭环静态速降Δn cl 。
(2)采用转速负反馈组成闭环系统,试画出系统的原理图与静态结构图。
(3)调整该系统参数,使当U n *=15V 时,I d =I N ,n=n N ,则转速负反馈系数 α应该就是多少? (4)计算放大器所需的放大倍数。
解:(1)()()/22012.5 1.5/1500201.25/15000.134min/N N a ee n U I R C C V r=-⨯⇒=-⨯==()//12.5 3.3/0.134307.836/minN N eop N e n U I R C n I R C r ∑∑=-⨯⇒∆=⨯=⨯=()()/1150010%/20*90%8.33/min N N n n s D s r ∆=-=⨯=()所以,min/33.8r n cl =∆(2)(3)(4)()()()()[]()()[]K C R I K KU K C R I U K K ne d n e d n s p +-+=+-=**1/1/1/α()/1307.836/8.33135.955op cl K n n =∆∆-=-=()()()150035.95515/135.95512.5 3.3/0.134135.955α⎡⎤=⎡⨯+⎤-⨯+⎣⎦⎣⎦r V min/0096.0=⇒α可以求得,*35.955*0.13414.34*35*0.0096e p s K C K K α===也可以用粗略算法:n U U n nα=≈*,01.0150015*===n U n α/p e s K KC K α=,()35.9550.134/350.0113.76p K =⨯⨯=2、4 直流电动机为P N =74kW,UN=220V ,I N =378A,n N =1430r/min,Ra=0、023Ω。
电力拖动及其控制系统习题解
第1章 单环控制直流调速系统1-1 什么叫调速范围?什么叫静差率?调速范围与静态速降和最小静差率有什么关系?如何扩大调速范围?为什么?答:最高转速和最低转速之比叫做调速范围,m inm in m ax n nn n D N ==。
静差率是负载由理想空载增加到额定值所对应的转速降落Δn N 与理想空载转速n 0之比n n s ∆=。
调速范围、静差率和额定速降之间的关系是:(1)N N n sD n s =∆-只有设法减小静态速降Δn N 才能扩大调速范围,减小静差率,提高转速的稳定度。
1-2 在直流调速系统中,改变给定电压能否改变电动机的转速?为什么?若给定电压不变,调整反馈电压的分压比,是否能够改变转速?为什么?答:改变给定电压可以电动机的转速,因为系统对给定作用的变化唯命是从;调整反馈电压的分压比可以改变转速,因为*n U n α=。
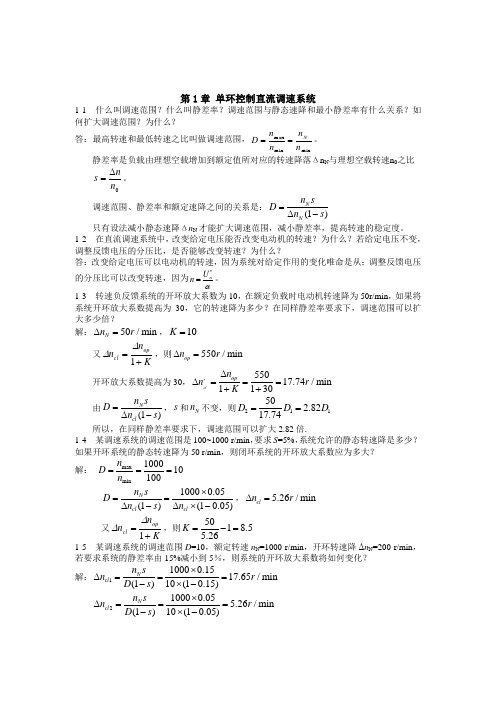
1-3 转速负反馈系统的开环放大系数为10,在额定负载时电动机转速降为50r/min ,如果将系统开环放大系数提高为30,它的转速降为多少?在同样静差率要求下,调速范围可以扩大多少倍?解:50/min N n r ∆=,10K =又Kn n opcl +=1∆∆,则550/min op n r ∆=开环放大系数提高为30,,55017.74/min 1130cl opn n r K ∆∆===++由(1)N cl n s D n s =∆-,s 和N n 不变,则211502.8217.74D D D ==所以,在同样静差率要求下,调速范围可以扩大2.82倍.1-4 某调速系统的调速范围是100~1000 r/min ,要求S =5%,系统允许的静态转速降是多少?如果开环系统的静态转速降为50 r/min ,则闭环系统的开环放大系数应为多大? 解: max min 100010100n D n === 10000.05(1)(10.05)N cl cl n s D n s n ⨯==∆-∆⨯-, 5.26/min cl n r ∆=又K n n op cl +=1∆∆,则5018.55.26K =-=1-5 某调速系统的调速范围D =10,额定转速n N =1000 r/min ,开环转速降Δn N =200 r/min ,若要求系统的静差率由15%减小到5%,则系统的开环放大系数将如何变化? 解:110000.1517.65/min (1)10(10.15)N cl n s n r D s ⨯∆===-⨯-210000.05 5.26/min (1)10(10.05)N cl n s n r D s ⨯∆===-⨯-12001110.3317.65opcl n K n ∆=-=-=∆,22001137.025.26op cl n K n ∆=-=-=∆2137.02 3.5810.33K K ==,开环放大系数扩大3.58倍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
E
s
7 396.4s
. E . . A ;
0.087s
ASR 的比例系数为 KM (4)检验近似条件 转速环截止频率为 w<M
/T UV
E
.
7 11.7
K Q τM
396.4 0.087s
/
7 34.5s
.
1) 电流环传递函数简化条件 @5 6 ∑0 件
@
/
.
s @
7 63.7s
.
? w<M 满足条 ? w<M 满
运动控制系统 期中考试
电控学院 自动化 0905 贺奎(0906050509)
解: 电流调节器的设计 (1) 确定时间常数 1)整流装置滞后时间常数T 。三相桥式电路的平均失控时间T =0.0017s。 2)流滤波时间常数T 。据题意给定T =0.002s。
3)电流环小时间常数之和T∑ 。按小时间常数近似处理T∑ = TS + Toi =0.0037s。 4)电磁时间常数T 。T
.
s
0.03s 。 C 0.18s
π
5)电力拖动系统机电时间常数T 。 T
C 0.132V min/r 所以T
C
(2)选择调节器结构 根据设计要求σ * 5%,并保证稳态电流无差,可按典I设计电流调节器。电 流环控制对象是双惯性型的, 因此可用 PI 调节器。 传递函数为W. 检查对电源电压的抗扰性能:5 6
. A
.
C ω< ? ω<
满足近似条件
3)校验电流环小时间常数近似处理条件
: 5D0
(5)计算调节器电阻和电容 取R
C R KR
0
.
.
E
满足近似条件
τ0 ;5K0
L
;
.
1.013 40kΩ F
0.75 10 I F
40kΩ 40.52kΩ
0.75uF 0.2uF
取 40 kΩ 取 0.2 uF
取 0.75 uF
5
∑0
/0 1τ0 23 4 τ0 2
。
.
.
7 8.11,其动态性能指标都可以接受。
(3)计算电流调节器参数 电流调节器超前时间常数:τ T 0.03s。 电流环开环增益:要求σ * 5%时,应取K T∑
K 0.5 T∑ K
0.5 0.0037 7 135.1s s
/6 τ0 /: β ; . .
0.5,因此
∆
1uF
∆_` 5∑ O M 5
取 1 uF
(6)校验转速超调量
σM ∆nQ
[
\ 1λ ] z4 ②
①
abT
联立①②得 求 综上所述
σM
2 81.2% 1.5 W.
. 1 . .
V c L.d L.V
;I
.
. A
;
7 8.31% C 10%
. 1 . A 23 4 . A 2
符合设计要
2
23 4
W.2
触发电路
控制电压 Uk 输出电路和反馈电路的部分电路
电源部分
整流部分和反馈电路的部分电路
Port5 所接晶 闸管晶闸管 Port4 所接同 步电源
VT1 -usc
VT2 Usb
整流各元件同步电压 VT3 VT4 -usa Usc
VT5 -usb
VT6 usa
系统结构框图为
Un
W.2
W.
K2 T N1 β
2)转速环小时间常数近似处理条件 @5 6 足条件 (5)τO
O
KO
.
s
7 38.7s
;
L
. A ;
11.7 40kΩ F
取R
0.185 10 I F 1 10 I F
YZ
40kΩ 468kΩ
0.185uF
取 470 kΩ
取 0.2 uF
M
;5KO
;
.
F W
的大小。触发电路的电阻电容需要根据所需的触发调节使得波形刚好是 所得要求的波形。 5)平波电抗器主要是为了,滤掉脉动电流,使电流平稳,因此选择大点 的平波电抗器。 6)转速环和电流环的放大器选用 LF353。
于是,ACR 的比例系数为
.
7 1.013
(4)校验近似条件 电流环戒指频率: ω< K 135.1s 1)校验晶闸管整流装置传递函数近似条件
5: .
s
7 196.1 ? ω< s s 7 40.82s 7 180.8s
满足近似条件
2)校验忽略反电动势变化对电流环动态影响条件
3 @5 @5
56
3 @ @
C
;
;
.
E
F
0.2 10 I F
转速调节器的设计 (1) 确定时间常数
1) 电流环等效时间常数 。 K T∑ 1 K
/6
0.5,则 2 0.0037s 0.0074s
2 T∑
2) 转速滤波时间常数T M。根据题意T M 0.01s。 3)转速环小时间常数T∑ M 。按小时间常数近似处理,取 1 T∑ M N T M 0.0074s N 0.01s 0.0174s K
(2)选择转速调节器结构 按照设计要求,选用 PI 调节器,其传递函数为 W.2
/O 1τO 23 4 τO 2
(3)计算转速调节器参数 按跟随和抗扰性能都较好的原则,取 h=5,则 ASR 的超前时间常数为 转速环开环增益 KQ
τM
R3
hT∑ M
5 0.0174s
I . I ; . .
ER 5∑ O 1R3 4β ERα 5∑ O 5
1 R1T s N 14
R T s
α
n
1 C
一、原理图实现直流调速系统的原理: (1) 通过实验调节 RP3 使得电流反馈系数即电流反馈电压与电枢电流之比为 0.05 (2) 通过实验调节 RP2 使得转速反馈系数即转速反馈电压与转速之比为 0.007 (3) 通过实验调节 R1 和 C1, 使得触发电路的 R1 和 C1 构成一个滞后π/3 的滤 波电路,这样由于余弦交点触发电路的输出φ相位与控制电压成比例关 系,从而控制整个整流电路的触发,从而控制电机的转速 (4) 接下来就是电机的控制运行 当电机刚启动时,由于电机转速变化很慢,几乎等于 0,此时转速 环饱和,电流环起作用,且电流环的给定达到最大值,使得电枢电流达 到最大值,此时得到最大转速加速度,电机以定加速度上升直至转速达 到最大值, 此时, 电动机仍旧因为转速环是积分环节使得电动机仍加速, 当转速超过给定值时,转速环节输入偏差为负,使它退出饱和,电枢电 流很快下降, 此时电流环节饱和, 转速环起作用。 从而使电机平稳运行。 当电机停止时与之相反。 (5) 整个控制过程均是由电流环的输出电压线性改变控制角,从而改变整流 装置的晶闸管的触发,进而改变输出平均电压 Ud。 二、每个元件选择依据 (1~1.5)ij 1.5 300k,开关频率为 200HZ 2)电源变压器选择:1:1 变压器,耐压 400V,耐流 150A. 3)触发的同步互感器用 12:1 的互感器。 4)转速环和电流环的电阻电容的大小在上面应经算出来了,直接用上面 1)晶闸管的选择:耐压(2~3)√6hE =1200V,最大电流