渐开线少齿差行星传动设计要点
渐开线行星齿轮传动设计

渐开线行星齿轮传动设计1. 简介渐开线行星齿轮传动是一种常用于机械传动系统中的齿轮结构,其特点是高效、紧凑和稳定。
本文将对渐开线行星齿轮传动的设计进行详细介绍,并探讨其在实际应用中的优势和适用范围。
2. 渐开线行星齿轮原理渐开线行星齿轮传动由太阳轮、行星轮和内啮合环组成。
太阳轮位于中心,行星轮围绕太阳轮旋转,并与内啮合环同时啮合。
当太阳轮作为输入端旋转时,内啮合环会带动输出端旋转,实现功率的传递。
渐开线行星齿轮传动的特点在于,每个行星轮都与内啮合环同时啮合,因此可以承受更大的负载和扭矩。
同时,由于各个组件之间的配合精度较高,使得该传动形式具有较高的精度和稳定性。
3. 渐开线齿形设计渐开线齿形是渐开线行星齿轮传动的关键设计要素之一。
渐开线齿形的设计需要满足以下几个方面的要求:3.1 齿轮啮合角度齿轮啮合角度是指太阳轮和行星轮之间的啮合角度。
为了实现平稳的传动,齿轮啮合角度通常选择为60°或120°,这样可以使得传动过程中的载荷均匀分布。
3.2 渐开线参数渐开线参数包括基圆半径、压力角和模数等。
基圆半径是指太阳轮和行星轮上用于计算齿形曲线的圆形半径,其大小直接影响到齿形曲线的形状。
压力角则决定了齿面上受力分布的情况,一般选择20°至30°之间。
模数是指每个齿所占用的长度,可以根据实际需求进行选择。
3.3 齿数比齿数比是指太阳轮和行星轮上各自的齿数之比。
通过调整齿数比,可以实现不同速比和扭矩输出。
一般来说,较大的齿数比可以提供更高的速比,而较小的齿数比则可以提供更大的扭矩输出。
4. 渐开线行星齿轮传动的优势渐开线行星齿轮传动相比其他传动形式具有以下几个优势:4.1 高效率渐开线行星齿轮传动的设计使得能量传递更加直接和有效,相比于其他传动形式如斜齿轮传动和带传动等,其效率更高。
4.2 紧凑结构渐开线行星齿轮传动采用了行星轮和内啮合环的结构,使得整个传动系统变得紧凑且占用空间较小。
关于少齿差行星齿轮传动设计的新思路

( )传 动 比 范 围 大 , 级 传 动 比 为 1 2 单 0~10 0 0
传 动相 比具有 承载能力大 、 积小 、 体 效率高 、 总质量 以上 。 轻 、 动 比大 、 传 噪声 小 、 可靠 性 高 、 寿命 长 、 于 维 修 便 () 3 结构 形 式多 , 用范 围广 。 由于其 输人 轴 与 应 等优 点 , 同时 还 可 以提 高其 承 载能力 。渐 开线 少齿 差 输 出轴 可在 同一轴 线 上 , 也可 以不 在 同一 轴 线上 , 所 行星齿轮传动 以其适用于一切功率、速度范 围和一 以能适 应各 种机 械 的需要 。 切工作条件, 到了世界各 国的广泛关 注, 受 成为世 界 () 4 结构 紧凑 、 积小 、 体 总质 量轻 。 由于 采用 内啮 各 国在机械传动方面的重点研究方向之一。但 由于 合 行 星传 动 , 以结 构紧凑 。 所 其计算过程复杂 , 目前还不能广泛被应用。本课题开 () 5 效率高。当传动 比为 1 ~ 0 时 , 0 20 效率提高 发 了一个计算过程 , 对于解决此问题十分有效 , 实 了8 且 O% 一 4%。效率 随 着传 动 比的增加 而 降低 。 9 际应 用 效果 良好 。 () 6 运转平稳、 噪音小、 承载能力大。 由于是 内啮 合传动 , 啮合齿轮一为凹齿 , 两 另一为 凸齿 , 两者 的 曲率中心在同一方向 , 曲率半径又接近相 等 , 因此接 1 课题 开发背景及 国内外研究现状 触 面积 大 , 齿 轮 的接 触强 度 大 为提 高 ; 因采用 断 使 又 11 课题 开发 背 景 . 齿制 , 齿 的弯 曲强度 也提 高 了。 轮 本课 题 开 发是 与某 阀 门制 造 商进 行 合作 的 。在 此外 , 在少齿差传动时 , 不是一对轮齿啮合 , 而是 使 用 原 设 计理 论 基 础上 ,该 企业 生产 出 的齿 轮 啮 合 3~9对 轮齿 同时 接触 受 力 , 以运 转 平 稳 、 所 噪音 小 , 极 差 , 常 由工 人凭 经 验进 行 打磨 , 全破 坏 了齿 轮 并且在 相 同的模数 情况 下 , 传递 力矩 比普 通 圆柱 齿 通 完 其 基于 以上特 点 , 到机 器人 的关 节 、 到 小 大 的渐开线曲面 , 结果在运行 中的振动和噪声都很 大, 轮减速 器大 。 以及 从要 求不 高 的农 用 、 品机 械 , 食 到 而且 传动 不稳 。因此 , 本课 题将 MA 1B和辅 助制 造 冶金矿 山机械 , TA 软件结合 , 开发新 的制造过程 , 发挥出该类机械机构 要求较高的印刷和国防工业都有应用实例 。 应 有 的优 势和 特点 。 13 国 内外研 究现 状 . ・ 12 少 齿差 行星 齿轮 传 动的特 点 . 当内啮合的两渐开线齿轮齿数差很小时 ,极 易 少齿差行星齿轮传动具有以下优点 : 产生各种干涉 ,因此在设计 过程 中选择齿轮几何参 () 1 加工方便 、 制造成本较低。渐开线少齿差传 数 的技术 十 分复 杂 。早 在 14 9 9年 , 苏 联 学 着 就从 前 动的特点是用普通 的渐开线齿轮刀具和齿轮机床就 理论上解决了实现一齿差传 动的几何计算问题 。但 可以加工齿轮 , 不需要特殊的刀具和专用设备 , 材料 直到 16 年代 以后 , 90 渐开线少齿差传动才得到迅速
少齿差行星齿轮传动原理

少齿差行星齿轮传动原理1.1 少齿差行星齿轮传动原理少齿差行星齿轮传动是行星齿轮传动中的一种。
由一个外齿轮与一个内齿轮组成一对内啮合齿轮副(它采用的是渐开线齿形,内外齿轮的齿数相差很小,简称为少齿差传动。
一般所讲的少齿差行星齿轮传动是专指渐开线少齿差行星齿轮传动而言的。
渐开线少齿差行星齿轮传动以其适用于一切功率、速度范围和一切T 作条件,受到了世界各国的广泛关注(成为世界各国在机械传动方面的重点研究方向之一。
1.1 2少齿差传动1.2 行星齿轮传动是动轴齿轮传动的一种主要方式,其最基本的形式是2K—H 型(即两个中心轮 a,b和个转臂 H),如图 l所示,传动比为 iaH=1+Zh/Zn.它演变出两种典型的少齿差行星齿轮传动形式 (如图 2所示:K—H—V行星齿轮传动如图2(a)所示 (基本构件为中心轮 b、转臂H和构件V,当中心轮 b固定,转臂H主动,构件V从动时,传动比为iHg= - Zg/(Zb-Zg).。
把构件V 固定(转臂H主动,中心轮 b输出(如图2(b)所示,其传动比iHb=Zb/(Zb-Zg)。
为少齿差行星齿轮传动机构实质是一个由平面四连杆机构和内啮合齿轮副组成的齿轮连杆机构。
通过对不同构件作不同限制,可以设计出多种少齿差行星齿轮传动结构形式。
1.1.3 少齿差行星齿轮传动的特点少齿差行星齿轮传动具有以下优点:(I)加工方便、制造成本较低渐开线少齿差传动的特点是用普通的渐开线齿轮刀具和齿轮机床就可以加工齿轮,不需要特殊的刀具与专用设备,材料也可采用普通齿轮材料料。
(2)传动比范围大,单级传动比为 10,1000以上。
(3)结构形式多样,应用范围广,由于其输入轴与输出轴可在同一轴线上,也可以不在同一轴线上,所以能适应各种机械的需要。
(4) 结构紧凑、体积小、重量轻,由于采用内啮合行星传动,所以结构紧凑;当传动比相等时,与同功率的普通圆柱齿轮减速器相比,体积和重量均可减少1/3,2,3。
渐开线少齿差行星传动的多目标优化设计
2 少齿差行 星传动系统 的优 化设计
21 设 计 变量 .
在 行 星 轮 和 内 齿 轮 齿 数 、 模 数 确 定 的 情 况
收稿 日期 :2 1-1-1 01 0 0 作者简介:林 尚飞 (9 8 1 8 一) ,男 ,浙江金华 人 , 硕士研 究生,研究方 向为机 械设计及理论 。 f2 第 3卷 3J 4 第5 期 2 1 —0 ( ) 0 2 5上
比较 优化 设 计 与常规 设 计 的结 果 可知 :
1 )优 化 后 的渐 开 线 少齿 差行 星 齿 轮 采 用 非 标 准齿 形 角 ,正变 位 ,超 短齿 ,并 且 是 正传 动 。 2 内外 齿轮 均采 用 了较 大 的正 变 位 ,齿 根厚 )
方 向
和 步长 因子 a , 使 下 一 个 迭 代 点
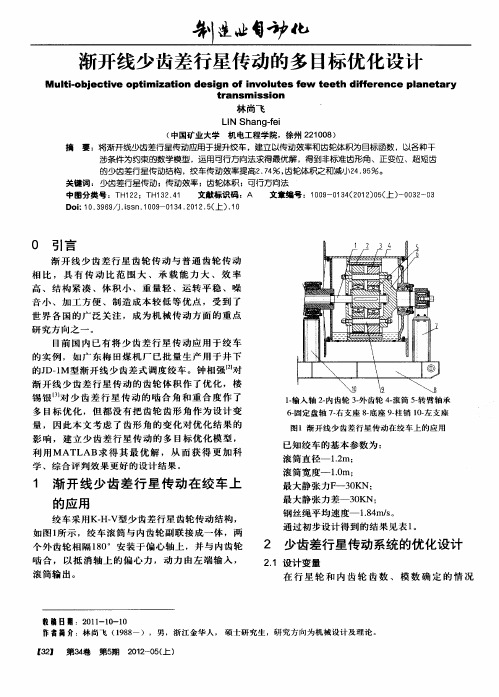
1输 入 轴 2内 齿 轮 3外 齿 轮 4滚 筒 5转 臂 轴 承 一 一 一 一 一 6固 定 盘 轴 7右 支座 8底 座 9柱 销 l一 支 座 一 . 一 一 0左 图 1 渐 开 线 少 齿 差 行 星 传 动 在 绞 车 上 的 应 用
多 目标 优 化 ,但 都 没 有 把 齿 轮 齿 形 角 作 为 设 计 变
l
匐 化
渐开 线少 齿差行星传 动的 多 目标优化设 计
Muli b e tv p i ia i nd sgno v u e e t e h dfe e c ln t r t- j c ie o tm z to e i fi olt sf w e t i r n e pa e a y o n f
的 实 例 ,如 广 东 梅 田煤 机 厂 已批 量 生 产 用 于 井 下 的J I 型渐 开 线 少 齿 差式 调 度 绞 车 。钟 相 副 D—M 对 渐 开 线 少齿 差 行 星 传 动 的齿 轮 体 积 作 了 优 化 ,楼 锡 银 对 少 齿 差 行 星 传 动 的 啮 合 角 和 重 合 度 作 了
渐开线少齿差行星传动的模糊可靠性优化设计

)去 el ( 一 xn a px , ( / 、- . 1 2 )
式 中 : 为应 力变 量 z 的对 数 均 值 ; 为 应 力 变量 z S
的对 数标 准差 .
与上 述对 应 的许 用弯 曲应力 作 为模糊 变 量处 理 , 模糊 性用 隶 属 函数来 表示 , 其 许用 应力 的模 糊隶 属 函数 可 用半梯 形 降 阶 函数 表 示较 为合 理 . 表 达 其 式 为
维普资讯
第2 1卷 第 2 期
V0 . .2 1 21 No
湖 北 工 业 大 学 学
报
20 年 O 06 4月
Apr 20 . 06
J u n lo b i i e st fT c n l g o r a fHu e Un v r i o e h o o y y
这一方 法.
口 ) 二三 (1 ( 一J z 口 <z≤口) () 2; 2
( > z .
l
口 ,。 ,口 为许 用应 力 , 可用 扩增 系数 法确 定 ;, 口 一 ,。 a
一
10 0 口z . 5- ( )为 隶 属 函 数 ( , 应力 对 许 用 值 的 隶 属
[ 摘
要]根 据 模 糊 分 析 和 运 用 可 靠 性 设 计 的基 本 理 论 , 合 最 优 化设 计 技 术 , 出 了 渐 开 线 少 齿 差 行 星 传 动 结 提
的模 糊 可 靠 性 优 化 设 计 方 法 , 考 虑 了全 部 变 量 的 随 机 性 和 离 散 性 约 束 条 件 中 含 有 模 糊 关 系 和 模 糊 可 靠 度 在 要 求 的情 况 下 , 以体 积 最 小 为 目标 建 立 了行 星 传 动 的模 糊 可 靠 性 优 化 设 计 数 学 模 型 , 给 出 了优 化 方 法 及 优 并
NGW型行星齿轮减速器-行星轮设计要点

目录一.绪论 (3)1.引言 (3)2.本文的主要内容 (3)二.拟定传动方案及相关参数 (4)1.机构简图的确定 (4)2.齿形与精度 (4)3.齿轮材料及其性能 (5)三.设计计算 (5)1.配齿数 (5)2.初步计算齿轮主要参数 (6)(1)按齿面接触强度计算太阳轮分度圆直径 (6)(2)按弯曲强度初算模数 (7)3.几何尺寸计算 (8)4.重合度计算 (9)5.啮合效率计算 (10)四.行星轮的的强度计算及强度校核 (11)1.强度计算 (11)2.疲劳强度校核 (15)1.外啮合 (15)2.内啮合 (19)3.安全系数校核 (20)五.零件图及装配图 (24)六.参考文献 (25)一.绪论1.引言渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。
渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置。
渐开线行星齿轮减速器所用的行星齿轮传动类型很多,按传动机构中齿轮的啮合方式分为:NGW、NW、NN、NGWN、ZU飞VGW、W.W等,其中的字母表示:N—内啮合,W—外啮合,G—内外啮合公用行星齿轮,ZU—锥齿轮。
NGW型行星齿轮传动机构的主要特点有:重量轻、体积小。
在相同条件下比硬齿面渐开线圆柱齿轮减速机重量减速轻1/2以上,体积缩小1/2—1/3;传动效率高;传动功率范围大,可由小于1千瓦到上万千瓦,且功率越大优点越突出,经济效益越高;装配型式多样,适用性广,运转平稳,噪音小;外齿轮为6级精度,内齿轮为7级精度,使用寿命一般均在十年以上。
因此NGW型渐开线行星齿轮传动已成为传动中应用最多、传递功率最大的一种行星齿轮传动。
2.本文的主要内容NGW型行星齿轮传动机构的传动原理:当高速轴由电动机驱动时,带动太阳轮回转,再带动行星轮转动,由于内齿圈固定不动,便驱动行星架作输出运动,行星轮在行星架上既作自转又作公转,以此同样的结构组成二级、三级或多级传动。
少齿差行星齿轮传动分析及应用
少齿差行星齿轮传动分析及应用摘要:少齿差行星齿轮传动由行星齿轮传动演变而来,由于行星齿轮副内外齿轮的齿数相差很少,因此简称少齿差传动,通常指渐开线少齿差行星齿轮传动。
少齿差轮系按传动形式可分为N型和NN型,其输出机构又设计成多种形式,文章分析轮系传动比的计算方法,对其典型结构的效率计算做了阐述,少齿差传动以其大传动比、小体积、轻重量、传动效率高等优点,在化工、轻工、冶金等机械设备中获得广泛应用。
关键词:少齿差传动;传动比;传动效率Abstract: the less tooth differenced planetary gear transmission of planetary gear transmission by evolved, by the planet gear pair of internal and external gear are very few number, so fewer tooth difference as transmission, usually refers to the involute less tooth differenced planetary gear transmission. Less tooth was sent by the transmission forms can be divided into N type and NN type, its export agencies and design into a variety of forms, this paper analyzes the calculation method of gear transmission ratio, the typical structure of the calculation efficiency paper and less tooth difference with its large transmission transmission, small volume, light weight, high transmission efficiency advantage, in the chemical industry, the light industry, metallurgy, and other machinery and equipment were widely available.Keywords: less tooth difference transmission; Transmission ratio; Transmission efficiency中图分类号:U463.212+.42 文献标识码:A文章编号:少齿差行星齿轮传动是由行星齿轮传动演变而来,是行星齿轮传动中的一种特殊的轮系。
浅谈渐开线少齿差行星齿轮传动的特点及发展前景

图 E
图 F
图 3 轴销输 出机构和浮动盘式结构
而 浮动 盘 式 结 构 较 简 单 , 图 3的 F图 , 用 如 采
传动 , 但浮 动盘本 身加 工要 求较 高 , 且其工 作效 率 而
和承载 能力 还缺乏 测 试数据 。
一
传 递平行 轴运 动 的浮动盘 机构 作为输 出机 构 。它 比
而齿数 不 同的两个 内齿 轮副组 成 。其 结构 如 图 2的 C图所示 , 由两 个 中心 轮 ( 内齿 轮 ) 即 和一个 行 星架
啮合齿 轮 副 。H 是 输 入轴 , 是 输 出轴 。 当 电动机 V 带动偏 心轴 转动 时 , 行星 齿轮 与 内齿 轮啮合 , 由于 内 齿轮 2固定 不动 , 迫使双 联行 星轮既绕 内齿 轮公转 ,
・
2 ・ 4
a" 用 F
汽
车
21 第 1 0 1年 期
★ 设 计 ・ 验 ・ 究 ★ 试 研
又绕 自身 中心 自传 , 带动 内齿轮 4输 出运 动 , 而达 从 到传 动 的 目的 。有 时 , 型 行 星 传 动 也 可设 计 成 NN 外 齿轮输 出的结构 形式 , 图 2的 D 图 。 如
W
图A 图 1 N型 少 齿 差行 星齿 轮 传 动
图B
1 2 NN型 少齿 差行星 齿轮传 动 .
( 即偏心 轴 ) 成两级 行星 传动 。 由其 中的齿 轮 1 组 及
3为双联 外齿轮 , 1与 2 3与 4分别 为两对少 齿差 内 ,
N 型行 星齿 轮传 动 可 以实 现 大 传 动 比传 动 , N 是一种 典型 的行 星齿 轮 传 动形 式 , 般 由模 数 相 同 一
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
渐开线少齿差行星传动设计要点作者中国七砂陆在潮摘要:本文介绍了渐开线少齿差行星传动的设计特点,给出了简化设计的条件和计算公式。
提出了在实际设计制造过程中可取的窍门和特别注意的关键点。
关键词:渐开线,少齿差,行星传动,设计,窍门The main points to design a planetary drivewith fewer differential involute gear teethAbstract:In this thesis,the characteristics to design a planetary drive with fewerdifferen-tial involute gear teeth have been introduced,and also show you the conditions& theformulas for the simplified design calculation.Furthermore,the knowhows and the keystrongpoints which should be kept in the process of practical design andmanufacturehave been put forward.Key word:Involute,fewer differential tooth,planetary drive,design,knowhow.渐开线少齿差行星减速器,是一种新型减速器。
其优点是结构紧凑,体积小、重量轻、传动比大、传动效率高、制造维修方便。
因此,应用越来越广。
但是由于其传动行式是内啮合行星齿轮传动,所以又产生了设计复杂,使不少希望自行设计制造者望而却步,严重影响普及应用。
前些年我厂自行设计制造了一台内齿轮输出的NN型(原称2N—N)少齿差行星减速器捲筒。
投入运行后效果很好。
通过这次实践,我总结出一套简化设计计算又不影响结果的公式,找到了一些可以放宽要求,甚至降低制造精度又不影响使用效果的窍门,根据这些简化公式和窍门,一般厂家设计人员完全可以根据需要充满信心的自行设计制造这种减速器。
因为实际的设计计算远不必象书本上介绍的那么复杂繁索,一般设备使用的减速器,其设计制造精度也没有必要那么高,我这么说绝不是要降低产品质量,而是强调:只要把握住设计要点,灵活运用,就一定可以设计制造出满意的减速器。
下面就将这些简化公式和窍门介绍给大家参考。
渐开线少齿差行星传动有两大特点,其优点是由此产生的,麻烦也是它带来的。
这两大特点是:行星齿轮传动和内啮合少齿差传动。
下面就针对这两大特点进行分析。
一:行星传动所带来的问题——速比计算较为复杂。
行星传动有一个回转的系杆,它是行星轮的中心。
这对习惯了定轴轮系设计计算的不少普通设计者来说,多少有点不大习惯。
其实采取相对运动的处理方法,在系统上加一个与系杆的回转速度大小相等、方向相反的运动,就把系统变成了定轴轮系。
如图一所示,就是一个内齿轮输出的NN型减速器的原理图。
对这种机构的速比计算方法如下:设系杆的输入速度是n H,各齿轮的齿数和转速分别是:Z1、Z2、Z3、Z4和N1、N2、N3、N4则:Z2N1-N H Z3N4-N H==Z1N2-N H Z4N3-N H注意到N1=0N2=N3简化可得:i=N H÷N4=Z2Z4÷(Z2Z4-Z1,Z3)……………(1)图一进一步分析可知:Z2,Z3是同轴的,Z1,Z4是同轴的。
因此,它们的中心距必须满足:A1,2=A3,4由于:A1,2=A01,2÷COSα1,2×COSα0A3,4=A03,4÷COSα3,4×COSα0根据无恻隙啮合方程式,上式的α1,2和α3,4由下式决定:invα1,2=(2tgα0×ξ∑1,2)÷(Z1-Z2)+invα0 (2)invα3,4=(2tgα0×ξ∑3,4)÷(Z3-Z4)+invα0 (3)式中:ξ∑1,2是齿轮1,2的总变位系数ξ∑3,4是齿轮3,4的总变位系数α1,2是齿轮1,2的啮合角α3,4是齿轮3,4的啮合角由上式可知:满足A1,2=A3,4的最省事的办法是令A01,2=A03,4,从而α1,2=α3,4,由于Z2=Z3是一体的,切两轮的直径不会相差太大,因此,可令两齿轮模数相同,从而决定Z1-Z2=Z4-Z3=d,进而再令Z1=Z3,则上式可化简为:i=N H÷N4=-Z2×Z4÷d…………(4)负号表示轮4和H的转向相反。
利用公式(4)解决速比的计算和齿轮齿数的选择,就大为简化和方便了。
二:少齿差内啮合带来的问题——干涉少齿差内啮传动带来的干涉有好几种,有渐开线干涉、过渡干涉、齿顶相碰和齿廓重叠干涉、径向干涉等。
但最常发生的是齿廓重叠干涉,也是计算繁琐的关键环节,在实际设计中主要是解决这一问题。
如图二所示,直观就能看出,这样的外齿轮是放不进内齿轮中去的。
更不用说进行啮合传动了。
这种情况就叫齿廓重叠干涉。
认真分析图示的情况,可以看出消除这种干涉的方法有二:一是减少齿顶高,从齿高方向消除干涉。
二是选用较大的变位系数,增加内齿轮齿间和减少外齿轮齿顶宽,从齿宽的方向上消除干涉。
第一种方法将带来重叠系数的减少,第二种方法又减少了齿尖强度。
因此,必须把二者结合起来,适当调配,达到最优设计。
这是内啮合齿轮传动的设计关键,也是最困难、最繁杂的地方。
合理选择变位系数和齿顶高系数,保证不发生干涉,使重叠系数大于1,同时保证足够的齿尖强度,这就是设计计算的任务。
如何选择变位系数呢?简单分析可以知道,内外齿轮的齿数差愈少,愈容易发生重叠干涉。
因此,ξ∑的数就会愈大,根据上述公式(2)可知 ξ∑增加和Z 1—Z 2的减少,都使inv α1,2增大,从而可以看出一条规律,内啮合传动的两齿数差愈少,啮合角则愈大,有关资料给出了这一规律的数值范围如下表:啮合角540——560380——400280——300260——280齿数差D=1D=2D=3D=4有了这个表的大致范围,我们就可以较方便的进行选择了。
具体方法是:(1)由齿数差选一个啮合角;(2)由啮合角根据公式(2)(3)算出ξ∑1,2和ξ∑3,4;(3)选定一个ξ1,计算出ξ2=ξ∑-ξ1。
余下的就是校验了。
校验主要包括三个方面,顺序如下:(一)先作齿面重叠干涉校验,其公式是:G S =Z 1(inv αd1+δ1)-Z 2(inv αd2+δ)+(Z 2-z 1)×inv α>0 (5)其中αd 是对应下标的齿顶压力角。
COS αd1=d j ÷D d1=mZ COS α0÷(mz ±2h d1) (6)式中h d 为齿顶高,负号用于内齿轮h d =m(f +ξ1-σ) (7)σ=ξ∑-λ (8)λ=(A -A 0)÷m (9)COS αd 由(6),(7),(8),(9)式确定(5)式中另一个未知数δ的计算方法如下:COS δ1=(R 2d2-R 2d1-A 2)÷2R d1÷A……….(10)图二COSδ2=(R2d2-R2d1-A2)÷2R d2÷A (11)R d是顶圆半径。
(二)其次作重叠系数的校验,其公式为:ε=1÷2π×[Z1(tgαd1-tgα)-Z2(tgαd2-tgα)]>1 (12)若校验的结果是如下情况,则作相应处理。
1:G S>0,ε<1。
处理:减少ξ重新验算。
2:G S<0,ε>1。
处理:增加ξ重新验算。
3:G S<0,ε<1。
处理:加大啮合角α的值,重新算出ξ的值,按上述步骤重新验算。
4:G S>0,ε>1。
合格。
达到设计要求。
上述过程可能要进行多次,这就是该设计的困难和繁杂所在。
好在现在的设计计算工具先进了,这样的验算实际并不复杂。
由于加大α以后会使径向力增加,所以应在满足上述条件下尽量减少α,因此,只要使Gs稍微大于0,ε约等于1就可以了,一定不要过大。
(三)再次,干涉现象不单会发生在制成后的传动中,由于在内齿轮的加工过程中,是插齿刀和内齿轮的展成运动,所以在加工时也可能发生“干涉”,这表现为内齿轮切顶(渐开线干涉)和切入切顶(径向干涉)。
因此也必须校验,其公式是:Z c≥Z2(1-tgαd2÷tgαc2) (13)式中Z c为插齿刀齿数Z2为内齿轮齿数αd2为内齿轮顶圆压力角αc2为插齿刀与内齿轮的啮合角从这个式子可以看出刀的齿数多一点为好,但也不能太多,太多又会发生齿廓重叠干涉和径向干涉。
由于在插齿过程中有径向退刀运动,因此,径向干涉一定要进行校验。
校验式如下:Sin-1√{[1-(CosαdC÷Cosαd2)2]÷[1-(Z C÷Z2)2]}+invαdC-invαC2-Z÷Z{Sin-1√{[(Cos d2÷Cos dc)2-1]÷[(Z2÷Z C)2-1]}+invαd2-invαC2}≥0 (14)式中αdc为插齿刀的齿顶圆压力角αC2为插齿刀与内齿轮的啮合角在计算αC2的值时要根据公式(2),要掌握插齿刀的有关数据,特别是要注意其变位系数ξ刀。
一般来说只要插齿刀的齿数略少于与该内齿轮的啮合的外齿轮齿数就不会发生干涉,故也可以不作上述校验。
但是,为避免在加工中出现故障,还是要求径向干涉一定要进行校验为好。
三,对少齿差行星传动的综合分析:由上面一,二的分析和计算,使我们可以对此种减速器有一个基本的了解,并能作几何计算及参数选择计算了.下面再就其他问题结合实际应用过程综合分析,同时给出实际设计制造过程中可取的窍门和注意事项.1:关于重叠系数ε:虽然理论上要求ε>1,而且为了传动平稳,对于传动精度要求高的,还要求ε>1.3以上。
但实际上由于是少齿差内啮合传动,在啮合点附近,有几对齿啮合或既将进入啮合的齿相距极近,考虑到齿的弹性变形,在实际受力时,它们实际已经进入啮合。
因此,在重负荷低速传动情况下,就是ε稍小于1,也是可以正常传动的。
这给了我们一个启示,那就是如果实际作出的一对齿轮,由于设计和制造精度引发了干涉(在设计时当然还是要保证ε>1),就可以采取简单的去掉一点齿顶高的办法来处理,而不必担心因此会引起重叠系数减少进而发生断续运转。
2:由于上面分析的原因,还带来另一个好处:那就是过载能力极大。
这给我们的强度计算带来了方便。
因为,内啮合的强度计算也是比较麻烦的,(这就不多介绍了)有了这一条,一般有点计算误差,(指计算精度引起的误差,而非设计计算错误)也不必担心了。