低功耗、快速稳定恒温晶振
基于小型化超低短稳高稳定度恒温晶振的设计

恒温晶振的电路设计分为振荡电路(主振电路)和控温电路 两个部分。
2.1 主振电路的设计 振荡电路的设计有串联晶体振荡器和并联晶体振荡器两种。
并联型晶体谐振器电路是晶体接在反馈网络中,并与电路中其他 电抗元件构成并联谐振回路 ;在串联型晶体电路中,晶体与负载 电容串联,工作时呈纯阻性。为了便于可生产性和调试方便等原 因,本文采用了并联振荡电路的共集柯尔匹兹电路形式,主振电 路图见图 1。
D 专题 IGITCW 技术 Special Technologyห้องสมุดไป่ตู้
基于小型化超低短稳高稳定度恒温晶振的设计
郭 旺
(中国电子科技集团公司第五十四研究所,石家庄 050000)
摘要 :本文主要介绍了一款 36×27×13mm3 封装的小型化超低秒高稳定的恒温晶振的设计。传统的高稳定度恒温晶振其温度稳定
度和老化特性都能够做到很好,比如温度特性能够达到 ±0.1ppb(40℃ ~85℃),老化特性能够达到 0.1ppb/ 日。但是其短期稳定度(秒
参考文献
[1] 赵声衡、赵英 . 晶体振荡器 . 北京 :科学出版社,2008. [2] 赵声衡 . 精密恒温槽原理 . 长沙 :湖南科学技术出版社,1991. [3] LEESON D B.A simple model of feedback oscillator noise spectrum[J].
3 测试结果
由于本文设计的产品短稳已经达到了 5*10e-13 的数量级,普 通设备的测量精度已经无法达到要求。所以建议采用测试精度较 高的测试设备和参考源,如本次实验的测试设备为 5125A,参考 源为高稳定度的 DBV-10M 参考源。经过前期的实验和参数的调 整,测试结果如下图 2 和图 3 :
从瞬态到全域稳定度的测量方法进步
从瞬态到全域稳定度的测量方法进步白丽娜;王一妃;周渭;黄李贝;王远【摘要】将边沿效应推广到数字领域,利用数字边沿结合数字鉴相算法得到瞬态频率稳定度,将瞬态稳定度从10-4每百纳秒提高到10-5每百纳秒,解决了模拟相位重合检测技术存在的对硬件线路要求过高、设备漂移、无法扩展到全域稳定度等问题.数字方式可在瞬态稳定度的基础上扩展到短期及中、长期稳定度,从根源和影响效果等方面对频率源相位噪声进行更全面的描述.【期刊名称】《西安电子科技大学学报(自然科学版)》【年(卷),期】2019(046)003【总页数】6页(P8-13)【关键词】瞬态稳定度;相位重合检测;数字边沿效应【作者】白丽娜;王一妃;周渭;黄李贝;王远【作者单位】西安电子科技大学机电工程学院,陕西西安 710071;西安电子科技大学机电工程学院,陕西西安 710071;西安电子科技大学机电工程学院,陕西西安710071;西安电子科技大学机电工程学院,陕西西安 710071;西安电子科技大学机电工程学院,陕西西安 710071【正文语种】中文【中图分类】TM935.12传统的频率稳定度测量将重点放在对象的短、长期频率稳定度方面,忽略了测量对象的瞬态稳定度,导致在时域方面,单边带相位噪声测量中远端相位噪声没有可以实行的对应时域测量方法。
在模拟平台下对信号频率稳定度的测量,只能得到毫秒及以上量级的频率稳定度,无法得到更短时间的高精度频率稳定度指标,并存在对噪声单点过零检测较为敏感、对线路性能要求严格、线路分辨率有限等问题[1]。
目前国内外测量频率稳定度最常用的方法是双混时差测量,此方法通过对比信号与公共振荡器混频放大相位频率变化及两路差拍信号同时测量相位差抵消噪声影响两种技术手段来保证测量精度,但存在公共振荡器噪声和器件性能的影响。
由于双混时差通过双混频引入测量倍增降低了实际测量频率,在瞬态稳定度测量方面存在一定的局限。
在通讯、雷达、导航定位等诸多与军事相关的领域,信号的远载频相位噪声以及瞬态频率稳定度指标是频率信号中影响通讯质量、雷达捕捉目标的细节及导航定位细节精度的重要因素,因此发展这方面的高分辨率技术是关键而迫切的[2-11]。
基于北斗授时的时钟驯服系统设计
基于北斗授时的时钟驯服系统设计刘铁强;霍婧【摘要】针对用时设备对时频信号精度越来越高的需求,设计了一种基于北斗授时的时钟驯服系统.利用北斗授时秒脉冲(1 pps)长期稳定性高的特点,结合恒温晶振(OCXO)优良的短期稳特性,使用时间数字转换器(TDC)测量OCXO与北斗授时1 pps时差信息,并对时差结果进行数字滤波处理,根据时差结果对OCXO进行实时控制,获得高精度的时间频率信号以满足用时设备的需求.测试结果表明,驯服后的OCXO频率准确度优于1×10-12天,授时精度优于30 ns.【期刊名称】《无线电工程》【年(卷),期】2018(048)007【总页数】4页(P569-572)【关键词】北斗授时;时钟驯服;时间数字转换器;恒温晶振【作者】刘铁强;霍婧【作者单位】中国电子科技集团公司第五十四研究所, 河北石家庄 050081;卫星导航系统与装备技术国家重点实验室, 河北石家庄 050081;中国电子科技集团公司第五十四研究所, 河北石家庄 050081【正文语种】中文【中图分类】TN2530 引言时间是物理学中7个基本物理量之一,与人们的日常生活、科技发展密切相关。
在测控与通信系统中,随着技术探索的进步,对时间频率基准源的精度要求越来越高。
高精度的频率源(如氢原子钟、铯原子钟和铷原子钟)能够为测控与通信系统提供高精度的时间频率基准,但价格高,难以普及使用[1]。
常用的OCXO等二级频标价格低廉,体积较小,但受晶体老化和温度等因素的影响,其输出频率漂移率较大,约为5×10-8/月,长期稳定度较差,很难满足测控与通信系统需求[2]。
随着我国北斗卫星导航系统的发展[3],北斗授时在军民各领域中得到了广泛应用,本文利用北斗授时的特点对本地OCXO进行驯服,能够有效解决OCXO由于老化以及长期稳定性差带来频率漂移等问题。
利用北斗授时校准本地OCXO,需要测量北斗授时1 pps信号与OCXO分频产生1 pps信号的时间差,通过时间差计算频率偏差,再根据频率偏差改变OCXO的压控电压实现对OCXO的校准。
晶振主要参数

晶振主要参数介绍晶振是一种被广泛应用于电子设备中的关键元件,它能够产生一定频率的交变电场,用于驱动数字系统的时钟信号。
晶振的主要参数是指影响晶振性能和稳定性的关键指标,包括频率稳定性、频率漂移、负载能力等。
本文将详细介绍晶振的主要参数,以及这些参数对晶振性能的影响。
频率稳定性频率稳定性是晶振的一个重要参数,它指的是晶振输出频率的稳定程度。
频率稳定性可以通过频率偏差来描述,即晶振输出频率与额定频率之间的差异。
频率稳定性的单位通常为ppm(百万分之一)。
晶振的频率稳定性取决于晶振内部的谐振器结构和工艺技术。
一般来说,晶振的频率稳定性越高,其输出的时钟信号越准确可靠。
频率漂移频率漂移是指晶振输出频率随环境温度变化而发生的变化。
由于晶体的物理特性受温度的影响,晶振的频率也会随温度的变化而发生漂移。
频率漂移通常用ppm/℃(百万分之一/摄氏度)来表示,它可以通过温度系数来计算,即单位温度变化下频率发生的变化。
频率漂移对于某些应用场合来说非常重要,特别是对于需要高精度时钟信号的系统。
原因频率漂移的主要原因是晶体振荡器内部晶体的温度特性。
晶体振荡器中的振荡回路包含晶体谐振器,而晶体谐振器的频率与其温度特性密切相关。
晶体振荡器在工作过程中会产生一定的热量,这将会影响晶体振荡器的温度,从而导致频率漂移。
不同品牌和型号的晶振在频率漂移方面表现也有所不同,所以在选择晶振时需要考虑其频率漂移特性。
解决方法为了解决频率漂移问题,可以采取以下方法:1.选择温度补偿晶振:温度补偿晶振是一种内部集成了温度补偿电路的晶振,它能够根据温度变化自动调整其输出频率,从而达到抵消频率漂移的效果。
2.冷却措施:对于一些特殊应用场合,可以采取冷却措施来降低晶振的工作温度,从而减小频率漂移。
负载能力负载能力是晶振的另一个重要参数,它指的是晶振能够驱动的最大负载电容。
晶振内部的谐振器结构会产生振荡信号,这个信号需要通过负载电容来加载,负载能力可以用来描述晶振输出信号的负载能力。
试析新型二次补偿恒温-温补晶振的设计
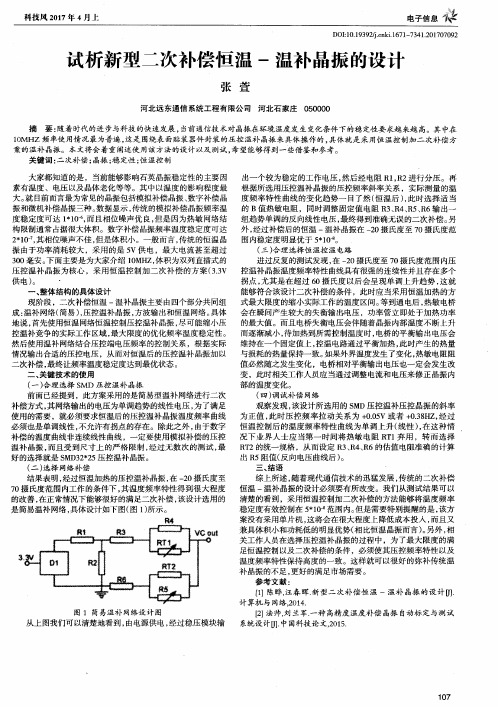
摘 要: 随着 时代的进步与科技 的快速发展 , 当前 通信技术对 晶振在环境温度发生变化 条件 下的稳定性要求越来越 高。其 中在 1 0 MHZ频率使用情况最为普遍 , 这是 围绕表 面贴装器件封装 的压控 温补 晶振 来具体操 作的 , 具体就是采 用恒温控制加二 次补 偿方 案的温补晶振。本文将会 着重 阐述使用该方法的设计 以及测试 , 希望能够得到一些借鉴和参考。
关键词 : 二 次 补偿 ; 晶振 ; 稳 定性 ; 恒 温控 制
拐点 , 尤其是在超 过 6 0摄 氏度以后会呈现单 调上升趋势 , 这就 能够符合该设计 二次补偿 的条件 ,此时应当采用恒温加热 的方 式最大限度的缩 小实 际工作 的温度 区间 。 等到通 电后 , 热敏 电桥 会在瞬间产 生较 大的失衡输 出电压 ,功率管立即处于加热功率 的最大值 。而且 电桥失衡 电压会伴随着晶振 内部温度不断上升 而逐渐减小 , 待加热到所 需控 制温度 时 , 电桥的平衡输 出电压会 然后使用温补网络结合压控端 电压频率的控制关系 ,根据实际 维持在一个 固定值上 , 控 温电路通过平衡加热 , 此时产生的热量 如果外界温度发生 了变化 , 热敏 电阻阻 情况输 出合适的压控 电压 ,从而对恒温后的压控温补晶振加 以 与损耗 的热量保持一致 。 二次补偿 , 最终让频率温度稳 定度达 到最优状态 。 值必然 随之发生变化 ,电桥相对平衡 输出电压 也一 定会 发生改 二、 关 键 技 术 的 使 用 变 ,此 时相关工作人员应当通过调整 电流 和电压来 修正晶振内 ( 一) 合 理 选择 S MD 压 控 温 补 晶振 部 的温度变化 。 前面已经提 到,此方案采用的是简易型温补网络进行二次 ( 四) 调 试 补 偿 网络 补偿方式 , 其 网络输出的电压 为单调趋势的线性 电压 , 为了满足 观察发现 , 该设计所选用 的 S MD压控温补压控 晶振 的斜 率 使用的需要 ,就必须要求恒温后的压 控温补 晶振 温度频 率曲线 为 正值 , 此时压 控频率 拉动关 系为 + 0 . 0 5 V或者 + 0 . 3 8 H Z, 经 过 必 须也是单调线性 , 不允许有拐点 的存在。除此之外 , 由于数 字 恒温控 制后 的温度频率特 性曲线为单调上 升( 线性 ) , 在这种情 补偿 的温度 曲线非连续线性曲线 ,一定要使用模拟补偿 的压 控 况下业 界人士应 当第一 时间将热敏 电阻 R T 1 弃用 ,转 而选择 温补晶振 , 而且受到尺寸上 的严 格限制 , 经过无数次 的测试 , 最 R T 2的统一规格 ,从而设定 R 3 、 R 4 、 R 6的估值 电阻准确 的计算 好 的选择就是 S MD 3 2 " 2 5压控温补晶振。 出R 5阻值( 反 向电压 曲线后 ) 。 三、 结 语 ( 二) 选择 网络补偿 结果表 明, 经过恒温加热 的压控温补晶振 , 在一 2 0摄 氏度 至 综上所述 , 随着现代通信 技术 的迅猛发展 , 传统 的二次补偿 7 0摄氏度范围 内工作的条件下 , 其温度频率特 性得 到很大程度 恒温 一温补 晶振的设计必须要有所改变 。我们从测试结果可 以 的改善 , 在正常情况下能够很好的满足二次补偿 , 该设计选用 的 清楚的看到 ,采用恒温控制加二次补偿的方法能够将温度频率 稳定度有效控制在 5 " 1 0 范 围内。 但是需要特别提醒的是 , 该方 是简易温补 网络 , 具体设计如下图( 图1 ) 所示 。 案没有采用单 片机 , 这将会在很大程度上降低成本投入 , 而且又 兼具体积小 和功耗低 的明显优势( 相 比恒温 晶振而言 ) 。 另外 , 相 关工作人员在选择压控温补 晶振的过程中 ,为了最大限度的满 足恒 温控制 以及二次补偿的条件 ,必 须使其压 控频 率特性以及 温度频率特性保持高度 的一致。这样 就可 以很好 的弥补传统温 补晶振 的不足 , 更好 的满足市场需要 。
相参FMCW导航雷达方案设计与信号仿真

相参FMCW导航雷达方案设计与信号仿真朱江;董健;王雪松【摘要】相比于脉冲模式工作的雷达系统,调频连续波(FMCW)系统具有高距离分辨率、低成本、低功耗和无近距离盲区等优点。
根据导航雷达的研制需求,讨论并设计了一套切实可行的基于相参FMCW体制的导航雷达实现方案。
该方案深入分析了FMCW雷达目标探测原理,合理设计了系统结构和信号处理流程,并完成了系统的指标参数解算、雷达系统建模与信号处理仿真。
经过论证,该导航雷达设计方案具有可行性和有效性。
%Compared with impulse radar,frequency modulated continuous wave(FMCW)system has advantages of higher range resolution,lower cost,lower power dissipation and no blind region at short range. According to actual demands on naviga-tion radar,an implementation scheme of the feasible navigation radar based on coherent FMCW form is analyzed and designed in this paper. The operating principle of FMCW radar is analyzed deeply in the scheme. The system′s total structure and the flow of signal processing are designed reasonably. Parameter calculation,radar modeling and signal simulation of the system were ful-filled. The verification results show the feasibility and effectiveness of the system.【期刊名称】《现代电子技术》【年(卷),期】2014(000)019【总页数】5页(P1-5)【关键词】相参FMCW系统;导航雷达;信号处理;建模仿真【作者】朱江;董健;王雪松【作者单位】国防科学技术大学电子科学与工程学院,湖南长沙 410073;国防科学技术大学电子科学与工程学院,湖南长沙 410073;国防科学技术大学电子科学与工程学院,湖南长沙 410073【正文语种】中文【中图分类】TN957.51-34导航雷达作为当代雷达技术的一项重要应用领域,继20世纪40年代问世以来一直受到各国的重视,不论是在军事上的反恐作战、敌情预警、还是民用上的防撞规避、灾害救援等方面,均有广泛的应用前景。
晶振主要参数
晶振主要参数晶振是一种电子元件,可以将电信号转换成机械振动信号,广泛应用于电子产品中。
晶振的主要参数包括频率、精度、稳定性、温度系数、负载能力等。
1. 频率:晶振的频率是指其振荡的频率,通常用赫兹(Hz)表示。
不同的应用需要不同的频率,常见的频率有4MHz、8MHz、16MHz等。
频率越高,晶振的精度和稳定性就越高,但成本也越高。
2. 精度:晶振的精度是指其输出频率与标称频率之间的偏差,通常用ppm(百万分之几)表示。
例如,一个10MHz的晶振,如果其精度为±50ppm,那么其实际输出频率可能在10MHz的基础上偏差不超过500Hz。
精度越高,晶振的稳定性就越好,但成本也越高。
3. 稳定性:晶振的稳定性是指其输出频率在长时间使用中的变化程度,通常用ppm/年表示。
例如,一个10MHz的晶振,如果其稳定性为±10ppm/年,那么在一年的时间内,其输出频率可能会发生不超过100Hz的变化。
稳定性越高,晶振的可靠性就越好,但成本也越高。
4. 温度系数:晶振的温度系数是指其输出频率随温度变化的程度,通常用ppm/℃表示。
例如,一个10MHz的晶振,如果其温度系数为±10ppm/℃,那么在温度变化1℃的情况下,其输出频率可能会发生不超过100Hz的变化。
温度系数越小,晶振的稳定性就越好,但成本也越高。
5. 负载能力:晶振的负载能力是指其能够驱动的负载电容的大小,通常用pF表示。
例如,一个10MHz的晶振,如果其负载能力为20pF,那么其输出频率可能会因为负载电容的变化而发生不超过100Hz的变化。
负载能力越大,晶振的适用范围就越广,但成本也越高。
总之,晶振的主要参数包括频率、精度、稳定性、温度系数、负载能力等,不同的应用需要不同的参数。
在选择晶振时,需要根据具体的应用需求来选择合适的晶振,以保证系统的稳定性和可靠性。
石英晶体的应用资料
石英晶体的应用一.石英晶体元器件的分类和相关术语石英晶体元器件一般分为三大类,即石英晶体谐振器,石英晶体振荡器和石英晶体滤波器。
1.1 石英晶体谐振器相关的术语标称频率晶体元件规范指定的频率串联谐振频率(Fs) 等效电路中串联电路的谐振频率并联谐振频率(Fp) 等效电路中并联电路的谐振频率负载频率(FL) 晶体带负载时的频率负载电容(CL) 与谐振器联合决定工作频率的有效外界电容静电容(C0) 等效电路中与串联臂并联的电容动电容(C1) 等效电路中串联臂中的电容动态电感(L1) 等效电路中串联臂中的电感动态电阻(R1) 等效电路中串联臂中的电阻频率精度工作频率与标称频率的偏差等效电阻(ESR) 谐振器与规定的负载电容串联的总阻抗频率温度特性频率随温度变化的特性室温频率偏差谐振器在室温下频率的偏差频率/负载牵引系数(Ts) 负载电容对频率影响的能力老化率晶体频率随时间的漂移Q值晶体的品质因数激励功率(电平)谐振器工作时消耗的功率激励功率依赖性(DLD) 谐振器在不同激励功率下参数的特性温度频率偏差频率随温度变化与标称频率的偏差工作温度范围谐振器规定的工作温度范围泛音晶体的机械谐波寄生响应晶体除主响应(主频率)外的其他频率的响应1.2 石英晶体振荡器石英晶体振荡器是目前精确度和稳定度最高的振荡器。
石英晶体振荡器是由品质因素极高的谐振器(石英晶体振子)和振荡电路组成。
晶体的品质、切割取向、晶体振子结构及电路形式等因素共同决定了振荡器的性能。
相关术语标称频率晶体元件规范指定的频率频率温度特性振荡频率随温度变化而改变的特性长期频率稳定度振荡器长时间工作频率的稳定性短期频率稳定度振荡器短时间工作频率的稳定性温度频率偏差振荡频率随温度的偏差室温频率偏差在室温时振荡频率的偏差起振时间振荡输出达到规定值的时间上升时间(方波输出)方波输出时波形从10%到90%所需的时间下降时间(方波输出)方波输出时波形从90%到10%所需的时间占空比(方波输出) 方波输出时正脉冲宽度占周期的百分比频率精度振荡频率相对标称频率的精确程度消耗电流振荡器工作时消耗的电流相位噪声信号中相位的随机变化量最大电压(方波输出)振荡器输出电压最大值最小电压(方波输出)振荡器输出电压最小值基准温度初始精度振荡器在规定基准温度下的振荡频率的精度频率—电压允差根据输入电压的最大,最小和标称值来确定频率—负载允差根据负载的最大,最小和标称负载来确定谐波与副谐波失真谐波和副谐波响应的程度杂波响应规定带宽内与杂波输出有关的非谐波响应耐过压能力振荡器经受120%规定电源电压的最大的过压能力峰-峰值(Vpp)输出电压最大与最小的差值负性阻抗晶体串联电阻,使振荡器从振到不振时的阻值当前石英晶体振荡器的发展,不仅表现在系列品种的增加和市场需求量的增长方面,而且体现在产品技术创新上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Symb
Vcc Ts Vc F ⊿F ⊿F To
Condition
Min.
-0.5 -55 -1 8
Typ.
Max.
+7.0 +90 +6.0 160
Unit
V ℃ V MHz MHz ppm ppm ppm ppm ℃
Note
Absolute Maximum Ratings
Electrical
Frequency Range Nominal Freq. Frequency Accur. Frequency Stability Operating Temp. Aging Allan Variance Output Waveform Output Level Load Harmonics Att. Spurious Att. Phase Jitter Period Jitter SSB Phase Noise Retrace G-Sensitivity Supply Voltage Power Consumption Warm-up Time 12.800 25℃ Vs. temp. Vs .supply variation Vs .load variation -40 Per day First year 20 years For 1s 5 2E-10 3E-8 2E-7 Sinewave,50Ω 9 50 ±0.01 ±0.1 ±0.02 ±0.005 ±0.005 +80 3E-10 5E-8 3E-7 5E-12 12 Custom
OCXO
WOC-14D Series Micro-miniature OCXO Product Data Sheet
WINTR●N
INNOVATION BEYOND IMAGINATION
Features
z z z z z z z z z z z Small DIP14 Compatible Package High Vacuum Sealed Crystal Low Power to 0.2W at 25℃ Steady State Fast Warm-up Time to 30 Seconds Stratum 3 tight stability and low jitter Low Aging(3×10-10/Day, 5×10-8/Year) Low Aging ±0.3ppm max over life Very Low Phase Noise(-165dBc/Hz Typ. At Floor) HCMOS/TTL ,Sinewave(50 Ohm)Output Optional Voltage Control Optional
4.75 5.0 Steady state,25℃ W Warm-up,25℃ To ±0.1 ppm accur. Seconds EFC Voltage 0 2.1 V ±0.5 EFC Range ppm Linearity ±10 % Deviation Slope Positive Input impedance 100 KΩ Pin 1-Vcon or NC; Pin 2-Vref; Pin 7-GND; Pin 8 –RF Out; Pin 14 – Vcc DIP(21.85X15.1X10) mm
0.3
Frequency Adjustment
Vcon
Pin Out Package Temperaure Cycle Mechanical Shock Vibration Solvent Resistance Lead Integrity Leak Testing Solderability Soldering Condition
-30 -80 1 1 -120/-95 -150/-140 -160/-160 ±20 ±1.0 5.25 0.25 1.20 90 4.2
dBm Ω dBc dBc ps.rms ps.rms dBc/Hz ppb ppb/G V 24 hours off 3.3V ± 5% Optional
At 5.0V Custom Positive slope
Temperature Stability Code Specification 57 5x10-7 58 5x10-8 18 1x10-8 59 5x10-9 19 1x10-9 YZ Yx10-Z
Code S C
Output Wave Specification Sinewave HCMOS/TTL Other Options
Creating a Part Number
WOC-14D -
Frequency, MHz
Supply Voltage Code Specification 5 5.0V±5% 3.3 3.3V±5%
Temperature Range Code Specification A 0℃ to 50℃ B -10℃ to 60℃ C -20℃ to 70℃ D -30℃ to 70℃ E -40℃ to 80℃ F -55℃ to 85℃
6.3
OCXO
WOC-14D Series Micro-miniature OCXO Product Data Sheet
Specification
Parameter
Input Break Down Voltage Storage Temp. Control Voltage
WINTR●N
INNOVATION BEYOND IMAGINATION
15.1
Bottom View
20.5 15.24 8 7.62 Φ1.1 7 2 1 0.8 2.07 2.54 14 14 1.63
500 600
1.63
SARSAT Beacons,Microwave Sources, Synthesizers Navigation,Space,Wireless communications Battery Powered Systems and Equipment,Instrumentation
Please visit our website at ,or ,for any inquiry ,please consult your local sales offices.
All parameters for 12.800 MHz
See chart below Vcc(±5%) Load(±5%)
BW=12KHz to 20MHz 10Hz / 1Hz 1KHz / 100Hz 100KHz / 10KHz After 30 minutes Worst direction Vcc P -135/-105 -160/-150 -168/-165
z
Pin Function:
Pin Functions:
Temperature( C)
300
Solder Profile
Pin No 1 2 7 8 14
FUNCTION Vcon or NC Vref,4.2V GND RF Out Vcc
250 230℃ 200 185℃ 150 100 50 0 100 180 Sec 200 120 Sec 300 400 30 Sec.Max 90 Sec. Max
Time( Sec.)
TEST CIRCUIT-Sinewave,50Ω
Vref Vcc POWER SUPPLY PROBE Top view FREQ COUNTER
A
0.01uF 14 1 2
10KΩ
V
8 7
50Ω
SCOPE
GND
GND
86
Please visit our website at ,or ,for any inquiry ,please consult your local sales offices.
0.5
RoHS
EARTH FRIENDLY
Front View
21.85 Φ12.7
8 MHz to 160 MHz Frequplications
z z z z z Telecommunications Systems, PCS Base Stations Data Communications, Synthesizers. GPS,Radar Communications
87
Environmental and Mechanical
Per MIL-STD-883E, Method 1010.7, Cond. B(-55℃ to +125℃, 10-100 Cycles) Per MIL-STD-202, Method 213, Condition D, 500G’s, 1ms, Half Sine, 3 shocks per direction. Per MIL-STD-202, Method 204, Condition A. 10G, 10Hz to 2000Hz,15minute cycles 12 times each perpendicular axis. Per MIL-STD-883E, Method 2015.8 Per MIL-STD-883E, Method 2004 Per MIL-STD-883E, Method 1014 Per MIL-STD-883E, Method 2003 Leads temperature 260℃ for 10s max,230℃ for 30s max, SMD profile